4. CÁLCULO DINÁMICO DEL MOTOR 4.1 CÁLCULO
Anuncio

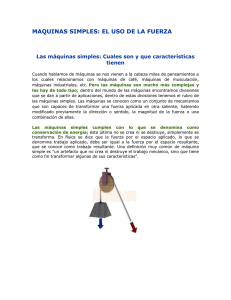
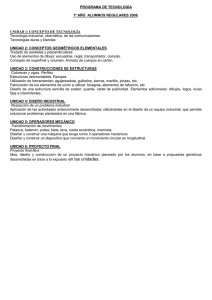
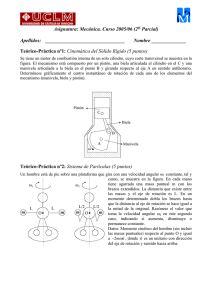
4. CÁLCULO DINÁMICO DEL MOTOR 4.1 CÁLCULO CINEMÁTICO DEL MECANISMO BIELA-MANIVELA Figura 4.1. Operación de un motor de 8 cilindros en V de encendido por chispa. La determinación, durante el cálculo del ciclo de trabajo, de las principales dimensiones del motor (diámetro del cilindro, carrera del pistón) da la posibilidad de efectuar el análisis cinemático de los elementos del mecanismo biela-manivela, MBM (pistón, biela, manivela) y escalar las medidas de composición principales y también calcular las velocidades y aceleraciones de estas piezas para el consiguiente cálculo dinámico y la predicción del período de servicio del motor. Los datos iniciales para el cálculo cinemático son la carrera del pistón y el esquema constructivo elegido para el mecanismo biela-manivela (mecanismo biela-manivela centrado o descentrado). Para el MBM más difundido –el central (ver figura 4.2) el principal parámetro cinemático, el radio de la manivela se determina como la mitad de la carrera com mpleta de el pistón (R=S/2) el e valor de d otro parámetro p o geométtrico, adim mensional, λ, el cua al representa la rela ación del radio de la manive ela R sobrre la longitud de e la biela a L, gene eralmente e se tom ma del ra ango 0,24 4...0,31. El cá álculo cinemático se s efectúa por las siguientes s s fórmulass: - La velocidad angularr de rotac ción de la manivela a (rad/s) ω=d dϕ/dt=πn/3 30 don nde ϕ - án ngulo de giro g de la manivela a, tomado o en cuen nta a parttir de la posición pa ara la cua al el pistón n se encu uentra en el P.M.S.; n- frecue encia -1 de rotación r d árbol cigüeñal, del c min - La velocidad tangencial del exxtremo de e la maniv vela (m/s)) um=Rω = - La acelerac ción centríípeta del extremo de d la man nivela (m//s) εm=R Rω2 - El desplazam d miento Sp, la veloc cidad vp y la acele eración jp del pistón en EL MBM M centrrado son: λ λ ⎡⎛ λ ⎞ ⎛ ⎞⎤ ⎡ ⎤ S p = R ⎢⎜1 + ⎟ − ⎜ cos ϕ + cos 2ϕ ⎟⎥ = R ⎢(1 − cos ϕ ) + (1 − coos 2ϕ )⎥, 4 4 ⎠⎦ ⎣ ⎦ ⎣⎝ 4 ⎠ ⎝ λ λ ⎡ ⎤ ⎛ πn ⎞ ⎡ ⎤ v p = R⎜ ⎟ ⎢sin s ϕ + sin s 2ϕ ⎥ = R ⋅ ω ⎢sin ϕ + sin 2ϕ ⎥; 2 2 ⎝ 30 ⎠ ⎣ ⎣ ⎦ ⎦ ⎛ πn ⎞ j p = R⎜ ⎟ [cos ϕ + λ ccos 2ϕ ] = Rω 2 [cos ϕ + λ cos 2ϕ ]; ⎝ 30 ⎠ 2 Figu ura 4.2 Prin ncipales esquemas e s construc ctivos de lo os MBM d de los mottores de automóvil a les y tracttores. A) central; c b) desplaza ado; c) en n forma de e V. - El desplazam d miento, la a velocida ad y la ac celeración n del pistó ón en el MBM M desp plazado: λ ⎡ ⎤ S p = R ⎢(1 − cosϕ ) + (1 − cos 2ϕ ) − kλ sin ϕ ⎥, 4 ⎣ ⎦ λ ⎛ ⎞ v p = R ⋅ ω ⎜ sin ϕ + sin 2ϕ − kλ cosϕ ⎟, 2 ⎝ ⎠ j p = Rω 2 (cosϕ + λ cos 2ϕ + kλ sin ϕ ), donde k=a/R es el desplazamiento relativo (se elige del rango 0,05...0,15); a es el desplazamiento del eje del cilindro con respecto al eje del árbol cigüeñal. - La velocidad media del pistón (m/s) vm = S ⋅n 2 = Rω 30 π - La velocidad máxima del pistón (m/s) v max = Rω 1 + λ2 4.2 CÁLCULO DINÁMICO DEL MECANISMO BIELA-MANIVELA Generalidades. Al trabajar el motor, sobre las piezas del mecanismo biela-manivela actúan las fuerzas de presión de los gases en el cilindro y las fuerzas de inercia de las masas en movimiento del mecanismo. Se distinguen: fuerzas de inercia de las masas en movimiento alternativo Pj y las fuerzas centrífugas de inercia de las masas en rotación Kr. Debido a las fuerzas generadas por la presión de los gases y a las fuerzas de inercia surgen