TEORÍA DE MECANISMOS 4.- DINÁMICA DE MECANISMOS
Anuncio

TEORÍA DE MECANISMOS
4.- DINÁMICA DE
MECANISMOS
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
1
Principio de superposición de fuerzas sobre
mecanismos
En un eslabón de un mecanismo, en un instante t, hay equilibrio
dinámico
Principio de superposición de fuerzas.
JG
F1 ⇒
JJG
F2 ⇒
JG JJG JJG
R1P , M F1en P
JG JJG JJG
R 2P , M F2en P
{
{
}
}
#
#
JJG
JG JJG JJG
Fk ⇒ R kP , M Fk en P
sol. total = ∑ sol. parciales
{
i
siendo i el número de
fuerzas actuantes
Reducción del
sistema de
fuerzas en P
}
JJJG k JJJG
R P = ∑ R iP
i =1
JJJG k JJG JJG
M P = ∑ M Fi en P
i =1
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
2
Equivalente dinámico/energético de un
mecanismo de 1gdl
Análisis de la energía cinética en mecanismos. Transmisión
de fuerzas en mecanismos. Caso de 1gdl
Sistema
mecánico (1 gdl)
+
G Sistema de
∑ F fuerzas
actuantes
Mecanismo
manivela de
salida (1 gdl)
+
Fuerza reducida
JG
R
Sistemas equivalentes
energéticamente: el
trabajo instantáneo
producido por la fuerza
reducida en el punto de
reducción P es el
mismo que el
producido por el
sistema de fuerzas
actuantes (externas)
JG
R ≡ Fuerza reducida en A
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
3
Equivalente dinámico/energético de un
mecanismo de 1gdl
(1) Si un sistema mecánico no está en equilibrio, en un instante t, SI
QUEREMOS CALCULAR LA FUERZA E QUE HABRÍA QUE PONER EN EL PUNTO A
DE UN ESLABÓN DADO PARA LOGRAR EL EQUILIBRIO, SE DEBE CUMPLIR (2):
(1)
JG JJG
∑ Pi ⋅ vPi ≠ 0
3
i =1
JG JJG JG JJG
(2) ∑ Pi ⋅ v Pi + E ⋅ v A = 0
3
i =1
JG
E
JG
E
A LOS DOS SISTEMAS MECÁNICOS SE LES PUEDE APLICAR EL PRINCIPIO DE LOS TRABAJOS VIRTUALES.
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
Fuerza reducida en A
4
Equivalente dinámico/energético mecanismo de
1gdl
E, EQUILIBRA LAS FUERZAS F QUE ACTÚAN.
–E , EQUIVALE A LAS FUERZAS F QUE ACTÚAN, EN EL SENTIDO DE PRODUCIR
EL MISMO TRABAJO QUE ELLAS.
EN LA FIGURA DE LA IZQUIERDA SE MUESTRA EL MECANISMO AFECTADO
POR TRES FUERZAS SIN EQUILIBRAR
EN LA FIGURA DE LA DERECHA SE MUESTRA EL MECANISMO AFECTADO POR
LA FUERZA REDUCIDA, QUE SUSTITUYE A LAS FUERZAS.
FR A=–E
X
X
X
A LOS DOS SISTEMAS MECÁNICOS SE LES PUEDE APLICAR EL PRINCIPIO DE LOS TRABAJOS VIRTUALES.
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
Fuerza reducida en A
5
Reducción en un punto A de una
manivela (equilibrio)
Fuerza reducida
JG
Fuerza R reducida
sobre el punto A
del mecanismo
JG
JG
R = −E
Fuerza equilibrante
JG
Fuerza E con la
que se opone el
mecanismo
Se considera que no hay rozamiento entre
eslabones ya que si JG
no habría una
JG
E
indeterminación
en
JG en R y por tanto
G
G ,
debido a que R fluctúa entre: ⎡ Frozmin , Frozmax ⎤
⎣
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
⎦
6
Equivalente dinámico/energético de un
mecanismo de 1gdl
La dinámica del mecanismo de 1 g.d.l.:
JG
JJG
⎡ Pi ,i ⎤ → ⎡ FA , A ⎤
⎣ ⎦ ⎣
⎦
La dinámica del mecanismo es reproducida
por el modelo dinámico reducido en A.
