- Ninguna Categoria
una estimación óptima de los ratios de enlace para el cálculo de la
Anuncio
Una estimación óptima de los ratios de enlace para el cálculo de la Provisión para Siniestros Pendientes
UNA ESTIMACIÓN ÓPTIMA DE LOS RATIOS DE
ENLACE PARA EL CÁLCULO DE LA PROVISIÓN PARA
SINIESTROS PENDIENTES
Ana Isabel Cid Cid
Juan Antonio Ibarra Alfaraz
Departamento de Economía Financiera y Contabilidad II
Universidad Rey Juan Carlos
RESUMEN
La correcta determinación de la denominada Provisión para Siniestros
Pendientes (PSP), concepto que agrupa tanto a los siniestros pendientes de declaración
(IBNR) como a los siniestros pendientes de liquidación o pago (IBNER), es uno de los
problemas más importantes de la ciencia actuarial.
El objetivo de este trabajo es plantear el problema del cálculo de la PSP desde
un punto de vista bayesiano. El método de cálculo que proponemos considera la
situación concreta de cada compañía, al incorporar al proceso de estimación su actitud
frente a las consecuencias derivadas de los errores de estimación.
La Teoría de la decisión estadística es el marco teórico desde el que se aborda el
problema planteado. La adopción de este enfoque da lugar a unos estimadores óptimos e
interpretables desde un punto de vista bayesiano, con las ventajas inherentes a esta
metodología. En particular, la intervención del decisor va más allá de la mera gestión de
los datos para convertirse en parte activa de la resolución del problema.
XIII Jornadas de ASEPUMA
1
Ana Isabel Cid Cid
1. INTRODUCCIÓN
Las Provisiones Técnicas son Reservas de las Entidades Aseguradoras, cuyo fin
es el de recoger las dotaciones fundamentales destinadas a mantener recursos para
próximos ejercicios con el fin de adecuar gastos e ingresos. De entre las diferentes
clases de Provisiones Técnicas en los seguros generales, o no-vida, solo será objeto de
interés en este trabajo la Provisión para Prestaciones, también denominada Provisión
para Siniestros Pendientes (PSP). El concepto de siniestros pendientes agrupa siniestros
pendientes de declaración, conocidos como IBNR (Incurred But Not Reported) y
siniestros pendientes de pago o liquidación conocidos, entre otros nombres, como
IBNER (Incurred But Not Enough Reserved).
En general, las legislaciones prevén, bajo ciertas condiciones, el uso de métodos
estadísticos para el cálculo de la PSP por parte de las Entidades Aseguradoras. En
cuanto a los diferentes métodos de cálculo desarrollados para la PSP hay que decir que
son muchos y con enfoques muy diferentes, constituyendo una importante materia de
investigación en los últimos tiempos
de la Ciencia Estadística y Actuarial. La
importancia del problema es de absoluta actualidad y buena prueba de ello son las
numerosas publicaciones existentes, existiendo dentro del ámbito asegurador gran
preocupación ante el temor de que las Provisiones Técnicas puedan resultar
inadecuadas, con los métodos actuales de cálculo.
En este contexto, es posible plantear el problema del cálculo de la PSP desde un
punto de vista nuevo. A lo largo de este artículo se propone un modelo estocástico para
la siniestralidad pendiente de una Compañía de Seguros, aplicable tanto para el cálculo
de las IBNR como de las IBNER o de ambas en conjunto, el cual posibilita la
incorporación de información que tenga el actuario sobre el problema, a través de la
distribución a priori. La metodología utilizada, por tanto, es bayesiana. La estimación de
la PSP se aborda, como suele ser habitual en este enfoque, desde un marco decisional,
con funciones de pérdida cuadrática. En este sentido, todos los estimadores así
obtenidos, estimadores de mínimos cuadrados, son óptimos.
