GUIAS ÚNICAS DE LABORATORIO
DIAGRAMA DE ESTADOS
AUTOR: ALBERTO CUERVO
SANTIAGO DE CALI
UNIVERSIDAD SANTIAGO DE CALI
DEPARTAMENTO DE LABORATORIOS
DDEEPPAARRTTAAM
MEENNTTOO DDEE LLAABBOORRAATTOORRIIOOSS
GGUUIIAASS DDEE DDIIAAGGRRAAM
MAA DDEE EESSTTAADDOOSS
DIAGRAMA DE ESTADOS
OBJETIVO
El diseño de un circuito secuencial sincrónico comienza a partir de un conjunto de
especificaciones y culmina en un diagrama lógico de un circuito o una lista de funciones
de Boole a partir de las cuales se puede obtener el diagrama lógico.
El primer paso en el diseño consiste en describir en palabras el comportamiento deseado
del circuito. Frecuentemente el paso siguiente consiste en construir el diagrama de
estados a partir de la descripción en palabras del funcionamiento deseado, para poder, a
partir del diagrama de estados elaborado, obtener el diagrama lógico del circuito
digital.
El presente trabajo tiene como objetivo reforzar los conocimientos adquiridos por el
estudiante en el diseño de circuitos digitales secuenciales sincrónicos partiendo de su
diagrama de estados.
Se utilizan elementos del módulo DIGI
BOARD2 de System Technik adquirido
recientemente por la Universidad Santiago de Cali.
PLANTEAMIENTO DEL PROBLEMA
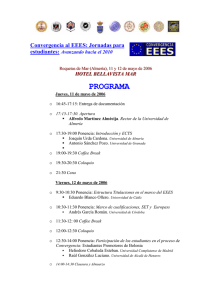
A continuación se muestra el diagrama de estados de cierto sistema digital, el cual se
mantiene en el estado T0 hasta que una señal de entrada externa qm le indique a la
unidad de control (circuito secuencial) que debe comenzar una operación. Cuando el
sistema digital termina de realizar la operación, la señal Pz = 1 le indica a la unidad de
control que la operación está terminada, regresando al estado inicial T0.
Pz=1
T0
T1
T3
T2
qm=1
qm = 0
Pz=0
DDEEPPAARRTTAAM
MEENNTTOO DDEE LLAABBOORRAATTOORRIIOOSS
GGUUIIAASS DDEE DDIIAAGGRRAAM
MAA DDEE EESSTTAADDOOSS
Las actividades que debe realizar el sistema digital en cada uno de los estados son las
siguientes:
T0 : nada, la ocurrencia de este estado indica que la operación está completa
T1 : A←
←#0, P←
←#3
←P-1
T2 : P←
T3: A←
←A+B
A es un registro de 4 bits (el registro SRG4 del laboratorio) y B es un número de 4 bits
generado por uno de los teclados.
P es un contador binario de cuatro bits (CTRDIV16 del laboratorio) y Pz será una señal
que indique cuando P = 0, por lo que Pz debe ser obtenida a la salida de una NOR de los
cuatro bits del contador P. Por tanto, si Pz = 0 ⇒ P ≠ 0, de lo contrario, si Pz = 1 ⇒ P=0.
Utilice los flip-flops JK del laboratorio convertidos en tipo D para implementar la
unidad de control (el circuito secuencial), por el método de 1 flip-flop/estado.
Utilice el pulsador (29) para la señal qm, y el generador (27) con el divisor (28) para
obtener la señal de los pulsos de reloj del sistema con una frecuencia de 1 Hz.
Preguntas:
•
•
¿Qué operación realiza este sistema digital?
Si B = 2, esto es, si usted coloca el #2 en el teclado cuya salida es el número B
a.- ¿cuál será el número contenido en el registro A al final del estado T3 siendo P =
2?
b.- ¿cuál será el número contenido en el registro A al final del estado T3 siendo P =
1?
c.- ¿cuál será el contenido del registro A una vez terminada la operación?
d.- Este sistema digital ¿corresponde a un modelo de Moore o de Mealy?
Diseñe completamente su sistema digital especificando muy claramente todas las
conexiones que efectuará, incluyendo las conexiones de la unidad de control (circuito
secuencial) al procesador de datos (registro A, contador P, etc.). Utilice un mínimo de
compuertas lógicas.
Trabajo en el laboratorio:
Montaje y verificación de su sistema digital diseñado. Para lo cual haga los siguientes
pasos:
• Con las entradas asincrónicas de los flip-flops, coloque el estado inicial T0
• Aplique los pulsos de reloj con una frecuencia de 1 Hz.