Estudio energético comparado del
mecanismo y su reducción
E cinetica
Mecanismo
E cinetica
Mecanismo
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
= ∑ E cinetica
i
eslabones
i
manivelas
i = j + k = j + k1 + k 2
= ∑ E cinetica + ∑ E cinetica
k
bielas
7
Equivalente dinámico/energético de un
mecanismo de 1gdl
E cinetica
Mecanismo
E cinetica
Mecanismo
E cinetica
Mecanismo
reducido A
= ∑ E cinetica + ∑ E cinetica + ∑ E cinetica
i
manivelas
bielas
traslacion
k1
k2
bielas
tras + rot
⎛ 1
⎞
1
1
1
2
2
2
2
= ∑ IOi ωi + ∑ M biela Vk1 + ⎜ ∑ M biela VG k2 + ∑ IG k2 ωk 2 ⎟
2 k2
i 2
k1 2
⎝ k2 2
⎠
E cinetica
1
Mecanismo
= M A VA2
M reducida A = M A = 2
2
VA2
2
M reducida A
2
⎛ VG ⎞
⎛ ωi ⎞
= ∑ M bielas ⎜
⎟ + ∑ I Oi ⎜
⎟ + ∑ IG K2
k1 ,k 2
i
k2
⎝ VA ⎠
⎝ VA ⎠
⎛ ωk 2 ⎞
⎜
⎟
V
⎝ A ⎠
2
Dado un mecanismo, la masa reducida es independiente de la velocidad adquirida
⎛V ⎞
M reducida A = f ⎜ G ⎟
⎝ VA ⎠
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
8
Equivalente dinámico/energético de un
mecanismo de 1 gdl
Fuerza resistente
reducida en A
Masa
reducida en A
9 Balance de pares
reducidos en A:
Par reducido en A
JJJG JJJJJG JJJJG
M A = M mA − M rA
9 Balance de fuerzas
reducidas en A:
Fuerza motriz
reducida en A
JJG JJJG JJG
FA = FmA − FrA
Reducida de los
esfuerzos
Reducida de los
motrices
esfuerzos
resistentes
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
Fuerza
reducida en A
JJG JJJJJG
FA = − FeqA
Fuerza reducida
en A
“Cinemática y dinámica de
Máquinas” A. de Lamadrid, A. de
Corral, UPM, Madrid 1992
Fuerza
equilibrante en A
9
Análisis del mecanismo en el punto A de la
manivela de salida
Fuerza reducida en A
JJJG
FmA
JJG
FrA
JJG
FA
FUERZA MOTRIZ
FUERZA RESISTENTE
FUERZA REDUCIDA
m -> motriz
r -> resistente
Punto de
reducción
“Cinemática y dinámica de
Máquinas” A. de Lamadrid, A. de
Corral, UPM, Madrid 1992
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
10
Reducción de fuerzas sobre mecanismos
Técnicas de obtención de las
Fuerzas reducidas
Fuerzas equilibrantes
en un mecanismo
Método de las velocidades virtuales
Método de reducción de fuerzas
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
11
Principio de los trabajos virtuales sólidos rígidos
articulados sin rozamiento en equilibrio dinámico
Un movimiento virtual del mecanismo compatible
con los enlaces, el trabajo virtual producido por las
fuerzas activas es nulo.
JG
Pi ,
JJJG
δPi
JG
Pi ,
JJJG
δPi
JG JJJG
∑ Pi ⋅ δPi = 0
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
Fuerzas actuantes sobre los
eslabones del mecanismo
Desplazamiento virtual en el
punto de aplicación de cada
fuerza
JG JJG
∑ Pi ⋅ vPi = 0
12
PTV (aplicación a los n eslabones de un mecanismo, a las
m fuerzas en cada eslabón)
JJG
G
v Pi = ω⋅ CIR Pi ⋅ τ
JJJG
G
δPi = dα ⋅ CIR Pi ⋅ τ
dα
ω=
dt
JJJG JJG
δPi = v Pi ⋅ dt
Luego,
JG JJJG
∑ Pi ⋅δPi = 0
JG JJG
∑ Pi ⋅vPi = 0
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
13
Método de las velocidades virtuales
Aplicando el principio de los trabajos virtuales.