2
XIII Jornadas de ASEPUMA
Una estimación óptima de los ratios de enlace para el cálculo de la Provisión para Siniestros Pendientes
2. DEFINICIONES Y ELEMENTOS BÁSICOS
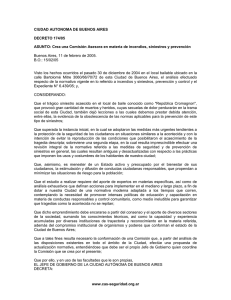
La mayoría de los métodos para el cálculo de la Provisión para Siniestros
Pendientes parten del denominado triángulo de siniestros o triángulo run-off, donde la
representación de las cuantías de los siniestros se hace en forma matricial.
Concretamente, a través de dos variables: año de origen ( i ) y año de desarrollo ( j ).
j = 1 j = 2 ........ j
…….
j = n-1 j = n
i=1
X1,1
X1,2
.......
X1,j
.......
X1,n-1
X1,n
i=2
X2,1
X2,2
.......
X2, j
.......
X2,n-1
X2,n
:
..
:
:
..
:
I
Xi,1
Xi,2
…… Xi, n-i+1 Xi, n-i+2 ……
Xi, n
:
..
:
:
..
:
i = n-1 Xn-1,1 Xn-1,2 Xn-1,3 ……
……
……
X n- 1,n
i=n
……
……
X n,n
Xn,1
Xn,2
…… ……
Aunque cabrían otras posibilidades, en lo que sigue, se asumirá que la
variable X i , j que integra la matriz anterior, representará la cuantía acumulada de los
siniestros de origen i y anotados antes del fin del año i + j − 1 .
Las celdas de la diagonal principal de abajo a arriba, es decir, de las columnas
j = n − i + 1 , representarán los últimos datos disponibles, esto es, los datos disponibles
en el año actual n , sobre los siniestros con origen en el año i . La zona de la matriz a la
derecha de esta diagonal se integra de datos no disponibles aún.
Denominaremos X n×n a la matriz que contiene toda la información. El objetivo
consistirá en estimar dicha matriz.
Por otro lado, la cuantía acumulada de la siniestralidad tiende a estabilizarse con
el transcurso de los años. En la práctica, esto equivale a considerar que para un año de
desarrollo suficientemente grande, esto es, j = n , se tendrá que X i , j = X i , j +1
, y por
tanto f i , j −1 = 1 , ∀j ≥ n con i = 1,2,..., n .
XIII Jornadas de ASEPUMA
3
Ana Isabel Cid Cid
En consecuencia, la Provisión por Siniestros Pendientes correspondiente al año
de origen i , ( i = 1, 2,..., n ) a dotar al final del año n , será PSPi = X i , n − X i , n − i +1 y el total
n
n
i =2
i =2
de la Provisión se obtendrá como: PSP = ∑ PSPi = ∑ X i , n − X i , n − i +1 .
En nuestro objetivo de estimar X n×n , consideraremos la variable aleatoria n-
dimensional X = ( X 1 , X 2 , Κ , X n ) la cual representa el volumen
de siniestralidad
acumulada con un mismo origen, a medida que ésta va evolucionando a lo largo de los
años de desarrollo. La tabla completa
X n×n , constituye, entonces, una muestra de
tamaño n del vector aleatorio.
La relación entre las variables marginales X j , puede ser expresada, por
ejemplo, por la siguiente relación funcional exacta entre variables aleatorias:
X 1G j = X j , j = 1,2, Κ , n
[1]
donde la variable aleatoria G j =
Xj
X1
es el denominado ratio de enlace o
transición acumulado que pone en relación el primer año de desarrollo y el j − 1 . Estos
n ratios de enlace constituyen un vector aleatorio n-dimensional G = (G1 , G2 , Κ , Gn )
verificándose la relación matricial X 1 ⋅ G = X n× n .
j −1
Por otro lado, haciendo G j = ∏ Fr , donde Fr son los ratios de enlace entre
r =1
periodos consecutivos, la relación entre las variables marginales puede ser también
expresada de forma equivalente mediante la expresión X j +1 = F j X j , que constituye el
equivalente estocástico a los conocidos ratios de enlace clásicos.
