índice de anexos - Repositorio Digital UTE
Anuncio

UNIVERSIDAD TECNOLÓGICA EQUINOCCIAL
FACULTAD DE CIENCIA DE LA INGENIERIA
CARRERA DE INGENIERÍA AUTOMOTRIZ
“ELABORACIÓN DE BANCO DIDÁCTICO DE UNA CAJA DE
CAMBIOS AUTOMÁTICA, PARA EL DIAGNÓSTICO DE
ELEMENTOS ELÉCTRICOS, ELECTRÓNICOS Y DE CONTROL
PARA EL LABORATORIO DE INGENIERÍA AUTOMOTRIZ”
TRABAJO PREVIO A LA OBTENCIÓN DEL TITULO DE INGENIERO
AUTOMOTRIZ
DIEGO PATRICIO CABRERA PAZMIÑO
DIRECTOR: ING. JULIO CESAR LEGUISAMO MILLA
Quito, mayo de 2014
© Universidad Tecnológica Equinoccial. 2014
Reservados todos los derechos de reproducción
DECLARACIÓN
Yo DIEGO PATRICIO CABRERA PAZMIÑO, declaro que el trabajo aquí
descrito es de mi autoría; que no ha sido previamente presentado para
ningún grado o calificación profesional; y, que he consultado las referencias
bibliográficas que se incluyen en este documento.
La Universidad Tecnológica Equinoccial puede hacer uso de los derechos
correspondientes a este trabajo, según lo establecido por la Ley de
Propiedad Intelectual, por su Reglamento y por la normativa institucional
vigente.
_________________________
Diego Patricio Cabrera Pazmiño
C.I. 1003616628
CERTIFICACIÓN
Certifico que el presente trabajo que lleva por título “Elaboración de Banco
Didáctico de una Caja de Cambios Automática, para el Diagnóstico de
Elementos Eléctricos, Electrónicos y de Control para el Laboratorio de
Ingeniería Automotriz”, que, para aspirar al título de Ingeniero Automotriz
fue desarrollado por Diego Cabrera, bajo mi dirección y supervisión, en la
Facultad de Ciencias de la Ingeniería; y cumple con las condiciones
requeridas por el reglamento de Trabajos de Titulación artículos 18 y 25.
__________________________
Ing. Julio Cesar Leguisamo Milla
DIRECTOR DEL TRABAJO
C.I. 1711678795
DEDICATORIA
A mis padres, por su apoyo incondicional en todo momento, además de su
amor, cariño y esfuerzo.
A todos los profesores, quienes han sembrado conocimientos y valores en
mi formación como ser humano y profesional.
ÍNDICE DE CONTENIDOS
PÁGINA
ÍNDICE DE CONTENIDOS
i
ÍNDICE DE TABLAS
vi
ÍNDICE DE FIGURAS
vii
ÍNDICE DE ANEXOS
xi
RESUMEN
xii
ABSTRACT
xiii
1.
INTRODUCCIÓN
1
2.
MARCO TEÓRICO
5
2.1
TRANSMISIÓN AUTOMÁTICA
5
2.1.1
GENERALIDADES
5
2.1.2
ELEMENTOS CONTITUYENTES
6
2.1.3
CONVERTIDOR DE PAR
9
2.1.3.1
Alimentación de aceite para el convertidor de par
11
2.1.4
BOMBA DE ACEITE
12
2.1.5
TIPOS DE BOMBAS DE ACEITE
13
2.1.5.1
Bomba de rotor
13
2.1.5.2
Bombas de engranajes externos
13
2.1.5.3
Bomba de engranajes interiores
14
2.1.6
PALANCA DE MANDO
15
2.1.7
ENGRANAJE PLANETARIO
17
2.1.7.1
Relaciones de transmisión de un tren epicicloidal
2.1.7.2
Fórmulas para cuando uno de los piñones se encuentra
frenado
2.1.8
ELEMENTOS MECÁNICOS DE MANDO
2.1.8.1
Embragues
2.1.8.1.1 Embragues de la transmisión 4L60E
2.1.8.2
Frenos
18
20
20
20
21
22
i
2.1.8.2.1 Frenos de la transmisión 4L60E
2.1.8.3
Rueda libre
23
2.1.8.4
Rueda de aparcamiento
23
2.1.9
2.2
22
CAJA DE VÁLVULAS
24
FUNCIONAMIENTO HIDRÁULICO Y MECÁNICO DE LA
TRANSMISIÓN 4L60E
28
2.2.1
PARK
28
2.2.2
REVERSA
31
2.2.3
NEUTRAL
34
2.2.4
PRIMERA MARCHA
37
2.2.5
SEGUNDA MARCHA
40
2.2.6
TERCERA MARCHA
43
2.2.7
CUARTA MARCHA
46
2.3
FUNCIONAMIENTO ELECTRÓNICO DE LA TRANSMISIÓN
AUTOMÁTICA 4L60E
2.3.1
49
DESCRIPCIÓN DE LA TRANSMISIÓN AUTOMÁTICA
4L60E
49
2.3.2
CENTRALITA ELECTRÓNICA O MÓDULO
50
2.3.3
COMPONENTES ELÉCTRICOS
51
2.3.4
ENTRADAS Y SALIDAS EN EL CONTROL DEL CAMBIO
2.3.5
AUTOMÁTICO
52
SEÑALES DE ENTRADA
54
2.3.5.1
Sensor de velocidad del vehículo (VSS)
54
2.3.5.2
Conmutador de corta 4WD
55
2.3.5.3
Sensor de posición del acelerador (TPS)
55
2.3.5.4
Conjunto de conmutadores de marcha (PSA)
55
2.3.5.5
Sensor de temperatura del fluido de la transmisión (TFT) 58
2.3.5.6
Velocidad de entrada (Motor)
59
2.3.5.7
Sensor MAP
60
2.3.5.8
Sensor ECT
60
2.3.5.9
Interruptor de la señal de aire acondicionado (A / C)
60
2.3.5.10 Entrada del régimen de crucero
60
ii
2.3.5.11 Conmutador de freno
2.3.6
2.4
SEÑALES DE SALIDA
60
61
2.3.6.1
Solenoide del embrague del convertidor de par
62
2.3.6.2
Solenoide de control de presión
63
2.3.6.3
Solenoides de cambio 1-2 y 2-3
64
2.3.6.4
Solenoide de control 3-2
65
2.3.6.5
Solenoide PWM TCC
66
DELIMITACIÓN DE CONDICIONES DE FUNCIONAMIENTO DE
LA TRANSMISIÓN AUTOMÁTICA PARA EL DESARROLLO
DEL BANCO DIDÁCTICO
2.4.1
2.4.2
69
ANÁLISIS DE LOS PARÁMETROS PARA LA
ELABORACIÓN DEL BANCO DIDÁCTICO
69
SENSORES Y ACTUADORES
70
2.4.2.1
Rpm motor – Rpm salida
2.4.2.2
Sensor de temperatura del fluido de la transmisión (TFT) 73
2.4.2.3
Sensor de temperatura del motor (ECT)
74
2.4.2.4
Conmutador de freno
75
2.4.2.5
Conmutadores de marchas
75
2.4.2.6
Solenoide 1-2(A), 2-3 (B)
76
2.4.2.7
Solenoide de control 3-2
76
2.4.2.8
Solenoide de control de presión (PCS)
76
2.4.2.9
Solenoide TCC
77
2.4.2.10 Solenoide PWM TCC
2.4.3
79
ACCIONAMIENTO ELECTRÓNICO DE LA CAJA
AUTOMÁTICA
2.4.6
78
VALORES DE VOLTAJE AL QUE TRABAJAN LOS
ELEMENTOS
2.4.5
77
DIAGRAMA DEL CONTROL DE LA CAJA DE CAMBIOS
AUTOMÁTICA
2.4.4
71
80
ACCIONAMIENTO DE LA PARTE MECÁNICA DE LA CAJA
AUTOMÁTICA
81
iii
2.5
ELEMENTOS ELÉCTRICOS Y ELECTRÓNICOS UTILIZADOS
EN LA ELABORACION DEL BANCO DIDACTICO
2.5.1
LENGUAJE C
82
2.5.2
MICROCONTROLADOR
83
2.5.3
RESISTENCIAS
84
2.5.4
POTENCIÓMETROS
85
2.5.5
OSCILADOR
86
2.5.6
CAPACITORES
86
2.5.7
PANTALLA LCD
87
2.5.8
TRANSISTOR
88
2.5.8.1
Transistor Darlington
89
2.5.8.2
Transistor como interruptor
90
2.5.8.3
Transistor como amplificador
90
2.5.9
3.
82
RELÉ O RELEVADOR
91
2.5.10
LUZ PILOTO
92
2.5.11
SWITCH
92
2.5.12
DIODOS LED
93
METODOLOGÍA
3.1
DISEÑO Y ELABORACIÓN DEL BANCO DIDÁCTICO
3.1.1
94
94
3.1.1.1
Consideraciones preliminares
94
3.1.1.2
Materiales
96
3.1.1.3
Ensamblaje
97
3.1.2
3.2
PARTE MECÁNICA
94
PARTE ELECTRÓNICA
3.1.2.1
Diagrama de flujo del banco de pruebas
3.1.2.2
Elementos utilizados en la elaboración del banco
99
99
didáctico
100
3.1.2.3
Desarrollo del lenguaje de programación
101
3.1.2.4
Diseño en Proteus del banco didáctico
101
3.1.2.5
Diseño de la placa de impresión
104
BANCO DIDÁCTICO
3.2.1
FUNCIONABILIDAD Y MOVILIDAD
106
106
iv
3.2.2
PRUEBAS DE FUNCIONAMIENTO EN EL BANCO
DIDÁCTICO
3.2.3
MANUAL DE FUNCIONAMIENTO DEL BANCO
DIDÁCTICO
3.3
107
GUÍAS DE LABORATORIO
119
125
4.
ANÁLISIS DE RESULTADOS
141
5.
CONCLUSIONES Y RECOMENDACIONES
145
5.1
CONCLUSIONES:
145
5.2
RECOMENDACIONES:
146
GLOSARIO DE TÉRMINOS
147
BIBLIOGRAFÍA
148
ANEXOS
151
v
ÍNDICE DE TABLAS
PÁGINA
Tabla 1. Fórmulas de piñones frenados
20
Tabla 2. Conmutador de marchas – Activación
57
Tabla 3. Conmutador de marchas – Voltaje
57
Tabla 4. Estado de solenoides de cambio
65
Tabla 5. Rangos de Cambios en RPMs - 4L60E
70
Tabla 6. Rangos de RPMs Reales
72
Tabla 7. Rangos de RPMs a Simular
72
Tabla 8. Rangos de RPMs de Reversa
73
Tabla 9. Rangos de Temperatura del Sensor TFT
74
Tabla 10. Conmutador de Marchas
75
Tabla 11. Accionamiento de Solenoides de Cambio
76
Tabla 12. Voltajes de Trabajo del Control Electrónico
79
Tabla 13. Accionamiento Electrónico de la Transmisión
80
Tabla 14. Accionamiento Mecánica de la Transmisión
81
Tabla 15. Código de colores
85
Tabla 16. Elementos utilizados en la parte electrónica
100
vi
ÍNDICE DE FIGURAS
PÁGINA
Figura 1. Estructura de la Transmisión Automática
5
Figura 2. Partes de la Transmisión Automática
8
Figura 3. Partes del Convertidor de Par
9
Figura 4. Funcionamiento del Convertidor de Par
11
Figura 5. Alimentación de aceite al convertidor de par y radiador de
enfriamiento
12
Figura 6. Bomba de Rotor
13
Figura 7. Bomba de Engranajes Externos
14
Figura 8. Bomba de Engranajes Interiores.
15
Figura 9. Palanca de Mando
17
Figura 10. Tren Epicicloidal
17
Figura 11. Esquema y sección de un engranaje epicicloidal
19
Figura 12. Mecanismo de dos engranajes epicicloidales
19
Figura 13. Partes del embrague
21
Figura 14. Cinta de freno de caja de cambios
22
Figura 15. Rueda libre
23
Figura 16. Rueda de aparcamiento
24
Figura 17. Despiece del cuerpo de válvulas
26
Figura 18. Flujo de potencia – Park
29
Figura 19. Funcionamiento - Park
29
Figura 20. Circuito hidráulico - Park
30
Figura 21. Flujo de potencia - Reversa
32
Figura 22. Funcionamiento - Reversa
32
Figura 23. Circuito hidráulico - Reversa
33
Figura 24. Flujo de potencia – Neutral
35
Figura 25. Funcionamiento - Neutral
35
Figura 26. Circuito hidráulico - Neutral
36
Figura 27. Flujo de potencia - Primera
38
Figura 28. Funcionamiento - Primera
38
Figura 29. Circuito hidráulico – Primera
39
vii
Figura 30. Flujo de potencia - Segunda
41
Figura 31. Funcionamiento - Segunda
41
Figura 32. Circuito hidráulico - Segunda
42
Figura 33. Flujo de potencia - Tercera
44
Figura 34. Funcionamiento - Tercera
44
Figura 35. Circuito hidráulico - Tercera
45
Figura 36. Flujo de potencia - Cuarta
47
Figura 37. Funcionamiento – Cuarta
47
Figura 38. Circuito hidráulico - Cuarta
48
Figura 39. Módulo electrónico
50
Figura 40. Partes de la transmisión automática 4L60E
52
Figura 41. Esquema General de Control Electrónico - 4L60E
53
Figura 42. Sensor de velocidad
54
Figura 43. Conmutadores de marchas
56
Figura 44. Lógica de los switchs
58
Figura 45. Sensor TFT
59
Figura 46. Señales de salida de la transmisión
61
Figura 47. Solenoide TCC
63
Figura 48. Solenoide de control de presión
64
Figura 49. Solenoide de cambio 1-2, 2-3
65
Figura 50. Solenoide de control 3-2
66
Figura 51. Ciclos de trabajo del TCC PWM
68
Figura 52. Partes de la transmisión automatica 4L60E - Banco didáctico
69
Figura 53. Transmisión Automática - Entradas y Salidas
71
Figura 54. Ciclos de Trabajo TCC PWM
78
Figura 55. Esquema de la parte electrónica de la transmisión automática 78
Figura 56. Programación en lenguaje C
82
Figura 57. Microcontrolador
83
Figura 58. Símbolo de resistencia variable
85
Figura 59. Cristal
86
Figura 60. Capacitores
87
Figura 61. Pantalla LCD
88
viii
Figura 62. Transistor
89
Figura 63. Transistor darlington
89
Figura 64. Transistor como amplificador
90
Figura 65. Relés
91
Figura 66. Luz piloto
92
Figura 67. Switchs
93
Figura 68. Diodo led
93
Figura 69. Estructura Banco de Pruebas
94
Figura 70. Estructura, Vista Superior
95
Figura 71. Estructura, Vista Lateral
95
Figura 72. Estructura, Vista Frontal
96
Figura 73. Corte del Tubo para la Estructura
97
Figura 74. Soldada de la Estructura
98
Figura 75. Forrado con MDF de la Estructura
98
Figura 76. Instalación de elementos electrónicos
99
Figura 77. Programación en PIC C
101
Figura 78. Simulación en ISIS de Proteus
102
Figura 79. Simulacion en protoboard
103
Figura 80. Diagrama Final
104
Figura 81. Diseño del PCB - 18F452
105
Figura 82. Diseno de la PCB - Potencia
105
Figura 83. Diseño de la PCB - 18F4550
106
Figura 84. Circuito electrónico instalado
107
Figura 85. Inicio del banco didáctico
108
Figura 86. Prueba de variación de temperatura
108
Figura 87. Prueba de switch de encendido, palanca de cambios
109
Figura 88. Prueba switch de freno, rango 4 marcha 4
109
Figura 89. Prueba de variación de revoluciones
110
Figura 90. Rango 4 - marcha 1
110
Figura 91. Rango 4 - marcha 2
111
Figura 92. Rango 4 - marcha 3
111
Figura 93. Rango 4 - marcha 4
112
ix
Figura 94. Rango park y rango neutro
112
Figura 95. Rango reversa
113
Figura 96. Rango overdrive
113
Figura 97. Rango 3
114
Figura 98. Rango 2
114
Figura 99. Rango 1
115
Figura 100. Prueba multímetro - S(1-2)
115
Figura 101. Prueba multímetro - S(2-3)
116
Figura 102. Prueba multímetro - SC(3-2)
116
Figura 103. Prueba multímetro – PCS
117
Figura 104. Prueba multímetro - TCC
117
Figura 105. Prueba multímetro - Conmutador de marcha 1
118
Figura 106. Prueba multímetro - Conmutador de marcha 2
118
Figura 107. Prueba multímetro - Conmutador de marcha 3
119
Figura 108. Partes generales del banco didáctico
120
Figura 109. Parte posterior del banco didáctico
121
Figura 110. Partes del tablero de pruebas
121
Figura 111. Partes del tablero de control
122
Figura 112. Partes del tablero de observación
122
Figura 113. Switch de palanca de cambios
141
Figura 114. Potenciómetro industrial
142
Figura 115. Fuente de poder
143
Figura 116. Placa PCB 1
143
Figura 117. Placa PCB 2
144
Figura 118. Placa PCB 3
144
Figura 119. Suelda Smaw
151
Figura 120. Taladro DEWALT
152
Figura 121. Compresor Porten
153
Figura 122. Circuito impreso
174
Figura 123. Perforación de la placa
175
Figura 124. Colocación de los elementos en la placa
175
Figura 125. Soldada de los elementos en la placa
176
x
ÍNDICE DE ANEXOS
PÁGINA
Anexo I
151
Instrumentos utilizados para la elaboración de la estructura del
banco didáctico.
Anexo II
154
Programación del PIC 18F452.
Anexo III
168
Programación del PIC 18F4550
Anexo IV
174
Fabricación de la PCB.
Anexo V
176
Diagrama de flujo del funcionamiento de la electrónica de la caja
de cambios automática.
xi
RESUMEN
El avance a pasos agigantados de la tecnología ha impulsado a tener un
andar más confortable, seguridad y ahorro de combustible.
En la actualidad los automotores conjuntamente con partes mecánicas y
sistemas hidráulicos, llevan a bordo un módulo electrónico que controla las
diferentes partes de vehículo, un mecanismo implementado en los vehículos
sobre todo en los livianos ha sido la caja de cambios automática controlada
a través de un módulo electrónico (PCM) que toma en cuenta la forma de
conducción del vehículo.
El presente trabajo tiene como finalidad satisfacer las necesidades de
realizar prácticas sobre la caja de cambios automática que ha sido un tema
complejo de su entendimiento por falta de material didáctico donde apoyarse
para mejor comprensión del tema.
Los conocimientos obtenidos durante toda la carrera han servido de apoyo
para el desarrollo de este tema de tesis, como la materia en sí de
Transmisiones Automáticas, entre otras.
El banco didáctico se desarrolló sobre una estructura metálica previamente
diseñada de acuerdo a las necesidades presentadas, la estructura se forró
con MDF para una mejor apariencia, sobre esto se colocó el tablero de
control, tablero de pruebas y tablero de observación.
Con este banco se puede realizar pruebas de voltajes como los
accionamientos de los distintos elementos electrónicos existentes en una
caja de cambios automática, con la finalidad de que los estudiantes tengan
una visión clara de su funcionamiento.
xii
ABSTRACT
The advance in technology has driven of improvement the drivability of cars,
the fuel economy and safety.
Currently the motor together with of mechanical parts and hydraulic systems,
carried on board a electronic control system which controls the different parts
of vehicle, a mechanism implemented especially in the light vehicles is
electronic control system that commanded the automatic transmission which
takes into account the way of driving.
This work aims to meet the needs of do internships about the automatic
transmissions because that have been a complex topic of understand without
material, where do internships for better understanding of the theory taught
by teachers.
The knowledge gained throughout the progress has supported the
development of this topic, like matter itself on Automatic Transmissions.
The didactic panel developed previously on a metal structure designed
according to the needs presented, is the lining MDF for a better appearance
because in this structure is placed the boards as the control board, the test
board and the observation board.
With this panel was able to test the voltages of various existing electronics in
an electronically controlled automatic transmission. All of this in a general
environment in order for students to have a clear view of its operation.
xiii
1. INTRODUCCIÓN
La tecnología avanza a pasos agigantados, en seguridad, calidad, confort,
rendimiento, efectividad todo esto avalado por la industria automotriz. Así
mismo ha hecho con la caja de cambios automática, este
sistema de
transmisión que es capaz por sí mismo de seleccionar todas las marchas o
relaciones sin necesidad de la intervención directa del conductor. El cambio
de una relación a otra se produce en función tanto de la velocidad del
vehículo como del régimen de giro del motor, por lo que el conductor no
necesita el pedal de embrague.
El simple hecho de pisar el pedal del acelerador provoca cambio de relación
conforme el motor varía el régimen de giro. El resultado que aprecia el
conductor es el de un cambio cómodo que no produce tirones y le permite
prestar toda su atención a la conducción. Por lo tanto el cambio automático
no sólo proporciona más confort, sino que aporta al vehículo mayor
seguridad activa.
El tipo predominante de la caja de cambios automática es la que funciona
hidráulicamente, usando un convertidor de par y un conjunto de engranajes
planetarios para proporcionar una multiplicación del par.
El convertidor de par consta de una bomba que lanza el aceite hidráulico y
una turbina que lo recibe. La bomba lanza el fluido con una determinada
fuerza y la turbina recibe de la bomba gran parte de la fuerza mecánica del
mismo, alrededor de un 90%, siendo ese porcentaje incluso del 100%
cuando el convertidor dispone de un embrague de convertidor o puenteo
hidromecánico.