las fuerzas de fricción, las fuerzas de resistencia útil en el árbol cigüeñal, las reacciones en los apoyos del árbol cigüeñal y del motor. El cálculo y el análisis de las fuerzas que actúan en el mecanismo biela-manivela (MBM) es necesario para efectuar el cálculo de los elementos del motor a la resistencia, para analizar el balanceo y así calcular la suspensión del motor, para determinar la no homogeneidad del giro (desuniformidad) del cigüeñal y para calcular la volante. En el transcurso de cada ciclo de trabajo los valores y las direcciones de las fuerzas que actúan sobre el MBM; varían (figura 4.3). Para aclarar el carácter de variación de estas fuerzas según el ángulo de giro del árbol cigüeñal y la construcción de los gráficos correspondientes, es necesario calcular los valores para posiciones determinadas del árbol con el mayor grado de resolución del árbol cigüeñal en los límites desde 0 hasta 720 grados de giro del árbol cigüeñal para los motores de cuatro tiempos y hasta 360 grados de giro del árbol cigüeñal para los de dos tiempos. Por inicial (cero) se toma la posición de la manivela, dura ante la cu ual el pistó ón se encuentra al inicio de la carrera a de adm misión para a los mottores de cuatro tie empos y al comie enzo de lla carrera a de expa ansión pa ara los de dos tiemp pos. Figura 4.3. 4 Fuerza as y mom mentos qu ue actúan en el mecanismo biela a-manivela Cálculo de e las fue erzas qu ue actúa an en el e meca anismo biela b man nivela. Ell cálculo de las fu uerzas qu ue actúan n sobre e el mecanismo biela a manivela se efec ctúa en el siguiente e orden: La fu uerza de presión de e los gase es sobre el e pistón (e en Newton ns) 6 Pg=1 10 (p-p0)FFp Don nde p es la presión n indicad da de los gases (p presión sobre el pisstón) para a un ángulo de giiro dado del cigüe eñal, en MPa; M p0 ––presión en e el cártter del mo otor (bajo o el pistón=, en MPa, M se forma igua al a la pre esión atm mosférica para p todo os los motores de ventilación del cá árter; para a los mottores de dos d tiempos con so oplado en n el cárter del cigü üeñal se to oma igua al a la pre esión de soplado pk; Fp –área de la se ección de el cilindro, m2. La fu uerza de inercia i de e las masa as en mov vimiento alternativo a o. Pj=-m mjRω2(cossϕ+λ.cos2ϕ ϕ) Don nde mj es la masa de d las piezzas en mo ovimiento o lineal alternativo en e el mec canismo MBM; M mj=m = p+κmb; mp es la a masa de e las piezzas del grupo pistó ón; mb es la masa de la biela en su conjunto o (mp y mb se calc culan por los dibujo os de las piezas p o se s eligen de d los datos estadísticos a partir p de la tabla 2.5); 2 κ–es la parte de d la massa de la biela b que participa a del mov vimiento alternativo a o (se elige e en los lím mites de 0,25...0,275 5). La fuerza resu ultante so obre el pa asador de el pistón y dirigida a lo largo o del eje del d cilindrro es: P=Pgg+Pj La fu uerza tota al que acttúa a lo la argo de la a biela es: Sb=P P/cosβ; Donde β -ángulo de inclinación con respecto al eje del cilindro: β = arc sin(λ sinϕ) La fuerza lateral, perpendicular al eje del cilindro: N=P tgβ La fuerza normal dirigida a lo largo de la manivela, K=P cos(ϕ+β)/cosβ La fuerza total tangencial perpendicular al radio de la manivela, T=Psin(ϕ+β)/cosβ El momento torsor resultante (indicado), desarrollado por un cilindro del motor, Mt=T R La fuerza de inercia centrífuga de la parte en rotación de la biela, dirigida a lo largo del radio de la manivela, y que carga al muñón de biela (cojinete de biela), Kbr=-(1-κ)mb R ω2 