Ondas y Rotaciones
Anuncio

Hoja de Trabajo 24
Ondas y Rotaciones
Dinámica de las Rotaciones IV
Jaime Feliciano Hernández
Universidad Autónoma Metropolitana - Iztapalapa
México, D. F. 15 de agosto de 2012
A. ACTIVIDAD INDIVIDUAL. En esta Hoja de trabajo veremos algunos problemas con
todo detalle. De manera individual estudiarlos a profundidad, completar los pasos que
no se muestran y elaborar una lista de dudas sobre su resolución. Presentar estas
dudas al grupo, al ayudante y al profesor hasta resolverlas.
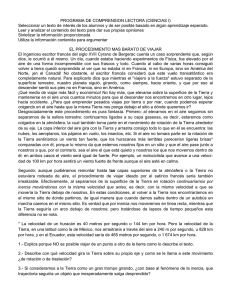
Ejemplo 1. Tres partículas de masas m1 = 2.3kg , m2 = 3.2kg y m3 = 1.5kg están en
los vértices de un triángulo rectángulo de lados 3, 4 y 5, como se muestra en la
figura. A) Hallar la inercia de rotación en torno a los ejes que pasan por cada una de
las tres partículas. B) Hallar la inercia rotacional en torno a un eje perpendicular al
plano XY y que pasa por el centro de masa.
A) Sabemos que la
inercia rotacional
está definida con la
expresión:
I = ∑ mi ri 2
Con respecto a m1 ;
I1 = m1r12 + m2 r22 + m3r32
a) Con respecto al
eje que pasa por la
masa m1 las
distancias de las
otras partículas
son: 3m para m2 y
4m para m3 . Así
que los distintos
valores de I son:
= (2.3kg )(0m) 2 + (3.2kg )(3m) 2 + (1.5kg )(4m) 2
= 52.8kg ⋅ m 2
Con respecto a m2 ;
I 2 = m1 r12 + m2 r22 + m3 r32
= (2.3kg )(3m) 2 + (3.2kg )(0m) 2 + (1.5kg )(5m) 2
= 58.2kg ⋅ m 2
Con respecto a m3 ;
1
Hoja de Trabajo 24
I 3 = m1 r12 + m2 r22 + m3 r32
= (2.3kg )(4m) 2 + (3.2kg )(5m) 2 + (1.5kg )(0m) 2
= 116.8kg ⋅ m 2
¿Alrededor de qué
eje se requiere
mayor esfuerzo?
¿Alrededor de cual
se requiere menor
esfuerzo para
hacer rotar al
sistema?
B) Para este caso
primero debemos
encontrar las
coordinadas del
centro de masa. Si
recordamos, la
definición de la Hoja
de trabajo 16,
tenemos:
Hay mayor inercia rotacional cuando se coloca un eje que pasa
por la masa m3 , y si consideramos que la inercia es una
medida de la resistencia al movimiento (o a detenerlo)
entonces con respecto a este eje se requerirá mayor esfuerzo.
Por el contrario, con respecto al eje que pasa por m1 la
inercia rotacional es menor y por ello se requiere menor
esfuerzo para realizar la rotación o para detenerla.
xcm =
m1 x1 + m2 x 2 + m3 x3 + L + m N x N
1
=
m1 + m2 + m3 + L + m N
M
y cm =
m1 y1 + m2 y 2 + m3 y 3 + L + m N y N
1
=
m1 + m2 + m3 + L + m N
M
N
∑m x
j =1
∑m
j =1
(2.3kg )(0m) + (3.2kg )(0m) + (1.5kg )(4m)
2.3kg + 3.2kg + 1.5kg
= 0.8571 m
(2.3kg )(0m) + (3.2kg )(3m) + (1.5kg )(0m)
2.3kg + 3.2kg + 1.5kg
= 1.3714 m
y cm =
Ahora podemos
calcular la distancia
al eje para cada
partícula como
r1 , r2 y r3 :
Así:
Análogamente:
2
2
r12 = xCM
+ y CM
= (0.8571 m) 2 + (1.3714 m) 2 = 2.6253m 2
2
r22 = xCM
+ ( y 2 − y CM ) 2
= (0.8571 m) 2 + (3 − 1.3714 m) 2 = 3.3869m 2
2
r32 = ( x3 − xCM ) 2 + y CM
= (4 − 0.8571 m) 2 + (1.3714 m) 2 = 11.7585m 2
2
j
j
yj
N
xcm =
Sustituyendo los
valores:
j
Hoja de Trabajo 24
Por lo tanto, la
I CM = ∑ mi ri 2 =
inercia rotacional
con respecto al eje
= (2.3kg )(2.6253m 2 ) + (3.2kg )(3.3869m 2 ) + (1.5kg )(11.7585m 2 )
que pasa por el
2
centro de masa es: = 34.51402kg m
Con respecto al eje que pasa por el centro de masa la inercia rotacional es mayor, y
eso significa que se requiere de un mayor esfuerzo para iniciar la rotación con
respecto a este eje, o cuando ya está en rotación costaría un esfuerzo mayor
detener al sistema.