Los elementos fundamentales que componen la mayoría de los cambios
automáticos actuales son: el primer elemento es el convertidor hidráulico de
par que varía y ajusta de forma automática su par de salida al par que
necesita la transmisión, el segundo elemento es el tren epicicloidal o una
combinación de ellos que establecen las distintas relaciones del cambio, el
tercer
elemento
es
el
mecanismo
de
mando
que
selecciona
automáticamente las relaciones de los trenes epicicloidales, este sistema de
1
mando puede ser tanto mecánico como hidráulico, electrónico o una
combinación de ellos.
Precisamente el control electrónico es la mayor innovación que disponen los
cambios automáticos actuales dando al conductor la posibilidad de elegir
entre varios programas de conducción (económico, deportivo, invierno)
mediante una palanca de selección, llegando actualmente a existir sistemas
de control que pueden seleccionar automáticamente el programa de cambio
de marchas más idóneo a cada situación concreta de conducción.
El módulo de control del tren de potencia (PCM) es la computadora que
funciona como el cerebro de la caja de cambios automática controlada
electrónicamente. El PCM recibe entradas electrónicas de varios sensores
del vehículo y procesa esta información para determinar las condiciones de
operación del vehículo.
Dependiendo de ciertas condiciones de operación el PCM controla: los
cambios ascendentes y descendentes operando un par de solenoides de
cambios en una secuencia ON/OFF, así mismo controla la calidad de cambio
de la transmisión automática accionando electrónicamente al solenoide de
control de presión (PCS) el cual ajusta la presión de línea, otro aspecto que
controla es el tiempo de aplicación y liberación del embrague del convertidor
de par a través del solenoide del embrague del convertidor de par (TCC).
El control electrónico de operación de la caja de cambio automática
proporciona
calidad,
puntos
de
cambios
consistentes
y
precisos,
dependiendo de las condiciones de operación del vehículo.
En
el
sistema
electrónico
encontramos
un
sinnúmero
de
partes
indispensables que controla la caja d cambios como sensores, PCM y caja
de solenoides.
2
La presente investigación tiene como objetivo principal elaborar un banco
didáctico de una caja de cambios automática, para el diagnóstico de los
elementos eléctricos, electrónicos y de control. La realización de este trabajo
tiene como finalidad que el taller de Ingeniería Automotriz cuente con el
material adecuado y brinde a los estudiantes una correcta capacitación
respecto al tema.
La elaboración del material didáctico es indispensable para la realización de
prácticas de estudiantes en el taller, debido a la necesidad y actualmente la
implementación en muchas versiones de vehículos con lo que se ha visto
pertinente tener materiales que faciliten el entendimiento de este tipo de
mecanismos, por medio de la simulación y además de realizar el diagnóstico
de los elementos eléctricos, electrónicos y control de una caja de cambios
automática se logrará en los estudiantes una correcta comprensión de la
parte teórica impartida por los docentes, y
así el taller de Ingeniería
Automotriz contará con material didáctico para servicio de la comunidad
universitaria.
La teoría combinada con la práctica afianzan el aprendizaje impartido por los
docentes en las aulas, la información escrita que se redacta es de vital
importancia para este tema que es conocido por los estudiantes pero un
poco confuso cuando no se tiene fuentes de información claras y precisas.
En el trabajo se utiliza el método analítico y práctico, para tener claro el
funcionamiento de todo el conjunto porque se necesitan todas las
condiciones de funcionamiento, por otra parte ya claro el funcionamiento se
procede a pasar a la práctica plasmando la información en un banco
didáctico funcional.
La investigación realizada se desarrolló mediante revisión bibliográfica en
libros, manuales técnicos e internet para la elaboración del banco didáctico.
3
En las diferentes secciones de este trabajo se muestra la teoría del
funcionamiento de todo el control electrónico de una caja de cambios
automática, además de la metodología para la elaboración del banco
didáctico en la que se puede realizar prácticas para tener una mayor
compresión del tema.
El banco didáctico consta de las partes principales de la electrónica de una
caja de cambios automática, en la cual se puede realizar prácticas y analizar
el funcionamiento real, el objetivo es contar con este tipo de materiales
didácticos que nos ayudan al desarrollo practico de los estudiantes además
de la teoría impartida en clase por los docentes.
4
2. MARCO TEÓRICO
2.1
TRANSMISIÓN AUTOMÁTICA
2.1.1 GENERALIDADES
Para transformar el par y obtener las distintas velocidades, este tipo de cajas
trabajan con trenes epicicloidales, el cambio de marchas se logra aplicando
frenos y embragues dependiendo de la velocidad informada a la PCM.
Estas cajas de cambios utilizan el convertidor de par como el embrague de
acoplamiento entre el motor y el eje de entrada a la transmisión. El cambio
de las respectivas velocidades se logra mediante el control electrónico lo
cual consiste en sensores que controlan el andar del vehículo y envían la
información a la PCM, de esta manera se controla los actuadores que
comanda el circuito hidráulico tanto de frenos como de los embragues
alojados en el interior de la caja, en la figura 1 se observa la estructura de la
de este tipo de caja de cambios. (Valbuena Rodríguez y Oscar, 2008).
Figura 1. Estructura de la Transmisión Automática
(José Manuel, 2001)
5
El cambio automático combina los circuitos electrónicos, hidráulicos y
mecánicos, la combinación de estos da como resultado las distintas
velocidades de la transmisión.
El circuito electrónico se compone de distintos sensores (sensor de
temperatura del motor, sensor de temperatura del fluido de transmisión,
sensor de velocidad de entrada y de salida, apertura de la aleta de
aceleración entre otras señales). La PCM recibe las señales que son
procesadas para activar con señales eléctricas las electroválvulas de los
circuitos hidráulicos, que a su vez, accionan los frenos y los embragues.
El circuito hidráulico dispone de todos los elementos de un circuito (bomba
de presión, electroválvulas, válvulas limitadoras de presión, cilindros
actuadores, acumuladores, entre otros), este circuito se encarga de lubricar
todas las partes móviles de la caja y mandar el caudal de aceite que
necesita el convertidor de par, además, actúa sobre los embragues de los
trenes epicicloidales y los frenos.
El conjunto mecánico es el encargado de transmitir y transformar el par
motor. Consta de trenes epicicloidales, rodamientos, frenos y embragues de
discos y cinta bañados en aceite, ruedas libres. (Ferrer J. y Domínguez, 2008).
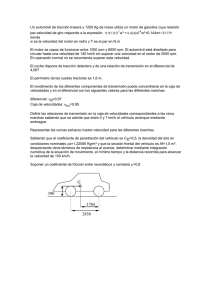
2.1.2 ELEMENTOS CONTITUYENTES
La transmisión automática tiene la misma función que la transmisión manual,
proveer alto torque y poca velocidad en la partida, y alta velocidad para
desplazamiento en carretera. Las diferencias es que la transmisión manual
depende del conductor para apretar el embrague y mover una palanca.
El cambio automático es un sistema de transmisión que es capaz por sí
mismo de seleccionar todas las marchas o relaciones sin la necesidad de la
intervención directa del conductor. El cambio de una relación a otra se
produce en función tanto de la velocidad del vehículo como del régimen de
giro del motor, por lo que el conductor no necesita ni de pedal de embrague
ni de palanca de cambios. El simple hecho de pisar el pedal del acelerador
6
provoca el cambio de relación conforme el motor varía de régimen de giro.
(Aficionados a la mecanica, 2013).
La transmisión automática depende de válvulas o sensores electrónicos
combinados con una computadora para identificar el momento y programar
el cambio. En ese momento, los embragues y bandas internas se deslizan y
los pistones empujan discos dentro de un juego de engranajes planetarios
para cambiar la relación de torque y velocidad. (Widman, 2007).
En los autos con caja de cambios manual el embrague es mecánico y se
acciona mediante un pedal que hace que el eje motor y transmisión se
desconecten. En los automóviles que poseen transmisión automática la
operación de embrague es hidráulica.
Las partes de una caja de cambios automática de GM, HYDRA-MATIC
4L60E, se muestran en la figura 2.
7
23
1
22
2
3
21
4
20 19 18 17 16 15 14
5
6
7
8
9
13
12
10
11
Figura 2. Partes de la Transmisión Automática
(General Motors, 1992)
8
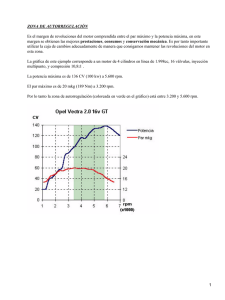
2.1.3 CONVERTIDOR DE PAR
Es el elemento fundamental de una caja de cambios automática, este tipo de
dispositivo sirve para amplificar el par de entrada a cambio de reducir la
velocidad.
El convertidor de par es un embrague hidráulico que basa su funcionamiento
en la transformación de energía mecánica en hidráulica y viceversa.
El convertidor consta de tres elementos que forman un solo cuerpo, en cuyo
interior está el aceite en la figura 3 se observa las partes del convertidor de
par:
Figura 3. Partes del Convertidor de Par
(José Manuel, 2001)
El impulsor o bomba va unido al motor, con forma de disco y unas
acanaladuras interiores en forma de aspa para dirigir el aceite
La turbina, tiene una forma similar y va unida al cambio de marchas
El reactor o estator, está en el interior y también es acoplado al
cambio de marchas.
(José Manuel, 2001).
9
Cuando el automóvil está parado, las dos mitades principales del convertidor
giran independientes. Pero al empezar a acelerar, la corriente de aceite se
hace cada vez más fuerte, hasta el punto de que el impulsor y la turbina es
decir, motor y cambio, giran solidarios arrastrados por el aceite.
(Universidad Catolica del Norte, s.f.)
Al girar la bomba accionada directamente por el movimiento del cigüeñal, el
aceite se impulsa hasta la turbina. A la salida de ésta el aceite tropieza con
los alabes del reactor que tienen una curvatura opuesta a los de las ruedas
de bomba y turbina. Esta corriente de aceite empuja al reactor en un giro de
sentido contrario al de la bomba y la turbina y como está diseñado para no
poder realizar ese giro, esta reacción se transmite a través del aceite sobre
la Bomba y este a su vez es transmitido de nuevo sobre la turbina.
(Aficionados a la mecanica, 2013).
Cuanto mayor sea la diferencia de giro entre turbina y bomba mayor será la
diferencia de par entre la entrada y la salida del convertidor, conforme
disminuye la diferencia de velocidad va disminuyendo la desviación de la
corriente de aceite y por lo tanto el empuje adicional sobre la turbina con lo
que la relación de par entre salida y entrada va disminuyendo
progresivamente.
Cuando las velocidades de giro de turbina e impulsor se igualan, el reactor
gira incluso en su mismo sentido sin producirse ningún empuje adicional de
forma que la transmisión de par no se ve aumentada comportándose el
convertidor como un embrague hidráulico convencional, el funcionamiento se
muestra en la figura 4. (Aficionados a la mecanica, 2013).
10
Figura 4. Funcionamiento del Convertidor de Par
(José Manuel, 2001)
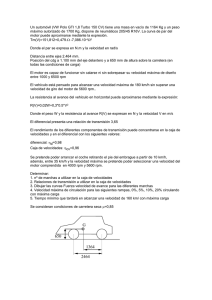
2.1.3.1
Alimentación de aceite para el convertidor de par
La alimentación de aceite del convertidor de par se realiza continuamente a
través de un circuito hidráulico alimentado por una bomba de engranajes.
Este circuito refrigera el aceite a través de un intercambiador de calor
refrigerante-aceite, como se muestra en la Figura 5.
La presión hidráulica se controla por unas electroválvulas, a través de la
unidad de control del cambio que gestionan el embrague anulador y el
convertidor de par. (Ferrer J. y Domínguez, 2008).
Para la regulación se recurre a los siguientes parámetros:
Régimen y par del motor
Régimen de la turbina
Régimen de salida
Temperatura
Régimen de marcha
11
Figura 5. Alimentación de aceite al convertidor de par y radiador de
enfriamiento
(Ferrer J. y Domínguez, 2008)
2.1.4 BOMBA DE ACEITE
Es la encargada de hacer circular el aceite por el interior de la caja de
cambios y el convertidor de par. Lubrica y realiza el control de los elementos
que intervienen en los cambios.
La bomba más utilizada es la de caudal constante con engranes rectos, la
cual dispone de una rueda con dentado interior, y otra, con dentado exterior,
con una leva separadora entre las dos.
Es accionada a través de un elemento de arrastre desde el convertidor y gira
siempre que el motor esté en marcha. En su trabajo, los engranajes
provocan una succión en el lado de entrada de la bomba, la cuando extrae el
aceite desde el colector y lo aceite circular por el interior de la bomba, el
aceite presurizado retorna hacia la salida de la bomba y es controlado por la
12
válvula reguladora de presión que se localiza en la centralita hidráulica.
(Ferrer J. y Domínguez, 2008).
2.1.5 TIPOS DE BOMBAS DE ACEITE
Existen diferentes tipos de bombas que varían en su estructura y
composición. Las construcciones más frecuentes son:
2.1.5.1
Bomba de rotor
Esta bomba de rotor se compone de un cuerpo de bomba, rotor exterior,
rotor excéntrico, entrada y salida de aceite, el rotor exterior es arrastrado por
el rotor excéntrico el cual recibe el movimiento de un eje exterior, en cada
vuelta el rotor interior le va ganando un hueco al exterior que es donde se
comprime el aceite. Con este tipo de construcción se logra la generación de
presiones altas con elevado caudal, en la figura 6 se ve este tipo de bomba.
(Ceac, 2003).
Figura 6. Bomba de Rotor
(Ceac, 2003)
2.1.5.2
Bombas de engranajes externos
La rotación de los dos engranajes, situados entre los dientes y la pared,
transportan el aceite. Cuando los dientes del par de engranajes entran unos
13
en otros, éstos impiden que el aceite vuelva al cárter, como se muestra en la
figura 7. (Universidad Tecnológica del Perú, s.f.).
Figura 7. Bomba de Engranajes Externos
(Ceac, 2003)
2.1.5.3
Bomba de engranajes interiores
Este tipo de bombas se utiliza en elementos que no necesitan de altas
presiones. En las bombas de engranajes interiores, el rotor es una corona,
mientras que el piñón es la parte que se desplaza. Esto asegura el cierre de
las cámaras de trabajo en donde se genera una succión del líquido
lubricante, en la figura 8 se puede observar este tipo de bomba.
(QuimiNet, 2008 ).
14
Figura 8. Bomba de Engranajes Interiores.
(Ceac, 2003)
2.1.6 PALANCA DE MANDO
Las transmisiones automáticas suponen la desaparición del pedal del
embrague, pero no de la palanca de cambio, si bien ésta tendrá otro tipo de
función, como se muestra en la figura 9.
Las posiciones que puede ocupar la palanca son:
P (aparcamiento y posición de arranque): En esta posición, la rueda
de aparcamiento se encarga de enclavar el eje de salida del
movimiento. Es equivalente al freno de mano de las transmisiones
manuales: sólo se emplea con el vehículo totalmente parado, para
evitar que se desplace, y permite accionar el motor de arranque.
R (marcha atrás): En cuanto se accione el acelerador el coche
empezará a desplazarse hacia atrás, por lo que esta posición está
bloqueada para velocidades superiores a los 10 km/h hacia adelante.
15
N (punto muerto y posición de arranque): El posible movimiento del
motor no se transmite a las ruedas.
D (directa): En cuanto se selecciona esta posición la caja de
velocidades queda en posición de primera velocidad. Al accionar el
acelerador y comenzar la marcha es la propia caja la que gestiona los
cambios necesarios en la relación de marchas. Puede ser
seleccionada tanto a vehículo parado como en marcha.
2 ó S (segunda impuesta): En esta posición el cambio es también
automático, pero nunca se pasa de segunda, por lo que resulta útil en
circulación por montaña. Puede seleccionarse tanto en marcha, si se
circula en posición D y con la tercera engranada el cambio a la
posición 2 sólo será posible por debajo de cierta velocidad del motor.
1 ó L (primera impuesta): En esta posición sólo está disponible la
primera velocidad, y no está disponible a velocidades superiores a los
50 km/h. Las posiciones P, R y 1 requieren el desbloqueo de un
seguro que evita que sean seleccionadas durante la marcha
accidentalmente. (José Manuel, 2001).
Cuando la palanca de mando está en alguna de las posiciones automáticas,
los cambios de velocidad se producen con arreglo a tres factores: la
velocidad del vehículo, la posición de la palanca selectora y la solicitación
del acelerador o régimen del motor.
Al pisar a fondo el acelerador se consigue mayor rendimiento de cada
velocidad, mientras que si se acelera parcialmente, el cambio de relación se
produce a un régimen del motor bastante más bajo. (José Manuel, 2001).
16
Figura 9. Palanca de Mando
(Ceac, 2003)
2.1.7 ENGRANAJE PLANETARIO
También llamado tren epicicloidal, son utilizados por las cajas de cambio
automáticas. Estos engranajes están accionados mediante sistemas de
mando normalmente hidráulicos o electrónicos que accionan frenos y
embragues que controlan los movimientos de los distintos elementos de los
engranajes, poseen tres componentes el planeta, porta satélites y la corona,
como se muestra en la figura 10.(Thomson, 1985).
Figura 10. Tren Epicicloidal
(José Manuel, 2001)
17
C: corona
P: piñón planetario
PS: porta satélites
S: satélite
2.1.7.1
Relaciones de transmisión de un tren epicicloidal
Para poder calcular las velocidades de salida y las relaciones de transmisión
se debe tomar en cuenta el número de dientes del planetario y el número de
dientes interiores de la corona. La fórmula de Willys relaciona las
velocidades y el número de dientes de los elementos, así:
Dónde:
Estos tres componentes (planeta, satélites y corona) del tren epicicloidal
pueden moverse libremente sin transmitir movimiento alguno, pero si se
bloquea
uno
de
los
componentes,
los
restantes
pueden
girar,
transmitiéndose el movimiento con la relación de transmisión resultante
según la relación existente entre sus piñones. Si se bloquean dos de los
componentes, el conjunto queda bloqueado, moviéndose todo el sistema a la
velocidad de rotación recibida por el motor, en la figura 11 y figura 12 se
muestra el esquema del tren epicicloidal. (Ferrer J. y Domínguez, 2008).
18
Figura 11. Esquema y sección de un engranaje epicicloidal
(Ceac, 2003)
Figura 12. Mecanismo de dos engranajes epicicloidales
(Transpart S.A., s.f.)
19
2.1.7.2
Fórmulas para cuando uno de los piñones se encuentra
frenado
Tabla 1. Fórmulas de piñones frenados
TREN EPICICLOIDAL
3
FIJO
ENTRADA
SALIDA
1
3
2
1
2
3
RELACION DE TRANSMISIÓN
1
𝑅 =
1+ 1
1
2
𝑅 =1+
1
𝑅 =1+
2
2
2
1
3
𝑅 =
Enganaje Principal = 1
2
3
1
3
1
1+
2
𝑅 = −
Planetarios = 3
3
2
1
1
1
𝑅 = −
Corona = 2
2
2
1
2
1
1
2
(Ferrer J. y Domínguez, 2008)
2.1.8 ELEMENTOS MECÁNICOS DE MANDO
Son las partes necesarias para la relación de velocidades que ofrece el
mecanismo de una caja automática. Son los elementos principales.
2.1.8.1
Embragues
Se emplean embragues multidisco en baño de aceite, accionados por un
circuito hidráulico.
20
Consiste en una serie de placas la mitad de las cuales están fijadas en el
anillo exterior, llamado tambor de embrague que tiene la misión de enlazar
rígidamente dos componentes de los trenes planetarios, para lograr una
determinada relación de marcha, como se muestra en la figura 13.
(Brejcha M, 1978).
Figura 13. Partes del embrague
(Ceac, 2003)
2.1.8.1.1
Embragues de la transmisión 4L60E
Embrague de rodillos del estator.
Embrague de corta inversa.
Embrague 3-4.
Conjunto de embragues de cuñas de avance.
21
Conjunto de embragues de rodillos de corta.
Embrague de avance.
Embrague de sobre-aceleración.
Embrague de entrada inversa.
(General Motors, 1992).
2.1.8.2
Frenos
La única diferencia entre frenos y embragues es que unos de los discos no
giran con el eje de entrada a la caja, sino que está fijados a la carcasa. Por
lo demás la tecnología y el concepto de funcionamiento son los mismos.
También pueden encontrarse frenos que emplean para detener el elemento
giratorio la fricción de una cinta que lo rodea como en la figura 14 en donde
A es el elemento a frenar y B es la cinta de freno. (José Manuel, 2001).
Figura 14. Cinta de freno de caja de cambios
(José Manuel, 2001)
2.1.8.2.1
Frenos de la transmisión 4L60E
Conjunto de cinta de freno 2-4.
(General Motors, 1992).
22
2.1.8.3
Rueda libre
Se trata de un dispositivo que actúa sobre algún elemento del tren
impidiendo su giro en uno de los sentidos, también es conocido como
embrague de patín.
El elemento fijo A es una corona solidaria a la carcasa del cambio, mientras
que la corona D está vinculada al porta satélites, como se muestra en la
figura 15. La rotación anti horaria comprime los muelles al arrastrar los
rodillos B. La rotación horaria arrastra los rodillos hacia el otro lado, en el
cual quedan acuñados y sin posibilidad de giro. Por tanto, la corona D
tampoco puede girar y la transmisión no gira. (José Manuel, 2001).
Figura 15. Rueda libre
(José Manuel, 2001)
2.1.8.4
Rueda de aparcamiento
Se trata de un mecanismo de enclavamiento que se emplea para estacionar
el vehículo impidiendo cualquier movimiento de éste.