La fuerza de inercia centrífuga de la manivela, dirigida a lo largo del radio de rotación, Kmr=-mm R ω2 Donde mm –es la masa no balanceada de los elementos de la manivela (con respecto al eje de rotación de la manivela) reducida a su radio: mm=mmb+2mcρ/R; mmb –es la masa del muñón de biela; mc –es la masa no balanceada de los de la cara; ρ -es la distancia desde el eje de rotación hasta el centro de gravedad de la masa no balanceada de la cara. Los valores de mmb, mc y ρ se determinan a partir del plano del árbol cigüeñal (manivela) o se eligen a partir de datos estadísticos. La fuerza de inercia centrífuga resultante, dirigida a lo largo del radio de la manivela y la cual carga el muñón de apoyo (muñón de bancada). Kr=Kbr+Kmr, La fuerza resultante, que actúa sobre el muñón de biela del cigüeñal, R ab = T 2 + (K + K br ) , 2 y su dirección con respecto a la manivela se determina por al ángulo ⎡ ⎤ T ⎥ ⎣ ( K + K br ) ⎦ ϕ ´ = arc tg ⎢ Los valores de las fuerzas y momentos se determinan con la mayor resolución disponible para el ángulo de giro del cigüeñal. Construcción de los gráficos de fuerzas y momentos. La variación de las fuerzas que actúan sobre el MBM, en función del ángulo de giro de la manivela se grafican en un sistema rectangular de coordenadas a partir de los datos obtenidos de las expresiones anteriores (figura 4.4). Comúnmente se agrupan los gráficos Pg, Pj, P; Sb, N; K, T. El gráfico Rab se construye también en coordenadas polares tomando como dirección base (eje polar) la dirección de la manivela (Figura 4.5), para lo cual se utiliza el ángulo ψ´. Por el gráfico de fuerzas Rab en el sistema de coordenadas rectangular se puede determinar su Rab max y Rab min (valores máximos y mínimos), y también su valor medio Rabm dividiendo el área (mm2), limitada por la gráfica y los ejes de coordenadas, sobre la longitud (mm) de la gráfica. Es conveniente construir todos los gráficos en una sola escala, con la misma resolución en el ángulo de giro del cigüeñal, mientras que las mallas de coordenadas rectangulares deben disponerse una bajo la otra. Tal disposición de los gráficos en una hoja facilita el análisis y el control de la fidelidad de su construcción. El gráfico de la fuerza tangencial puede representar el gráfico del momento indicado, desarrollado por un cilindro del motor; la escala del momento es igual al producto de la escala de la fuerza tangencial por el radio de la manivela (en m): μMt=μT · R Por el gráfico del momento indicado para un cilindro se puede construir el gráfico del momento total indicado de un motor multicilíndrico . Para el motor con sucesión uniforme de los procesos homólogos la construcción del gráfico ∑ M t = f (ϕ) se reduce a la descomposición del gráfico del momento de torsión para un cilindro (figura 4.6 a) en un número de tramos igual al número de cilindros que tenga el motor, al desplazamiento de las partes del gráfico obtenidas a una nueva gráfica de coordenadas de longitud θ y a la consiguiente sumatoria gráfica de las ordenadas (figura 4.6b). El intervalo angular para cada tramo corresponden al intervalo entre chispas (inflamaciones) en diferentes cilindros del motor y es igual al período de variación del momento total θ=180 τ/ic. Figu ura 4.4 Grráficos de e las fuerza as que ac ctúan sobre el mec canismo bielab man nivela. ura 4.5 Dia agrama de d la fuerrza resulta ante que actúa sobre el mu uñón Figu de biela b en la a manivela. a a) b) Figu ura 4.6 Construcció ón del gráfico de el momen nto total indicado o del mottor multic cilíndrico para una sucesió ón uniforrme de los proce esos. (Ejem mplo de un u motor de cuatro o cilindros, cuatro tiiempos) Algu unos motores de automóv viles y tractores se caracterizan por una suce esión irreg gular de los proce esos (inflamacioness). Generralmente esta irreg gularidad es apare ejada, es decir, tiene lugar sólo para a dos cilin ndros que e trabajan n uno trass otro. Para tales motores m el período de varia ación del momento o de torsió ón total se e alarga en dos ve eces (en compara ación con los moto ores que tienen un na sucesió ón uniform me de prrocesos): θnu= 2·18 80 τ/ic. En este perííodo se efectúan e dos d inflam maciones con suce esión irreg gular (no uniforme e) a trav vés de lo os interva alos angu ulares θ’y y θ’’, dete erminados por el esquema e constructivo del motor, ad demás θ’+ θ’’ =θnu o de torssión total para este moto or se u. El gráffico del momento construye en una nuev va malla de coordenadas, cuya c long gitud en el e eje de las abscisas (eje ϕ) debe ser iguall al perío odo θnu. El gráfico o de parttida del momento m de torsión n para un n cilindro del moto or inicialmente se parte p en su s longitud d en ic/2 partes igu uales, las cuales se e desplaza an a una nueva malla m de e coorden nadas de manera igual a c como estto se hac ce en caso de una a sucesión n regular de proce esos. Desp pués el mismo gráffico de pa artida se transforma desplazzando el eje de orrdenadas (eje Mt) a la izquie erda en un u ángulo θ’’ o a la a derecha a en un ángulo θ’(e en la e muestra a el despla azamiento o del eje de d las ord denadas en e el figurra 4.7,a se áng gulo θ’ a la a derecha a). La parrte inicial del gráfic co de parrtida, corttado por el nuevo eje de coordenad das se de esplaza ha acia un extremo de tal nera que la longitu ud total del d gráfic co transformado (c con un nu uevo man origen de coo ordenada as) corresp ponda al período del d gráfico o de partida. Figu ura 4.7 Co onstrucció ón del grá áfico del momento o total ind dicado de e un mottor multicilíndrico co on sucesió ón de pro ocesos no uniforme. El gráfico g tra ansformad do del momento m de torsión para u un cilindro o de nuevo se div vide en su s longitu ud en ic/2 2 partes iguales, las cuale es se desp plazan a la mism ma malla nueva de d coord denadas ∑Mt-ϕ como com mplemento a las anteriorme a ente desp plazadas tres parte es del grá áfico de partida. Después todas lass ic parte es de los gráficos de partid da y transformado os en la nueva malla m de coorden nadas se suman para p obte ener el gráfico de el momen nto torsor total ind dicado d del motor (ver figurra 4.7b). Del gráfico del d momento torsorr indicado o, es deciir, la supe erficie limittada por el gráfico o del mom mento tota al y el eje de las ab bscisas (ve er figura 4..6b): ∑Mtm=[(F1-F2)]]/l]μMt , don nde F1, F2 –son – las áreas á limittadas porr el gráfico o del mom mento tottal ∑ Mt correspon c dienteme ente arriba y abajo o del eje de las ab bscisas de entro 2 de un períod do, mm (para ic≥6 ≥ en la mayoría m d los ca de asos F2=0;; l – long gitud del gráfico g en n los límite es de un período, p en n mm. El momento m t torsor med dio efectiv vo del mo otor Me=∑M = M t · ηm , Don nde ηm –ess el rendim miento me ecánico del d motor. El va alor del momento m torsor efe ectivo medio del motor, m determinado o por el método m de escrito debe coinciidir con ell Me, calculado porr la fórmula 4 Mθ=30 ·10 Ne/(πn) La desviación en la determinación de Mθ por el método grafo analítico no debe superar el ±5%.