Ejemplo 2. El objeto mostrado en la figura consta de dos partículas de masas m1 y
m2 , unidas por una varilla rígida de longitud L . A) Despreciando la masa de la varilla,
halle la inercia rotacional I de este sistema para rotaciones alrededor de un eje
perpendicular a la varilla y a una distancia x de m1 . B) Demuestre que I es mínima
cuando x = xCM .
Para calcular la inercia
rotacional empleamos
la expresión:
Donde r1 y r2 son las
distancias de las
partículas al eje de
rotación. Para este
caso, y considerando la
geometría del problema,
la inercia rotacional es:
Ahora queremos
encontrar el valor
mínimo de esta
expresión, por lo que
aplicamos el criterio
que proviene del cálculo
diferencial; primero
encontramos la
derivada con respecto a
las posibles variaciones
de x :
Ahora igualamos a cero:
I = ∑ mi ri 2
= m1 r12 + m 2 r22
I = m1 x 2 + m2 ( L − x) 2
{
}
dI
d
=
m1 x 2 + m2 ( L − x) 2 =
dx dx
= 2m1 x + 2m2 ( L − x)(−1)
dI
= 2m1 x + 2m2 ( L − x)(−1) = 0
dx
= 2m1 x − 2m2 ( L − x) = 0
2m1 x − 2m2 ( L − x) = 0
3
Hoja de Trabajo 24
(2m1 + 2m2 )x − 2m2 L = 0
Distribuyendo y
factorizando:
2(m1 + m2 )x − 2m2 L = 0
2m 2 L
m2 L
x=
=
2(m1 + m2 ) (m1 + m2 )
Despejamos el valor de
x:
Definimos a esta
cantidad como:
x MIN ≡
m2 L
(m1 + m2 )
⎧ ⎛ m 2 L ⎞⎫
⎛ m2 L ⎞
⎟⎟ + m 2 ⎨ L − ⎜⎜
⎟⎟⎬
I = m1 ⎜⎜
⎝ (m1 + m 2 ) ⎠
⎩ ⎝ (m1 + m 2 ) ⎠⎭
2
Así que cuando
m2 L
x=
la inercia
(m1 + m2 )
rotacional alcanza un
valor crítico.
I=
2
⎛ m 2 m22 L2 ⎞
⎛ m2 L ⎞
2
⎜
⎟ − 2 m 2 L⎜
+
+
m
L
2
2
2 ⎟
⎜ (m + m ) ⎟⎟
⎜
(m1 + m2 )
2 ⎠
⎝ 1
⎝ (m1 + m2 ) ⎠
⎛ m 22 L2 ⎞
⎛ m 22 L2 ⎞
2
⎟
⎜⎜
⎟⎟
+
−
2
m
L
I = (m1 + m2 )⎜⎜
2
2 ⎟
⎝ (m1 + m2 ) ⎠
⎝ (m1 + m 2 ) ⎠
m1 m22 L2
⎛ m 2 L2
I = ⎜⎜ 2
⎝ m1 + m2
⎞
⎛
2m 2
⎟⎟ + m2 L2 ⎜⎜1 −
⎝ m1 + m2
⎠
⎛ m2
I = m2 L2 ⎜⎜
⎝ m1 + m2
⎞
⎛
2m 2
⎟⎟ + m2 L2 ⎜⎜1 −
⎠
⎝ m1 + m2
Factorizando:
⎛ m2
2m 2
I = m2 L2 ⎜⎜
+1−
m1 + m2
⎝ m1 + m2
⎛ m1
I = m2 L2 ⎜⎜
⎝ m1 + m2
⎛ mm
I = L2 ⎜⎜ 1 2
⎝ m1 + m2
¿Cómo sabemos que
este es un valor
mínimo? Podemos
graficar la función
I = m1 x 2 + m2 ( L − x) 2
para algunos valores de
m1 y m2 ; la gráfica es la
de una parábola, y
muestra un valor
mínimo.