La rueda de aparcamiento es una corona dentada instalada en el árbol de
salida, entre cuyos dientes puede encajarse el dedo de aparcamiento como
se muestra en la figura 16. Si al seleccionar la posición “P” el dedo no
consigue encajar en algún hueco de la rueda de aparcamiento el vehículo no
estará bloqueado y podrá desplazarse, sin embargo, en cuanto lo haga, la
23
rueda de aparcamiento girará y un muelle que actúa sobre el dedo hará
efectivo el bloqueo. (José Manuel, 2001).
Figura 16. Rueda de aparcamiento
(José Manuel, 2001)
2.1.9 CAJA DE VÁLVULAS
Es el mecanismo que gestiona el control hidráulico de la caja de cambios.
Formado de un cuerpo de aluminio fundido con canalizaciones hidráulicas
que unen diferentes electroválvulas, como se observa en la figura 17. El
conjunto permite anclar las electroválvulas y la válvula de accionamiento
manual. Los distintos elementos que dispone dependen del tipo y modelo de
la caja.
(Ceac, 2003).
24
Consta principalmente de:
Válvula reguladora de presión
Válvulas de cambio con solenoide y muelle
Válvulas de accionamiento manual sincronizada con la palanca
selectora
Válvula del convertidor
Válvula del embrague del convertidor
Válvula de bloqueo
Amortiguador del embrague trasero
Amortiguador del freno de marcha hacia atrás
Válvula del freno de la rueda libre del planeta
Válvula de paso de primera a segunda
Válvula de paso de segunda a tercera
Amortiguador del freno de la rueda libre del planeta
Válvula del freno de marcha atrás
Válvula del embrague trasero
Válvula de bloqueo de segunda a primera
Válvula de selección manual
Válvula moduladora
Válvula de retromando
25
Figura 17. Despiece del cuerpo de válvulas
(Ceac, 2003)
Las válvulas de la transmisión automática son de corredera y son
accionadas por solenoides controlados por el módulo del cambio.
El control electrónico controla el mando hidráulico por medio de la unidad de
control PCM.
A través de sensores, se determina las revoluciones del motor, las
revoluciones de salida, la carga del motor. También, se registra la posición
de la palanca selectora, el selector de programa, enviándose todos estos
datos a la unidad electrónica de control, en forma de magnitudes eléctricas.
(Ceac, 2003).
El control electrónico puede asumir cinco funciones:
26
Control del punto de cambio de marcha: La selección de marcha
se realiza en forma automática, dependiendo de la velocidad tanto de
entrada como de salida y de la carga del motor. La selección de
marchas se realiza por medio de 2 actuadores.
Control de la presión de modulación: Depende de la señal de
carga, la presión de modulación actúa por medio de un regulador
electrohidráulico de presión, sobre la presión principal y
el
accionamiento de los embragues. Su intervención es decisiva para la
calidad del cambio de marchas.
Control del convertidor de par: En tercera como en cuarta se
produce un puente mecánico directo desde el convertidor de par, lo
que permite suprimir las pérdidas hidráulicas en este último. El
embrague es controlado mediante un actuador conocido como el
TCC, dependiendo de diversas condiciones.
Intervención en el encendido: Dependiendo de la carga y del
régimen de revoluciones del motor, se consigue, durante el proceso
del cambio de marchas, una reducción del par motor por retraso del
momento de encendido. Esto permite un mayor confort en el cambio
de marchas y una reducción de la fricción del embrague, lo que
prolonga la vida de los elementos de fricción.
Circuitos de seguridad: El sistema comprende dispositivos de
bloqueo que impiden introducir la marcha atrás a velocidades
superiores a 8 km/h, así como a marchas más bajas viajando a
velocidades excesivas. En caso de avería, el sistema se desconecta,
y la caja de cambios pasa a un estado de servicio de seguridad con
características de funcionamiento de emergencia. En caso de avería
se enciende un indicador.
(Ceac, 2003).
27
2.2
FUNCIONAMIENTO HIDRÁULICO Y MECÁNICO DE LA
TRANSMISIÓN 4L60E
La 4L60-E transmisión automática Hydra-Matic requiere un suministro
constante de fluido a presión para enfriar y lubricar los componentes en toda
la unidad. También requiere que se aplique una fuerza de sujeción de las
bandas y embragues para obtener las diferentes gamas de marcha. La
bomba de aceite y los conjuntos de cuerpo de la válvula proporcionan para
esta presurización y distribución de fluido. (General Motors, 1992).
2.2.1 PARK
El conjunto de convertidor de par está conectado al motor a través del
volante del motor y gira a la velocidad del motor.
El rotor de la bomba de aceite es accionado a la velocidad del motor.
Los discos de embrague de corta inversa se aplican y mantienen el
soporte de reacción fija a la caja de transmisión.
Con el flujo de potencia terminado en la carcasa del embrague de
corta inversa no tiene ningún efecto sobre la operación de transmisión
en Park.
La válvula manual están en la posición de estacionamiento (P). El
bloqueo de estacionamiento se acopla con el freno de trinquete con el
engranaje interno de reacción.
La válvula manual se acciona al colocar la palanca de mando en
rango de Park.
En el cuerpo de válvulas el fluido acciona el embrague de cortainversa, la presión en el sistema se mantiene a máxima presión y esto
es controlado por el solenoide de control de presión.
En la figura 18, figura 19 y figura 20 se muestra el funcionamiento
mecánico e hidráulico del rango Park.
(General Motors, 1992).
28
Figura 18. Flujo de potencia – Park
(General Motors, 1992)
Figura 19. Funcionamiento - Park
(General Motors, 1992)
29
Figura 20. Circuito hidráulico - Park
(General Motors, 1992)
30
2.2.2 REVERSA
En marcha reversa (R), el par del motor se transmite desde el eje de la
turbina y la caja de entrada de la misma manera como en Park. El embrague
de entrada inversa se aplica. (General Motors, 1992).
El trinquete de estacionamiento se desacopla y el eje de salida es
libre de girar.
Todos los embragues en la caja de entrada se liberan.
Embrague de entrada inversa se aplica.
Embrague de corta inversa aplicado.
El engranaje interno de reacción acciona el eje de salida en sentido
antihorario para obtener inversa y una relación de transmisión de
aproximadamente 2,3:1.
La válvula manual se acciona al colocar la palanca de mando el rango
de Reversa.
En el cuerpo de válvulas se dirige el fluido de la trasmisión hacia el
embrague de entrada inversa para que el vehículo entre en reversa.
El sistema se mantiene a máxima presión y esto es controlado por el
solenoide de control de presión que recibe un voltaje de alimentación
desde la PCM de 2 volts.
En la figura 21, figura 22 y figura 23 se muestra el funcionamiento
mecánico e hidráulico del rango Reversa.
(General Motors, 1992).
31
Figura 21. Flujo de potencia - Reversa
(General Motors, 1992)
Figura 22. Funcionamiento - Reversa
(General Motors, 1992)
32
Figura 23. Circuito hidráulico - Reversa
(General Motors, 1992)
33
2.2.3 NEUTRAL
El flujo de potencia en Neutral es el mismo que en el rango de Park.
El conjunto de la caja de entrada y el eje de la turbina son impulsados
a la velocidad de la turbina del convertidor.
Todos los conjuntos de embrague en el conjunto de la carcasa de
entrada se liberan y el flujo de energía se termina en la carcasa de
entrada.
Embrague de corta inversa liberado.
Trinquete de parking desactivado.
El engranaje interno de reacción y el eje de salida pueden girar
libremente. Esto permite que el vehículo ruede libremente cuando la
transmisión está en punto muerto.
Rango de neutro se puede seleccionar para arrancar el motor cuando
el vehículo está parado o en movimiento en el camino.
La válvula manual se acciona al colocar la palanca de mando en
rango Neutral.
El fluido en el cuerpo de válvulas no activa ningún mecanismo, se
mantiene lubricando al sistema.
El sistema se mantiene a máxima presión y esto es controlado por el
solenoide de control de presión que recibe un voltaje de alimentación
desde la PCM de 2 volts.
En la figura 24, figura 25 y figura 26 se muestra el funcionamiento
mecánico e hidráulico del rango Neutral.
(General Motors, 1992).
34
Figura 24. Flujo de potencia – Neutral
(General Motors, 1992)
Figura 25. Funcionamiento - Neutral
(General Motors, 1992)
35
Figura 26. Circuito hidráulico - Neutral
(General Motors, 1992)
36
2.2.4 PRIMERA MARCHA
En la primera marcha, el par del motor se multiplica a través del convertidor
de par y los trenes epicicloidales de la transmisión del vehículo. Los
engranajes planetarios operan en la reducción para la primera marcha con
relación de transmisión de aproximadamente 3.06:1. (General Motors, 1992).
El par motor se transfiere desde el convertidor de par para el conjunto
de la caja de entrada en la misma manera que durante Park, Reversa
y Neutral.
El embrague de marcha adelante se aplica en todos los rangos de
marcha hacia delante, luego pasa el movimiento al embrague de
patín.
El embrague de rodillo de corta impide rotar el conjunto en sentido
antihorario y se evita que la corona del primer tren entre en
movimiento
El porta satélites de entrada, al estar estacionaria su corona hace
girar el conjunto de soporte de entrada que se conecta al eje de salida
en sentido horario.
Como resultado también giran otros elementos pero no afectan el flujo
de potencia mecánica de la transmisión.
La válvula manual se acciona al colocar la palanca de mando el rango
Drive y en primera marcha.
El fluido de aceite se dirige hacia los respectivos solenoides de
cambio los cuales en la combinación adecuada permite que se
accione el embrague de avance para obtener la primera marcha.
El sistema se mantiene a máxima presión y esto es controlado por el
solenoide de control de presión que recibe un voltaje de alimentación
desde la PCM de 2 volts.
En la figura 27, figura 28 y figura 29 se muestra el funcionamiento
mecánico e hidráulico de la marcha Primera.
(General Motors, 1992).
37
Figura 27. Flujo de potencia - Primera
(General Motors, 1992)
Figura 28. Funcionamiento - Primera
(General Motors, 1992)
38
Figura 29. Circuito hidráulico – Primera
(General Motors, 1992)
39
2.2.5 SEGUNDA MARCHA
Las señales de entrada de los diversos sensores del motor y de transmisión
de información se supervisan continuamente por el módulo de control del
tren motriz (PCM). A medida que aumenta la velocidad del vehículo, el PCM
procesa esta información para determinar el momento preciso para poner la
transmisión en la segunda marcha. En segunda, los conjuntos de engranajes
planetarios
operan
para
obtener
una
relación
de
transmisión
de
aproximadamente 1,63:1. (General Motors, 1992).
Se acciona el embrague de marcha adelante, luego se aplica el
embrague de cuña hacia adelante que transfiere el par motor al sol de
reacción de entrada y al porta satélites de entrada.
Cinta de freno 2-4 aplicada.
La corona de entrada conduce el porta satélites de entrada, portador
de reacción de entrada y el eje de salida en una segunda reducción.
La válvula manual se acciona al colocar la palanca de mando el rango
Drive y dependiendo de las condiciones pasa a segunda marcha.
El fluido de aceite se dirige hacia los respectivos solenoides de
cambio los cuales en la combinación adecuada permite que se
accione el embrague de avance y la cinta de freno 2-4, para obtener
la segunda marcha.
El sistema se mantiene a máxima presión y esto es controlado por el
solenoide de control de presión que recibe un voltaje de alimentación
desde la PCM de 2 volts.
En la figura 30, figura 31 y figura 32 se muestra el funcionamiento
mecánico e hidráulico de la marcha Segunda.
(General Motors, 1992).
40
Figura 30. Flujo de potencia - Segunda
(General Motors, 1992)
Figura 31. Funcionamiento - Segunda
(General Motors, 1992)
41
Figura 32. Circuito hidráulico - Segunda
(General Motors, 1992)
42
2.2.6 TERCERA MARCHA
Cuando la velocidad del vehículo aumenta más, el PCM controla los diversos
sensores de información para determinar el momento preciso para poner la
transmisión en Tercera velocidad. En esta marcha ambos juegos de
engranes planetarios, de entrada y de reacción, giran a la misma velocidad y
ofrecen una relación de transmisión directa de 1:1 entre la turbina del
convertidor y el eje de salida. (General Motors, 1992).
El embrague de marcha adelante se aplica, el embrague de cuña
hacia adelante está impulsando el sol de entrada.
Cinta de freno 2-4 liberada.
Embrague 3-4 aplicado.
Tanto la corona de entrada y el engranaje solar de entrada son
accionados a la misma velocidad. El porta satélites de entrada
impulsan el conjunto de soporte de entrada que acciona el eje de
salida a la velocidad de la turbina del convertidor para el
accionamiento directo de tercera marcha.
Todo el conjunto de engranajes gira como una unidad a la velocidad
de turbina del convertidor.
La válvula manual se acciona al colocar la palanca de mando en
rango Drive y dependiendo de las condiciones pasa a tercera marcha.
El fluido de aceite se dirige hacia los respectivos solenoides de
cambio los cuales en la combinación adecuada permite que se
accione el embrague de avance, accione el embrague 3-4 y libera la
cinta de freno 2-4, para obtener la tercera marcha.
El sistema se mantiene a mínima presión y esto es controlado por el
solenoide de control de presión que recibe un voltaje de alimentación
de 5 volts.
En la figura 33, figura 34 y figura 35 se muestra el funcionamiento
mecánico e hidráulico de la marcha Tercera.
(General Motors, 1992).
43
Figura 33. Flujo de potencia - Tercera
(General Motors, 1992)
Figura 34. Funcionamiento - Tercera
(General Motors, 1992)
44
Figura 35. Circuito hidráulico - Tercera
(General Motors, 1992)
45
2.2.7 CUARTA MARCHA
Para maximizar la eficiencia del motor y el consumo de combustible, la
relación de transmisión de la cuarta marcha es aproximadamente de 0.73:1.
(General Motors, 1992).
Los discos de embrague 3-4 y la cintra de freno 2-4 permanecen
aplicados. Embrague del convertidor de par aplicado.
El porta satélites y los satélites giran en sentido horario al estar
estacionario el engranaje solar de reacción.
La corona de engranaje interno de reacción y el eje de salida,
transmiten el movimiento para la cuarta marcha.
El porta satélites de entrada gira más rápido que el embrague de
marcha adelante, lo que ocasiona un resbalamiento en el embrague
de cuña. Como resultado, el embrague de marcha adelante y el
embrague de patín son ineficaces en cuarta macha.
La válvula manual se acciona al colocar la palanca de mando el rango
Drive y dependiendo de las condiciones pasa a cuarta marcha.
El fluido de aceite se dirige hacia los solenoides de cambio los cuales
en la combinación adecuada acciona el embrague de avance, el
embrague 3-4, la cinta de freno 2-4, para obtener la cuarta marcha.
Se activa el solenoide TCC y el fluido activa el embrague del
convertidor de par.
El TCC PWM lo controla la PCM para hacer un acoplamiento más
suave
del
convertidor
de
par,
esto
se
logra
aumentando
consecutivamente la presión del fluido en el cuerpo de válvulas que
va hacia el embrague del convertidor de par.
El sistema se mantiene a mínima presión a través del solenoide de
control de presión que recibe un voltaje de alimentación de 5 volts.
En la figura 36, figura 37 y figura 38 se muestra el funcionamiento
mecánico e hidráulico de la marcha Cuarta.
(General Motors, 1992).
46
Figura 36. Flujo de potencia - Cuarta
(General Motors, 1992)
Figura 37. Funcionamiento – Cuarta
(General Motors, 1992)
47
Figura 38. Circuito hidráulico - Cuarta
(General Motors, 1992)
48
2.3
FUNCIONAMIENTO
ELECTRÓNICO
DE
LA
TRANSMISIÓN AUTOMÁTICA 4L60E
2.3.1 DESCRIPCIÓN DE LA TRANSMISIÓN AUTOMÁTICA 4L60E
La Hydra -Matic 4L60 -E es una caja de cuatro velocidades, tracción trasera
totalmente automática, es controlada electrónicamente. Está formado
principalmente por un convertidor de par, dos conjuntos de engranajes
planetarios, una cinta de freno y embragues mecánicos y un sistema de
presurización y control hidráulico. (General Motors, 1992).
El convertidor de par de cuatro elementos contiene una bomba, una turbina,
una placa de presión dentado a la turbina, y un conjunto de estator. El
convertidor de par actúa como un acoplamiento de fluido para transmitir sin
problemas de potencia desde el motor a la transmisión. También
proporciona hidráulicamente multiplicación de par adicional cuando sea
necesario, cuando se aplica el embrague del convertidor de par proporciona
un acoplamiento mecánico accionamiento directo del motor a la transmisión.
(General Motors, 1992).
Los dos conjuntos de engranajes planetarios ofrecen las cuatro velocidades
hacia adelante y atrás, cambiar las relaciones de transmisión es totalmente
automático y se realiza mediante el uso de un módulo de control (PCM), el
PCM recibe y supervisa diversas entradas y utiliza esta información para
poner la transmisión en el cambio óptimo. (General Motors, 1992).
El PCM controla los solenoides del cuerpo de válvulas, también la aplicación
y liberación del embrague del convertidor de par que permite que el motor
ofrezca la máxima eficiencia de combustible sin sacrificar el rendimiento del
vehículo. (General Motors, 1992).
El sistema hidráulico se compone principalmente de un cuerpo de la válvula,
la bomba de paletas y el cárter. La bomba mantiene la presión de trabajo
49
necesario para el accionamiento de los componentes de fricción.
(General Motors, 1992).
Los componentes de fricción utilizados en esta transmisión constan de cinco
múltiples embragues de disco y una banda. Los embragues de disco se
combinan con dos componentes mecánicos, un embrague de rodillos y un
embrague de cuña, para entregar cinco relaciones de transmisión diferentes
a través de las distintas marchas disponibles. (General Motors, 1992).
2.3.2 CENTRALITA ELECTRÓNICA O MÓDULO
El módulo de gestión del cambio es un microprocesador capaz de procesar
las señales que recibe de todos los sensores y de otros módulos o
centralitas de mandos, en la figura 39 se observa un módulo electrónico.
(Bosh GmbH, 2002).
Figura 39. Módulo electrónico
(Divassón, 2011)
Las señales de entrada son analizadas y procesadas de tal modo que se
determinen las señales de salida para las distintas electroválvulas de la
unidad hidráulica.
50
La activación de las electroválvulas en el cuerpo hidráulico permite que se
abra o cierre el paso del fluido hidráulico hacia los embragues y frenos,
estos a su vez se encargan de liberar o unir los elementos de los trenes
epicicloidales y obtener las distintas velocidades disponibles en la caja de
cambios automática.
2.3.3 COMPONENTES ELÉCTRICOS
La transmisión automática Hydra-Matic 4L60-E incorpora controles que
utilizan un módulo de control del tren motriz llamado PCM. La PCM recopila
información de funcionamiento del vehículo a partir de una variedad de
sensores y componentes de control ubicados en todo el sistema de
propulsión tanto de Motor y transmisión, en la figura 40 se muestra las partes
de la transmisión automática 4L60E. (ATSG, 1993).
El PCM procesa la información que emite el vehículo para el control
adecuado de distintos aspectos:
Los cambio de marcha de la transmisión; a través de la utilización de
solenoides de cambio.
Sensación de cambios de la transmisión mediante el ajuste de presión
de la línea a través del uso de un solenoide de control de presión
Aplicar el TCC, a través del uso de un TCC solenoide y un solenoide
PWM TCC
El cambio descendente 3-2; a través del uso de un solenoide de
control 3-2
El control electrónico de la transmisión de estas operaciones
proporciona características de los puntos de cambios consistentes y
precisos, además de la calidad de los cambios en base de las
condiciones de funcionamiento, tanto del motor y la transmisión.
(General Motors, 1992).
51
Figura 40. Partes de la transmisión automática 4L60E
(General Motors, 1992)
2.3.4 ENTRADAS Y SALIDAS
EN EL
CONTROL
DEL
CAMBIO
AUTOMÁTICO
En la figura 41 se muestra el esquema general de la caja de cambios
automática 4L60E.
52
Figura 41. Esquema General de Control Electrónico - 4L60E
(ATSG, 1993)
53
2.3.5 SEÑALES DE ENTRADA
2.3.5.1
Sensor de velocidad del vehículo (VSS)
El sensor de velocidad del vehículo es un campo de inducción magnética
para informar la velocidad del vehículo a la PCM, el VSS se encuentra en la
carcasa de extensión de transmisión.
Esta señal de corriente alterna se envía a la PCM que convierte en una
corriente continua (CC). Esta corriente se interpreta como la velocidad del
vehículo. A medida que aumenta la velocidad del vehículo la frecuencia de la
señal de corriente continua también aumenta. El PCM interpreta este
incremento en la frecuencia como un aumento de la velocidad del vehículo,
como se muestra en la figura 42.
(General Motors, 1992).
Figura 42. Sensor de velocidad
(General Motors, 1992)
54
2.3.5.2
Conmutador de corta 4WD
Este conmutador informa al PCM de que se a modo 4WD. La señal se utiliza
para modificar la señal del sensor de velocidad de salida y responder a la
reducción de marcha que está teniendo lugar. (General Motors, 1992).
2.3.5.3
Sensor de posición del acelerador (TPS)
El TPS es un potenciómetro que indica la apertura de la aleta de aceleración
dependiendo de la carga del vehículo, el PCM proporciona una señal de
referencia de 5 voltios y una masa para el TPS y el sensor devuelve una
señal de voltaje que cambia con la apertura de la mariposa, esta señal varia
de 0 voltios a ralentí a casi 5,0 voltios a máxima aceleración. El PCM utiliza
esta información para modificar el control de combustible, suavidad en el
cambio y aplicación del TCC. (General Motors, 1992).