4
XIII Jornadas de ASEPUMA
Una estimación óptima de los ratios de enlace para el cálculo de la Provisión para Siniestros Pendientes
3. PLANTEAMIENTO DEL PROBLEMA
Como es habitual en la estructura bayesiana, el problema se formula en términos
~
del modelo matemático: Θ , H, A, L [ θ ,θ ],π ( θ ) , constituyendo la solución al
(
)
problema la regla de Bayes, resultado de maximizar la utilidad esperada1.
Se identificará cada matriz de resultados, o siniestralidades posibles, con cada
estado de la naturaleza: Θ = {θ n×n = {θ i , j ; i, j = 1,2,...n}} ⊂ M n×n
De entre todas las posibles matrices θ n×n , solo una constituirá el verdadero
estado de la naturaleza, el cual se identificará con la matriz de siniestralidad que será
totalmente completada después de n − 1 años.
No obstante, parece lógico imponer algunas restricciones sobre el conjunto de
estados de la naturaleza, para que éstos sean razonablemente posibles. Así, por ejemplo,
parecerá razonable exigir, en cada posición no observada j > n − i + 1 , que θ i , j ≥ k ≥ 0 .
Estas
condiciones y otras que aparecerán seguidamente podrían emplearse como
información adicional o a priori, la cual a su vez, podría ser modificada mediante la
incorporación de nueva información en el proceso de estimación.
Más concretamente será posible disponer de información sobre θ n × n
suministrada por el triángulo de siniestralidad observada, la cual constituirá el
denominado espacio de información: H = {X i , j ;
j ≤ n − i + 1}
En relación a lo anterior, la consistencia con los datos ya disponibles debería
requerir la coincidencia entre las estimaciones realizadas y el triángulo de siniestralidad
observada. Tal restricción implica asumir una distribución degenerada para aquellos
estados de la naturaleza θ i, j conocidos. Esto es,
1, si θ i , j = X i , j
0, si θ i , j ≠ X i , j
θ i , j ~ π (θ i , j | H ) =
cuando j ≤ n − i + 1 y cualquiera que sea i = 1,2,..., n .
1
Sin pérdida de generalidad, asumiremos que las pérdidas (negativas) pueden ser interpretadas como utilidades. En
tal caso resultaría equivalente el principio de maximizar la utilidad esperada y el principio de minimizar la pérdida
esperada.
XIII Jornadas de ASEPUMA
5
Ana Isabel Cid Cid
El conjunto de posibles acciones o alternativas que denotaremos por A n×n estará
integrado por cada una de las diferentes estimaciones que se pueden hacer de la matriz
~
~
de siniestros o resultados, esto es: A nxn = an×n = X nxn = ai , j = X i , j i , j =1,2 ,....n . Como es
{
(
}
)
obvio, cada matriz estimada de siniestros irá asociada a cada posible matriz estimada de
los ratios de enlace.
Por otro lado, lo señalado en relación con H , tendrá también su reflejo sobre
A n×n , con lo que la alternativa escogida, habrá de verificar necesariamente que:
~
ai , j = X i , j = X i , j , si j ≤ n − i + 1 .
Incorporada la restricción dada por la observación de H , aceptando como
~
relación de referencia la dada por [1] y denotando G j = g j , el proceso de decisión
debería conducir a una estimación de la forma:
a n×n
X 1,1
X 2,1
Μ
=
X i ,1
Μ
X
n ,1
Κ
Κ
Κ
Κ
Κ
Κ
Κ
Κ
X 1, n−1
X 2,n −1
Κ
Κ
X i ,n −i +1
X i ,1 g n −i + 2
Κ
Κ
Κ
Κ
X n ,1 g 2 Κ
X 1, n
X 2,1 g n
Μ
X i ,1 g n
Μ
X n ,1 g n
[2]
Una vez estimada la matriz de siniestralidad, la provisión total a dotar al final
n
del año n se obtendría como PSP = ∑ X i ,1 g n − X i , n − i +1
i=2
Las consecuencias de nuestra elección las evaluamos como discrepancias
existentes entre a n×n y θ n × n . Tomaremos como medida de la discrepancia individual la
~
distancia cuadrática entre el valor estimado θ i , j = ai , j y el que realmente se ha
presentado θ i, j :
[
]
L θ i , j , ai , j = d i , j = (θ i , j − ai , j )
2
y definiremos la pérdida total
n
n
L[θ n×n , an×n ] como la suma aritmética de las pérdidas individuales, d = ∑∑ di , j , lo
i =1 j =1
cual nos permitirá evaluar de manera global las consecuencias derivadas de los errores
de estimación al tomar la acción an×n ∈ A n×n prevaleciendo el estado de la naturaleza
θn×n ∈ Θ .