4
⎞
⎟⎟
⎠
⎞
⎟⎟
⎠
⎞
⎟⎟
⎠
⎞
⎟⎟
⎠
⎞
⎟⎟
⎠
Hoja de Trabajo 24
dI
= 2{m1 x − m 2 ( L − x)} = 2{x ( m1 + m 2 ) − m 2 L}
dx
d 2I
Ahora la segunda
= 2{x(m1 + m2 ) − m2 L} = 2(m1 + m2 )
derivada es:
dx 2
d 2I
¡Queda claro que
> 0 es la condición para un mínimo!
dx 2
Podemos reescribir la
derivada de I como:
Consideremos ahora el
sistema con la
referencia indicada:
En esta configuración el
centro de masa es:
xCM =
m1 (− x) + m2 ( L − x)
m1 + m2
xCM =
m2 L
−x
m1 + m2
xCM = x MIN − x
Observemos que
Vemos que cuando x MIN = x , entonces xCM = 0 , es decir que la inercia rotacional es
mínima cuando el eje de rotación pasa por el centro de masa.
Ejemplo 3. Un péndulo consta de un cuerpo de masa m = 0.17 kg y en el extremo de
una varilla rígida de longitud L = 1.25m cuya masa es despreciable. A) ¿Cuál es la
magnitud de la torca debida a la gravedad en torno al punto O en el instante en que
el péndulo se desplaza como se muestra a través de un ángulo de θ = 10° de la
vertical? B) ¿Cuál es la dirección de la torca en torno a O en ese instante?
¿Depende su dirección de que el péndulo se desplace hacia la izquierda o hacia la
derecha de la vertical?
r
A) Podemos usar la ecuación para la
torca:
De la figura, vemos que la componente
de la fuerza que contribuye a la torca es
mgsen (θ ) :
τr = rr × F
τ = r × F = Lmgsen (θ )
5
Hoja de Trabajo 24
Para un ángulo de θ = 10° :
Sustituyendo:
τ = Lmgsen (10°)
τ = (1.25m)(0.17 kg )(9.8m / s 2 ) sen(10°)
τ = 0.36 N ⋅ m
B) Podemos aplicar la regla de la mano derecha, para ver que, con el
desplazamiento como se muestra, la torca alrededor del punto O sale del plano del
papel. Si el péndulo se desplaza hacia el lado opuesto de la vertical, la torca tiene la
dirección opuesta. En estas condiciones, el efecto de la torca es producir una
aceleración angular paralela.
En cada caso la aceleración angular tiende a mover al péndulo hacia su posición de
equilibrio para restituir al péndulo en su posición alrededor de la cual oscila.
Hay un cambio en la dirección de la torca porque se invierte la dirección de la fuerza
que es tangencial al movimiento.
Cuando el péndulo va a la derecha la
torca entra a la superficie del papel.
Cuando el péndulo va a la izquierda la
torca sale a la superficie del papel.
Ejemplo 4. En un parque de diversiones el papá de un niño empuja un tiovivo,
ejerciendo una fuerza F de 115 N de magnitud en un punto P de la periferia. Situado
a una distancia de r = 1.75m del eje de rotación. La fuerza se ejerce en una dirección
que forma un ángulo de 32° debajo de la horizontal, y la componente horizontal de la
fuerza está en una dirección de 15° hacia adentro de la tangente en P. Hallar la
magnitud de la componente de la torca que acelera al tiovivo.
6
Hoja de Trabajo 24
Solamente la componente horizontal de
F produce torca. De la gráfica podemos
Fh = F cos(32°) = 97.5 N
ver que a lo largo de la línea horizontal, la
fuerza perpendicular a r es F cos(32°) .