Las condiciones, a una mayor apertura del TPS se tiene lo siguiente:
•
El PCM retarda los cambios ascendentes o inicia una reducción de
marcha (a través de los solenoides de cambio) para aumentar la
aceleración.
•
El aumento de presión en la línea PCM (a través del solenoide de
control de presión) para aumentar la fuerza de sujeción de las garras
y / o banda.
•
El PCM mantiene la TCC liberada durante aceleraciones fuertes.
(General Motors, 1992).
2.3.5.4
Conjunto de conmutadores de marcha (PSA)
Los conmutadores de presión de marchas se unen al cuerpo de válvulas, se
componen de 5 interruptores y se utiliza para señalar la posición de la
válvula manual de la palanca de cambios, como se muestra en la figura 43.
55
Varios fluidos se encuentran en el PSA en función de la posición de la
válvula manual, estos fluidos abren y se cierran los interruptores de presión
de fluido en la PSA para proporcionar una señal al PCM que indica la
posición de la gama seleccionada de la válvula manual, en la figura 44 se
muestra la lógica de los switchs de los conmutadores de marchas. La
combinación de interruptores abiertos y cerrados determina el voltaje medido
en cada uno de los tres pasadores en el conector eléctrico del PSA. Un
circuito abierto mide 12 voltios, mientras que un circuito conectado a tierra
mide 0 voltios, como se muestra en la tabla 2 y tabla 3. (General Motors, 1992).
Figura 43. Conmutadores de marchas
(General Motors, 1992)
56
Tabla 2. Conmutador de marchas – Activación
Tabla 3. Conmutador de marchas – Voltaje
57
1
2
REV
LO
(N/O)
(N/O)
3
D4
D3
(N/C)
(N/O)
D2
(N/C)
GROUND
RANGO NEUTRAL
Figura 44. Lógica de los switchs
(General Motors, 1992)
2.3.5.5
Sensor de temperatura del fluido de la transmisión (TFT)
El sensor de temperatura es un termistor de tipo NPN, que proporciona la
información a la PCM sobre la temperatura del fluido de la transmisión. La
resistencia eléctrica interna del sensor varía en relación con la temperatura
del aceite de la transmisión, como se muestra en la figura 45. (ATSG, 1993).
El rango del sensor es de 0 a 5 voltios, dependiendo de la temperatura del
fluido ya que a una elevada temperatura se tiene una baja resistencia y al
contrario si se tiene una baja temperatura se tiene una elevada resistencia.
El PCM mide esta tensión como otra entrada para el control del TCC y la
presión de línea. La aplicación de la TCC reduce la temperatura de los
fluidos creados por el acoplamiento del convertidor. (ATSG, 1993).
El PCM evita la aplicación del TCC hasta que la temperatura del fluido de
transmisión alcanza aproximadamente 29 ° C (84 ° F) y cuando la
temperatura del fluido excede 135 ° C (275 ° F), la PCM aplica el TCC en
todo momento en la cuarta velocidad. (General Motors, 1992).
58
Figura 45. Sensor TFT
(General Motors, 1992)
2.3.5.6
Velocidad de entrada (Motor)
La PCM utiliza la señal de las revoluciones del motor para controlar la
transmisión automática, en el caso de la transmisión 4L60E de GM utiliza el
sensor CKP para determinar las revoluciones por minuto. Esta información
se utiliza para ayudar a determinar los patrones de cambio de marcha, la
aplicación del TCC y el tiempo de liberación. (ATSG, 1993).
El sensor CKP puede ser inductivo o de efecto Hall, el cual envía a la PCM
la información sobre la posición del cigüeñal y las RPM del motor.
59
2.3.5.7
Sensor MAP
El sensor MAP mide los cambios relativos a la presión de múltiple de
admisión que son el resultado de los cambios en la velocidad y carga del
motor, Estos cambios son monitoreados por el PCM con el fin de ajustar la
presión de línea y secuencia de cambio. (General Motors, 1992).
2.3.5.8
Sensor ECT
El sensor de ECT es una resistencia de coeficiente negativo, que mide la
temperatura del líquido refrigerante del motor.
Este valor es indispensable para el control de la transmisión automática
debido a que a bajas temperaturas del refrigerante evita la aplicación del
TCC, esta condición se da cuando la temperatura del refrigerante está por
debajo de aproximadamente 20 ° C (68 ° F). (General Motors, 1992).
2.3.5.9
Interruptor de la señal de aire acondicionado (A / C)
Cuando el interruptor se cierra, el PCM recibe la señal que le compresor esta
encendido. El PCM utiliza esta información para ajustar la presión de la línea
de transmisión, sincronización del cambio. (General Motors, 1992).
2.3.5.10 Entrada del régimen de crucero
Cuando se activa el régimen crucero una señal informa a la PCM de que se
ha seleccionado el control de crucero, con esto la PCM reduce el número de
cambios d marcha para tener una velocidad estable. (General Motors, 1992).
2.3.5.11 Conmutador de freno
Es normalmente cerrado cuando no está accionado, pero cuando se pisa el
pedal de frenos el conmutador se abre cortando la señal eléctrica que va a la
60
PCM, esta señal se utiliza para control de la transmisión, cuando se pisa el
pedal de freno se libera el TCC. (General Motors, 1992).
2.3.6 SEÑALES DE SALIDA
Figura 46. Señales de salida de la transmisión
(ATSG, 1993)
61
2.3.6.1
Solenoide del embrague del convertidor de par
Es una válvula que se energiza para su activación y es normalmente abierto,
al activarse obtura el paso de aceite haciendo que se cree una presión para
el acoplamiento del embrague del convertidor, en la figura 47 se observa
este solenoide.
Cuando este solenoide se activa, en el convertidor de par ya no se aplica el
par de multiplicación y giran a la misma velocidad del el motor.
En condiciones normales de funcionamiento, el embrague del convertidor se
aplica para cuarta marcha en rango Overdrive, además cuando la
temperatura del fluido de la transmisión está aproximadamente superior a
135 ° C, la TCC se aplica todo el tiempo en cuarta marcha e inclusive en
tercera marcha para ayudar a reducir la temperatura del fluido de
transmisión.
(ATSG, 1993).
Condiciones para el funcionamiento:
• La TCC se libera cuando se pisa el pedal del freno.
• La TCC se libera en condiciones mínimas y máximas del acelerador.
• No se aplica la TCC antes que la temperatura del refrigerante del motor
este por encima de 20 ° C.
• No se aplica la TCC antes que la temperatura del fluido de transmisión este
por encima de 29 ° C.
(General Motors, 1992).
La PCM toma la decisión de activar el TCC médiate algunas señales como
son: el sensor de velocidad de salida, conmutadores de presión PSA, el
sensor TFT, las revoluciones del motor, el sensor MAP, conmutador de
frenos, la señal de aire acondicionado, TPS, el conmutador de corta de
4WD. (General Motors, 1992).
62
El flujo máximo de corriente no debe de exceder de los 1.5 amp.
Figura 47. Solenoide TCC
(General Motors, 1992)
2.3.6.2
Solenoide de control de presión
El solenoide de control es un regulador de presión de precisión electrónico
controlado por el PCM que trabaja aproximadamente a 292,5 Hz (ciclos por
segundo), controla la presión basado en el flujo de corriente a través de la
bobina. El campo magnético producido por la bobina mueve a la válvula
interna del solenoide que hace variar la presión, en la figura 48 se muestra
este solenoide. (ATSG, 1993).
La PCM controla el solenoide de control de presión por la corriente en el
rango de 0 a 1.1 amp, en lo que corresponde que 0 amp es la presión
máxima y el 1.1 amp es la mínima presión. (ATSG, 1993).
El PCM manda la corriente al PCS dependiendo de la carga del motor para
controlar los cambios. (ATSG, 1993).
63
Las señales de entradas son algunas pero la más importante es la del
sensor TPS. (ATSG, 1993).
El relé de presión, los valores de corriente y voltaje para los cambios 1-2, P,
R, N es a 0,5 amperios a 2V y para los cambios 3-4, es 1.1 amperios a 5 V.
(ATSG, 1993).
Figura 48. Solenoide de control de presión
(General Motors, 1992)
2.3.6.3
Solenoides de cambio 1-2 y 2-3
La transmisión automática Hydra-Matic 4L60-E utiliza dos solenoides de
cambio electrónico que están normalmente abiertos que controlan los 4
cambios ascendentes de marcha hacia delante.
Estos solenoides 1-2 (A) y 2-3 (B) de cambio trabajan juntos en una
combinación de secuencias de encendido y apagado para controlar la
posición de la válvulas de cambio de marchas de 1-2, 2-3 y de 3-4. El PCM
controla diferentes señales de entrada para determinar la combinación del
estado de solenoide adecuada. (General Motors, 1992).
En la figura 49 se muestra el solenoide de cambio 1-2 y 2-3.
64
Figura 49. Solenoide de cambio 1-2, 2-3
(General Motors, 1992)
La tabla 4 se muestra la combinación del estado de solenoide requerido para
obtener cada marcha:
Tabla 4. Estado de solenoides de cambio
(General Motors, 1992)
2.3.6.4
Solenoide de control 3-2
Este solenoide es el encargado de realizar el cambio descendente de
marcha de 3-2, es normalmente cerrado, regula la temporización y liberación
del embrague 3-4 y la aplicación de la cinta de freno 2-4.
La PCM regula el trabajo del solenoide con la señal de la velocidad del
vehículo, y la señal del sensor TPS. (General Motors, 1992).
65
El PCM opera el solenoide de control 3-2 a una frecuencia de 50 Hz (ciclos
por segundo). La cantidad de tiempo que el solenoide se activa durante cada
ciclo se conoce como ciclo de trabajo del solenoide. El porcentaje del ciclo
de trabajo significa que durante cada ciclo el solenoide está energizado
cierto porcentaje del tiempo.
El solenoide de control 3-2 opera en un ciclo negativo, lo que significa que el
lado de tierra del solenoide es controlado por el PCM. El solenoide es
constantemente alimentado con 12 voltios, en la figura 50 se muestra el
solenoide de control 3-2. (General Motors, 1992).
Figura 50. Solenoide de control 3-2
(General Motors, 1992)
2.3.6.5
Solenoide PWM TCC
La válvula de solenoide PWM TCC es un ancho de pulso modulado que se
utiliza para controlar la aplicación y liberación, del embrague del convertidor.
El PCM opera el solenoide con un ciclo de trabajo negativo a una frecuencia
fija de 32 Hz para controlar la velocidad de aplicación del TCC y la
liberación. El solenoide es un componente de control electrónico para la
66
aplicación del TCC y liberar presiones para tener un funcionamiento más
suave del TCC. (General Motors, 1992).
En la primera marcha, a unos 13 km / h (8 mph), el PCM opera la válvula de
solenoide PWM TCC, aproximadamente 90 por ciento del ciclo de trabajo
punto S en el gráfico Este ciclo de trabajo se mantiene hasta que se aplica el
TCC. Cuando las condiciones de funcionamiento del vehículo son
apropiados para aplicar la TCC, el PCM disminuye inmediatamente el ciclo
de trabajo al 0 por ciento, luego aumenta a aproximadamente el 25% punto
C en el gráfico. El PCM luego pone el ciclo de trabajo a aproximadamente
un 50%, luego al 90% en esta etapa se encuentra totalmente bloqueado el
embrague del convertidor, para desactivar pasa al 50% para liberar la
presión, después pasa a 0% en la que no hay presión y el TCC se ha
desactivado, en la última etapa se pone en al 90% del ciclo de trabajo y aquí
se mantiene hasta que se aplica el TCC nuevamente. (General Motors, 1992).
La PCM aumenta el ciclo de trabajo para controlar la aplicación del TCC. Del
mismo modo, el PCM también desacelera el ciclo de servicio del solenoide
para controlar la liberación del TCC. En torques altos o altas velocidades del
vehículo, el embrague del convertidor está completamente bloqueado.
En la figura 51 se muestra los ciclos de trabajo de este solenoide.
(General Motors, 1992).
67
PORCENTAJE DE CICLO
DE TRABAJO
100%
S
F
G
E
H
K
75
D
50
25
0
C
A
B
TCC (PWM)
PRESIÓN
DEL
FLUIDO
I
J TIEM PO
TCC PWM
Figura 51. Ciclos de trabajo del TCC PWM
(General Motors, 1992)
Los ciclos de trabajo reales variarán dependiendo de la aplicación del
vehículo ya las condiciones de funcionamiento.
68
2.4
DELIMITACIÓN
DE
CONDICIONES
DE
FUNCIONAMIENTO DE LA TRANSMISIÓN AUTOMÁTICA
PARA EL DESARROLLO DEL BANCO DIDÁCTICO
2.4.1 ANÁLISIS DE LOS PARÁMETROS PARA LA ELABORACIÓN DEL
BANCO DIDÁCTICO
Para el desarrollo de este banco didáctico es importante analizar
detenidamente cada uno de los componentes electrónicos de la transmisión
automática, los mismos que se han detallado en el capítulo anterior, se
tomara en cuenta los más principales debido a que no está implementado en
un motor real.
En la figura 52 se determina las señales que se va a implementar en el
banco, cabe destacar que el sensor TPS y el sensor MAP van a dar la señal
de las revoluciones por lo que se asume el control a un solo mando.
Figura 52. Partes de la transmisión automatica 4L60E - Banco didáctico
69
Los parámetros de los elementos a usar son sensores, actuadores y una
centralita que procese esta información.
Según el manual de la ATSG de la caja de cambios automática 4l60-E se
muestra las relaciones de la posición del sensor TPS el cual indica la carga a
la que está sometida el motor y las r.p.m. de salida que es tomada del
sensor de velocidad del vehículo.
Para desarrollar el banco didáctico se ha tomado como referencia el motor
de 4.3 litros, en la tabla 5 se muestra los rangos de cambio.
Tabla 5. Rangos de Cambios en RPMs - 4L60E
MOTOR MOD.
4.3 L
(L35)
MOTOR MOD
4.3 L
(L35)
M/L
S/T
M/L
S/T
RELACIÓN
C/C
3.42/3.73
3.08/3.42
RELACIÓN
CONO/CORONA
3.42/3.73
3.08/3.42
1-2 CAMBIO +/- 250 RPM
TPS 10 20 30 40 50
566 784 828 893 915
545 784 828 893 915
2-3 CAMBIO +/- 250 RPM
3-4 CAMBIO +/- 150 RPM
10 20
30
40
50
10
20
30 40 50
981 1482 1656 1765 1787 1395 1918 3488 - 981 1460 1656 1765 1787 1438 2005 3488 - (ATSG, 1993)
2.4.2 SENSORES Y ACTUADORES
Para este tipo de caja automática existen varios sensores y actuadores pero
en el banco didáctico se utilizarán los siguientes debido a que se trata de un
material didáctico.
70
ENTRADAS
SALIDAS
RPM MOTOR
SOLENOIDE 1-2
RPM SALIDA
SOLENOIDE 2-3
TFT
SOLENOIDE DE CONTROL 3-2
PCM
ECT
SOLENOIDE DE CONTROL DE
PRESIÓN
CONMUTADOR DE FRENO
TCC
CONMUTADORES DE
MARCHAS
TCC PWM
Figura 53. Transmisión Automática - Entradas y Salidas
2.4.2.1
Rpm motor – Rpm salida
La PCM controla las revoluciones de salida como las de entrada para
determinar los cambios de velocidad, en la tabla de la General Motors
Company se tiene dos datos principales, las revoluciones de salida y la
apertura del TPS, se ha tomado como referencia los datos del motor 4.3L
(L35), S/T, con la relación del cono- corona de 3.08:1, a una apertura del
TPS de 30 en cambios ascendentes y a una apertura del TPS en el rango de
0-10 en cambios descendentes.
En los datos del manual se indica que la apertura de la aleta es de 180
grados que representa el 100% de la apertura del TPS, pero la aleta solo se
71
abre 90 grados lo que indica que la apertura máxima es de 50% a máxima
carga.
Teniendo en cuenta las condiciones de la tabla 5, se obtienen las siguientes
tablas:
Tabla 6. Rangos de RPMs Reales
CAMBIOS ASCENDENTES Y DESCENDENTES
RPM
MARCHA
ENTRADA
(MOTOR)
RELACION DE
TRANSMISION
RPM SALIDA
PRIMERA
700 - 2534
3,06
0 - 828
SEGUNDA
1343 - 2699
1,63
829 - 1656
TERCERA
1657 - 3488
1,00
1657- 3488
CUARTA
2442 - 4000
0,70
3489 - 5714
Tabla 7. Rangos de RPMs a Simular
CAMBIOS ASCENDENTES Y DESCENDENTES
RPM
ENTRADA
MARCHA
(MOTOR)
RELACION DE
RPMS
TRANSMISION
SALIDA
PRIMERA 700 - 2534
3,06 0 - 828
SEGUNDA 2535 - 2699
1,63 829 - 1656
TERCERA 2700 - 3488
1,00 1657- 3488
CUARTA
0,70 3489 - 5714
3489 - 4000
72
Tabla 8. Rangos de RPMs de Reversa
REVERSA
RPM
MARCHA
ENTRADA
(MOTOR)
REVERSA
700 - 1904
RELACION DE
TRANSMISION
2,30
RPM SALIDA
0 - 828
En la primera marcha, tanto en ascendente como descendente y marcha de
reversa, para obtener el valor máximo de las rpm de entrada se usa la
relación de transmisión que tenemos en el manual, los valores de rangos ara
simular se toman en cuenta debido a que no se puede simular los rangos
reales.
2.4.2.2
Sensor de temperatura del fluido de la transmisión (TFT)
Sirve de ayuda para el control del solenoide TCC, es un termistor de tipo
NPN.
Tiene una señal de referencia de 5 voltios y la señal de salida varía
dependiendo de la temperatura del fluido. En la tabla 9 se muestra los
rangos del sensor TFT.
73
Tabla 9. Rangos de Temperatura del Sensor TFT
(ATSG, 1993)
Condiciones:
TCC no se aplica hasta que la temperatura del fluido llegue a los 29ºC
o 84ºF, la temperatura normal es entre 70 a 80 ºC aproximadamente.
Cuando la temperatura excede los 135ºC o 275ºF el TCC se aplica en
todo momento para cuarta marcha e incluso se aplica para tercera
marcha.
2.4.2.3
Sensor de temperatura del motor (ECT)
Controla la temperatura del motor para de esta manera determinar la
aplicación del TCC.
Si la temperatura es menor a 20ºC no se activa el TCC.
74
2.4.2.4
Conmutador de freno
Este normalmente se encuentra cerrado cuando el pedal de freno no está
accionado.
Esta señal se utiliza para control de la transmisión, cuando se pisa el
pedal de freno se libera el TCC.
2.4.2.5
Conmutadores de marchas
Los conmutadores de marchas (PSA), se componen de 5 interruptores y se
utiliza para señalar la posición de la válvula manual de la palanca de
cambios. Estos interruptores proporcionan una señal al PCM que indica la
posición del rango de marcha seleccionado de la válvula manual. Un circuito
abierto mide 12 voltios, mientras que un circuito conectado a tierra mide 0
voltios, como se muestra en la tabla 10.
Tabla 10. Conmutador de Marchas
(General Motors, 1992)
75
2.4.2.6
Solenoide 1-2(A), 2-3 (B)
Son todos normalmente abiertos y tienen la siguiente combinación que se
muestra en la tabla11.
Tabla 11. Accionamiento de Solenoides de Cambio
MARCHA
2.4.2.7
SOLENOIDE
SOLENOIDE
(A) 1-2
(B) 2-3
P-N-R
ON
ON
PRIMERA
ON
ON
SEGUNDA OFF
ON
TERCERA OFF
OFF
CUARTA
OFF
ON
Solenoide de control 3-2
Es normalmente cerrado y sirva para controlar el cambio descendente
de marcha 3-2.
Regula la temporización y liberación del embrague 3-4 y la aplicación
de la cinta de freno 2-4.
Trabaja a 50hz.
La conexión a masa pone la PCM.
2.4.2.8
Solenoide de control de presión (PCS)
Se controla mediante la corriente suministrada en la que el rango va
desde 0 a 1.1 amperios, donde 0 es la máxima presión y 1.1 la
mínima presión.
76
Las condiciones generales en los rangos 1 – 2 – P – R – N, trabaja a
0.5 amperios y 2 voltios.
Las condiciones generales en los rangos 3 – 4, trabaja a 1.1 amperios
y 5 voltios.
2.4.2.9
Solenoide TCC
Es normalmente abierto y cuando este se aplica el motor gira a la misma
velocidad del convertidor.
Se activa para cuarta marcha en el rango Overdrive.
Se libera cuando se pisa el pedal de freno.
Se toma en cuenta las condiciones de los sensores TFT y ECT.
2.4.2.10 Solenoide PWM TCC
La válvula de solenoide PWM TCC es un ancho de pulso modulado que se
utiliza para controlar la aplicación y liberación, del embrague del convertidor
además sirve para controlar la velocidad de aplicación del TCC y la
liberación.
El PCM opera la válvula de solenoide PWM TCC, aproximadamente 90 por
ciento del ciclo de trabajo hasta que se aplica el TCC. Cuando las
condiciones de funcionamiento del vehículo son apropiados para aplicar la
TCC, el PCM disminuye inmediatamente el ciclo de trabajo al 0 por ciento,
luego aumenta a aproximadamente el 25% punto C en el gráfico. El PCM
luego pone el ciclo de trabajo aproximadamente a un 50%, luego al 90% en
esta etapa se encuentra totalmente bloqueado el embrague del convertidor,
para desactivar pasa al 50% para liberar la presión, después pasa a 0% en
la que no hay presión y el TCC se ha desactivado, en la última etapa se
pone en al 90% del ciclo de trabajo y aquí se mantiene hasta que se aplica el
TCC nuevamente, como se muestra en la figura 54. (General Motors, 1992).
