Geometric Concepts
Anuncio

Page: 0/13
September 2, 2011
Graduado en Ingeniería Aeroespacial
Mecánica Clásica
Introducción
Jesús Peláez Álvarez
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Dynamics. Introduction
Page: 1/13
September 2, 2011
• La palabra Mecánica viene del vocablo griego μηχανικη que significa máquina. Puede definirse como la ciencia que estudia el
movimiento de los objetos materiales y las circunstancias que influyen en el mismo. La pluralidad de objetos y movimientos hace que
la Mecánica se divida en diferentes ramas: Mecánica Clásica, de Fluidos, Relativista, Cuántica, de Medios Contínuos, Estadística, etc.
Todas ellas estudian el movimiento de objetos materiales, pero lo hacen desde puntos de vista muy diferentes.
• Atendiendo a su tamaño, los objetos del Universo se agrupan en: microscópicos, macroscópicos y astronómicos. Son microscópicos
los objetos de tamaño atómico o subatómico; son astronómicos los de tamaño estelar o galáctico. Los objetos macroscópicos ocupan
una posición intermedia, es decir, son grandes frente a los microscópicos y, simultáneamente, pequeños frente a los astronómicos.
• Es posible distinguir, también, entre movimientos de alta y baja velocidad. En los primeros, la velocidad característica es próxima
a la velocidad de la luz. En los segundos, por el contrario, es pequeña comparada con la velocidad de la luz.
• La Mecánica Clásica es la ciencia que estudia el movimiento de objetos macroscópicos a bajas velocidades. Se divide en dos
grandes apartados: Cinemática, del griego κινημα, MOVIMIENTO y Dinámica, del griego δυναμις , FUERZA. La primera pretende
describir el movimiento, haciendo abstracción de las causas que lo provocan. La segunda, por el contrario, pretende establecer relaciones
entre el movimiento y las causas que lo originan.
• Dentro de la Mecánica Clásica, los sistemas deformables complejos, como pueda ser una masa de fluido, son estudiados por
disciplinas específicas, en concreto, la Mecánica de Medios Continuos. Poseen un número infinito de grados de libertad y su movimiento
está gobernados por ecuaciones diferenciales en derivadas parciales. En este curso se estudian sistemas con un número finito de
grados de libertad, cuyo movimiento está gobernado por ecuaciones diferenciales ordinarias.
• El problema básico al que se enfrenta la Mecánica es: dadas las fuerzas que actúan sobre un sistema material conocido y las
ligaduras a que está sometido, determinar el movimiento que las partículas adoptan respecto de una referencia galileana y las fuerzas
de ligadura que se ejercen sobre el sistema, si se conocen las posiciones y velocidades de las partículas del sistema en el instante
inicial. Para resolverlo, es necesario realizar hipótesis adicionales sobre las fuerzas de ligadura.
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Kinematics
Page: 2/13
September 2, 2011
• La Cinemática es la parte de la Mecánica que tiene por objeto la descripción y el estudio del movimiento de los sistemas materiales,
independientemente de las causas que lo originan. En ella sólo intervienen dos magnitudes fundamentales, longitud y tiempo. Ambas
son imprescindibles para describir la posición de los objetos y los cambios que dicha posición sufre en el transcurso del tiempo, esto
es, las propiedades intrínsecas del movimiento. Conceptos esenciales en Mecánica, como puedan ser, masa, fuerza, energía, etc, están
ausentes en la descripción cinemática de un sistema material.
• La Cinemática es, en su mayor parte, una prolongación de la Geometría. En ella aparece una nueva variable, el tiempo, ausente en
la descripción geométrica del espacio. La descripción de la posición —y demás propiedades— de un sistema material en función de la
variable temporal, es esencial a la Cinemática.
• Los sistemas materiales más sencillos son el punto y el sólido rígido. Por tanto, se comenzará por la Cinemática del Punto, donde
se describe con detalle el movimiento de la partícula material. Posteriormente, se estudiará la Cinemática del Sólido donde se analizará
el movimiento de un sólido. Conviene dejar claro desde el principio el concepto de sólido rígido, o simplemente, sólido. Un sólido es una
sistema de partículas materiales que verifica la siguiente propiedad: la distancia entre dos cualesquiera de sus partículas permanece
constante en el transcurso del movimiento.