6
XIII Jornadas de ASEPUMA
Una estimación óptima de los ratios de enlace para el cálculo de la Provisión para Siniestros Pendientes
De nuevo, la consideración del espacio de información H tendrá su reflejo en el
proceso de estimación, condicionando la función de pérdida global, que pasa a
n
escribirse como L[θ n×n , an×n ] = ∑
∑ (θ
2
n
i, j
− ai , j ) .
i = 2 j = n −i + 2
4. ESTIMACIÓN DE LA MATRIZ DE SINIESTRALIDAD
Para la resolución del problema de estimación de la matriz de siniestralidad
consideraremos la relación [1], donde la variable aleatoria G j es el mencionado ratio de
enlace acumulado que nos permite pasar de la primera columna hasta la j-ésima. Tras
incorporar la restricción dada por la observación de H , la consistencia con [1] debería
conducir a una estimación de la forma [2] y a una función de pérdida global dada por
n
L[θ n× n , an× n ] = ∑
∑ (X
2
n
i, j
)
− X i ,1 g j .
i = 2 j = n −i + 2
El objetivo del proceso de estimación deberá consistir en obtener el vector de
(
)
estimaciones g = g 2 , g3 , Κ , g n . Una vez haya sido conseguido este vector, también
pueden obtenerse fácilmente por recurrencia las cantidades f j =
g j +1
gj
, j=1,…,n-1, que
pueden ser interpretadas como los ratios de enlace entre periodos consecutivos.
En este punto damos entrada a ciertas restricciones sobre el conjunto de estados
de la naturaleza, algunas ya adelantadas. En particular, parece natural asumir que la
siniestralidad aún no observada pueda encontrarse entre dos valores, esto es,
θ i , j ∈ [α i , j , β i , j ] , i = 2 ,3,..., n , j = n − i + 2 ,..., n .
Obviamente tal restricción puede ser también formulada de manera equivalente
sobre el conjunto de ratios de enlace: la variable G j | X i ,1 pertenece al intervalo
βi,j
α i,j
= mi , j , M i , j =
, para
X i ,1
X i ,1
j = 2 ,3 ,..., n , sin más que tener en cuenta que
θ i , j = X i ,1G j .
XIII Jornadas de ASEPUMA
7
Ana Isabel Cid Cid
Asumiremos ahora un comportamiento prudente por parte del decisor que le
lleva a asumir que la naturaleza se manifestará de la forma más desfavorable posible. Si
ci,j es el valor por el que se decanta la naturaleza, entonces se tendrá que
1, si θ i , j = ci , j
0, si θ i , j ≠ ci , j
θ i , j ~ π (θ i , j | H ) =
con j = n − i + 2,..., n e i = 2, 3,..., n .
De manera que nuestro objetivo consistirá en
min
Eθ i , j
~
X
θi , j
{ L[θ
i, j
~
,θ i , j
]}
o
n
n
equivalentemente, minmax ∑ ∑ ( X i , j − X i ,1 g j )2 .
gj
X i , j i = 2 j = n −i + 2
Que la naturaleza tome el comportamiento más desfavorable posible, equivale a
admitir que la distancia medida por la función de pérdida, para nuestra matriz de
estimaciones,
sea
máxima.