77
PORCENTAJE DE CICLO
DE TRABAJO
100%
S
F
G
E
H
K
75
D
50
25
0
C
A
B
TCC (PWM)
PRESIÓN
DEL
FLUIDO
J TIEM PO
I
TCC PWM
Figura 54. Ciclos de Trabajo TCC PWM
(General Motors, 1992)
2.4.3 DIAGRAMA
DEL
CONTROL
DE
LA
CAJA
DE
CAMBIOS
AUTOMÁTICA
Teniendo en cuenta todas las entradas y salidas indispensables para la el
funcionamiento del banco, se elaboró un esquema de la parte electrónica de
cómo se conforma el control electrónico de una transmisión automática,
como se muestra en la figura 55.
ENTRADA
ENTRADA
ENTRADA
PCM
ENTRADA
ENTRADA
SALIDAS
ENTRADA
FRENO
ENTRADA
TFT
PSA
RUEDAS
RELÉS
SOLENOIDES
TPS
MOTOR
RPM
ENTRADA
TRANSMISION AUTOMATICA
RPM
SALIDA
ECT
RUEDAS
P–R–N–D–3–2–1
Figura 55. Esquema de la parte electrónica de la transmisión automática
78
Las revoluciones de entrada del motor tienen una relación estricta
conjuntamente con la relación de la transmisión, en base a estas dos
variables se determina el funcionamiento de la trasmisión automática, las
señales que se envían al PCM se procesan en la computadora para de esta
manera actúan sobre los relés de los solenoides que permiten que el
sistema hidráulico de la caja activen los distintos embragues y frenos para
modificar el tren epicicloidal para que se proporcione los cambios. (José
Manuel, 2001).
2.4.4 VALORES DE VOLTAJE AL QUE TRABAJAN LOS ELEMENTOS
En la tabla 12 se muestra los voltajes de trabajo del control electrónico de la
caja de cambios automática.
Tabla 12. Voltajes de Trabajo del Control Electrónico
ELEMENTO
VOLTAJE
1-2, 2-3, CONTROL DE PRESIÓN
SOLENOIDE (LOW)
0V
TFT (LOW)
0V
3-2 SOLENOIDE DE CONTROL (LOW)
0V
SOLENOIDE TCC PWM (LOW)
0V
SOLENOIDE TCC (LOW)
0V
1-2 SOLENOIDE (HIGH)
12 V
2-3 SOLENOIDE (HIGH)
12 V
SOLENOIDE DE CONTROL DE PRESIÓN
(HIGH)
5V
TFT (HIGH)
5V
3-2 SOLENOIDE DE CONTROL (HIGH)
12 V
SOLENOIDE TCC PWM (HIGH)
5V
SOLENOIDE TCC (HIGH)
12 V
RANGO "N"
0 - 12 V
RANGO "R"
0 - 12 V
RANGO "P"
0 - 12 V
LOW = CERO VOLTIOS , HIGH = VOLTAJE DE
ACTIVACIÓN
79
2.4.5 ACCIONAMIENTO ELECTRÓNICO DE LA CAJA AUTOMÁTICA
Tabla 13. Accionamiento Electrónico de la Transmisión
SOLENOIDES DE
DESPLAZAMIENTO
RANGO
MARCHA
TCC
SOLENOIDE
A (1-2)
B (2-3)
NO
SOLENOIDE
TCC PWM
DE
NC
CONTROL
DE PRESION
SOLENOIDE
SOLENOIDE
DE
DE
CONTROL
CONTROL
(3-2) N C
(3-2) N C
SUBIDA
BAJADA
PARK
ON
ON
OFF
OFF
ON 2VOLTS
OFF
OFF
REVERSE
ON
ON
OFF
OFF
ON 2VOLTS
OFF
OFF
NEUTRO
ON
ON
OFF
OFF
ON 2VOLTS
OFF
OFF
1
ON
ON
OFF
ON
ON 2VOLTS
OFF
OFF
2
OFF
ON
OFF
ON
ON 2VOLTS
ON
OFF
3
OFF
OFF
OFF
ON
ON 5VOLTS
ON
ON
4
ON
OFF
ON
ON
ON 5VOLTS
ON
ON
1
ON
ON
OFF
ON
ON 2VOLTS
OFF
OFF
2
OFF
ON
OFF
ON
ON 2VOLTS
ON
OFF
3
OFF
OFF
OFF
ON
ON 5VOLTS
ON
ON
1
ON
ON
OFF
ON
ON 2VOLTS
OFF
OFF
2
OFF
ON
OFF
ON
ON 2VOLTS
OFF
OFF
1
ON
ON
OFF
ON
ON 2VOLTS
OFF
OFF
OVERDRIVE
DRIVE
2
1
(General Motors, 1992)
80
2.4.6 ACCIONAMIENTO DE LA PARTE MECÁNICA DE LA CAJA AUTOMÁTICA
Tabla 14. Accionamiento Mecánica de la Transmisión
SOLENOIDES DE
RANGO
MARCHA
DESPLAZAMIENTO
A
B
PARK
ON
ON
REVERSE
ON
ON
NEUTRO
ON
ON
1
ON
ON
OVER
2
OFF
ON
DRIVE
3
OFF
OFF
4
ON
OFF
1
ON
ON
2
OFF
ON
3
OFF
OFF
1
ON
ON
2
OFF
ON
1
ON
ON
DRIVE
2
1
CINTA FRENO
2-4
EMBRAGUE
EMBRAGUE
DE ENTRADA
DE SOBRE
INVERSA
ACELERACION
EMBRAGUE
DE AVANCE
EMBRAGUE
DE CUÑAS
DE AVANCE
EMBRAGUE
3-4
EMBRAGUE
EMBRAGUE
RODILLOS
CONTRA
INVERSA
INVERSA
ACCIONADO
ACCIONADO
ACCIONADO
ACCIONADO
ACCIONADO
RETIENE
ACCIONADO
RETIENE
ACCIONADO
RETIENE
ACCIONADO
RETIENE
ACCIONADO
ACCIONADO
ACCIONADO
RETIENE
ACCIONADO
RETIENE
ACCIONADO
ACCIONADO
RETIENE
ACCIONADO
ACCIONADO
RETIENE
ACCIONADO
ACCIONADO
RETIENE
ACCIONADO
ACCIONADO
RETIENE
ACCIONADO
ACCIONADO
ACCIONADO
RETIENE
ACCIONADO
RETIENE
RETIENE
(General Motors, 1992)
81
2.5
ELEMENTOS
ELÉCTRICOS
Y
ELECTRÓNICOS
UTILIZADOS EN LA ELABORACION DEL BANCO
DIDACTICO
2.5.1 LENGUAJE C
El lenguaje C es muy útil en la programación de los microcontroladores
debido a que permite realizar operaciones tanto sobre los bits y los bytes.
Es muy accesible y fácil de usar ya que con comandos se da las órdenes al
microcontrolador, C es un lenguaje compilado, lo que significa que los
archivos fuentes que contienen el código C se traducen a lenguaje máquina
por el compilador del programa usado. El compilador genera varios archivos
entre estos el .hex, este formato es hexadecimal y es el que se lo sube al
microcontrolador para su funcionamiento. Para realizar la programación de la
simulación del banco didáctico de la transmisión automática utilizamos el
PICC Compiler, en la figura 56 se muestra el proceso de programación de
Microcontroladores. (MikroElektronika, 2013).
Figura 56. Programación en lenguaje C
(MikroElektronika, 2013)
82
2.5.2 MICROCONTROLADOR
Es un circuito integrado programable que ejecuta las órdenes guardadas en
su memoria, se compone de diferentes bloques que cumplen una tarea
específica.
Un microcontrolador se compone generalmente de los siguientes elementos
que se muestran en la figura 57:
Figura 57. Microcontrolador
(MikroElektronika, 2013)
Procesador o UCP (Unidad Central de Proceso).
Memoria RAM para Contener los datos.
Memoria para el programa.
Periféricos E/S para comunicarse con el exterior.
83
Diversos módulos para el control de periféricos (temporizadores,
Puertas Serie y Paralelo, CAD, CDA, etc.).
Generador de impulsos de reloj que sincronizan el funcionamiento de
todo el sistema.
(Ángulo Usartegui, 2007).
Para desarrollar este banco se utilizó el pic 18F452 y el 18f4550 debido a la
velocidad de respuesta, la estabilidad, la memoria de almacenamiento, otra
razón por la que se utilizó dos microcontroladores es la falta de pines
disponibles para poder configurar tanto las entradas y salidas de todos los
elementos necesarios para la simulación del control electrónico de una
transmisión automática. (Ángulo Usartegui, 2007).
Este elemento funciona como la PCM del banco en donde entraran señales
se procesa y activaran los distintos elementos del banco.
2.5.3 RESISTENCIAS
Es un componente electrónico que tiene la función de limitar el paso de la
corriente en el circuito o para fijar el valor de la tensión, no poseen polaridad
alguna.
La unidad de la resistencia es el ohmio y se utiliza el código de colores para
determinar su valor en ohmios.
Es un material formado por carbón y otros elementos resistivos para
disminuir la corriente que pasa. La corriente máxima en un resistor viene
condicionada por la máxima potencia que pueda disipar su cuerpo. Los
valores más comunes son 0,25 W, 0,5 W y 1 W. (Antonio Bueno, s.f.).
84
Tabla 15. Código de colores
(wikipedia, 2013)
2.5.4 POTENCIÓMETROS
Son resistencias variables cuya función principal es variar el valor de la
resistencia en el circuito, también se los llama reóstatos y tiene un
sinnúmero de usos en la electrónica y los hay de diferentes valores. (Antonio
Bueno, s.f.).
Figura 58. Símbolo de resistencia variable
(Antonio Bueno, s.f.)
Este elemento en el banco simula el acelerador para controlar las
revoluciones tanto de entrada como de salida, también las temperaturas del
motor y del fluido de la trasmisión. (Antonio Bueno, s.f.).
85
2.5.5 OSCILADOR
Es un circuito indispensable para el funcionamiento del microcontrolador que
define la velocidad a la cual va a trabajar. (MikroElektronika, 2013).
Existen diferentes tipos de osciladores:
Oscilador LP: Oscilador de bajo consumo (Low Power).
Oscilador XT: Cristal / Resonador.
Oscilador HS: Oscilador de alta velocidad (High Speed).
Oscilador RC: Resistencia / Condensador.
Los Modos LP, XT y HS utilizan un oscilador externo como una fuente de
reloj cuya frecuencia está determinada por un cristal de cuarzo o por
resonadores
cerámicos
conectados
a
los
pines
OSC1
y
OSC2.
(MikroElektronika, 2013).
Figura 59. Cristal
2.5.6 CAPACITORES
El capacitor es un dispositivo eléctrico pasivo que permite almacenar energía
en forma de campo eléctrico y la unidad de medida son los faradios, en la
86
práctica se suele indicar la capacidad en micro- µF, nano- nF, o pico- pF
faradios, este dispositivo se carga de forma instantánea cuando se conecta a
una fuente de energía eléctrica, su descarga se produce de la misma
manera cuando se encuentra conectado a un circuito eléctrico o electrónico
energizado, si la carga almacenada no se emplea de inmediato este se auto
descarga en poco tiempo. (Antonio Bueno, s.f.).
Figura 60. Capacitores
(Antonio Bueno, s.f.)
Este elemento cumple la función de simular el solenoide PWM TCC.
2.5.7 PANTALLA LCD
Es un dispositivo para la presentación de imágenes o caracteres en el que
muestra 16 o 20 caracteres en 1, 2 o 4 líneas. Las funciones de control son
iguales para todos los modelos.
La operación del LCD es bastante sencilla ya que el microcontrolador
interno, hace casi todo el trabajo, para comandarlo debemos saber cómo
conectar sus pines, en el compilador tenemos una librería la cual habilita las
configuraciones y nos facilita el trabajo para hacer funcionar la LCD.
(MikroElektronika, 2013).
87
Figura 61. Pantalla LCD
(MikroElektronika, 2013)
Estas pantallas LCD van en el tablero de instrumentos para determinar las
revoluciones tanto de entrada como de salida, las temperaturas del motor y
del fluido de la transmisión, además del rango seleccionado y la marcha en
la que se encuentra. (MikroElektronika, 2013).
2.5.8 TRANSISTOR
El transistor es un dispositivo electrónico semiconductor utilizado para
producir una señal de salida en respuesta a otra señal de entrada. Cumple
funciones
de
amplificador,
oscilador,
conmutador
o
rectificador.
(Electronicafacil, 2004)
88
Figura 62. Transistor
(Electronicafacil, 2004)
2.5.8.1
Transistor Darlington
En electrónica, el transistor Darlington o
AMP es un dispositivo
semiconductor que combina dos transistores bipolares en un único
dispositivo. (wikipedia, 2014).
Figura 63. Transistor darlington
(Neuroscience and Robotics Lab, 2010)
Este transistor tiene una ganancia mucho mayor que un normal, pues se
multiplican las ganancias de los dos transistores, este tipo de transistores se
emplea donde se necesita controlar grandes cargas a corrientes muy
pequeñas. (wikipedia, 2014).
89
2.5.8.2
Transistor como interruptor
Cuando se aplica corriente a la base este se encuentra cerrado y cuando no
existe corriente en la base el interruptor está abierto.
2.5.8.3
Transistor como amplificador
Los físicos que descubrieron el transistor se dieron cuenta que mediante la
variación de una corriente débil aplicada a la base podían gobernar otra
mucho más intensa entre colector y emisor.
Esto significa que pequeñas corrientes eléctricas pueden ser amplificadas, o
lo que es lo mismo, que señales débiles pueden transformarse en otras
suficientemente fuertes.
La intensidad que atraviesa el emisor es igual a la intensidad que pasa por el
colector más la intensidad que pasa por la base. (Ángulo Usartegui, 2007).
Figura 64. Transistor como amplificador
Este elemento se usa en el banco didáctico para activar los relés debido a
que se lo utilizara como un amplificador de corriente.
90
2.5.9 RELÉ O RELEVADOR
Es un dispositivo electromecánico, que funciona como un interruptor
controlado por un circuito eléctrico en el que, por medio de una bobina y un
electroimán, se acciona un juego de uno o varios contactos que permiten
abrir o cerrar otros circuitos eléctricos independientes.
El electroimán hace bascular la armadura al ser excitada, cerrando los
contactos dependiendo de si es normalmente abierto o normalmente
cerrado. Si se le aplica un voltaje a la bobina se genera un campo
magnético, que provoca que los contactos hagan una conexión. Estos
contactos pueden ser considerados como el interruptor, que permite que la
corriente fluya entre los dos puntos que cerraron el circuito. (wikipedia, 2013).
Figura 65. Relés
(wikipedia, 2013).
Este elemento tiene la finalidad de manejar los voltajes de salida de los
solenoides debido a que se manejan voltaje de entre 0 a 12 voltios y el
microcontrolador trabaja en el rango de 0 a 5 voltios.
91
Otra utilidad de los relés en el banco es la activación de las luces piloto
instaladas en el tablero ya que trabajan a 110 voltios.
2.5.10 LUZ PILOTO
Es una luz que indica cual número o condiciones normales de un sistema o
dispositivo existe. Una luz piloto es también conocida como una luz monitor
o de monitor
Figura 66. Luz piloto
(wikipedia, 2013)
Este elemento simula los solenoides disponibles que se van a ir activando
dependiendo del rango y macha en la que se encuentre el banco didáctico,
la finalidad es observar los elementos que se activan, además de realizar
pruebas de voltaje con el multímetro.
2.5.11 SWITCH
Es un interruptor eléctrico que permite desviar o interrumpir el curso de una
corriente eléctrica.
92
Figura 67. Switchs
(wikipedia, 2013)
Con este elemento se simula, la palanca de cambios y el switch de freno.
2.5.12 DIODOS LED
Es un dispositivo semiconductor que emite luz de espectro reducido cuando
se polariza de forma directa, en la cual circula por él una corriente eléctrica.
Figura 68. Diodo led
(MikroElektronika, 2013)
93
3. METODOLOGÍA
3.1
DISEÑO Y ELABORACIÓN DEL BANCO DIDÁCTICO
3.1.1 PARTE MECÁNICA
3.1.1.1
Consideraciones preliminares
Para la elaboración del banco didáctico se procedió a diseñar un modelo de
estructura con la ayuda del programa AutoCad.
En la figura 69, figura 70, figura 71 y figura 72 se muestra el diseño de la
estructura previa a la elaboración.
Figura 69. Estructura Banco de Pruebas
Las dimensiones del banco se tomaron en cuenta dependiendo de la
necesidad de las distintas adecuaciones a realizarse, a continuación se
muestran distintas vistas con sus respectivas cotas en centímetros.
94
Figura 70. Estructura, Vista Superior
Figura 71. Estructura, Vista Lateral
95
Figura 72. Estructura, Vista Frontal
3.1.1.2
Materiales
Se utilizó tubo cuadrado de hierro de 20 x 20 x 0.8 mm, se escogió este tipo
debido a que la estructura que tiene que soportar es de poco peso, además
otra de las razones es la facilidad de corte de las partes para luego proceder
a soldar.
Se utilizó la suelda eléctrica SMAW con el electrodo E6011 por la facilidad
al momento de soldar, en cuanto a la resistencia se adoptó este electrodo
debido a que no se someterá a esfuerzos grandes ya que el peso que tiene
que soportar es el MDF de un espesor de 5.5 mm que vamos a utilizar para
forrar la estructura metálica, además de los elementos electrónicos que
tienen un peso de aproximadamente 3 libras.
96
3.1.1.3
Ensamblaje
Para desarrollar el banco didáctico se realizó algunos procedimientos como
el armado de la maqueta en donde van a ir montados todos los elementos
que simulan la transmisión automática.
Se procedió a realizar los cortes pertinentes observando el diseño elaborado
en AutoCAD como se muestra en la figura 73, se utilizó tubo cuadrado de
hierro de 20 x 20 x 0.8 mm.
Figura 73. Corte del Tubo para la Estructura
Una vez cortado las partes de la estructura se soldó con la suelda eléctrica
SMAW utilizando el electrodo E6013 como se muestra en la figura 74.
97
Figura 74. Soldada de la Estructura
Armada la estructura metálica se forró con MDF para pintar como se
muestra en la figura 75 y quedó listo para el montaje del banco.
Figura 75. Forrado con MDF de la Estructura
98
Una vez pintado y terminado la estructura se procede a la instalación de la
parte electrónica como se muestra en la figura 76.
Figura 76. Instalación de elementos electrónicos
3.1.2 PARTE ELECTRÓNICA
Con las condiciones de la transmisión automática se procedió a desarrollar
un diagrama de flujo para organizar la secuencia de programación del banco
didáctico, el diagrama ayudó a la elaboración del lenguaje de programación
en c para el programa PIC C Compiler, luego se compiló y una vez generado
el archivo .hex se grabó en el microcontrolador.
3.1.2.1
Diagrama de flujo del banco de pruebas
El diagrama de flujo desarrollado nos muestra la lógica para poder
desarrollar la programación del banco didáctico, como se muestra en el
anexo V.
99
3.1.2.2
Elementos utilizados en la elaboración del banco didáctico
Tabla 16. Elementos utilizados en la parte electrónica
ELEMENTO
LCD 4X20 BACKLIGHT AZUL
POTENCIOMETRO 100 KOHM
CRISTAL 20 Mhz
CAPACITOR CERAMICO 22pF
TRANSISTOR NPN 2N3906
RESISTENCIA 1/4W, DISTINTOS VALORES
RELE DPDT 8 PINES BOBINA 5VDC
MICROCONTROLADOR PIC 40 PINES
18F4550, 18F452
ZOCALO 40 PINES
POTENCIOMETRO 10K PARA PCB
TRANSISTOR DARLINGTON 3A PNP
LEDS 5MM
CONECTORES DE ESPADIN 40 PINES
HEMBRA
CONECTORES DE ESPADIN 40 PINES
MACHO
BORNERA 3 PINES 5MM
BORNERA 2 PINES 5MM
PUENTE DE DIODOS 600V 1.5A
CAPACITOR ELECTROLITICO 4700uF/25V
CAPACITOR ELECTROLITICO 10uF/25V
CAPACITOR CERAMICO 0.1uF/50V
DIODO 1N4148
7805
7812
BAQUELITA FIBRA DE VIDRIO 20X30
BROCA DE 0,79 mm (1/32")
BROCA DE 1.25 mm
TIP 411
CABLE UTP
BAUQLITA FIBRA DE VIDRIO 20X10
SWITCHS
CANTIDAD
1
4
2
4
20
40
14
1
2
2
7
10
2
2
3
31
1
2
3
4
22
2
2
1
4
4
1
1
1
8
100
3.1.2.3
Desarrollo del lenguaje de programación
La programación se realizó en el programa PIC C Compiler como se muestra
en la figura 77 debido a que es fácil de comprender y desarrollar, el lenguaje
de programación utilizado para el banco didáctico se muestra en el anexo II
y anexo III.
Figura 77. Programación en PIC C
3.1.2.4
Diseño en Proteus del banco didáctico
Con la ayuda del programa Proteus se simuló la programación realizada con
anterioridad en el programa Pic C Compiler, en la figura 78 se muestra la
simulación del circuito para de esta manera determinar fallas y poder
corregirlas antes de desarrollar el diseño final de la placa, con la simulación
se observa cómo se debería comportarse el diseño.
