Actuaciones. Autorrotación.
Anuncio

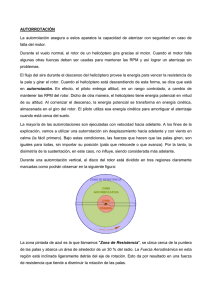
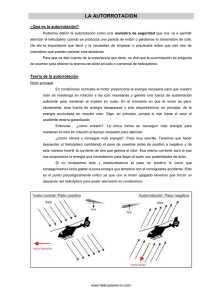
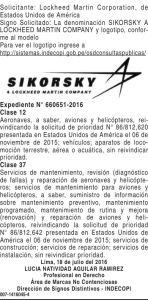
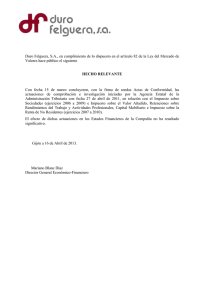
Actuaciones Autorrotación. Referencia Básica [EMC05] Helicópteros () Actuaciones Autorrotación 1 / 31 Introducción La maniobra de autorrotación se denió como la rotación del rotor sin aplicación de potencia por parte de la planta propulsora. La potencia necesaria para mover el rotor proviene de la pérdida de energía potencial gravitatoria que produce una corriente relativa al rotor capaz de mantener la rotación de las palas. Es decir, la autorrotación se produce en vuelo de descenso. Este tipo de maniobra es fundamental en el caso de pérdida de potencia en la planta propulsiva. El piloto debe perder altura a una velocidad controlada para conseguir mantener el rotor girando y por tanto produciendo tracción. Se debe recordar que el proceso de autorrotación ocurre fundamentalmente en la zona de estela turbulenta. Helicópteros () Actuaciones Autorrotación 2 / 31 Fundamento físico I En general en la maniobra de descenso de autorrotación, el análisis local de la conguración aerodinámica implica que existirán zonas: Productoras de potencia: la componente de fuerza tangencial al plano del rotor es en el sentido de la rotación. Consumidoras de potencia: la componente de fuerza tangencial al plano del rotor es contraria al sentido de la rotación. En general existirán dos secciones cuyo ángulo de entrada de corriente será tal que solo existirá componente de tracción y la componente de fuerza tangencial será nula. El balance global entre las zonas productoras de potencia y las consumidoras de potencia implicará una potencia neta nula. Helicópteros () Actuaciones Autorrotación 3 / 31 Fundamento físico II En general, los ángulos de entrada de corriente son mayores en la zona de la raíz de la pala, mientras que en la punta son menores. Por tanto: zona interiores de la pala presentan ángulos de ataque grandes y la sustentación se orienta en la misma dirección que la velocidad de rotación por lo que esta zona produce potencia. zona de punta de pala presenta ángulos de ataque pequeños y la sustentación se orienta en la dirección opuesta a la velocidad de rotación por lo que esta zona consume potencia. Helicópteros () Actuaciones Autorrotación 4 / 31 Fundamento físico III Zona de consumo de potencia Zona de producción de potencia Zona de entrada en pérdida Helicópteros () Actuaciones Autorrotación 5 / 31 Fundamento físico IV Seccion C Seccion B Seccion A dF T dF 0 dT dF T dT dL dL dT µ ® µ Up UT Á µ dD Up UT Á Helicópteros () ® Up dD Á UT dD ® Seccion B dL Seccion A Actuaciones Seccion C Autorrotación 6 / 31 Fundamento físico V En la condición de autorrotación el par neto comunicado por esta conguración es nulo. La velocidad de rotación del rotor se ajustará hasta alcanzar el equilibrio entre las fuerzas de inercia de rotación y las fuerzas aerodinámicas. Sección característica en autorrotación: es la sección en la que debido a la conguración aerodinámica local, las fuerzas aerodinámicas sólo producen tracción y la fuerza tangencial es nula y por tanto esta sección ni consume ni produce potencia al rotor. Helicópteros () Actuaciones Autorrotación 7 / 31 Diagrama de autorrotación I Caracterización de la sección de autorrotación: considerando dFa = 0 dFa = dLφa − dD = 0 dD Cd φa = = dL Cl Por tanto, el paso colectivo para obtener la condición de