Mecanismo en
equilibrio
Cada miembro
JJJG
∑ Fext' (elemento)
JJJG
∑ Fext
+
JJG
R'
+
JG
R (reacciones apoyos)
(apoyos)
En equilibrio
Consideramos un desplazamiento virtual
PTV
El trabajo virtual realizado por las fuerzas que actúan sobre el mecanismo en
un instante dado t será nulo (las fuerzas exteriores son todas las que no son
reacciones entre eslabones)
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
NOTA: el trabajo virtual de las reactivas es
nulo. En las articulaciones se anulan 2 a 2. En
los apoyos fijos el trabajo realizado es nulo
14
Aplicación del PTV al cálculo de la fuerza reducida en A,
ante las fuerzas motrices Pi
JG
P1 ,
JJG
Datos: P2 ,
JJG
P3 ,
JJG
v1
JJG
v2
JJG
v3
Reducción en A
JG JJG
∑ Pi ⋅ vPi ≠ 0
3
i =1
(1) Puesto que el sistema
mecánico no está en
equilibrio
JG JJG
JJG JJJG
∑ Pi ⋅ vPi + ∑ R j ⋅ vR j = 0
3
i =1
j
(3) El sistema de fuerzas:
(2) Si reduzco
JJJG de fuerzas
JG JJG JJG el sistema
P1 , P2 , P3 en A: FR
{
JG JJG JJG JJJG
P1 , P2 , P3 , − FR A
}
Si está en equilibrio
A
P1 ⋅ v1 ⋅ cos α P1 + P2 ⋅ v 2 ⋅ cos α P2 + P3 ⋅ v3 ⋅ cos α P3 + (− FR A ⋅ v A ) = 0
JJG JG
Universidad Carlos III de Madrid
Proyección sobre v P de P
i
i
Departamento de Ingeniería Mecánica
15
Caso particular
JJG JG
P2 = E( Fuerza _equilibrante)
JG
P1
1 fuerza activa:
JG JJG JJG JJG
P1 ⋅ v1 + P2 ⋅ v 2 = 0
P1 ⋅ v1 ⋅ cos α P1 + P2 ⋅ v 2 ⋅ cos α P2 = 0
P1 ⋅ cos α P1
P2 ⋅ cos α P2
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
v2
=−
v1
proy ( P1 , v P1 )
v2
=−
proy ( P2 , v P2 )
v1
16
Análisis gráfico. Fuerza reducida
Análisis de la energía cinética en mecanismos. Transmisión
de fuerzas en mecanismos. Caso de 1gdl
Sistema
mecánico (1 gdl)
+
G Sistema de
∑ F fuerzas
actuantes
Mecanismo
manivela de
salida (1 gdl)
+
Fuerza reducida
JG
R
Sistemas equivalentes
energéticamente: el
trabajo instantáneo
producido por la fuerza
reducida en el punto de
reducción P es el
mismo que el
producido por el
sistema de fuerzas
actuantes (externas)
JG
R ≡ Fuerza reducida en A
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
17
Reducción de fuerzas sobre mecanismos
Técnicas de obtención de las
Fuerzas reducidas
Fuerzas equilibrantes
en un mecanismo
Método de las velocidades virtuales
Método de reducción de fuerzas
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
18
Método de reducción en P (gráficamente)
NOTA: descomposición vectorial.
Llevando una fuerza a P y las
restantes componentes aplicarlas
en:
las fuerzas que pasan
Apoyos fijos
por los puntos fijos no
crean trabajo externo
ó
Las direcciones que puedan ser
absorbidas
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
19
Reducción de una fuerza aplicada sobre A en el
punto de reducción P
F1 Absorbida por el apoyo fijo O1
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
20
Técnicas gráficas de reducción de fuerzas exteriores a un
punto cualquiera
En una pieza donde actúan
fuerzas exteriores aplicar la
teoría de los vectores
deslizantes
G
Para pasar los vectores fuerza F
de una pieza a otra hay que utilizar los
puntos comunes de las articulaciones.