101
Figura 78. Simulación en ISIS de Proteus
Una vez comprobado que el programa funcionó de la manera esperada, se
armó el circuito en un protoboard para ver el comportamiento real del diseño,
como se muestra en la figura 79, en este paso ocurrió un problema que los
valores
que
daba
la
lectura
del
convertidor
análogo/digital
del
micronotrolador variaba mucho sus rango y no eran estables los valores,
para esto se colocó unos filtros a la salida de los potenciómetros con lo cual
se solucionó el problema.
102
Figura 79. Simulacion en protoboard
Para tener el diseño final de la placa hay que tener en cuenta que al
simularlo no es necesario tener los osciladores, las fuentes, es decir se
puede obviar ciertas partes, en el circuito final hay que colocar todos los
elementos necesarios y con esto se creó el diseño para la impresión de la
placa, se necesita una fuente de poder de computadora. Se organizó todos
los elementos necesarios para el funcionamiento de circuito real y se tomó
en cuenta las modificaciones como insertar los filtros antes de los
potenciómetros para evitar interferencias en la lectura de convertidor
análogo digital del microcontrolador, otro punto tomado en cuenta en el
diseño fue la instalación de las luces piloto, las bananas para poder medir
los voltajes utilizados en la electrónica de la trasmisión automática y el TCC
PWM por medio de un condensador cuando tenga que activarse el solenoide
TCC. En la figura 80 se muestra el diseño final en Proteus para diseñar las
placas de impresión del PCB.
103
Figura 80. Diagrama Final
3.1.2.5
Diseño de la placa de impresión
Una vez desarrollado y comprobado el correcto funcionamiento de la
simulación, con la ayuda del programa PCB Wizard se elaboró la placa del
circuito impreso como muestra la figura 81, figura 82 y figura 83, luego la
impresión se la realizó sobre una hoja de acetato en impresora láser para a
continuación proceder con la preparación de la placa en la baquelita como
se muestra en el anexo IV.
104
Figura 81. Diseño del PCB - 18F452
Figura 82. Diseno de la PCB - Potencia
105
Figura 83. Diseño de la PCB - 18F4550
3.2 BANCO DIDÁCTICO
3.2.1 FUNCIONABILIDAD Y MOVILIDAD
El banco didáctico fue elaborado y diseñado dependiendo de la
funcionalidad, se encuentra dividido en tres bloques que son el tablero de
observación para poder determinar qué elementos se activan al realizar las
practicas respectivas, tablero de pruebas en donde se tomara medidas de
voltajes y valores de las revoluciones al realizar cada una de las prácticas y
el tablero de control que es donde se controlara todo el funcionamiento del
banco, todo esto con la finalidad de capacitar a los estudiantes de Ingeniería
Automotriz.
106
En cuanto a la movilidad el banco no es de gran tamaño ni de gran peso,
además se ha colocado a la estructura sobre ruedas para facilitar el
desplazamiento del banco a cualquier posición.
3.2.2 PRUEBAS DE FUNCIONAMIENTO EN EL BANCO DIDÁCTICO
Primero se procedió a la instalación del circuito electrónico en el banco
didáctico como se muestra en la figura 84.
Figura 84. Circuito electrónico instalado
Una vez listo el banco didáctico se realizó las pruebas finales, la primera que
se realizó fue el funcionamiento de las pantallas LCDs, se verificó las
respuestas del tablero de control: la palanca de cambios, la activación del
switch de encendido, la variación de las revoluciones, la variación de las
temperaturas, y la activación del switch de freno, las pruebas realizadas se
muestran en la figura 85, figura 86, figura 87, figura 88 y figura 89.
107
Figura 85. Inicio del banco didáctico
Figura 86. Prueba de variación de temperatura
108
Figura 87. Prueba de switch de encendido, palanca de cambios
(1) Solenoide TCC
activado, sin
presionar freno (3).
1
(2) Solenoide TCC
desactivado, al
presionar freno (3).
2
3
Figura 88. Prueba switch de freno, rango 4 marcha 4
109
Figura 89. Prueba de variación de revoluciones
Una vez comprobado el funcionamiento de todo el tablero de control, se
procedió hacer pruebas sobre las activación de las luces del tablero de
observación, verificando su correcto funcionamiento como se muestra en la
figura 90, figura 91, figura 92 y figura 93.
Figura 90. Rango 4 - marcha 1
110
Figura 91. Rango 4 - marcha 2
Figura 92. Rango 4 - marcha 3
111
Figura 93. Rango 4 - marcha 4
Otra prueba fue a las luces de los conmutadores de marchas y lógica de los
switchs que depende del rango seleccionado por la palanca de cambios, las
pruebas realizadas se muestran en la figura 94, figura 95, figura 96, figura
97, figura 98 y figura 99.
Figura 94. Rango park y rango neutro
112
Figura 95. Rango reversa
Figura 96. Rango overdrive
113
Figura 97. Rango 3
Figura 98. Rango 2
114
Figura 99. Rango 1
Para finalizar las pruebas en el banco didáctico se tomó mediciones con el
multímetro para determinar si los voltajes que se tienen en los terminales de
los solenoides como de los conmutadores de marchas son las correctas a
las indicadas en las condiciones del marco teórico.
El solenoide S(1-2) dió como resultado cuando está activado 12.34v y
desactivado marco 0,65v, como se muestra en la figura 100.
Figura 100. Prueba multímetro - S(1-2)
115
El solenoide S(2-3) dió como resultado cuando está activado 12.37v y
desactivado marco 0,64v, como se muestra en la figura 101.
Figura 101. Prueba multímetro - S(2-3)
El solenoide SC(3-2) dió como resultado cuando está activado 12.36v y
desactivado marco 0,64v, como se muestra en la figura 102.
Figura 102. Prueba multímetro - SC(3-2)
116
El solenoide PCS cuando está en rangos park, reversa, neutro y marchas 1 y
2 dió como resultado 5,10v, mientras que cuando está en marchas 3 y 4
marcaba un voltaje de 2.01v, como se muestra en la figura 103.
Figura 103. Prueba multímetro – PCS
El solenoide TCC dió como resultado cuando está activado 12.34v y
desactivado marco 0,65v, como se muestra en la figura 104.
Figura 104. Prueba multímetro - TCC
117
El conmutador de marcha 1 dió como resultado cuando no está anclado a
masa 12.36v y desactivado marco 0,64v, como se muestra en la figura 105.
Figura 105. Prueba multímetro - Conmutador de marcha 1
El conmutador de marcha 2 dió como resultado cuando no está anclado a
masa 12.36v y desactivado marco 0,64v, como se muestra en la figura 106.
Figura 106. Prueba multímetro - Conmutador de marcha 2
118
El conmutador de marcha 3 dió como resultado cuando no está anclado a
masa 12.37v y desactivado marco 0,64v, como se muestra en la figura 107.
Figura 107. Prueba multímetro - Conmutador de marcha 3
3.2.3 MANUAL DE FUNCIONAMIENTO DEL BANCO DIDÁCTICO
Las partes que conforma en banco didáctico se muestran en la figura 108,
figura 109, figura 110, figura, 111 y figura 112.
119
TABLERO DE
OBSERVACIÓN
TABLERO DE
PRUEBAS
TABLERO DE
CONTROL
Figura 108. Partes generales del banco didáctico
120
FUENTE DE
ALIMENTACIÓN
(PARTE POSTERIOR)
Figura 109. Parte posterior del banco didáctico
LCD 1
LCD 2
Figura 110. Partes del tablero de pruebas
121
1
2
3
4
5
6
Figura 111. Partes del tablero de control
TABLERO DE
OBSERVACIÓN
Figura 112. Partes del tablero de observación
Encender la fuente de alimentación.
Girar las perillas RPM IN/OUT (3), ECT (4), TFT (5) completamente
hacia la izquierda.
Colocar la palanca de cambios (1) en rango parking o neutral, el
rango seleccionado se mostrara en la LCD 1 del tablero de pruebas.
Girar el switch de llave (2) hacia la derecha para encender el banco.
122
Visualizar en la LCD 1 que las revoluciones de entrada sean 700 rpm,
para empezar a realizar prácticas en el banco didáctico.
Colocar la temperatura del motor en 90°C con la perilla ECT (4) que
es la temperatura normal de funcionamiento, la temperatura se
visualiza en la LCD 2.
Colocar la temperatura del fluido de la transmisión entre 90 y 100°C
con la perilla
TFT (5) que es la temperatura normal de
funcionamiento, la temperatura se visualiza en la LCD 2.
Colocar la palanca de cambios (1) en los rangos disponibles: parking,
reversa, neutro, 4, 3, 2, 1, estos rangos se muestran en la LCD 1.
En el tablero de observación ver la activación de los conmutadores de
marchas con su respectiva lógica de switchs que varía al mover la
palanca de cambios (1) en los rangos disponibles.
Variar las rpm de entrada y de salida con la perilla RPM IN/OUT (3)
en los rangos disponibles, estos rangos se visualizan en la LCD 1,
para cambiar de rango mover primero la perilla RPM IN/OUT (3)
completamente hacia la izquierda y luego mover la palanca de
cambios (1).
Para los rangos 4, 3, 2 realizar el mismo procedimiento que en el
literal anterior, en estos rangos existe el cambio de marcha para esto
aumentar el valor de las revoluciones moviendo la perilla RPM
IN/OUT (3), el cambio de marcha se visualiza en la LCD 1.
En el tablero de observación ver la activación de la parte electrónica
que se acciona al mover la palanca de cambios (1) en los rangos
disponibles, además observar el comportamiento del banco con el
cambio de marchas que se produce al aumentar el valor de las
revoluciones moviendo la perilla RPM IN/OUT (3) en los rangos 4, 3, 2
En el tablero de pruebas con un multímetro medir los voltajes de
activación de los conmutadores de marchas poniendo el común del
multímetro en el terminal de masa y el otro extremo del multímetro
colocar uno a uno en los terminales 1, 2, y 3 del tablero de pruebas,
123
hacer estas mediciones en cada uno de los rangos disponibles en el
banco.
En el tablero de pruebas con un multímetro medir los voltajes de
activación de los solenoides poniendo el común del multímetro en el
terminal de masa y el otro extremo del multímetro colocar uno a uno
en los terminales de los distintos solenoides del tablero de pruebas,
hacer estas mediciones en cada uno de los rangos disponibles en el
banco, también realizar la medición de voltajes para los rangos 4, 3, 2
en cada una de las marchas que se cambie al aumentar el valor de
las revoluciones con la perilla RPM IN/OUT (3), el cambio de marcha
se visualiza en la LCD 1.
Seleccionar con la palanca de cambios (1) el rango 4, aumentar el
valor de las revoluciones con la perilla RPM IN/OUT (3) para obtener
el cambio de las diferentes marchas que se visualiza en la LCD 1,
cuando la marcha este en cuarta oprimir el pulsador de freno (6) del
tablero de control y observar que sucede en la parte electrónica del
tablero de observación.
Seleccionar con la palanca de cambios (1) el rango 4, aumentar el
valor de las revoluciones con la perilla RPM IN/OUT (3) para obtener
el cambio de las diferentes marchas que se visualiza en la LCD 1,
cuando la marcha este en cuarta, variar primero el control de la
temperatura del ECT (4) a una temperatura inferior a los 20°C
observar lo que sucede en la parte electrónica del tablero de
observación,
luego
dejarlo
en
la
temperatura
normal
de
funcionamiento, a continuación variar el TFT (5) a una temperatura
inferior a los 30°C, observar que sucede en la parte electrónica del
tablero de observación y dejarlo en la temperatura normal de
funcionamiento.
Seleccionar con la palanca de cambios (1) el rango 4, aumentar el
valor de las revoluciones moviendo la perilla RPM IN/OUT (3) para
obtener el cambio de las diferentes marchas que se visualiza en la
LCD 1, cuando la marcha este en tercera, variar el control de la
124
temperatura del ECT (4) del tablero de control a una temperatura
inferior a los 20°C y el TFT (5) a una temperatura normal de
funcionamiento, observar lo que sucede en la parte electrónica del
tablero de observación.
Seleccionar con la palanca de cambios (1) el rango 4, aumentar el
valor de las revoluciones con la perilla RPM IN/OUT (3) para obtener
el cambio de las diferentes marchas que se visualiza en la LCD 1,
cuando la marcha este en tercera, variar el control de la temperatura
del ECT (4) del tablero de control a una temperatura normal de
funcionamiento y el TFT (5) en a una temperatura superior a 135°C,
observar lo que sucede en la parte electrónica del tablero de
observación.
Seleccionar con la palanca de cambios (1) el rango 3, aumentar el
valor de las revoluciones con la perilla RPM IN/OUT (3) para obtener
el cambio de las diferentes marchas que se visualiza en la LCD 1,
cuando la marcha este en tercera realizar los mismos procedimientos
de las variaciones de temperatura de los dos literales anteriores.
NOTA:
Al accionar el freno las revoluciones no disminuirán
debido a que se trata de una simulación, la finalidad es
tener presente las condiciones que cumple el freno en el
comportamiento electrónico de la caja de cambios
automática.
Accionar el pulsador de freno (6) siempre que se active
el solenoide TCC y observar que sucede en la parte
electrónica del tablero de observación.
3.3 GUÍAS DE LABORATORIO
125
PRACTICA # 1
TITULO: Banco Didáctico de Caja de Cambios Automática.
Objetivos:
Comprender el funcionamiento eléctrico, electrónico y de control de
una caja de cambios automática, por medio de la visualización de
los elementos electrónicos que se accionan en cada rango de
marchas.
Bases conceptuales
SOLENOIDE 1-2(A), 2-3 (B)
Son todos normalmente abiertos y sirven para controlar los cambios ascendentes y
descendentes de marchas.
SOLENOIDE DE CONTROL 3-2
Es normalmente cerrado y sirva para controlar el cambio descendente de marcha.
SOLENOIDE DE CONTROL DE PRESIÓN (PCS)
Se controla mediante la corriente suministrada en la que el rango va desde 0 a 1.1
amperios, donde 0 es la máxima presión y 1.1 la mínima presión, en condiciones
generales en los rangos 1 – 2 – P – R – N, trabaja a 0.5 amperios – 2 voltios y en
rangos de 3 – 4 trabajan a 1.1 amperios – 5 voltios.
SOLENOIDE TCC
Es normalmente abierto y cuando este se aplica el motor gira a la misma velocidad
del convertidor.
126
SOLENOIDE PWM TCC
La válvula de solenoide PWM TCC es un ancho de pulso modulado que se utiliza
para controlar la aplicación y liberación, del embrague del convertidor además sirve
para controlar la velocidad de aplicación del TCC y la liberación.
CONMUTADORES DE MARCHAS
Los conmutadores de presión de marchas (PSA) se unen al cuerpo de válvulas, se
componen de 5 interruptores y se utiliza para señalar la posición de la válvula
manual de la palanca de cambios. Varios fluidos se encuentran en el PSA en
función de la posición de la válvula manual, estos fluidos abren y cierran los
interruptores de presión de fluido en la PSA para proporcionar una señal al PCM
que indica la posición de la gama seleccionada de la válvula manual. La
combinación de interruptores abiertos y cerrados determina el voltaje medido en
cada uno de los tres pasadores en el conector eléctrico del PSA. Un circuito abierto
mide 12 voltios, mientras que un circuito conectado a tierra mide 0 voltios.
Material
Banco didáctico de simulación de la caja de transmisión automática.
Procedimiento
Encender la fuente de alimentación.
Girar las perillas RPM IN/OUT (3), ECT (4), TFT (5) completamente hacia la
izquierda.
Colocar la palanca de cambios (1) en rango parking o neutral, el rango
seleccionado se mostrara en la LCD 1 del tablero de pruebas.
127
Girar el switch de llave (2) hacia la derecha para encender el banco.
Visualizar en la LCD 1 que las revoluciones de entrada sean 700 rpm, para
empezar a realizar prácticas en el banco didáctico.
Colocar la temperatura del motor en 90°C con la perilla ECT (4) que es la
temperatura normal de funcionamiento, la temperatura se visualiza en la LCD
2.
Colocar la temperatura del fluido de la transmisión entre 90 y 100°C con la
perilla
TFT (5) que es la temperatura normal de funcionamiento, la
temperatura se visualiza en la LCD 2.
Colocar la palanca de cambios (1) en los rangos disponibles: parking,
reversa, neutro, 4, 3, 2, 1, estos rangos se muestran en la LCD 1.
En el tablero de observación ver la activación de los conmutadores de
marchas con su respectiva lógica de switchs que varía al mover la palanca
de cambios (1) en los rangos disponibles.
Variar las rpm de entrada y salida con la perilla RPM IN/OUT (3) en los
diferentes rangos, estos rangos se visualizan en la LCD 1, para cambiar de
rango primero mover la perilla RPM IN/OUT (3) completamente hacia la
izquierda, luego seleccionar el rango moviendo la palanca de cambios (1).
Para los rangos 4, 3, 2 realizar el mismo procedimiento que en el literal
anterior, en estos rangos existe el cambio de marcha al ir aumentado el valor
de las revoluciones con la perilla RPM IN/OUT (3), el cambio de marcha se
visualiza en la LCD 1.
En el tablero de observación ver la activación de la parte electrónica que se
acciona al mover la palanca de cambios (1) en los rangos disponibles,
además observar el comportamiento del banco con el cambio de marchas
que se produce al aumentar el valor de la RPM IN/OUT (3) en los rangos 4,
3, 2.
128
Cuestionario de Investigación
1. Completar la siguiente tabla de los elementos electrónicos.
RANGO
MARCHA
SOLENOIDES DE
DESPLAZAMIENTO
A (1-2)
B (2-3)
TCC
SOLENOIDE
NO
TCC PWM
C
N
SOLENOIDE
DE CONTROL
DE PRESION
SOLENOIDE
DE CONTROL
(3-2) N C
SUBIDA
SOLENOIDE
DE CONTROL
(3-2) N C
BAJADA
PARK
REVERSE
NEUTRO
1
OVERDRIVE
2
3
4
1
DRIVE
2
3
2
1
1
2
1
129
2. Completarla siguiente tabla de los conmutadores de marchas.
Bibliografía
General Motors, C. (1992). GM Hydra-Matic 4L60-E Transmission
Technician Guide. U.S.A.: GM Powertrain Division Copyright.
130
PRACTICA # 2
TITULO: Banco Didáctico de Caja de Cambios Automática.
Objetivos:
Determinar el voltaje de cada uno de los elementos electrónicos
del banco para su accionamiento.
Identificar la combinación de la lógica de los switchs en los rangos
disponibles.
Bases conceptuales
SOLENOIDE DE CONTROL 3-2
Es normalmente cerrado y sirva para controlar el cambio descendente de
marcha.
SOLENOIDE 1-2(A), 2-3 (B)
Son todos normalmente abiertos y sirven para controlar los cambios
ascendentes y descendentes de marchas.
SOLENOIDE DE CONTROL DE PRESIÓN (PCS)
Se controla mediante la corriente suministrada en la que el rango va desde 0
a 1.1 amperios, donde 0 es la máxima presión y 1.1 la mínima presión, en
condiciones generales en los rangos 1 – 2 – P – R – N, trabaja a 0.5
amperios – 2 voltios y en rangos de 3 – 4 trabajan a 1.1 amperios – 5 voltios.
SOLENOIDE TCC
Es normalmente abierto y cuando este se aplica el motor gira a la misma
velocidad del convertidor.
131
SOLENOIDE PWM TCC
La válvula de solenoide PWM TCC es un ancho de pulso modulado que se
utiliza para controlar la aplicación y liberación, del embrague del convertidor
además sirve para controlar la velocidad de aplicación del TCC y la
liberación.
LOS CONMUTADORES DE MARCHAS
Los conmutadores de marchas (PSA), se componen de 5 interruptores y se
utiliza para señalar la posición de la válvula manual de la palanca de
cambios.
Estos interruptores proporcionan una señal al PCM que indica la posición del
rango de marcha seleccionado de la válvula manual. Un circuito abierto mide
12 voltios, mientras que un circuito conectado a tierra mide 0 voltios.
Material
Banco didáctico de simulación de la caja de transmisión automática.
Multímetro.
Procedimiento
Encender la fuente de alimentación.
Girar las perillas RPM IN/OUT (3), ECT (4), TFT (5) completamente
hacia la izquierda.
Colocar la palanca de cambios (1) en rango parking o neutral, el rango
seleccionado se mostrará en la LCD 1 del tablero de pruebas.
Girar el switch de llave (2) hacia la derecha para encender el banco.
Visualizar en la LCD 1 que las revoluciones de entrada sean 700 rpm,
132
para empezar a realizar prácticas en el banco didáctico.
Colocar la temperatura del motor en 90°C con la perilla ECT (4) que
es la temperatura normal de funcionamiento, la temperatura se
visualiza en la LCD 2.
Colocar la temperatura del fluido de la transmisión entre 90 y 100°C
con la perilla
TFT (5) que es la temperatura normal de
funcionamiento, la temperatura se visualiza en la LCD 2.
Colocar la palanca de cambios (1) en los rangos disponibles: parking,
reversa, neutro, 4, 3, 2, 1, estos rangos se muestran en la LCD 1.
En el tablero de observación ver la activación de los conmutadores de
marchas con su respectiva lógica de switchs que varía al mover la
palanca de cambios (1) en los rangos disponibles.
Variar las rpm de entrada y de salida con la perilla RPM IN/OUT (3) en
los diferentes rangos, estos rangos se visualizan en la LCD 1, para
cambiar de rango primero mover la perilla RPM IN/OUT (3)
completamente hacia la izquierda, luego seleccionar el rango
moviendo la palanca de cambios (1).
Para los rangos 4, 3, 2 realizar el mismo procedimiento que en el
literal anterior, en estos rangos existe el cambio de marcha al
aumentar las revoluciones al mover la perilla RPM IN/OUT (3), el
cambio de marcha se visualiza en la LCD 1.