autorrotación vendrá determinado por αa = θa + φa Cd αa = θa + (α ) Cl a Helicópteros () Actuaciones Autorrotación 8 / 31 Diagrama de autorrotación II Diagrama de autorrotación: dadas las características aerodinámicas de los perles del rotor se representa la relación Cd /Cl en función del ángulo de ataque. Dado un ángulo de paso θ1 la intersección de una recta de pendiente unidad con la curva (Cd /Cl )(α) (punto A) proporciona el ángulo de la sección característica de autorrotación y el ángulo de entrada de corriente para conseguir componente de fuerza tangencial nula. Punto A es el punto que representa el equilibrio conseguido en la autorrotación φa = Cd /Cl Helicópteros () Actuaciones Autorrotación 9 / 31 Diagrama de autorrotación III Á Aceleración µmax D B Autorrotación Cd = Cl A Áa C µa Áa Desaceleración ® ®a Helicópteros () Actuaciones Autorrotación 10 / 31 Diagrama de autorrotación IV Análisis cualitativo de la estabilidad de la autorrotación: Considérese una perturbación de la posición de equilibrio (por ejemplo una ráfaga vertical ascendente). El ángulo de entrada de corriente aumentará, φ > Cd /Cl , y el sistema se moverá al punto B. Esta situación corresponde a una sección como la B y por tanto aparecerá una fuerza tangencial, tanto disminuirá φ dFa > 0 que aumentará la Ω del rotor y por devolviendo al sistema a la posición de equilibrio A. Considérese una perturbación de la posición de equilibrio (por ejemplo una ráfaga vertical descendente). El ángulo de entrada de corriente disminuirá, φ < Cd /Cl y el sistema se moverá al punto C. Esta situación corresponde a una sección como la C y por tanto aparecerá una fuerza tangencial, tanto aumentará Helicópteros () φ dFa < 0 que disminuirá la Ω del rotor y por devolviendo al sistema a la posición de equilibrio A. Actuaciones Autorrotación 11 / 31 Diagrama de autorrotación V Valores θ > θmax implican que no existe equilibrio de autorrotación. Para estos ángulos de paso dFa = dLφa − dD < 0 y por tanto el rotor terminará por detenerse produciendo un descenso sin tracción del helicóptero. Helicópteros () Actuaciones Autorrotación 12 / 31 Autorrotación axial. Disco resistente. I Modelo de disco resistente. Debido a que en el descenso en autorrotación el rotor se encuentra en el régimen de estela turbulenta se suele realizar la analogía de considerar el rotor como un disco resistente impermeable. Según esta analogía la tracción generada por el disco resistente se puede expresar como T = Dd = 1 2 ρ V AC 2 d dr donde Cdr es el valor del coeciente de resistencia del disco resistente. Helicópteros () Actuaciones Autorrotación 13 / 31 Autorrotación axial. Disco resistente. II Este coeciente de resistencia suele tomar valores en torno 1,25 − 1,30 siendo 1,28 un valor muy empleado en las estimaciones en autorrotación. La velocidad de descenso en autorrotación en estas condiciones es s 2W 1 Vd = ρ A Cdr que en formato adimensional es: Vd √ 2 = vi 0 Cdr Helicópteros () Actuaciones Autorrotación 14 / 31 Autorrotación axial. Modelo elemento de pala. I Ecuación de la energía: Pg = Pc + Pi + P0 + Pf + Ptr = 0 En el vuelo axial se suelen despreciar la potencia asociada a la resistencia del fuselaje (ya que la resistencia del fuselaje es muy pequeña con respecto el peso y las velocidades de descenso son moderadas) y la del rotor de cola. Por tanto, en forma adimensional, esta ecuación se escribe como: (λc + κλi ) CT + Helicópteros () Actuaciones σ Cd 0 8 =0 Autorrotación 15 / 31 Autorrotación axial. Modelo