De la misma manera, la componente
F⊥ = Fh cos(15°) = 94.2 N
perpendicular de la fuerza es:
Así pues, la torca (vertical) a lo largo del
τ = rF⊥ = (1.75m)(94.2 N ) = 165.N ⋅ m
eje de rotación es:
La componente de Fh paralela a r (= Fh sen 15°) no produce torca alguna en torno al
eje de rotación, y la componente vertical de F ( = Fsen 32°) produce una torca
perpendicular al eje que tendería a ladear la plataforma giratoria afuera del plano
horizontal (porque el padre está empujando hacia abajo sobre la plataforma) si a esa
torca no se le opusiera esa torca igual y contraria desde las chumaceras.
El padre debe ejercer una torca que exceda a cualquier torca por fricción
proveniente de las chumaceras. Cuando el padre deja de empujar, esta torca por
fricción, que ahora actúa sola, hace más lento el giro del tiovivo hasta que consigue
frenarlo y llevarlo al reposo.
Ejemplo 5. La figura muestra un disco uniforme de masa M = 2.5kg y radio
R = 20cm montado en un eje horizontal fijo (sin fricción). Un bloque de masa
m = 1.2kg cuelga de un cordón que pasa alrededor del borde del disco. Hallar la
aceleración del bloque al caer, la tensión del cordón y la aceleración angular del disco.
La figura (b) muestra un diagrama libre de cuerpo para el bloque. El bloque se
acelera hacia debajo de modo que su peso mg debe exceder la tensión T del cordón
a fin de que se produzca el movimiento. Consideremos como positiva la dirección
hacia abajo, por lo que de la segunda ley de Newton tenemos:
7
Hoja de Trabajo 24
∑ F = mg − T = ma
(A)
La figura (c) muestra un diagrama libre de cuerpo para el disco. La única torca que
actúa sobre el disco, tomada con respecto a su eje de rotación es TR porque la
tensión es perpendicular al radio. Por otra parte, aplicando la segunda ley de Newton
1
en la forma angular τ = Iα , con y la inercia de rotación del disco es I = MR 2 y la
2
relación entre la aceleración angular y la lineal ( a = Rα ), tenemos:
TR = Iα =
∴
T=
a
1
MR 2
2
R
1
Ma
2
(B)
1
Ma = ma
2
⎛1
⎞
mg = ⎜ M + m ⎟ a
⎝2
⎠
mg
a=
⎛1
⎞
⎜ M + m⎟
⎝2
⎠
2mg
a=
(M + 2m )
mg −
Combinando (A) y (B):
2(1.2kg )(9.8m / s 2 )
a=
(2.5kg + 2(1.2kg )
Sustituyendo:
a = 4 . 8m / s 2
La aceleración al caer es menor que g ,
1
Así que podemos sustituir en la
∴ T = ( 2.5kg )( 4.8m / s 2 ) = 6 N
ecuación (2):
2
La tensión en el cordón de 6 N es menor que el peso del bloque colgante
( = mg = (1.2 Kg )(9.8m / s 2 ) = 11.76 N
Ejemplo 6. Resolver el Problema 5 desde el punto de vista del trabajo y la energía.
Supongamos que el sistema ha salido del reposo. Lo examinamos más tarde cuando
el bloque ha caído una distancia L ; en ese punto el bloque se mueve a una velocidad
v , y el disco está girando a una velocidad angular ω . Si el cordón no se desliza sobre
el disco, entonces v = ωR ; además, cuando el bloque cae una distancia L , el disco
debe girar un ángulo φ de modo que L = Rφ
Consideremos tres sistemas diferentes:
1. Sistema = bloque + disco. La gravedad (la única fuerza externa) efectúa un
trabajo externo mgL sobre el sistema al moverse el bloque hacia abajo una
distancia L . El trabajo externo neto es, entonces,
8
Hoja de Trabajo 24
Wext = mgL
No existe un trabajo de fricción efectuado en el eje (sin fricción) o entre el
cordón y el disco (donde no existe movimiento relacionado).
El cambio en la energía cinética es la energía cinética final, puesto que el
sistema fue liberado desde el reposo:
ΔK = K f − K i =
1 2 1
Iω + mv 2
2
2
El teorema del trabajo-energía nos da:
Wext = ΔK
Por lo tanto
mgL =
1 2 1 2
Iω + Iv
2
2
Empleando la relación entre la velocidad angular y la velocidad lineal:
2
mgL =
1 ⎛v⎞
1
I ⎜ ⎟ + mv 2
2 ⎝R⎠
2
Despejando:
⎡ 2mg ⎤
v 2 = 2⎢
L
⎣ M + 2m ⎥⎦
La cantidad entre corchetes es precisamente la aceleración que
encontramos antes., pues si la comparamos con la ecuación lineal
v 2 = v 02 + 2ax , y como se parte del reposo, claramente es correcto el valor
encontrado.
2. Sistema = bloque. Aquí el trabajo externo sobre el sistema es efectuado por
la gravedad y por la tensión en cordón:
Wneto = mgL − TL
El cambio en la energía cinética del sistema (el bloque) es precisamente
1 2
mv , y el teorema trabajo-energía nos da:
2
1 2
mv
2
Sustituyendo el resultado para v 2 , podemos demostrar que esto da la tensión
hallada en la solución al Problema 5.
mgL − TL =
3. Sistema = disco. En este caso, solamente T ejerce un trabajo externo y al usar
la ecuación para una rotación en un ángulo total φ efectuad por la torca
constante TR , obtenemos:
9
Hoja de Trabajo 24
Wneto = TRφ − TL
Y el cambio en la energía cinética del sistema (el disco) es
2
1 2 1⎛1
1
2⎞ v
ΔK = Iω = ⎜ MR ⎟ 2 = Mv 2
2
2⎝ 2
4
⎠R
Al aplicar nuevamente el teorema de trabajo-energía, obtenemos:
1
Mv 2
4
Este resultado es consistente con los encontrados antes.
TL =
Ejemplo 7. Un yoyo de masa M = 0.023k , que consta de dos discos de radio
R = 2.6cm unidos por un eje de radio R0 = 0.3cm , está girando en el extremo de un
cordón de longitud L = 0.84m con una velocidad angular ω0 . ¿Qué velocidad angular
se necesita para que el yoyo suba por el cordón? Suponga que el cordón tiene un
espesor despreciable.
Al comenzar la subida, sólo existe energía cinética de rotación, pero al final, ésta es,
en parte energía cinética de rotación, en parte energía cinética de translación, y en
parte energía potencial gravitatoria.
1 2 1 2 1
Iω0 = Iω + Mv 2 + MgL
2
2
2
Donde ω y v son las velocidades finales angular y lineal. No podemos resolver este
problema para un yoyo real, pero podemos hacerlo para un yoyo ideal con un cordón
de espesor despreciable hallando la condición necesaria para que el yoyo llegue justo
a la mano (llegando con v = ω = 0 ):
1 2
Iω0 = MgL
2
1
Usando la inercia de rotación de un disco ( I = MR 2 ) y despreciando la contribución
2
del eje a la inercia de rotación, resolvemos para ω0 y hallamos:
ω0 =
4 gL
=
R2
4(9.8m / s 2 )(0.84m)
= 221 rad / s = 35 rev / s
(0.026m) 2
Esta es una velocidad de rotación bastante baja, pues son comunes las velocidades
de 100 rev / s , especialmente si el yoyo es lanzado hacia debajo de modo que su
energía de translación inicial se convierte en energía de rotación. En el caso de una
velocidad lineal inicial grande, llegaría a la mano con una velocidad lineal considerable.
De hecho, un truco muy conocido consiste en soltar el cordón del dedo en el último
momento, permitiendo que la velocidad vertical del yoyo lo lleve a varios metros hacia
arriba.
10
Hoja de Trabajo 24
La interacción de las energías cinéticas de translación, de rotación, y de la potencial
gravitatoria es la causante del comportamiento del yoyo y de muchos trucos que
pueden hacerse con él.
Problema 8. Un cilindro de masa M y radio R rueda hacia abajo sin deslizamiento
por un plano inclinado de longitud L y altura h . Hallar la velocidad de su centro de
masa cuando el cilindro llega a la parte baja del plano.
Un objeto que rota puede pensarse que lo hace con respecto a un eje que pasa por el
punto de contacto con la superficie horizontal. Ese es un eje instantáneo, y en este
caso se trata del punto B.