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
21
Hallar la fuerza reducida en A debido a F1
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
22
Hallar la fuerza reducida en A debido a F1
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
23
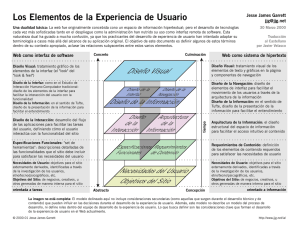
Ejemplo de reducción de la fuerza P
en D al punto A
JJG
JJJG JJJG JG
Secuencia: 1) PD = Q D + R D , Q pasa por el punto fijo O6
JJJG JJJG
2) R D = R C ,
transfiero R del eslabón 5 al e
JJJG JJJG
3) R C = R N , N ∈ al eslabón 3.
Punto de encuentro de RC con
la dirección del eslabón 4
JJJG JJG JJG
4) R N = SN + TN , SN pasa por el
punto fijo O4
JJG JJG
5) TN = TA , A ∈ al eslabón 3.
JJG JJG JJG
6) TA = FA + VA , V pasa por el
punto fijo O2
Trabajo mecánico = 0
JJG JJJJG JJJG JJJG JJG
Luego: PD = Q O6 + SO4 + VO2 + FA
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
El trabajo mecánico de PD= El trabajo mecánico de FA
24
Ejemplo de reducción de la fuerza P
en E al punto A
Secuencia:
JJG JJG
1) PE = PM , M punto de intersección de P con la dirección del
JJG JJJG eslabón
JJJG JJJG 6JJJJG
2) PM = R M + Q M , Q M = QO6
Pasa por el punto fijo O6
JJJG JJJG JJJG JJJG JJJG JJG JJG JJG JJJG
3) R C = R M , R N = R C , R N = SN + TN , SN = SO4
O4 punto fijo
JJG JJG JJG JJG JJG JJG JJJG
4) TA = TN , TA = VA + FA , VA = VO2
O2 punto fijo
Luego:
JJG JJJJG JJJG JJJG JJG
PE = Q O6 + SO4 + VO2 + FA
Trabajo mecánico = 0
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
El trabajo
mecánico de PE
=
El trabajo
mecánico de
FA
25
CÁLCULO DE LA ENERGÍA CINÉTICA DE UN MECANISMO:
Sistema de masas puntuales mi
equivalentes dinámicamente al eslabón (sólido rígido)
Dinámica eslabón:
M T , IG
Sólido rígido
m1
G
mi
G’
M T = ∑ mi
IG = ∑ mi ⋅ riG2
JJG G
G'= G
∑ mi ⋅ riG = 0
(1)
⎯⎯
→
(2)
⎯⎯
→
(3)
⎯⎯
→
MT
IG
G
m2
Sistema de i
masas puntuales
localizadas sobre
el eslabón sin
masa
(
)
Condiciones de equivalencia
Caso (0):i
= 1, m1 → (1) M T = m1
⇒ m1 ≠ 0
2
⇒ r1G ≠ 0
(2) IG = m1 ⋅ r1G
JJG G
(3) m1 ⋅ r1G = 0 No se cumple
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
Luego, no podemos reducir un sólido rígido a
una única masa.
26
Sistema de masas puntuales mi equivalente
dinámicamente al eslabón: sólido rígido
Caso (1): en el plano
MT
IG
G
2
2
+ m 2 ⋅ r2G
∗
(2) IG = m1 ⋅ r1G
JJG
JJG G
(3) m1 ⋅ r1G + m 2 ⋅ r2G = 0
G
m1
i = 2, m1 , m 2 → (1) M T = m1 + m 2 ∗
m2
Los dos puntos deben alinearse
con el centro de masas
G
m2
m1
(3) m1 ⋅ r1G + m 2 ⋅ r2G = 0
∗
Tres ecuaciones con 4 incógnitas: m1, m2, r1G, r2G,
luego deberemos seleccionar un dato, para obtener los demás.
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
27
Sistema de masas puntuales mi equivalente
dinámicamente al eslabón: sólido rígido
Caso (2): en el plano
i = 3, m1 , m 2 , m3 → (1) M T = m1 + m 2 + m3
r1
m1
G
r3
2
2
2
+ m 2 ⋅ r2G
+ m3 ⋅ r3G
(2) IG = m1 ⋅ r1G
JJG
JJG
JJG G
(3) m1 ⋅ r1G + m 2 ⋅ r2G + m3 ⋅ r3G = 0
m3
r2
3 ecuaciones con 9 incógnitas
m2
IG
m1 =
r1
m1 , m 2 , m3
r1x , r1y
r2x , r2 y
r3x , r3y
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
28
Sistema de masas puntuales mi equivalente
dinámicamente al eslabón: sólido rígido
Caso (3): en el plano
G
3 masas alineadas en el punto G
3 ecuaciones con 6 incógnitas
r1G , r2G , r3G
Caso (4): en el plano
3 masas alineadas con el punto G. Y en el
punto G disponemos de una de ellas m3 = m G
3 ecuaciones con 5 incógnitas
m1 , m 2 , m G
r1G , r2G
⎛
⎞
IG
si
M
=
⇒
m
=
0
⎜
⎟
T
G
r
⋅
r
1G
2G
⎝
⎠
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
m3
m1 , m 2 , m3
m2
m1
9 Si suponemos elegidos r1G , r2G
(datos), podemos obtener:
m1 =
IG
r1G ⋅ ( r1G + r2G )
m2 =
IG
r2G ⋅ ( r1G + r2G )
mG = M T −
IG
r1G ⋅ r2G
m1 , m 2 , m G
29
REPRESENTACIÓN GRÁFICA
b) alineadas
1) M T = m1 + m 2 + m3
G
JG
JG
JG G
2) ri (G); m1 ⋅ r1 + m 2 ⋅ r2 + m3 ⋅ r3 = 0
3) m1 ⋅ r12 + m 2 ⋅ r22 + m3 ⋅ r32 = IG
JG
m1 ⋅ r1
JG
m3 ⋅ r3
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
JG
m 2 ⋅ r2
30
Sistema de masas puntuales mi equivalente
dinámicamente al eslabón: sólido rígido
Caso (5): en el plano
3 masas alineadas con el punto G, y en G disponemos la tercera m3 = m G
MT
⎧
m
=
⎪ 1 r + r ⋅ r2G
IG
⎪
1G
2G
⇒ mG = 0 ⎨
si M T =
r1G ⋅ r2G
⎪m = M T ⋅ r
2
1G
⎪
+
r
r
El sistema se ha simplificado y queda ⎩
1G
2G
Si imponemos la condición:
reducido a 2 masas posicionadas en r1G , r2G
m1 , m 2 ⇒ dato
Que son conjugados respecto al punto G
m2
G
m1
mG=0
Radio de giro
IG
M T ⋅ rG2
= MT ≡
= MT
r1G ⋅ r2G
r1G ⋅ r2G
NOTA: recordando el concepto de punto de percusión en un eslabón al rG = r1G ⋅ r2G
2
articularse sobre un punto fijo, 2 será el centro de percusión, del eslabón
considerado, suponiendo al eslabón girado alrededor de 1.
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
31
Cálculo gráfico del punto E conjugado
del A sobre el G
MT
IG
mE =
iG radio de
giro del
eslabón
MT
⋅ GA
AE
mG = 0
NOTA 1: hay ∞
parejas E, A puntos
conjugados sobre G
NOTA 2: Normalmente
A es una articulación
mA =
MT
⋅ GE
AE
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
32
Sistema dinámico equivalente.
Casos prácticos:
Centro de
percusión
Sistema dinámico equivalente para:
9 Manivela,
balancín:
mE
mG = 0
mo
9 Biela:
mA
No tiene
efecto
dinámico
mE
mG = 0
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
33
Sistema dinámico equivalente.
Caso del cuadrilátero articulado
(a) Localización de los puntos
(b) Localización de los sistemas de
dinámicamente interesantes.
masas equivalentes en cada eslabón
G, E
{ARTICULACIÓNi,Ei}
Centros de
Centros
de masa
percusión
**
**
*
***
Al estar m 2O2 y m 4O4
posicionadas en puntos
fijos, no tiene efectos
dinámicos
***
*
JJJG
G
Par inercia (m4 O4 ) = 0
Universidad Carlos III de Madrid
Departamento de Ingeniería Mecánica
I m4 O4 |O4 = 0
I m2 O2 |O2 = 0
m 2O2
G
G
Finercia (m4 O4 ) = 0
JJJG G m 4O
4
a O2 = 0
JJJG G
a O4 = 0
34