elemento de pala. II Ecuación de condición de autorrotación. Se considera que la sección x = 0,7 corresponde a la sección característica de autorrotación y que todo el rotor estará funcionando en esta condición. Por tanto la ecuación que relacionaba el paso colectivo con el ángulo de ataque para autorrotación será: αa = θa + δ0 + δ1 αa + δ2 αa2 Clα αa donde el subíndice a hace referencia a autorrotación. Esta expresión proporciona una relación entre αa y θa = θ (x = 0,7). Es decir conocido el ángulo de paso para autorrotación, paso colectivo, el ángulo de ataque de la sección característica es: (Clα − δ2 ) αa2 − (Clα θa + δ1 ) αa − δ0 = 0 Debe destacarse que el coeciente de resistencia Cd 0 = Cd (αa ). Helicópteros () Actuaciones Autorrotación 16 / 31 Autorrotación axial. Modelo elemento de pala. III Coeciente de tracción: dado que se considera que todo el rotor se encontrará funcionando con un ángulo de ataque uniforme αa el coeciente de tracción se puede expresar como: Z 1 σ C (α ) σ Cl (αa ) 2 x dx = l a CT = 2 0 6 La ecuación de equilibrio de fuerzas en la dirección vertical proporciona una ecuación para determinar la velocidad del rotor en autorrotación T =W ΩR = Helicópteros () s 6W (1) ρ Aσ Cl (αa ) Actuaciones Autorrotación 17 / 31 Autorrotación axial. Modelo elemento de pala. IV Ecuación de velocidad inducida en descenso. Como se comentó en la lección de vuelo axial en descenso una aproximación para la relación entre la velocidad inducida y la velocidad de descenso es: 7 λi = r CT 2 ! + 3λc Sistema de ecuaciones. Las anteriores ecuaciones representan un sistema de (3) ecuaciones: σ Cl (αa ) (2) =0 (3) (Clα − δ2 ) αa2 − (Clα θa + δ1 ) αa − δ0 = 0 (4) r6 λi − 7 Helicópteros () σ Cd (αa ) =0 (λc + κλi ) + σ Cl (αa ) Actuaciones 12 8 ! + 3λc Autorrotación 18 / 31 Autorrotación axial. Modelo elemento de pala. V Problema: dado un ángulo de paso colectivo, θa y denido el helicóptero determinar la velocidad de descenso en autorrotación λc . Se trata de un problema directo. A partir de la ecuación (4) se determina αa . Despejando λi de la ecuación (3) y sustituyendo en (2) se obtiene una ecuación para λc . Una vez obtenida λc empleando la ecuación (1) se obtiene Ω y por tanto se determina Vc = λc ΩR Helicópteros () Actuaciones Autorrotación 19 / 31 Autorrotación en avance. Modelo elemento de pala. I Ecuación de la energía: Pg = Pc + Pi + P0 + Pf + Ptr = 0 En el vuelo de avance se suele despreciar la potencia asociada a la del rotor de cola. Por tanto, en forma adimensional, esta ecuación se escribe como: (λc + κλi ) CT + Helicópteros () σ Cd 0 8 1 + Kµ µ 2 + Actuaciones 1f 3 µ =0 2A Autorrotación 20 / 31 Autorrotación en avance. Modelo elemento de pala. II Ecuación de condición de autorrotación. Teniendo en cuenta que el ángulo de entrada de corriente se expresa como φ = Up /UT = Cd /Cl por lo que la condición de autorrotación se expresa de la misma forma. Es decir: δ0 + δ1 αa + δ2 αa2 αa = θa + Clα αa Coeciente de tracción: dado que se considera que todo el rotor se encontrará funcionando con un ángulo de ataque uniforme αa el coeciente de tracción se puede expresar como: CT = Helicópteros () Z 1 σ Cl (αa ) 0 2 (x + µ sin ψ) 2 Actuaciones dx = σ Cl (αa ) 6 3 1 + µ2 2 Autorrotación 21 / 31 Autorrotación en avance. Modelo elemento de pala. III Igualmente la ecuación de equilibrio de fuerzas en la dirección vertical proporciona una ecuación para determinar la velocidad del rotor en autorrotación, que en este caso T =W ΩR = s 6W 1 ρ Aσ Cl (αa ) 1 + 32 µ 2 proporciona la velocidad de rotación en autorrotación. Helicópteros () Actuaciones Autorrotación 22 / 31 Autorrotación en avance. Modelo elemento de pala. IV Ecuación de velocidad inducida en descenso. La hipótesis que se suele realizar en el descenso en autorrotación es que el ángulo de ataque del rotor coincide aproximadamente con el ángulo de inclinación de la trayectoria. Por tanto la relación entre la velocidad inducida y la velocidad de descenso es: CT =0 λ − µ tan αr − p 2 µ2 + λ 2 λi = λ − µ tan αr Helicópteros () Actuaciones Autorrotación 23 / 31 Autorrotación en avance. Modelo elemento de pala. V Sistema de ecuaciones. Las anteriores ecuaciones representan un sistema de (4) ecuaciones: (λc + κλi ) σ Cl (αa ) 6 1f 3 σ C (α ) 1 + µ 2 + d a 1 + Kµ µ 2 + µ3 = 0 2 8 2A C =0 λ − µ tan αr − p T 2 µ2 + λ 2 Clα − δ2 αa2 − s ΩR − (5) λi = λ − µ tan αr (6) Clα θa + δ1 αe − δ0 = 0 6W 1 =0 ρ Aσ Cl (αa ) 1 + 32 µ 2 (7) (8) Problema: dado un ángulo de paso colectivo, θa , una velocidad de avance Vh y denido el helicóptero determinar la velocidad de descenso en autorrotación λc . Se trata de un problema que requiere iterar. Helicópteros () Actuaciones Autorrotación 24 / 31 Algoritmo I Denido el helicóptero, dado el paso colectivo θa y la velocidad de avance horizontal Vh 1 2 3 Mediante (7) se determina αa Mediante las características aerodinámicas se determina Cl (αa ) y Cd (αa ) Empleando (8) y µ = Vh /(ΩR ) se obtiene µ=q 4 1 6W ρ Vh2 ACl (αa )σ − 32 Suponer αr1 = 0,0 while ε > TOL αrj = αrj +1 De (6) se obtiene λ y λi Helicópteros () Actuaciones Autorrotación 25 / 31 Algoritmo II Empleando λc = µ tan αr y usando (5) se obtiene Cp + Cpf 1 κλi + 0 αrj +1 = arctan − µ CT ε = abs (αrj +1 − αrj ) end Helicópteros () Actuaciones Autorrotación 26 / 31 Autorrotación en avance. Aproximación. I Basándose en el método de la energía de las actuaciones autores como Leishman emplean la siguiente aproximación. Ecuación de la energía: Pg = Pc + Pi + P0 + Pf + Ptr = 0 En el vuelo axial se suelen despreciar la potencia asociada a la del rotor de cola. Por tanto, en forma adimensional, esta ecuación se escribe como: (λc + κλi ) CT + Helicópteros () σ Cd 0 8 1 + Kµ µ 2 + Actuaciones 1f 3 µ =0 2A Autorrotación 27 / 31 Autorrotación en avance. Aproximación. II Ecuación de velocidad inducida en descenso. Imponiendo la hipótesis de alta velocidad y por tanto vuelo en el plano del rotor, αr ≈ 0 entonces: CT λi = 2µ Condición de autorrotación: imponiendo que el coeciente de potencia sea nulo se tiene una expresión para la velocidad de descenso: 1 κ CT λc = − − 2µ CT Helicópteros () σ Cd 0 8 Actuaciones 1 + Kµ µ 2 1f 3 + µ 2A Autorrotación 28 / 31 Diagrama de descenso I En general, se representa la velocidad de descenso en función de la velocidad de avance en autorrotación. Vh Vmin Vd;min µ d;min Vopt C B A D1 D2 Vd Helicópteros () Actuaciones Autorrotación 29 / 31 Diagrama de descenso II Punto A: descenso en autorrotación de máximo alcance y por tanto menor ángulo de planeo. Punto B: descenso en autorrotación con velocidad (módulo) mínima. Punto C: descenso en autorrotación con menor velocidad vertical. Puntos D1 y D2 : posibles trayectorias de descenso en autorrotación a dos diferentes velocidades de avance. Helicópteros () Actuaciones Autorrotación 30 / 31 Curva altura-velocidad h Zona no segura de autorrotación Zona segura de autorrotación Zona no segura de autorrotación V1 Helicópteros () Actuaciones Autorrotación 31 / 31