En el tablero de observación ver la activación de la parte electrónica
que se acciona al mover la palanca de cambios (1) en los rangos
disponibles, además varía con el cambio de marchas que se produce
al aumentar el valor de las revoluciones moviendo la perilla RPM
IN/OUT (3) en los rangos 4, 3, 2.
En el tablero de pruebas con un multímetro medir los voltajes de
activación de los conmutadores de marchas poniendo el común del
multímetro en el terminal de masa y el otro extremo del multímetro
133
colocar uno a uno en los terminales del tablero de pruebas, hacer
estas mediciones en cada uno de los rangos disponibles en el banco.
En el tablero de pruebas con un multímetro medir los voltajes de
activación de los solenoides poniendo el común del multímetro en el
terminal de masa y el otro extremo del multímetro colocar uno a uno
en los terminales de los distintos solenoides del tablero de pruebas,
hacer estas mediciones en cada uno de los rangos disponibles en el
banco, también realizar la medición de voltajes para los rangos 4, 3, 2
en cada una de las marchas que cambia al ir aumentado el valor de
las revoluciones al mover la perilla RPM IN/OUT (3), el cambio de
marcha se visualiza en la LCD 1.
134
Cuestionario de Investigación
1. Completar la siguiente tabla de los voltajes manejados a los
solenoides y conmutadores de marchas.
ELEMENTO
VOLTAJE
1-2 SOLENOIDE (LOW)
2-3 SOLENOIDE (LOW)
SOLENOIDE DE CONTROL DE PRESIÓN (LOW)
TFT (LOW)
3-2 SOLENOIDE DE CONTROL (LOW)
SOLENOIDE TCC PWM (LOW)
SOLENOIDE TCC (LOW)
1-2 SOLENOIDE (HIGH)
2-3 SOLENOIDE (HIGH)
SOLENOIDE DE CONTROL DE PRESIÓN (HIGH)
TFT (HIGH)
3-2 SOLENOIDE DE CONTROL (HIGH)
SOLENOIDE TCC PWM (HIGH)
SOLENOIDE TCC (HIGH)
LOW = CERO VOLTIOS , HIGH = VOLTAJE DE ACTIVACIÓN
135
2. Completarla siguiente tabla de la lógica de los switchs de marchas.
Bibliografía
General Motors, C. (1992). GM Hydra-Matic 4L60-E Transmission
Technician Guide. U.S.A.: GM Powertrain Division Copyright.
136
PRACTICA # 3
TITULO: Banco Didáctico de Caja de Cambios Automática.
Objetivos:
Analizar la influencia de la temperatura del motor, temperatura del
fluido de la transmisión y el freno, sobre el sistema electrónico de
la caja de cambios automática.
Bases conceptuales
LOS CONMUTADORES DE MARCHAS
Los conmutadores de marchas (PSA), se componen de 5 interruptores y se
utiliza para señalar la posición de la válvula manual de la palanca de
cambios.
Estos interruptores proporcionan una señal al PCM que indica la posición del
rango de marcha seleccionado de la válvula manual. Un circuito abierto mide
12 voltios, mientras que un circuito conectado a tierra mide 0 voltios
SENSOR DE TEMPERATURA DEL FLUIDO DE LA TRANSMISIÓN (TFT)
Sirve de ayuda para el control del solenoide TCC, es un termistor de tipo
NPN.
Tiene una señal de referencia de 5 voltios y la señal de salida varía
dependiendo de la temperatura del fluido.
SENSOR DE TEMPERATURA DEL MOTOR (ECT)
Controla la temperatura del motor para de esta manera determinar la
aplicación del TCC.
137
CONMUTADOR DE FRENO
Este normalmente se encuentra cerrado cuando el pedal de freno no está
accionado, pero cuando se pisa el pedal de frenos el conmutador se abre
cortando la señal eléctrica que va a la PCM, esta señal se utiliza para control
de la transmisión.
Material
Banco didáctico de simulación de la caja de transmisión automática.
Procedimiento
Encender la fuente de alimentación.
Girar las perillas RPM IN/OUT (3), ECT (4), TFT (5) completamente
hacia la izquierda.
Colocar la palanca de cambios (1) en rango parking o neutral, el rango
seleccionado se mostrara en la LCD 1 del tablero de pruebas.
Girar el switch de llave (2) hacia la derecha para encender el banco.
Visualizar en la LCD 1 que las revoluciones de entrada sean 700 rpm,
para empezar a realizar prácticas en el banco didáctico.
Colocar la temperatura del motor en 90°C con la perilla ECT (4) que
es la temperatura normal de funcionamiento, la temperatura se
visualiza en la LCD 2.
Colocar la temperatura del fluido de la transmisión entre 90 y 100°C
con la perilla
TFT (5) que es la temperatura normal de
funcionamiento, la temperatura se visualiza en la LCD 2.
Seleccionar con la palanca de cambios (1) el rango 4, aumentar el
valor de las revoluciones moviendo la perilla RPM IN/OUT (3) para
obtener el cambio de las diferentes marchas que se visualiza en la
LCD 1, cuando la marcha este en cuarta oprimir el pulsador de freno
138
(6) del tablero de control y observar que sucede en la parte electrónica
del tablero de observación.
Seleccionar con la palanca de cambios (1) el rango 4, aumentar el
valor de las revoluciones moviendo la perilla RPM IN/OUT (3) para
obtener el cambio de las diferentes marchas que se visualiza en la
LCD 1, cuando la marcha este en cuarta, variar primero el control de
la temperatura del ECT (4) a una temperatura inferior a los 20°C
observar lo que sucede en la parte electrónica del tablero de
observación,
luego
dejarlo
en
la
temperatura
normal
de
funcionamiento, a continuación variar el TFT (5) a una temperatura
inferior a los 30°C, observar lo que sucede en la parte electrónica del
tablero de observación y dejarlo en la temperatura normal de
funcionamiento.
Seleccionar con la palanca de cambios (1) el rango 4, aumentar el
valor de las revoluciones moviendo la perilla RPM IN/OUT (3) para
obtener el cambio de las diferentes marchas que se visualiza en la
LCD 1, cuando la marcha este en tercera, variar el control de la
temperatura del ECT (4) del tablero de control a una temperatura
inferior a los 20°C y el TFT (5) a una temperatura normal de
funcionamiento, observar lo que sucede en la parte electrónica del
tablero de observación.
Seleccionar con la palanca de cambios (1) el rango 4, aumentar el
valor de las revoluciones moviendo la perilla RPM IN/OUT (3) para
obtener el cambio de las diferentes marchas que se visualiza en la
LCD 1, cuando la marcha este en tercera, variar el control de la
temperatura del ECT (4) del tablero de control a una temperatura
normal de funcionamiento y el TFT (5) en a una temperatura superior
a 135°C, observar lo que sucede en la parte electrónica del tablero de
observación.
139
Seleccionar con la palanca de cambios (1) el rango 3, aumentar el
valor de las revoluciones moviendo la perilla RPM IN/OUT (3) para
obtener el cambio de las diferentes marchas que se visualiza en la
LCD 1, cuando la marcha este en tercera realizar los mismos
procedimientos de las variaciones de temperatura de los dos literales
anteriores.
Accionar el pulsador de freno (6) siempre que se active el solenoide
TCC, para verificar lo que sucede en la parte electrónica del tablero de
observación.
Cuestionario de Investigación
1 Determinar la influencia de los valores de temperatura y el
accionamiento del freno en la electrónica del banco didáctico.
(Determinar Condiciones).
Bibliografía
General Motors, C. (1992). GM Hydra-Matic 4L60-E Transmission
Technician Guide. U.S.A.: GM Powertrain Division Copyright.
140
4. ANÁLISIS DE RESULTADOS
El análisis realizado a la caja de cambios automática 4L60E de General
Motors ayudó a determinar las entradas indispensables que toma en cuenta
la PCM para la activación de los distintos elementos electrónicos que
comandan la transmisión automática.
La palanca de cambios es simulada con un switch de siete posiciones que
fue difícil de encontrar y que retardó el proceso de ensamblaje de la parte
electrónica del banco didáctico, el mismo dio problemas por una mala
conexión de la línea de neutro, en la figura 113 se muestra el switch.
Figura 113. Switch de palanca de cambios
Para tener las revoluciones tanto de entrada y a partir de estas escalonar en
la programación las revoluciones de salida se remplazó el potenciómetro de
10 kΩ de media vuelta por un potenciómetro lineal de 10 vueltas industrial
con valor resistivo de 5 kΩ porque se tiene una mejor lectura del convertidor
análogo/digital del microcontrolador debido al amplio rango de revoluciones
simulados, el potenciómetro industrial utilizado se muestra en la figura 114.
141
Figura 114. Potenciómetro industrial
Para la simulación de los sensores TFT (sensor de temperatura del fluido de
la transmisión) y ECT (sensor de temperatura del motor) se utilizó los
potenciómetros de media vuelta porque los rangos de temperatura
simulados son pequeños.
En cuanto a la alimentación del circuito en un principio se utilizaba una
fuente que utilizaba un transformador de 110 a 12 voltios de 3 amperes, la
misma que tenía que repartir la intensidad de corriente a las tres placas del
circuito electrónico y no abastecía, por lo que fue remplazada por una fuente
de poder de computadora que posee varias salidas de voltaje con una
intensidad de 3 amperes para cada una, con lo que se tiene la corriente y
potencia necesaria para el funcionamiento correcto del circuito, en la figura
115 se muestra la fuente de poder utilizada.
142
Figura 115. Fuente de poder
En la figura 116 se observa la fuente que se suprimió y la conexión directa
de la primera placa, en la figura 117 y figura 118 se muestra la conexión
directa a las otras dos placas.
Conexión del
transformador
(fuente)
Conexión directa de
la fuente de poder
Figura 116. Placa PCB 1
143
Conexión directa de
5v
Conexión directa de
Masa
Figura 117. Placa PCB 2
Conexión directa de
5v
Conexión directa de
12 v
Figura 118. Placa PCB 3
144
5. CONCLUSIONES Y RECOMENDACIONES
5.1
CONCLUSIONES:
Mediante la investigación realizada se pudo elaborar el banco
didáctico del control electrónico, eléctrico y control de la transmisión
automática, con lo que se logró conocer que la electrónica facilita el
control de elementos tanto mecánicos como hidráulicos.
Investigando el funcionamiento electrónico de las transmisiones
automáticas se comprendió que para tomar decisiones la PCM
depende de distintos sensores y para elaborar el banco didáctico se
tomó en cuenta tanto el MAP como el TPS que tienen relación con las
revoluciones de entrada y carga del motor, el sensor de velocidad de
salida, sensores de temperatura TFT y ECT.
Con la recopilación de información se logró desarrollar un diagrama
de flujo de funcionamiento que facilitó elaborar la programación en el
programa PIC COMPILER.
Se ha tomado como referencia el modelo 4L60E de General Motors
Company y con la ayuda del manual técnico se identificó las
condiciones para delimitar el funcionamiento del banco didáctico.
La transmisión automática es controlada por la PCM en la cual vienen
programadas las revoluciones tanto de entrada y salida para según
esto determinar el momento exacto el cambio de marcha.
La Transmisión Automática se compone de tres grandes bloques la
parte mecánica, hidráulica y la de control electrónico que a su vez es
la que comanda o determina el funcionamiento de la trasmisión en
general.
145
5.2
RECOMENDACIONES:
Para realizar las practicas se recomienda tener conocimientos sobre
el funcionamiento mecánico e hidráulico de la transmisión automática
especialmente del modelo 4L60E de General Motors.
Se recomienda limpiar la superficie del banco didáctico con paños
húmedos de agua evitando el contacto con otro tipo de líquidos.
Se recomienda al momento de transportarlo no hacerlo con
movimientos duros y siempre de manera vertical.
Para trabajos futuros sobre este banco didáctico se podría aumentar
un tablero didáctico de observación que indique el funcionamiento
tanto la parte hidráulica como mecánica.
En caso de cambiar la fuente de poder, hacerlo con una fuente de
computadora de 500w de potencia.
Cuando el potenciómetro de las revoluciones de entrada y salida de
lecturas defectuosas cambiarlo por un potenciómetro industrial lineal
de diez vueltas con valor resistivo de 5kΩ.
Al momento de presentarse problemas con la selección de los rangos,
revisar las conexiones del switch de la palanca de cambios del banco
didáctico.
146
GLOSARIO DE TÉRMINOS
ECT
Sensor de temperatura del refrigerante del motor.
TFT
Sensor de temperatura del fluido de la transmisión.
SCP – PCS
Solenoide de control de presión.
CKP
Sensor de posición del cigüeñal.
PCM
Módulo de control del tren motriz.
MAP
Sensor de presión absoluta del múltiple de admisión.
PWM
Modulación por ancho de pulsos.
TCC
Solenoide de embrague del convertidor de par-torque.
147
BIBLIOGRAFÍA
Ángulo Usartegui, J. M. (2007). Microcontroladores PIC: Diseño
práctico de aplicaciones. Madrid: McGraw-Hill.
Gutiérrez Manrique, Nilcer. (2006). Mecánica automotriz. Lima:
Palomino.
Noboru Miyadaira, Alberto. (2009). Microcontroladores PIC 18. Sao
Paulo: ÉRICA.
Hans Kindler. (1986). Matemática aplicada para la técnica del
automóvil (8a. ed.). Barcelona: Editorial Reverte (GTZ).
Gil, Hermógenes. (2007). Manual de diagnóstico del automóvil.
Bogotá: CEAC.
ATSG. (1993). Automatic Transmission Service Group. Miami:
Copyright ATSG.
Bosh GmbH, R. (2002). Microelectrónica en el vehículo motorizado
(Ed. Traducida al español). Alemania: s.e..
Brejcha M. (1978). Los cambios automáticos. España : Reverté.
Ceac. (2003). Manual Ceac del automóvil. España: Ediciones Ceac.
Ferrer J. y Domínguez, E. (2008). Sistemas de transmisión y frenado.
España: Editex.
General Motors, C. (1992). GM Hydra-Matic 4L60-E Transmission
Technician Guide. U.S.A.: GM Powertrain Division Copyright.
José Manuel, A. (2001). Sistemas de transmisión y frenado. Madrid:
Paraninfo.
148
Thomson, W. (1985). Temática automotriz Tomo V: Sistemas de
transmisión en el automóvil. Madrid: Paraninfo.
Valbuena Rodríguez y Oscar. (2008). Manual de mantenimiento y
reparación de vehículos - Tomo 3. Bogotá: Alfaomega.
Aficionados a la mecanica. (s.f. de 2013). Recuperado el 12 de
noviembre de 2013, de http://www.aficionadosalamecanica.net/cajacambios3.htm.
Antonio Bueno, A. (s.f.). Portal Electrónica Básica. Recuperado el 6
de
enero
de
2014,
de
http://www.portaleso.com/usuarios/Toni/web_electronica_3/electronica
_indice.html.
Divassón, F. B. (s.f. de 2011). TECNOMOVIL. Recuperado el 9 de
diciembre
de
2013
,
de
http://www.tecnomovil.com/Cursos-
formacion/Cambio%20Automatico%20II/Curso-caja-cambioII.htm.
Electronicafacil. (2004). Recuperado el 17 de diciembre de 2013, de
http://www.electronicafacil.net/tutoriales/El-transistor.php.
MikroElektronika. (s.f. de 2013). MikroElektronika. Recuperado el 2 de
diciembre
de
2013,
de
MikroElektronika:
http://www.mikroe.com/chapters/view/82/capitulo-4-ejemplos/.
Neuroscience
and
Robotics
Lab.
(11
de
enero
de
2010).
Neuroscience and Robotics Lab. Recuperado el 8 de enero de 2014,
de
http://hades.mech.northwestern.edu/index.php/Diodes_and_Transistor
s.
149
QuimiNet. (9 de junio de 2008 ). QuimiNet . Recuperado el 23 de
noviembre de 2013, de http://www.quiminet.com/articulos/principiodel-funcionamiento-de-las-bombas-de-engranajes-30476.htm.
Transpart S.A. (s.f.). Transpart S.A. Recuperado el 27 de noviembre
de 2013, de http://www.transpart.com/7.html.
Universidad Catolica del Norte. (s.f. de s.f.). CeducUCN. Recuperado
el
12
de
noviembre
de
2013,
de
http://www.ceduc.cl/aula/cqbo/materiales/ME/ME470/A/material%20para%20cuestonario.pdf.
Universidad Tecnológica del Perú. (s.f. de s.f.). Aula virtual UTP.
Recuperado
el
23
de
noviembre
de
2013,
de
http://aulavirtual.utp.edu.pe/file/20101/IT/R4/01/I124/20101ITR401I12
4T022.pdf.
Widman. (s.f. de 2007). Recuperado el 12 de noviembre de 2013, de
http://www.widman.biz/boletines/50.html.
wikipedia. (diciembre de 2013). Recuperado el 19 de diciembre de
2013, de http://es.wikipedia.org/wiki/Rel%C3%A9.
wikipedia. (8 de diciembre de 2013). Recuperado el 9 de diciembre de
2013, de http://en.wikipedia.org/wiki/Switch.
wikipedia. (s.f. de diciembre de 2013). wikipedia. Recuperado el 6 de
enero
de
2014,
de
http://es.wikipedia.org/wiki/Codificaci%C3%B3n_de_colores.
wikipedia. (enero de 2014). Recuperado el 7 de enero de 2014, de
wikipedia: http://es.wikipedia.org/wiki/Transistor_Darlington.
150
ANEXOS
Anexo I
Instrumentos utilizados para la elaboración de la
estructura del banco didáctico
1.1 Máquina Soldadora de Corriente Alterna
Lincoln Electric AC-225 GLM
La AC-225 GLM está diseñada para facilitar el trabajo en cientos de
proyectos de soldadura con electrodo revestido. Es el equipo ideal para
efectuar soldaduras ligeras de fabricación, construcción y reparación. Fue
desarrollada para soldar con electrodos E6011 y E6013 en diámetros de
3/32" (2,4 mm); 1/8" (3,2 mm); y, 5/32" (4,0 mm), así como con electrodos
7018AC en diámetros de 3/32" (2,4 mm) y 1/8" (3,2 mm), en la figura 119 se
muestra la máquina de soldar.
Figura 119. Suelda Smaw
151
1.2 TALADRO DEWALT DW217
Figura 120. Taladro DEWALT
(Dewalt, 2014)
CARARCTERÍSTICAS:
Especialmente diseñada para conseguir mejores resultados de
taladrado a alta velocidad con brocas muy pequeñas en metales de
bajo calibre, aleaciones de aluminio
Motor reversible con protección por sobrecarga que evita problemas
en situaciones críticas
Portabrocas sin llave de 10mm que proporciona un cambio rápido y
fácil de la broca con una sola mano
Empuñaduras e interruptores revestidos
de goma
para
una
manipulación más agradable y un trabajo más ergonómico
Equilibrado y ligero para uso con una sola mano
Sistema de sujeción del cable con doble abrazadera para que evitar
que el cable se dañe en el transporte
ESPECIFICACIONES:
Capacidad de portabrocas: 0.5-10 mm
152
Potencia absorbida:
Potencia de salida: 340 W
Par máx. sostenido: 8.2 Nm
Velocidad sin carga : 0-4000 rpm
Máx. Capacidad de taladrado [Madera]: 20 mm
Máx. Capacidad de taladrado [Acero:]: 8 mm
Rosca : 3/8" x 24 U.N.F
Peso: 1.2 kg
Longitud: 247 mm
Alto: 177 mm
Vibración Mano/Brazo – Metal: 4.6 m/s²
Presión sonora: 74 dB (A)
Presión Acústica: 83 dB (A)
675 W
1.3 COMPRESOR PORTEN
Figura 121. Compresor Porten
(Porten, 2014)
Compresor de 2 hp, tanque con capacidad de 6.3 galones / 24 litros, diseño
horizontal, motor eléctrico con protector térmico, presión máxima 116 psi,
caudal 3.4 cfm @ 90 psi, transmisión directa.