La energía cinética de rotación será:
Ec =
1
I Bω 2
2
Por el teorema de los ejes paralelos, podemos escribir:
I B = I CM + h 2 M
Donde h es la distancia del punto B al centro de masa, por lo que:
11
Hoja de Trabajo 24
Ec =
(
)
1
I CM + h 2 M ω 2
2
1
1
I CM ω 2 + h 2 Mω 2
2
2
Ec =
En este caso h = R , y usando la relación entre la velocidad angular y la velocidad
lineal:
1
1
E c = I CM ω 2 + R 2ω 2 M
2
2
Ec =
1
1
2
I CM ω 2 + (Rω ) M
2
2
Ec =
1
1 2
I CM ω 2 + vCM
M
2
2
Esta relación expresa muy claramente que la energía cinética de un objeto en
rotación con respecto a un eje instantáneo de rotación, que es virtual, se puede
separar en dos parte: una energía de rotación con respecto al centro de masa, más
una energía de translación del centro de masa.
Así que, para resolver este problema usamos la conservación de la energía. El
cilindro está inicialmente en reposo. En la parte superior, la energía potencial es
ΔU = Mgh , y en la parte más baja, ésta se transforma totalmente en energía
cinética de rotación más la energía cinética de translación.
Mgh =
1
1
2
MvCM
+ I CM ω 2
2
2
(C)
Usando las relaciones para la Inercia rotacional del cilindro I CM =
1
MR 2 y la de la
2
velocidad angular:
2
Mgh =
1
1⎛1
⎞⎛ v ⎞
2
MvCM
+ ⎜ MR 2 ⎟⎜ CM ⎟
2
2⎝2
⎠⎝ R ⎠
Mgh =
1
1
3
2
2
2
MvCM
+ MvCM
= MvCM
2
4
4
Por lo tanto:
vCM =
4
gh
3
(D)
Observemos que si el objeto no rotara al bajar, es decir que bajara deslizándose
entonces no aparece el segundo sumando del lado derecho de la ecuación (C):
12
Hoja de Trabajo 24
Así que la velocidad adquiere el valor:
vCM = 2 gh
(E)
Si comparamos los dos valores, de las velocidades expresados en las ecuaciones (D)
y (E), podemos ver que por el hecho de rotar, parte de la energía de translación se
ocupa en producir el movimiento de rotación, por eso el resultado de la ecuación (D)
es menor que el de la ecuación (C).
Ejemplo 9. Una esfera, un cilindro y un aro comienzan desde el reposo y ruedan abajo
por el mismo plano inclinado, como se muestra en la figura. ¿Cuál de todos llega
primero al fondo?
Vamos a resolver este problema comparando las aceleraciones de los centros de
masa de los tres objetos. El que tenga una aceleración mayor será el que llega
primero al fondo.
A partir de los cálculos anteriores, tenemos la siguiente ecuación general para el
movimiento a lo largo del plano:
Mg senθ − f = MaCM
Donde la fuerza de fricción es:
f = I CM
α
R
= I CM
aCM
R2
Que es la fuerza que produce la torca que produce la rotación del objeto. Ahora,
combinando estas ecuaciones tenemos:
a
Mg senθ − I CM CM2 = MaCM
R
Podemos despejar la aceleración que se aplica para los tres objetos:
Mg senθ = I CM
aCM
+ MaCM
R2
⎛I
⎞
Mg senθ = ⎜ CM2 + M ⎟aCM
⎝ R
⎠
13
Hoja de Trabajo 24
aCM =
∴
aCM =
Mg senθ
⎛ I CM
⎞
⎜ 2 +M⎟
⎝ R
⎠
g senθ
⎛ I CM
⎞
+ 1⎟
⎜
2
⎝ MR
⎠
(F)
Ahora la aplicamos para cada objeto:
Esfera:
Cilindro:
Aro:
g senθ 5
= g senθ = 0.714 g senθ
⎛2 ⎞ 7
⎜ + 1⎟
⎝5 ⎠
1
I CM
g senθ 2
Ö aCM =
=
= g senθ = 0.667 g senθ
2
2
MR
⎛1 ⎞ 3
⎜ + 1⎟
⎝2 ⎠
g senθ 1
I CM
= g senθ = 0.5 g senθ
= 1 Ö aCM =
2
(1 + 1) 2
MR
2
I CM
=
2
5
MR
Ö aCM =
I CM =
2
MR 2
5
I CM =
1
MR 2
2
I CM = MR 2
Claramente la esfera tiene una aceleración mayor y es la primera que llega al fondo.