• Se admite que el espacio en el que tienen lugar los fenómenos que se estudian, está caracterizado por tres propiedades básicas: es
ilimitado, homogéneo e isótropo. Homogéneo significa que sus puntos no presentan propiedades intrínsecas que permitan singularizarlos,
esto es, todos ellos son equivalentes. Isótropo significa que no existen direcciones privilegiadas, esto es, todas las direcciones son
equivalentes. En Mecánica Clásica el espacio se describe apropiadamente con ayuda del concepto matemático de espacio afín euclídeo
tridimensional, esto es, un espacio afín asociado a un espacio vectorial euclídeo de dimension tres. Una propiedad característica del
tiempo es su irreversibilidad; está ligada al denominado principio de causalidad según el cual, los efectos no pueden ser anteriores a
las causas que los provocan. Por ello, el tiempo se considera siempre una variable real monótona creciente, la misma para todas las
referencias, independientemente de su estado cinemático.
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 3/13
September 2, 2011
Geometric Concepts
C ONCEPTO DE CURVA
Dada una referencia cartesiana rectangular Oxyz , una curva en el
espacio se concibe como la trayectoria seguida por un punto M en
movimiento; la posición ocupada por M en un instante cualquiera
t, está determinada por sus tres coordenadas (x(t), y(t), z(t)).
Por tanto, y desde un punto de vista matemático, una curva es
un lugar geométrico de puntos que dependen continuamente
de un único parámetro a través de ecuaciones del estilo
x = x(u), y = y(u), z = z(u),
z
M, u
z(u)
u ∈ [u1, u2]
Las funciones (x(u), y(u), z(u)) deben cumplir ciertos requisitos
de regularidad como enseña la Geometría Diferencial. Por ejemplo, no pueden ser las tres constantes, pues en tal caso proporcionarían un punto y no una curva. En general, se suele solicitar
que sean funciones de clase 3 , esto es, que tengan derivadas terceras continuas. Frecuentemente las ecuaciones se escriben en
forma condensada como
y
O
x(u)
x
y(u)
F IGURA 1.1: Curva
x = x(u)
en el espacio
Esta ecuación recibe el nombre de ecuación vectorial de la curva.
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 4/13
September 2, 2011
Geometric Concepts
L ONGITUD DE ARCO . TANGENTE
s
Dada una curva Γ de representación paramétrica x = x(u), si son
P y Q dos de sus puntos, que se obtienen para los valores u0 y u del
parámetro, respectivamente, el Análisis Matemático enseña que la
longitud del segmento de curva comprendido entre P y Q está dada
por
Q
u
u1
2
2
2
L=
ds =
ẋ + ẏ + ż du =
|
x˙ (u)|du
P
u0
Q, u
P, u0
Tangente
u0
Un parámetro longitud de arco es el dado por
u
˙
s(u) =
| x(u)|du
x˙ (u0 )
Secante
u0
P, u0
Secante P Q: pasa por P y tiene la dirección de uno cualquiera de
los dos siguientes vectores:
x(u) − x(u0),
o bien
x(u) − x(u0)
u − u0
Tangente en P : valor límite de la secante P Q cuando Q → P . Pasa
por A y tiene la dirección de:
x(u) − x(u0)
x˙ (u0) = lim
u→u0
u − u0
Q, u
F IGURA 1.2: Longitud
de arco. Tangente
El vector
x˙
dx
t = =
ds
|
x˙ |
se denomina vector tangente unitario en P .
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 5/13
September 2, 2011
Geometric Concepts
P LANO OSCULADOR
Q, u
Sea P (u0 ) un punto de la curva y T la recta tangente en el
mismo. Sea Q(u) otro punto de la curva y π(u) el plano
determinado por la recta tangente T y el punto Q. Dos
˙ 0) y el
vectores de la dirección de dicho plano son el x(u
x(u) − x(u0). Por consiguiente, también son vectores de su
dirección los siguientes
˙ 0),
x(u
x(u) − x(u0)
2
˙ 0)}
{
− x(u
u − u0
u − u0
P, u0
Plano π(u)
Q, u
(1.1)
Cuando el punto Q tiende al punto P , esto es, u → u0 , el
plano π(u) tiende a una posición límite; dicho plano límite se
denomina plano osculador y es fácil ver que dos vectores de
¨ (u0). Basta con hacer el límite
x˙ (u0) y x
su dirección son u → u0 en los vectores de (1.1).
El nombre viene de osculo (beso en latín). Literalmente, el
plano osculador es el plano que besa la curva. Se subraya así
el hecho de que, entre todos los planos que pasan por P , el
osculador es el que tiene el mayor orden de contacto con la
curva.
P, u0
Plano π(u)
x(u) − x(u0)
x˙ (u0)
F IGURA 1.3: Plano
definido por la tangente en P y un punto Q
genérico
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 6/13
September 2, 2011
Geometric Concepts
P LANO OSCULADOR
P LANO NORMAL
b(u0)
x˙ (u0)
P, u0
De los infinitos planos ortogonales a la recta tangente a Γ en
P (u0), el que pasa por P (u0 ), se denomina plano normal a
la curva en P . Tiene por ecuación
˙ 0) · (y − x(u0)) = 0
x(u
¨ (u0)
x
Plano osculador
Plano normal
P, u0
F IGURA 1.4: Plano
osculador de una curva plana
x˙ (u0)
Si la curva es plana, el plano osculador en todos sus puntos
es el mismo: el plano que contiene a la curva.
Si la curva es alabeada, el plano osculador en un punto P (u0 )
contiene, en primera aproximación, a los puntos de la curva
próximos a P (u0 ). En efecto, el desarrrollo de Taylor permite
poner
1¨
x(u)−x(u0) = x (u0)(u−u0)2 +O((u−u0)3 )
x˙ (u0)(u−u0)+ 2
F IGURA 1.5: Plano
normal en P (s0 )
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 7/13
September 2, 2011
Geometric Concepts
R ECTA NORMAL PRINCIPAL
T RIEDRO INTRÍNSECO : (t, n, b)
De entre todas las rectas normales a la curva en P (u0 ), la
normal principal es la recta intersección del plano normal
y el osculador. Sus ecuaciones se obtienen cortando ambos
planos
Recta binormal
Circunferencia osculatriz
Eje polar
˙ 0) · (y − x(u0)) = 0
x(u
˙ 0) × ¨
( x(u
x(u0)) · (y − x(u0)) = 0
Plano normal
b(u0)
R ECTA BINORMAL
Se denomina binormal a la recta que pasa por P (u0 ) y es
ortogonal al plano osculador. Su ecuación vectorial es
˙ 0) × ¨
y = x(u0) + λ ( x(u
x(u0)).
P, u0
Recta normal principal
Plano rectificante
Centro de curvatura
n(u0)
t(u0)
Plano osculador
Se denomina binormal porque es una recta contenida en el
plano normal, y por tanto perpendicular a la tangente, y dentro de ese plano es normal a la normal principal.
Recta tangente
F IGURA 1.6: Triedro
intrínseco en P (u0 )
P LANO RECTIFICANTE
El formado por las rectas binormal y tangente.
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 8/13
September 2, 2011
Geometric Concepts
C ÁLCULO DEL TRIEDRO INTRÍNSECO
T RIEDRO INTRÍNSECO : (t, n, b)
Las tres rectas, tangente, normal y binormal forman las aristas
de un triedro que se denomina triedro intrínseco de la curva
Γ en el punto P .
Los vectores unitarios que marcan la dirección de los tres ejes
del triedro intrínseco son (t, n, b). Estos vectores unitarios
reciben los nombres
t
n
b
Recta binormal
Circunferencia osculatriz
Eje polar
Plano normal
→ vector tangente unitario
→ vector normal principal unitario
b(u0)
→ vector binormal unitario
Los vectores unitarios del triedro intrínseco se calculan a partir de las expresiones siguientes
˙
t = x(u) ,
˙
| x(u)|
˙
¨
b = x(u) × x(u) ,
˙
| x(u)
× ¨
x(u)|
P, u0
Plano rectificante
Centro de curvatura
n(u0)
t(u0)
Plano osculador
n = b × t
Además de las aristas del triedro, también se consideran elementos del triedro intrínseco los planos que se cortan en las
rectas anteriores.
Recta normal principal
Recta tangente
F IGURA 1.7: Triedro
intrínseco en P (u0 )
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 9/13
September 2, 2011
Geometric Concepts
C URVATURA
C IRCULO OSCULADOR . C ENTRO DE CURVATURA
Si el parámetro es una longitud de arco, la derivada primera del vector posición
es el vector tangente unitario
El círculo de radio R = 1/k, contenido en el plano osculador y cuyo centro está en la normal principal en el semiespacio al que apunta el vector curvatura k, se denomina círculo osculador de la curva en P . Es el que tienen
un contacto de mayor orden con la curva. Su centro se denomina centro de
curvatura de la curva en P . Finalmente, la recta que pasa por el centro de
curvatura y es paralela a la binormal se denomina eje polar de la curva en P .