Por
tanto,
ci , j ( δ i , j ) = δ i , j α i , j + (1 − δ i , j )β i , j = δ i , j mi , j X i ,1 + (1 − δ i , j )M i , j X i ,1 , con:
δ i, j
α i, j + β i, j
1, si g j ≥
2 X i ,1
,
=
0, si g < α i , j + β i , j
j
2 X i ,1
n
lo
n
=∑
que
nos
∑ (c (δ ) − X
permite
n
i,j
i, j
i ,1
ahora
[
~
2
g j ) = L ci , j (δ i , j ),θ i , j
escribir
max ∑
X i, j
n
∑ (X
i, j
− X i ,1 g j ) 2 =
i = 2 j = n −i + 2
]
i = 2 j = n −i + 2
Se
[
tratará
]
ahora
n
~
(
)
min
L
c
δ
,
θ
=
min
∑
i,j
i,j
i, j
~
θi , j
gj
de
resolver
∑ (c (δ ) − X
n
i,j
i, j
el
problema
de
minimización
gj)
2
i ,1
i = 2 j = n −i + 2
Este problema será abordado desde la Teoría de la Regresión, para lo que basta
tener en cuenta que L coincide con la suma de cuadrados del problema de regresión por
el que ci , j se explica mediante H y el conjunto de parámetros g j a través de la
expresión ci , j = ζ (g j , H ) = X i ,1 g j .
8
XIII Jornadas de ASEPUMA
Una estimación óptima de los ratios de enlace para el cálculo de la Provisión para Siniestros Pendientes
Tomando logaritmos en ésta última expresión y definiendo las variables
ci , j
= log ci , j − log X i ,1 y δ ∗j = log g j , L puede ser ahora expresada en
Yi , j = log
X i ,1
[
]
n
términos de las variables transformadas como L ′ Yi , j , δ ∗j = ∑
∑ (Y
n
i, j
− δ ∗j
)
2
, y el
i = 2 j = n −i + 2
problema reformulado en términos de minimizar la nueva función de pérdida L ′ ,
[
]
n
min
L′ Yi , j ,δ ∗j = min
∑
∗
∗
δj
δj
∑ (Y
n
)
2
i,j
− δ ∗j .
i = 2 j = n −i + 2
De la aplicación de la condición necesaria de optimización se tiene que
∂
∂δ ∗j
∑ (Y
n
L ′ = −2
k, j
)
− δ ∗j = 0,
j = 2,3,Κ n , de donde resulta δ ∗j =
k =n − j + 2
n
1
∑ Yk , j ,
j − 1 k = n− j + 2
j = 2 ,3,Κ n .
Esto es,
δ ∗j = log g j =
n
n
n
ck, j
ck , j
1
1
1
Y
=
log
=
log
∑
∑
k, j
∏
j − 1 k =n− j +2
j − 1 k = n − j + 2 X k ,1 j − 1
k = n − j + X k ,1
Y deshaciendo el cambio queda:
n
{ }
g j = exp δ
∗
j
ck , j
=
= j −1 ∏
X
k =n− j + 2
k ,1
j −1
n
∏c
k, j
k =n− j + 2
j −1
∏X
j = 2, 3,Κ , n
,
n
k ,1
k = n− j + 2
expresión que puede ser interpretada como la media geométrica de los ratios más
desfavorables
ci , j
X i ,1
relativos
a
la
columna
j,
habida
cuenta
que
= δ i , j mi , j + (1 − δ i , j )M i , j . Los resultados anteriores son extensibles al caso en que
j=1, sin más que adoptar los convenios
h
h
h +1
h +1
∑ (⋅) = 0 ,∏ (⋅) = 1,0 (⋅) = 1 .