• Presione el pulsador para sacar al sistema del estado T0. Tan pronto salga de este
estado, suelte el pulsador.
• Verifique que el sistema digital termina con el resultado esperado.
DDEEPPAARRTTAAM
MEENNTTOO DDEE LLAABBOORRAATTOORRIIOOSS
GGUUIIAASS DDEE DDIIAAGGRRAAM
MAA DDEE EESSTTAADDOOSS
Observación: El estado del sistema digital debe ser visualizado en los LEDs, y las salidas
de los registros A y P deben ser llevadas al display de 7 segmentos para poder ir
observando las actividades que va realizando el sistema digital en los distintos estados.
SOLUCIÓN
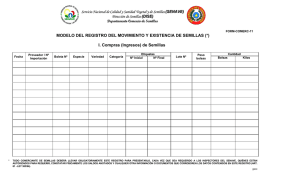
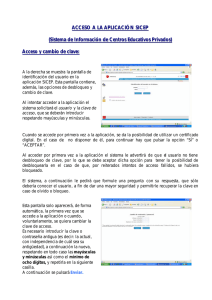
En la página siguiente se muestran los circuitos del control y del procesador de datos.
Como el sistema tiene 4 estados, se utilizarán cuatro flip-flops JK convertidos en flipflops tipo D conectando un inversor entre la J y la K de los mismos.
Las funciones de las entradas de excitación D de los flip-flops serán como se explica a
continuación.
Flip-flop To: En el diagrama de estados se observa que el circuito debe pasar al estado
To cuando ocurra un pulso de reloj si se encuentra en el estado T3 y Pz = 1 ó si se
encuentra en el estado To y qm = 0. Por tanto, Do = qm´To + PzT3
Flip-flop T1: Se debe pasar al estado T1 si el circuito se encuentra en el estado To y qm
= 1, por tanto D1 = qmTo
Flip-flop T2: Al estado T2 se debe pasar si el circuito se encuentra en el estado T1 ó si se
encuentra en el estado T3 y Pz = 0, por tanto D2 = T1 + Pz´T3.
Flip-flop T3: Se debe pasar al estado T3 en forma incondicional si el sistema se
encuentra en el estado T2, por tanto D3 = T2.
Pz
qm
Do = qm´To + PzT3
Q
Q
1J
qm
To
reloj: frec = 1Hz
.
Q
1J
1K
Pz
Q
1J
T1
1K
T2
Q
1K
T3
Q
1K
Unidad de Control
D1 = qm To
D2 = Pz´T3 + T1
Q
1J
D3 = T2
DDEEPPAARRTTAAM
MEENNTTOO DDEE LLAABBOORRAATTOORRIIOOSS
GGUUIIAASS DDEE DDIIAAGGRRAAM
MAA DDEE EESSTTAADDOOSS
Q
T3
reloj
registro A
SRG4
(P)
CTRDIV16
0 M0/3
1
C4
reloj
1
R
T1
T2
CT=0
2+
G1
1G2
C3
Sumador
/2
B
0
1
0
0
0
1
2Q
3
0
1
2
3
CI
P
T1
0
1
2
3
Pz
1
Observe que en el estado T3, el modo del registro A = 11, por tanto la salida del
sumador se cargará en este registro con el flanco positivo del pulso de reloj en este
estado, etc.
Respuesta: el sistema multiplica el número B por el número 3 que se almacena durante
T1 en el registro P.
BIBLIOGRAFÍA
1. Víctor P. Nelson, H. Troy Nagle, Bill D. Carroll y J. David Irwin, “Análisis y Diseño de
Circuitos Lógicos Digitales”, Prentice-Hall Hispanoamericana S.A., 1996
2. M. Morris Mano, “Lógica Digital y Diseño de Computadores”, Editorial Dossat S.A.,
1982
3. System Technik, “DIGI BOARD2 Descripción Técnica “
4. J.F. Wakerly, “Digital Design Principles and Practices “, 2ª ed., Englewood Cliffs, NJ:
Prentice-Hall, 1994.
5. ZVI Kohavi, “Switching and Finite Automata Theory”, McGraw-Hill Book Co., 1970
DDEEPPAARRTTAAM
MEENNTTOO DDEE LLAABBOORRAATTOORRIIOOSS
GGUUIIAASS DDEE DDIIAAGGRRAAM
MAA DDEE EESSTTAADDOOSS
Pz
 0
0