El cálculo de la curvatura se lleva a cabo como sigue
t = x (s)
Obviamente t(s) · t(s) = 1 ⇒ t (s) · t = 0. Así, el vector t (s) =
x (s) pertenece al plano osculador y al plano normal; en consecuencia, tiene
la dirección de la normal principal.
Así pues, la normal principal tiene la dirección del vector k = x (s), que
recibe el nombre de vector curvatura; el vector unitario
n =
x (s)
|x (s)|
coincide con el vector normal principal unitario.
El vector x (s), cuando se expresa en función de n, adopta la forma
x (s) = k(s) · n(s)
con
k(s) = |x (s)|
donde el escalar k(s) se denomina curvatura de la curva en el punto considerado. Su inverso, que tiene dimensiones de longitud, se denomina radio de
curvatura R = 1/k.
La curvatura de una recta es, en todos sus puntos, nula (t es constante y por
tanto t = 0). La curvatura de una circunferencia de radio a es constante y
vale k = 1/a. La curvatura en un punto mide la rapidez con la que la curva,
en las proximidades del punto, se separa de la tangente.
El vector curvatura no cambia cuando cambia el sentido de recorrido de la
curva.
k(s) = |x (s)| = |x (s) × x (s)|
pues los vectores x (s) y x (s) son ortogonales y el primero es unitario.
Ahora bien
x (s) =
˙
x(u)
˙
| x(u)|
⇒
x (s) =
˙
du
d x(u)
)
(
˙
du | x(u)|
ds
y desarrollando el segundo miembro de esta expresión se obtiene sin dificultad
el valor de la curvatura
˙
| x(u)
× ¨
x(u)|
k=
.
˙
| x(u)|3
Tal como se ha definido la curvatura, k = |x (s)| es un escalar positivo, y
el vector normal principal unitario n tiene el mismo sentido que el vector
curvatura k.
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 10/13
September 2, 2011
Geometric Concepts
T ORSIÓN
C ÁLCULO DE LA TORSIÓN
De la condición b(s) · b(s) = 1
⇒
b (s) · b(s) = 0. Por tanto
b = αt + β n.
De la condición b(s) · t(s) = 0
⇒
b (s) · t(s) = −b(s) · t (s). Es decir
La torsión de una curva en un punto P es una medida de la rapidez con
que la curva se separa del plano osculador en las proximidades de P .
Si se admite que se dispone de una representación paramétrica en términos de
un parámetro longitud de arco de la curva, la torsión se calcula como sigue
τ = − n · b = − n · {t × n} = − n · {t × n } =
α = b (s) · t(s) = −b(s) · t (s) = −k(s)b(s) · n(s) = 0.
En consecuencia b (s) sólo tiene componente sobre la normal principal. Es
costumbre expresar dicha derivada en la forma
= −[ n, t, n ] = [t, n, n ]
ahora bien
n × n =
db = b = −τ n
ds
x
x
1
k
×{
− x 2 } = 2 (x × x )
k
k
k
k
y, en definitiva, se obtiene
donde el escalar τ recibe el nombre de torsión de la curva en el punto considerado; su inverso, que tiene dimensiones de longitud, T = 1/τ recibe el
nombre de radio de torsión.
En una curva plana el vector b es constante y ortogonal al plano de la curva.
En consecuencia la torsión de una curva plana es nula (b = 0). El recíproco
no es cierto, en general, debido a casos patológicos (una curva plana con un
punto de inflexión —por ejemplo, y = x3 ; se puede girar 90◦ media curva
alrededor de la tangente en el punto de inflexión y pasa a ser alabeada. La
curva resultante tendría torsión nula pero no sería plana). Estos casos patológicos se evitan si la curvatura de la curva no se anula: si una curva tiene
torsión nula en todos sus puntos, y su curvatura no se anula en ninguno, es
una curva plana.
τ=
1 [x , x , x ]
[
x
,
x
,
x
]
=
.
k2
|x |2
Si se dispone de un representación paramétrica en términos de un parámetro
cualquiera, no es difícil, mostrar que la torsión está dada por
...
3
˙
˙
[ x(u),
¨
x(u), x(u)] | x(u)|
τ=
˙
| x(u)
× ¨
x(u)|2
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 11/13
September 2, 2011
Geometric Concepts
F ÓRMULAS DE F RENET
T EOREMA FUNDAMENTAL
Las ecuaciones de Frenet se obtienen al expresar las derivadas
respecto del arco de los vectores del triedro intrínseco,
(t, n, b), como combinación lineal de los vectores del propio triedro intrínseco.
n (s) · n(s) = 0.
La condición n(s) · n(s) = 1 ⇒
Por ello,
n = αt + β b.
De las condiciones n(s) · t(s) = 0 y n(s) · b(s) = 0 se
deducen sin mayor dificultad los valores de α y β .
En definitiva, se obtienen las siguientes ecuaciones
Las ecuaciones que proporcionan la curvatura y la torsion de una
curva en función de un parámetro longitud de arco
dt = t = k n
ds
d n
= n = −kt + τ b
ds
db = b = −τ n
ds
que reciben el nombre de ecuaciones de Frenet de las curvas
alabeadas.
k = k(s),
τ = τ (s)
(1.2)
se denominan ecuaciones intrínsecas de la curva.
A partir de un representación paramétrica de una curva, pueden deducirse sus ecuaciones intrínsecas calculando su curvatura, torsión y
longitud de arco. Las ecuaciones intrínsecas son únicas y no dependen de la representación paramétrica de la que se parta. Las ecuaciones intrínsecas de una circunferencia de radio a son k = 1/a,
τ = 0, independientemente de su posición en el espacio.
Teorema fundamental de las curvas alabeadas: dadas las ecuaciones intrínsecas (1.2), si las funciones k(s) = 0 y τ (s) verifican
ciertos requisitos de continuidad, entonces definen una única curva
en el espacio, salvo traslaciones y giros.
Las ecuaciones intrínsecas k(s) = 1/a, τ (s) = 0 con a constante,
definen una circunferencia de radio a, salvo traslaciones y giros en el
espacio. Ni el plano de la circunferencia ni su centro están determinados, es decir, las ecuaciones intrínsecas no determinan la posición
de la curva en el espacio, pero determinan unívocamente la curva de
que se trata.
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 12/13
September 2, 2011
Geometric Concepts
El vector curvatura es
C URVAS PLANAS
2
2
k = t = dθ (− sin θ, cos θ) = ( d x , d y )
ds
ds2 ds2
y
n
t
En curvas alabeadas la curvatura k = |x | es siempre positiva y el
vector normal unitario n se elige con el sentido de k.
En curvas planas, sin embargo, es mejor usar un criterio diferente; los
vectores intrínsecos (t, n) se eligen de forma que tengan la misma orientación que los vectores (i, j) de la referencia cartesiana Oxy . Así, la
curvatura está dada por la expresión
θ
P
k
j
O
k=
i
x
F IGURA 1.8: Curvas
planas
En una curva plana se tiene:
t = (cos θ, sin θ) = ( dx , dy )
ds ds
Por tanto
dx = ds cos θ
dy = ds sin θ
dθ
ds
y tiene signo positivo cuando el sentido de n coincide con el de k; en
caso contrario, tiene signo negativo. Si se conoce la ecuación intrínseca
k = k(s), una integración proporciona:
s
θ(s) = θ0 +
k(s) ds
0
y una representación paramétrica de la curva será:
s
x(s) = x0 +
cos θ(s) ds
0
s
y(s) = y0 +
sin θ(s) ds
0
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC
Page: 13/13
September 2, 2011
Geometric Concepts
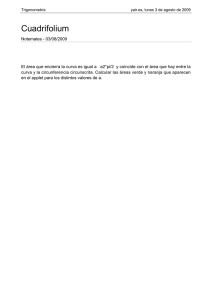
E JERCICIO
Calcúlese el triedro intrínseco, en un punto genérico, de la hélice circular
de representación paramétrica x = (a cos u, a sen u, bu)
z
˙
S OLUCIÓN : Los vectores x(u)
y ¨
x(u) resultan ser
˙
x(u)
= (−a sen u, a cos u, b)
¨
x(u) = (−a cos u, −a sen u, 0)
por tanto, los vectores del triedro intrínseco serán
t = (− cos α sen u, cos α cos u, sen α)
n = (− cos u, − sen u, 0)
b = (sen α sen u, − sen α cos u, cos α)
b
n
donde el ángulo constante α esta definido por
cos α = √
a
,
+ b2
a2
sen α = √
b
.
+ b2
a2
O
y
Nótese que la tangente a la hélice en uno cualquiera de sus puntos forma
un ángulo α con el plano Oxy .
La longitud de arco s, la curvatura k y la torsión τ resultan ser:
s=
a2 + b2 u,
k=
a2
a
,
+ b2
τ=
a2
α
t
b
+ b2
u
x
F IGURA 1.9: Hélice
circular
CAMPUS
DE EXCELENCIA
INTERNACIONAL
c by Jesús Peláez Álvarez
Mecánica Clásica. Edición 2011/2012. MC