153
Anexo II
Programación de PIC 18F452
//configuracionde fusibles y microcontrolador**************************
#include <18F452.h>
//Escogemos el microcontrolador a utilizar
#device adc=10
#fuses XT,NOWDT,NOBROWNOUT
//Oscilador High Speed, Codigo no
protegido, No Watch Dog, No Reset
#use delay(clock=4M)
#use fast_io (e)
#include <flex_lib20x4.c>
//declaracion de variables******************************************************
int16 adc, old_adc,tt,tm;
int16 rpm_in;
signed int16 temp_trans, temp_motor;
float temptrans, tempmotor;
int16 rpmin_aux;
float rpmout;
int16 rpm_out;
int marchas;
int marcha;
int1 up_down;
int1 temp3=0;
int1 temp4=0;
int1 freno=0;
int enviar=0;
int1 on=0;
int i;
int1 auxx=0;
154
int1 auxy=1;
//*******************************************************************************
void selenoides()
{
if(marchas==5
||
marchas==6
||
marchas==7
||
marcha==1){output_high(pin_c0);output_high(pin_c0);}
if(marcha==4){output_high(pin_c0);output_low(pin_c1);}
if(marcha==3){output_low(pin_c0);output_low(pin_c1);}
if(marcha==2){output_low(pin_c0);output_high(pin_c1);}
if(marcha==1){output_high(pin_c0);output_high(pin_c1);}
if((temp3==1 && marcha==3 && freno==0)|| (temp4==1 && marcha==4 &&
freno==0))
{
output_high(pin_c2);
if(auxx==0)
{
output_low(pin_c3);
delay_ms(1000);
output_high(pin_c3);
auxx=1;
}
auxy=0;
}
else
{
output_low(pin_c2);
if(auxy==0)
{
155
output_low(pin_c3);
delay_ms(1000);
output_high(pin_c3);
auxy=1;
}
auxx=0;
}
if(marchas==1
||
marchas==2
||
marchas==3
||
marchas==4
)output_high(pin_c3);
else output_low(pin_c3);
if(marcha==3 || marcha==4){output_high(pin_c4);output_high(pin_c5);}
else {output_high(pin_c4);output_low(pin_c5);}
if( rpm_out==0 && marchas==4 && marcha==5)marcha=1;
if(marchas==4&&marcha==7)marcha==1;
if ( rpm_in>700 && ( ((marchas==3 || marchas==4) && marcha!=1 &&
up_down==1)
|| (((marchas==3 && marcha==3) || (marchas==4 &&
(marcha==3 || marcha==4))) && up_down==0) )) output_high(pin_c6);
else output_low(pin_c6);
if(marchas==4 && marcha==1 )output_low(pin_c6);
if (freno == 1)output_low(pin_c2);
if(marchas==4&&marcha==7)marcha==1;
156
}
#int_ext
void int0_isr()
{
marchas=5;
marcha=5;
enviar=marcha;
selenoides();
}
#int_ext1
void int1_isr()
{
marchas=6;
marcha=6;
selenoides();
}
#int_ext2
void int3_isr()
{
marchas=7;
marcha=7;
if(marchas==4&&marcha==7)marcha==1;
selenoides();
}
#int_rb
157
void rb_isr()
{
if(input_state(pin_b4)==0)marchas=1;
if(input_state(pin_b5)==0)marchas=2;
if(input_state(pin_b6)==0)marchas=3;
if(input_state(pin_b7)==0)marchas=4;
selenoides();
}
void main()
{
set_tris_e (0);
//configuracion de la lcd***********************************************************
lcd_init();
setup_adc_ports(AN0_AN1_AN3 );
setup_adc( ADC_CLOCK_INTERNAL);
//**********************************************************************************
lcd_gotoxy(5,1);
printf(lcd_putc,"UNIVERSIDAD");
lcd_gotoxy(5,2);
printf(lcd_putc,"TECNOLOGICA");
lcd_gotoxy(5,3);
printf(lcd_putc,"EQUINOCCIAL");
delay_ms(6000);
printf(lcd_putc,"\f");
lcd_gotoxy(6,1);
printf(lcd_putc,"FACULTAD DE");
lcd_gotoxy(4,2);
printf(lcd_putc,"CIENCIAS DE LA");
lcd_gotoxy(6,3);
158
printf(lcd_putc,"INGENIERIA");
delay_ms(4000);
printf(lcd_putc,"\f");
lcd_gotoxy(6,1);
printf(lcd_putc,"CARRERA DE");
lcd_gotoxy(6,2);
printf(lcd_putc,"INGENIERIA");
lcd_gotoxy(6,3);
printf(lcd_putc,"AUTOMOTRIZ");
delay_ms(4000);
printf(lcd_putc,"\f");
lcd_gotoxy(1,1);
printf(lcd_putc,"RPM IN=%lu%s",rpm_in,"rpms");
lcd_gotoxy(1,2);
printf(lcd_putc,"RPM OUT=%lu%s",rpm_out,"rpms");
marchas=7;
enable_interrupts(global);
enable_interrupts(int_rb);
enable_interrupts(int_ext);
ext_int_edge(0,h_to_l);
enable_interrupts(int_ext1);
ext_int_edge(1,h_to_l);
enable_interrupts(int_ext2);
ext_int_edge(2,h_to_l);
do{
if (((input(pin_c7)==0) && (marchas==5 || marchas==7)) || on==1 )on=1;
if (input(pin_c7)==1)on=0;
old_adc=adc;
adc=0;
159
tt=0;
tm=0;
for(i=0;i<=9;i++)
{
set_adc_channel(0);
delay_ms(10);
adc=adc+read_adc();
delay_ms(10);
set_adc_channel(1);
delay_ms(10);
tt=tt+read_adc();
delay_ms(10);
set_adc_channel(3);
delay_ms(10);
tm=tm+read_adc();
delay_ms(10);
}
adc=adc/10;
tt=tt/10;
tm=tm/10;
if (on==1)
{
rpm_in=adc*4000.0/1023.0;
temptrans=-41+(tt*191.0/1023.0);
temp_trans=temptrans;
tempmotor=-40+(tm*160.0/1023.0);
temp_motor=tempmotor;
if(temp_motor>20 && temp_trans>135)temp3=1;
else temp3=0;
if(temp_motor>20 && temp_trans>30)temp4=1;
160
else temp4=0;
if(old_adc<adc-5){output_high(pin_d7);up_down=1;}
if(old_adc>adc+5){output_low(pin_d7);up_down=0;}
selenoides();
}
else
{
rpm_in=0;
temptrans=0;
temp_trans=0;
tempmotor=0;
temp_motor=0;
}
switch (marchas)
{
case 1:{
//if(up_down==1 && marchas==1 && marcha==2)marcha=1;
if(up_down==0 && marchas==1&&marcha==2) marcha=1;
if(rpm_in>2534)rpm_in=2534;
rpmout=(rpm_in-700)*0.451472;
if(rpmout>828)rpmout=828;
rpm_out=rpmout;
marcha=1;
enviar=marcha;
output_e(enviar);
}
break;
case 2:{
if(up_down==1 && marchas==2 && marcha==1)marcha=2;
if(up_down==1 && marchas==2&&marcha==3) marcha=2;
if (rpm_in>=0 && rpm_in<2534)
161
{
rpmout=(rpm_in-700)*0.451472;
if(rpmout>828)rpmout=828;
rpm_out=rpmout;
marcha=1;
enviar=marcha;
output_e(enviar);
}
if(rpm_in>2699 && marcha==2)rpm_in=2699;
if (rpm_in>2535 && rpm_in <=2699)
{
rpmout=829+((rpm_in-2535)*5.0426);
if(rpmout>1656)rpmout=1656;
rpm_out=rpmout;
marcha=2;
enviar=marcha;
output_e(enviar);
}
}
break;
case 3:{
if(up_down==1 && marchas==3 && marcha==2)marcha=3;
if(up_down==1 &&marchas==3 && marcha==4) marcha=3;
if (rpm_in>=0 && rpm_in<2534)
{
rpmout=(rpm_in-700)*0.451472;
if(rpmout>828)rpmout=828;
rpm_out=rpmout;
marcha=1;
enviar=marcha;
162
output_e(enviar);
}
if (rpm_in>2535 && rpm_in <=2699)
{
rpmout=829+((rpm_in-2535)*5.0426);
if(rpmout>1656)rpmout=1656;
rpm_out=rpmout;
marcha=2;
enviar=marcha;
output_e(enviar);
}
if(rpm_in>3488&&marcha==3)rpm_in=3488;
if(rpm_in>2700 && rpm_in<=3488)
{
rpmout=1657+((rpm_in-2700)*2.3236);
if(rpmout>3488)rpmout=3488;
rpm_out=rpmout;
marcha=3;
enviar=marcha;
output_e(enviar);
}
}
break;
case 4:{
if(up_down==1 && marchas==4 && marcha==3)marcha=4;
if (rpm_in>=1 && rpm_in<2534)
{
rpmout=(rpm_in-700)*0.451472;
163
if(rpmout>828)rpmout=828;
rpm_out=rpmout;
marcha=1;
enviar=marcha;
output_e(enviar);
}
if (rpm_in>2535 && rpm_in <=2699)
{
rpmout=829+((rpm_in-2535)*5.0426);
if(rpmout>1656)rpmout=1656;
rpm_out=rpmout;
marcha=2;
enviar=marcha;
output_e(enviar);
}
if(rpm_in>2700 && rpm_in<=3488)
{
rpmout=1657+((rpm_in-2700)*2.3236);
if(rpmout>3488)rpmout=3488;
rpm_out=rpmout;
marcha=3;
enviar=marcha;
output_e(enviar);
}
if(rpm_in>4000&&marchas==4)rpm_in=4000;
if(rpm_in>3489&&rpm_in<=4000)
{
rpmout=3489+((rpm_in-3489)*4.354);
if(rpmout>5714)rpmout=5714;
164
rpm_out=rpmout;
marcha=4;
enviar=marcha;
output_e(enviar);
}
}
break;
case 6:{
if(marcha==6) marcha=6;
if(rpm_in>1904)rpm_in=1904;
rpmout=(rpm_in-700)*0.687708;
if(rpmout>828)rpmout=828;
rpm_out=rpmout;
marcha=6;
enviar=marcha;
output_e(enviar);
}
break;
}
if(rpm_in>4000&&marchas>4)rpm_in=4000;
if (rpm_in<700){output_low(pin_d6);rpm_out=0;rpm_in=700;}
else output_high(pin_d6);
if (on==0){rpm_in=0;rpm_out=0;}
if (on==1&& (marchas==5 || marchas==7))rpm_out=0;
165
if( rpm_out==0 && marchas==4 && marcha==7)marcha=1;
selenoides();
printf(lcd_putc,"\f");
lcd_gotoxy(1,1);
printf(lcd_putc,"RPM IN=%lu%s",rpm_in," rpms");
lcd_gotoxy(1,2);
printf(lcd_putc,"RPM OUT=%lu%s",rpm_out," rpms");
if (marchas<=4)
{
lcd_gotoxy(1,3);
printf(lcd_putc,"RANGO=%u",marchas);
lcd_gotoxy(1,4);
printf(lcd_putc,"MARCHA=%u",marcha);
}
if (marchas==5)
{
output_e(5);
lcd_gotoxy(1,3);
printf(lcd_putc,"RANGO=PARKING");
lcd_gotoxy(1,4);
printf(lcd_putc,"MARCHA=PARKING");
}
if (marchas==6)
{
output_e(6);
lcd_gotoxy(1,3);
printf(lcd_putc,"RANGO=REVERSA");
lcd_gotoxy(1,4);
166
printf(lcd_putc,"MARCHA=REVERSA");
}
if (marchas==7)
{
output_e(7);
lcd_gotoxy(1,3);
printf(lcd_putc,"RANGO=NEUTRO");
lcd_gotoxy(1,4);
printf(lcd_putc,"MARCHA=NEUTRO");
}
if(input_state(pin_b3)==0)freno=1;
else freno=0;
}while(true);
}
167
Anexo III
Programación de PIC 18F4550
//configuracionde fusibles y microcontrolador ******************************
#include <18F4550.h>
//Escogemos el microcontrolador a utilizar
#device adc=10
#fuses INTRC,NOWDT,NOBROWNOUT, NOMCLR
//Oscilador High
Speed, Codigo no protegido,
No Watch Dog, No Reset
#use delay(clock=4M)
#use fast_io(c)
#include <flex_lib.c>
//*********************************************************************************
//declaracion de variables*******************************************
int rango;
int marcha;
int16 tt,tm;
unsigned int16 temp_trans, temp_motor;
float temptrans, tempmotor;
int i;
//**********************************************************************************
void selenoides()
{
if (marcha==2 || (rango==4 && marcha==4))output_high(pin_c0);
else output_low(pin_c0);
if(rango==6)output_high(pin_c1);
else output_low(pin_c1);
168
if(rango==1||rango==2||(rango==3 && marcha==3))output_high(pin_c2);
else output_low(pin_c2);
if(rango==5 || rango==6 || rango==7)output_low(pin_d0);
else output_high(pin_d0);
if((marcha==4 && rango==4 )|| rango==5 || rango==6 || rango==7
)output_low(pin_c4);
else output_high(pin_c4);
if(marcha==3 || marcha==4)output_high(pin_c5);
else output_low(pin_c5);
}
#int_ext
void int0_isr()
{
rango=5;
marcha=5;
selenoides();
}
#int_ext1
void int1_isr()
{
rango=6;
marcha=6;
selenoides();
}
#int_ext2
void int3_isr()
169
{
rango=7;
marcha=7;
selenoides();
}
#int_rb
void rb_isr()
{
if(input_state(pin_b4)==0)rango=1;
if(input_state(pin_b5)==0)rango=2;
if(input_state(pin_b6)==0)rango=3;
if(input_state(pin_b7)==0)rango=4;
selenoides();
}
void main()
{
set_tris_c (0b00111111);
lcd_init();
setup_adc_ports(AN0_TO_AN1 );
setup_adc( ADC_CLOCK_INTERNAL);
enable_interrupts(global);
enable_interrupts(int_rb);
enable_interrupts(int_ext);
ext_int_edge(0,h_to_l);
enable_interrupts(int_ext1);
ext_int_edge(1,h_to_l);
enable_interrupts(int_ext2);
ext_int_edge(2,h_to_l);
170
output_e(0);
do{
tm=0;
tt=0;
for(i=0;i<=9;i++)
{
set_adc_channel(0);
tt=tt+read_adc();
delay_ms(100);
set_adc_channel(1);
tm=tm+read_adc();
}
tm=tm/10;
tt=tt/10;
temptrans=-41+(tt*191.0/1023.0);
temp_trans=temptrans;
tempmotor=-40+(tm*160.0/1023.0);
temp_motor=tempmotor;
delay_ms(100);
printf(lcd_putc,"\f");
lcd_gotoxy(1,1);
printf(lcd_putc,"TEM MOTOR=%ld%s",temp_motor,"oC");
lcd_gotoxy(1,2);
printf(lcd_putc,"TEM TRANS=%ld%s",temp_trans,"oC");
marcha=input_c();
marcha=marcha&0b00000111;
//output_bit( marcha.0,0);
171
selenoides();
switch (rango)
{
case 1:
{
output_low(pin_d1);
output_high(pin_d2);
output_high(pin_d3);
}
break;
case 2:
{
output_high(pin_d1);
output_high(pin_d2);
output_high(pin_d3);
}
break;
case 3:
{
output_high(pin_d1);
output_high(pin_d2);
output_low(pin_d3);
}
break;
case 4:
{
output_high(pin_d1);//n
output_low(pin_d2);//r
output_low(pin_d3);//p
}
break;
172
case 5:
{
output_high(pin_d1);
output_low(pin_d2);
output_high(pin_d3);
}
break;
case 6:
{
output_low(pin_d1);
output_low(pin_d2);
output_high(pin_d3);
}
break;
default:
{
output_high(pin_d1);
output_low(pin_d2);
output_high(pin_d3);
}
}
if(rango==1 || rango==2 || rango==3 || rango==4) output_high(pin_e0);
else output_low(pin_e0);
if(rango==1 || rango==2 || rango==3 ) output_high(pin_e1);
else output_low(pin_e1);
if(rango==1 || rango==2 ) output_high(pin_e2);
else output_low(pin_e2);
}while(true);
}
173
Anexo IV
Fabricación de la PCB
En el proceso, una vez impreso el circuito en la baquelita de fibra de vidrio
se procede a realizar las perforaciones para así colocar todos los elementos
que componen la PCB.
En la figura 122, figura 123, figura 124 y figura 125 se muestra el armado de
la placa PCB.
Figura 122. Circuito impreso
174
Figura 123. Perforación de la placa
Figura 124. Colocación de los elementos en la placa
175
Figura 125. Soldada de los elementos en la placa
Anexo V
Diagrama de flujo del funcionamiento de la
electrónica de la caja de cambios automática
176
INICIO
PALANCA
P–R–N–D–3–2-1
NO
PLANCA
P–N
SI
ENCENDIDO ON
ENCENDIDO
NO
APAGAR OFF
1
FIN
SI
PALANCA
P
NO
PALANCA
R
SI
RPM IN
700 a 4000
RPM OUT
=0
PARK
SA ON, SB ON, TCC
OFF, PWM OFF, SCP
ON 2, SC 3-2 OFF.
PALANCA
N
SI
RPM IN
700 A 1904
RPM OUT
0 A 828
SI
NO
NO
NO
NO
SI
RPM IN
700 A 4000
RPM OUT
>=0
NO
REVERSA
SI
SA ON, SB ON, TCC
OFF, PWM OFF, SCP
ON 2, SC 3-2 OFF.
NEUTRAL
NO
NO
SI
PALANCA
3
RPM IN
700 A 2534
RPM OUT
0 A 828
ASCENDENTE
SI
PALANCA
2
RPM IN
700 A 2534
RPM OUT
0 A 828
ASCENDENTE
SI
PALANCA
1
RPM IN
700 A 2534
RPM OUT
0 A 828
ASCENDENTE
SI
NO
SA ON, SB ON, TCC OFF,
PWM OFF, SCP ON 2,
SC 3-2 OFF.
NO
ASCENDENTE
SI
SI
1
PALANCA
D
SI
NO
RPM IN = 700
RPM OUT = 0
NO
NO
ASCENDENTE
1ERA MARCHA
SI
SA ON, SB ON, TCC OFF,
PWM ON, SCP ON 2,
SC 3-2 OFF.
RPM IN = 700
RPM OUT = 0
1ERA MARCHA
SI
SI
RPM IN = 700
RPM OUT = 0
SI
1
SI
NO
ASCENDENTE
NO
RPM IN
2535 A 2699
RPM OUT
829 A 1656
ASCENDENTE
SI
SI
SA OFF, SB ON, TCC OFF,
PWM ON, SCP ON 2,
SC 3-2 ON.
1ERA MARCHA
NO
NO
RPM IN
2535 A 2699
RPM OUT
829 A 1656
DESCENDENTE
ASCENDENTE
2DA MARCHA
NO
SA OFF, SB ON, TCC OFF,
PWM ON, SCP ON 2,
SC 3-2 ON.
RPM IN
2700 A 3488
RPM OUT
1657 A 3488
DESCENDENTE
ASCENDENTE
SA OFF, SB OFF, TCC OFF,
PWM ON, SCP ON 5,
SC 3-2 ON.
NO
SA OFF, SB OFF, TCC OFF,
PWM ON, SCP ON 5,
SC 3-2 ON.
SI
TCC
OFF
NO
RPM IN
3489 A 4000
RPM OUT
3489 A 5714
DESCENDENTE
ASCENDENTE
FRENO
NO
SA ON, SB OFF, TCC ON,
PWM ON, SCP ON 5,
SC 3-2 ON.
SI
NO
DESCENDENTE
SI
NO
RPM IN
2700 A 3488
RPM OUT
1657 A 3488
DESCENDENTE
NO
DESCENDENTE
SA OFF, SB OFF, TCC OFF,
PWM ON, SCP ON 5,
SC 3-2 ON.
SI
SI
TFT > 135°C
ECT > 20°C
SI
RPM IN = 700
RPM OUT = 0
SI
SI
1
NO
RPM IN
2535 A 2699
RPM OUT
829 A 1656
DESCENDENTE
NO
DESCENDENTE
SI
2DA MARCHA
SA OFF, SB ON, TCC OFF,
PWM ON, SCP ON 2,
SC 3-2 OFF.
SI
RPM IN
700 A 2534
RPM OUT
0 A 828
DESCENDENTE
NO
DESCENDENTE
SI
1ERA MARCHA
SA ON, SB ON, TCC OFF,
PWM ON, SCP ON 2,
SC 3-2 OFF.
SI
RPM IN = 700
RPM OUT = 0
SI
1
DESCENDENTE
SA ON, SB ON, TCC OFF,
PWM ON, SCP ON 2,
SC 3-2 OFF.
3ERA MARCHA
TCC ON
NO
1ERA MARCHA
SI
NO
NO
SA OFF, SB ON, TCC OFF,
PWM ON, SCP ON 2,
SC 3-2 OFF.
RPM IN
700 A 2534
RPM OUT
0 A 828
DESCENDENTE
TCC ON
SI
2DA MARCHA
NO
TFT > 29°C
ECT > 20°C
TCC ON
SA ON, SB ON, TCC OFF,
PWM ON, SCP ON 2,
SC 3-2 OFF.
NO
TCC ON
SI
NO
SI
SI
NO
TFT > 135°C
ECT > 20°C
TCC ON
RPM IN
2535 A 2699
RPM OUT
829 A 1656
DESCENDENTE
4TA MARCHA
FRENO
SI
1ERA MARCHA
RPM IN = 700
RPM OUT = 0
SI
TCC
OFF
NO
NO
NO
NO NO
NO
DESCENDENTE
SI
NO
TCC ON
NO
SI
NO
FRENO
RPM IN
700 A 2534
RPM OUT
0 A 828
DESCENDENTE
NO
SI
TCC ON
TCC
OFF
SA OFF, SB ON, TCC OFF,
PWM ON, SCP ON 2,
SC 3-2 OFF.
3ERA MARCHA
TFT > 135°C
ECT > 20°C
TCC ON
NO
SI
SI
FRENO
NO
NO
SI
IGUAL
SI
NO
IGUAL
SI
RPM IN 700
RPM OUT 0
SI
1
NO
3ERA MARCHA
TCC
OFF
2DA MARCHA
SI
SI
NO
SI
ASCENDENTE
NO
SA ON, SB ON, TCC OFF,
PWM ON, SCP ON 2,
SC 3-2 OFF.
ASCENDENTE
SI
NO
SI
SA ON, SB ON, TCC OFF,
PWM ON, SCP ON 2,
SC 3-2 OFF.
1
RPM IN
2700 A 3488
RPM OUT
1657 A 3488
ASCENDENTE
RPM IN
700 A 2534
RPM OUT
0 A 828
DESCENDENTE
ASCENDENTE
SI
1ERA MARCHA
ASCENDENTE
2DA MARCHA
NO
SI
SA ON, SB ON, TCC OFF,
PWM ON, SCP ON 2,
SC 3-2 OFF.
RPM IN
2535 A 2699
RPM OUT
829 A 1656
ASCENDENTE
NO
1
NO
IGUAL
SI