Luego le sigue el cilindro y finalmente el aro. La razón se puede explicar de la
siguiente manera. La esfera tiene más compacta su constitución y puede aceptar la
rotación con el menor costo de energía cinética, puesto que su inercia rotacional es
la más pequeña de las tres.
Observa la Tabla de algunos valores de Inercia Rotacional de diferentes cuerpos
que se encuentra en la Hoja de trabajo 23, y responde a las siguientes preguntas ¿Si
pones a “competir” los diferentes cuerpos en un plano inclinado, cuál es la
aceleración en cada caso? ¿Cuál llegará primero al piso? ¿Puedes pensar en un
juego para construir tu Proyecto Integrador?
Ejemplo 10. A un cilindro sólido uniforme de radio R = 12cm y de masa M = 3.2kg
se le da una velocidad angular ω 0 = 15 rev / s (en el sentido de las manecillas del
reloj) y luego se le hace descender a una superficie horizontal plana. El coeficiente de
fricción cinética entre la superficie y el cilindro es μ k = 0.21 . Inicialmente, el cilindro
14
Hoja de Trabajo 24
se desliza al moverse a lo largo de la superficie, pero después de un tiempo t inicia
un rodamiento puro sin deslizamiento. A) ¿Cuál es la velocidad vCM del centro de
masa en el tiempo t ? B) ¿Cuál es el valor de t ?
A) En la figura se muestran las fuerzas que actúan sobre el cilindro. Puesto que todas
las fuerzas son constantes mientras ocurre el desplazamiento, la aceleración aCM
del centro de masa en la dirección x es constante. Entonces, para el movimiento de
translación, podemos escribir:
⎛ v f − vi ⎞
⎟⎟
aCM = ⎜⎜
⎝ t −0 ⎠
Pues la aceleración es constante, y consideramos la variación desde el valor inicial en
la velocidad, al tiempo cero, y la velocidad final al tiempo. En este caso, la suma de las
fuerzas debe producir un movimiento con esa aceleración:
⎛ v f − vi ⎞
⎟⎟
= MaCM = M ⎜⎜
−
t
0
⎝
⎠
La única fuerza horizontal es la fricción, que es el producto del coeficiente de fricción
y la fuerza normal, que es precisamente el valor del peso:
∑F
x
vCM
t
La aceleración angular α alrededor de un eje que pase por el centro de masa es
también constante, de modo que, para el movimiento de rotación, podemos escribir:
μ k Mg = M
⎛ ω f − ωi ⎞
⎟⎟
⎝ t −0 ⎠
Aquí, eligiendo que las rotaciones en sentido contrario a las manecillas sean
−v
positivas, ω f = CM , la velocidad angular en el tiempo t , y ωi = ω0 . Solamente la
R
fuerza f produce una torca en torno al centro de masa; la torca resultante es
∑τ = I
⎜
CM α = I CM ⎜
μ k MgR , una cantidad positiva. Usando
⎛1
⎝2
∑τ = Iα , obtenemos
⎞⎛ − vCM R − (−ω0 ) ⎞
⎟
t
⎠⎝
⎠
μ k Mg = ⎜ MR 2 ⎟⎜
15
Hoja de Trabajo 24
Eliminando t de esas ecuaciones y despejando vCM , obtenemos:
1
1
vcm = ω0 R = (15 rev / 2 )(2π rad / rev )(0.12 m ) = 3.8 m / s
3
3
Nótese que vCM no depende de los valores de M , g o μ k . Sin embargo, ¿qué
ocurriría si cualquiera de estas cantidades fuera cero?
B) Al eliminar a vCM de las ecuaciones anteriores, podemos despejar a t y hallar:
t=
ω0 R
= 1.8s
3μ k g
B. ACTIVIDAD INDIVIDUAL. Entregar un reporte virtual al correo electrónico del
profesor y del ayudante, conteniendo la integración de los conocimientos construidos
en esta actividad, que consiste en:
a) El mapa conceptual Individual, los elementos que se han ido agregando en
cada punto.
a) El mapa conceptual del equipo.
b) Las respuestas personales.
c) Las aportaciones del equipo.
16