Por otro lado, teniendo en cuenta que
fj =
g j +1
gj
,
j = 1, 2,Κ , n − 1 , g1 = 1 ,
puede interpretarse el cociente entre las media geométricas correspondientes así
obtenidas, como el ratio entre períodos consecutivos,
XIII Jornadas de ASEPUMA
9
Ana Isabel Cid Cid
c k , j +1
∏
k = n − j +1 X k ,1
n
j
fj =
ck , j
j −1
∏
X
k =n− j +2
k ,1
n
∏c
j
=
n
k , j +1
j −1
∏X
k = n − j +1
k =n− j + 2
n
n
n
j
∏X
k = n − j +1
k ,1
j −1
∏c
k ,1
,
j = 1, 2,Κ , n − 1
k, j
k =n− j +2
Por último, el importe a dotar a final del año n en concepto de Provisión para
Siniestros Pendientes resultará ser:
n
n
n
c n
PSP = ∑ X i ,1 g n − X i , n − i +1 = n −1 ∏ k , n ⋅ ∑ X i ,1 − ∑ X i , n − i +1
i=2
i =2
k = 2 X k ,1 i = 2
5. CONCLUSIONES
En este trabajo se ha propuesto un modelo estocástico para la siniestralidad
pendiente de una Compañía de Seguros, que presenta varias ventajas. Resaltamos que el
marco estocástico justifica las variaciones observadas en las estimaciones dadas por los
métodos heurísticos de carácter determinista y que la consideración de la siniestralidad
registrada como un vector aleatorio n-dimensional posibilita el análisis de las posibles
dependencias entre los diferentes periodos de desarrollo, lo que sin duda se ajusta más a
la estructura real del problema.
La Teoría de la Decisión nos ha proporcionado el marco desde donde el
problema ha sido abordado. Con ello se consigue dotarlo de una base formal y una
estructura suficientemente general, cuya primera consecuencia es que los estimadores
así obtenidos, estimadores de mínimos cuadrados, son todos estimadores bayesianos,
resultado de la aplicación de la regla de Bayes, y estimadores óptimos.
Simultáneamente, con la adopción de un marco decisional se dispone de todas las
ventajas inherentes al planteamiento inferencial bayesiano. Con ello se abre la puerta a
la intervención del decisor, no como mero gestor de los datos sino como parte activa,
incluso esencial, en la resolución del problema, al incorporar por la vía de
la
distribución inicial cuya inevitabilidad, por otro lado, se deduce de los conocidos
principios de coherencia, sus creencias y actitudes.
Sin perjuicio de que otras distribuciones puedan ser consideradas, en este trabajo
el conocimiento a priori se ha materializado en una actitud de prudencia del decisor,
moderada por las restricciones impuestas al rango de variación de las siniestralidades
10
XIII Jornadas de ASEPUMA
Una estimación óptima de los ratios de enlace para el cálculo de la Provisión para Siniestros Pendientes
acumuladas y registradas en los distintos periodos de desarrollo. Y ello sin menoscabo
del uso de la siniestralidad observada en periodos anteriores.
6. REFERENCIAS BIBLIOGRÁFICAS
•
ARJAS, E. (1989). “The claims reserving problem in non-life insurance: Some
structural ideas”. Astin Bulletin, 19, 2, 139-152
•
BARNETT, G. y ZEHNWIRTH, B. (1998). “Best Estimates for Reserves”.
Casualty Sociaty Forum.
•
BERNARDO, J.M. y SMITH, A.F.M. (1994). Bayesian Theory. Wiley, Chichester.
•
BUCHANAN, R. (1998).
“The philosophy of reserving”. Casualty Actuarial
Society Forum
•
DE GROOT, M.H. (1970). Optimal statistical decisions. McGraw-Hill, New York.
•
GIL FANA, J.A.
(1995). “Provisiones para siniestros pendientes. Métodos de
cálculo”. Previsión y Seguro, 44, 22-38.
•
KATHLEEN, A., BLUM, DAVID J.O. (1998). “Best Estimate Loss Reserving: An
Actuarial Perspective”. Casualty Actuarial Society Forum.
•
LINDLEY, D.V. (1965). Introduction to Probability and Statistics from a Bayesian
Viewpoint. (2 vols.). University Press, Cambridge.
•
MACK, T. y VENTER, G.
(2000). “A comparison of stochastic models that
reproduce chain ladder reserves estimates”. Insurance: Mathematics and Economics,
26, 101-107.
•
VEGAS ASENSIO, J. (1995). “Análisis metodológico de los métodos estadísticos
en el cálculo de las reservas o provisiones técnicas de prestaciones en los seguros no
vida”. Anales del Instituto de Actuarios Españoles, Tercera Época, 1, 163-199.
•
WALD, A. (1950). Statistical Decision Functions. Wiley, New York.
XIII Jornadas de ASEPUMA
11
 0
0
Anuncio
Documentos relacionados
Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados