Cinética
Anuncio

Cinética
Índice
1. Introducción
2
2. Cantidad de movimiento
2.1. Teorema del centro de masas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
2
3. Momento cinético
3.1. Teorema de König relativo al momento cinético . . . . . . . . . . . . . . . . . . . . .
3
3
4. Energía cinética
4.1. Teorema de König relativo a la energía cinética
. . . . . . . . . . . . . . . . . . . . .
4
4
punto de velocidad nula
. . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . .
5
5
5
5
6. Atributos cinéticos de un sólido libre
6.1. Cantidad de movimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2. Momento cinético . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3. Energía cinética . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
6
6
6
A. Teorema del transporte de Reynolds
7
5. Atributos cinéticos de un sólido con
5.1. Cantidad de movimiento . . . . . .
5.2. Momento cinético . . . . . . . . . .
5.3. Energía cinética . . . . . . . . . . .
un
. .
. .
. .
1.
Introducción
La Cinética es la parte de la Mecánica encargada de definir y calcular los atributos cinéticos de
un sistema material arbitrario X en un movimiento dado.
Recalcar el hecho de que no existe ninguna restricción sobre el tipo de movimiento, y eso incluye
al referente del mismo, hasta el punto de que será habitual usar un movimiento genérico que satisfaga
las ligaduras geométricas. El movimiento real que tenga el sistema vendrá determinado a posteriori
por las ecuaciones generales de la Dinámica.
Con el movimiento, además de las magnitudes de la geometría de masas, hacemos intervenir el
tiempo, por lo que ya tenemos las tres magnitudes fundamentales de la Dinámica: masa, longitud y
tiempo.
Los atributos cinéticos de interés van a ser:
Cantidad de movimiento
Momento cinético
Energía cinética
Pasemos a definirlos y a calcularlos.
2.
Cantidad de movimiento
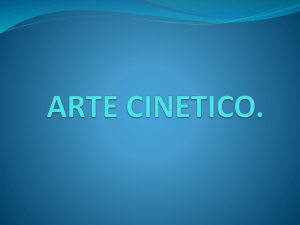
Sea O1 x1 y1 z1 el sistema referente del movimiento a considerar S1 .
Se define la cantidad de movimiento de una partícula
material M i o la cantidad de movimiento elemental como:
c̄i = mi v̄ i
↔
dc̄ = v̄dm
X (i = 1, . . . , N)
Es una magnitud vectorial con dimensiones de masa
por longitud dividido por tiempo: [c̄] = M L T−1 .
Se define la cantidad de movimiento de un sistema material X como una magnitud extensiva de la siguiente forma:
Z
N
X
i i
C̄ =
m v̄
↔ C̄ =
v̄ dm
i=1
z1
M i (mi )
r̄ i
O1
v̄ i
y1
X
Si consideramos el sistema de vectores deslizantes can- x1
tidad de movimiento (c̄i = mi v̄ i , dc̄ = v̄dm), la cantidad de
movimiento será su resultante, que como tal se considera
un vector libre.
El cálculo de esta magnitud parece ligado a la resolución de la integral correspondiente. Sin
embargo, se va a enunciar y demostrar un teorema que simplifica el cálculo de forma notable.
2.1.
Teorema del centro de masas
Por la definición de centro de masas se tiene:
R
Z
r̄dm
G
G
X
⇒ mr̄ =
r̄dm
r̄ = R
dm
X
X
Derivando respecto al tiempo en la expresión anterior en el sistema referente del movimiento elegido,
se tiene1 :
R
Z
Z
d( X r̄dm) ∗
dr̄ G dr̄ G
m
v̄dm = C̄
=
=
dm ⇒ mv̄ =
dt 1
dt
1
X dt 1
X
1
Véase el apéndice para la justificación del paso indicado con *
Luego la cantidad de movimiento de un sistema es la que tendrá toda su masa concentrada en el
centro de masas y animada con la velocidad de este punto.
3.
Momento cinético
Se define el momento cinético de una partícula material M i o el momento cinético elemental
respecto a un punto O1 como el momento de la cantidad de movimiento:
H̄Oi 1 = r̄ i ∧ mi v̄ i
↔
dH̄O1 = r̄ ∧ v̄dm
Es una magnitud vectorial con dimensiones de masa por longitud al cuadrado dividido por tiempo:
[H̄O1 ] = M L2 T−1 .
Se define el momento cinético de un sistema material X respecto a O1 como una magnitud
extensiva de la siguiente forma:
Z
N
X
i
i i
H̄O1 =
r̄ ∧ m v̄
↔ H̄O1 =
r̄ ∧ v̄ dm
X
i=1
Por lo tanto, el momento cinético no es sino el momento en un punto del sistema de vectores
deslizantes cantidad de movimiento, considerado como vector fijo. Se le pueden aplicar, por tanto,
todas las propiedades de un sistema de vectores deslizantes. Por ejemplo, la fórmula del campo de
momentos:
H̄B = H̄A + BA ∧ mv̄ G
El momento en un punto B es igual al momento en otro punto A mas el momento que genera en el
punto B la resultante situada en A.
El cálculo de esta magnitud está ligado a la resolución de la integral correspondiente en una gran
parte de los casos. Sin embargo, se va a enunciar y demostrar un teorema que simplifica el cálculo
de forma notable en ciertas ocasiones.
3.1.
Teorema de König relativo al momento cinético
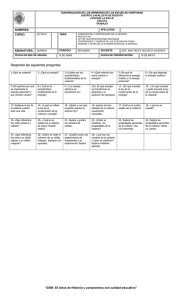
zG
Se denomina sistema ligado al centro de masas (S0 :
z1 X
GxG yG zG ) a un sistema con origen en G (lo que implica
G
G
G
que v̄X0 = 0̄ y que v̄X1 = v̄01 ) y ejes paralelos a los de
M (dm)
S1 : O1 x1 y1 z1 (lo que implica que ω̄01 = 0̄).
0
v̄
G
Al movimiento del sistema material X respecto a S0
r̄
se le denomina movimiento relativo al centro de masas. El
O1 xG
y1
movimiento S0 /S1 es un movimiento de arrastre que en
1
cada instante es una traslación pura y uniforme, por ser
M
G
G
un sólido: v̄01
= v̄01
+
ω̄
01 ∧ GM = v̄01 , ∀M
x1
Se tiene que:
Z
Z
M
M
M
H̄O1 =
O1 M ∧ v̄X1 dm =
(O1 G + GM ) ∧ (v̄X0
+ v̄01
)dm =
|{z}
X
X
G ,∀M
v̄01
Z
M
v̄01
dm
Z
m
= h̄G + O1 G ∧ mv̄
G
M
v̄X0
dm
Z
M
O1 G ∧
+
O1 G ∧
+
GM ∧
+
GM ∧ v̄01
dm =
X
X
X
X
Z
Z
Z
Z
M
G
M
dm) ∧ v̄ G =
= O1 G ∧ v̄
dm
+
O
G
∧
v̄
dm
+
GM
∧
v̄
dm
+(
GM
1
X0
01
X0
01
X
| X{z } | X
{z
} X
=
M
v̄X0
dm
Z
h̄G
yG
H̄G =
Z
GM ∧
M
v̄X1
dm
=
X
Z
GM ∧
X
M
v̄X0
dm
+(
Z
GM
dm) ∧
X
M
v̄01
|{z}
= h̄G
M =v̄ G ,∀M
v̄01
H̄O1 = H̄G + O1 G ∧ mv̄ G
(1)
Se lee “el momento cinético en un punto cualquiera O1 de un sistema X es igual al momento
respecto al centro de masas en el movimiento relativo al mismo más el momento que produce en O1
toda la masa concentrada en el centro de masas y animada con la velocidad de éste".
El uso de este teorema solo trae beneficios si el cálculo de H̄G es más sencillo que el cálculo de
H̄O1 .
4.
Energía cinética
Se define la energía cinética de una partícula material M i o la energía cinética elemental como:
1
1
T i = mi |v̄ i |2 ↔ dT = |v̄|2 dm
2
2
Es una magnitud escalar con dimensiones de masa por longitud al cuadrado dividido por tiempo
al cuadrado: [T̄ ] = M L2 T−2 .
Se define la energía cinética de un sistema material X como una magnitud extensiva de la siguiente
forma:
Z
N
1X i i2
1
m |v̄ |
↔ T =
|v̄|2 dm
T =
2 i=1
2 X
Esta magnitud está relacionada con el virial del sistema de vectores deslizantes.
El cálculo de esta magnitud está ligado a la resolución de la integral correspondiente en una gran
parte de los casos. Sin embargo, se va a enunciar y demostrar un teorema que simplifica el cálculo
de forma notable en ciertas ocasiones.
4.1.
Teorema de König relativo a la energía cinética
Sean X el sistema material, S1 el referente del movimiento y S0 el sistema ligado al centro de
masas de X. Se tiene que:
Z
Z
1
1
M 2
M
M
M
T =
|v̄ | dm =
(v̄ M + v̄01
) · (v̄X0
+ v̄01
) dm =
2 X X1
2 X X0
Z
Z
Z
1
1
M 2
M 2
M
M
=
|v̄ | dm +
|v̄ | dm +
v̄01
· v̄X0
dm =
2 X X0
2 X 01
X
Z
Z
Z
1
1
1
G 2
M
M
M 2
=
|v̄X0 | dm +
|v̄ |
dm + v̄01 ( v̄
dm)
= T̄G + m|v̄ G |2
X0
2
2 | {z }
2
X
X
| X {z
}
v̄M =v̄G ,∀M
TG
1
T = TG + m|v̄ G |2
2
01
(2)
Se lee “la energía cinética de un sistema X es igual a la energía cinética en el movimiento relativo
al centro de masas más la que tendría toda la masa concentrada en el centro de masas y animada
con la velocidad de éste".
El uso de este teorema solo trae beneficios si el cálculo de TG es más sencillo que el cálculo de T .
5.
Atributos cinéticos de un sólido con un punto de velocidad
nula
Sea un solido S2 de cuyo movimiento con respecto a otro S1 se sabe que tiene un punto O1 con
O1
velocidad nula (v̄21
= 0̄).
El campo de velocidades es tal que:
O
M
1
v̄21
=
v̄21
+ ω̄21 ∧ O1 M = ω̄21 ∧ r̄ M
O
G
1
v̄21
=
v̄21
+ ω̄21 ∧ O1 G = ω̄21 ∧ r̄ G
Esta situación puede darse de forma instantánea o permanente. En segundo caso, si el punto O1
dv̄O
O1
= 0̄) se denomina punto fijo.
tiene velocidad nula permanentemente ( dt1 |1 = γ̄21
5.1.
Cantidad de movimiento
G
C̄ = mv̄21
= mω̄21 ∧ r̄ G
C̄ = mω̄21 ∧ r̄ G
5.2.
(3)
Momento cinético
H̄O1 =
Z
r̄
M
M
v̄21
∧
dm =
S1
r̄
M
M
∧ (ω̄21 ∧ r̄ ) dm =
S1
Z
=
Z
S1
Z
S1
¯ − [r̄ M r̄ M ] dm . ω̄ = ¯Ī . ω̄
|r̄ M |2 Ū
21
O1
21
|r̄ M |2 ω̄21 − (r̄ M · ω̄21 )r̄ M dm =
|{z} |
{z
}
¯
M r̄ M ] . ω̄
[r̄
21
U . ω̄21
H̄O1 = ¯ĪO1 . ω̄21
(4)
La fórmula de cálculo anterior es válida solo para un único sólido en el instante considerado o en
cualquier instante en función de si el punto O1 tiene velocidad instantánea nula o es fijo respectivamente.
5.3.
Energía cinética
1
T =
2
Z
M 2
|v̄21
|
S1
1
= ω̄21 .
2
Z
|
1
dm =
2
r̄ M
S1
Z
1
(ω̄21 ∧ r̄ ) ·( ω̄21 ∧ |{z}
r̄ ) dm =
{z } |{z}
2
S1 |
C
B
A
1
∧ (ω̄21 ∧ r̄ M ) dm = ω̄21 . ¯ĪO1 . ω̄21
2
{z
}
M
M
Z
ω̄21 · |{z}
r̄ M ∧ (ω̄21 ∧ r̄ M ) dm =
|{z}
| {z }
S1
B
C
A
H̄O1
1
T = ω̄21 . ¯ĪO1 . ω̄21
2
(5)
La fórmula de cálculo anterior es válida solo para un único sólido en el instante considerado o en
cualquier instante en función de si el punto O1 tiene velocidad instantánea nula o es fijo respectivamente.
6.
Atributos cinéticos de un sólido libre
El movimiento de un solido libre S2 con respecto a un referente S1 se puede considerar como la
composición de dos movimientos: el movimiento relativo al su centro de masas S2 /S0 y el movimiento
de arrastre del sistema ligado al centro de masas S0 /S1 . El movimiento de un sólido relativo a su
G
centro de masas es el movimiento de un sólido con punto fijo, puesto que v̄20
= 0̄ siempre. Además
se tiene que:
ω̄21 = ω̄20 + ω̄
01
O lo que es lo mismo, la velocidad angular del solido respecto al referente y la relativa al sistema
ligado al centro de masas son iguales.
6.1.
Cantidad de movimiento
En estas condiciones, la cantidad de movimiento será:
G
C̄ = mv̄21
6.2.
(6)
Momento cinético
Si aplicamos el teorema de König para deducir la expresión de cálculo del momento cinético
tendremos:
(1)
(4)
G
G
H̄O1 = H̄G + O1 G ∧ mv̄21
= ¯ĪG . ω̄21 + O1 G ∧ mv̄21
G
H̄O1 = ¯ĪG . ω̄21 + O1 G ∧ mv̄21
6.3.
(7)
Energía cinética
Si aplicamos el teorema de König para deducir la expresión de cálculo de la energía cinética:
1
1 G 2
(2)
G 2 (5) 1
T = TG + m|v̄21
| = ω̄21 . ¯ĪG . ω̄21 + |v̄21
|
2
2
2
1
1
G 2
T = ω̄21 . ¯ĪG . ω̄21 + m|v̄21
|
2
2
(8)
Recalcar que estas expresiones son válidas para un único solido libre, de ahí los subíndices numéricos que aparecen en la velocidad del centro de masas. Si nuestro sistema tuviera más de un sólido,
habría que aplicar el hecho de que estas magnitudes son extensivas y sumar las contribuciones de
cada sólido al total.
A.
Teorema del transporte de Reynolds
Sea Ω un volumen de control (conjunto abierto, conexo y acotado de R3 ) y llamemos a su frontera
Σ superficie de control.
Sea H una magnitud física extensiva genérica (tensorial) y sea h su magnitud intensiva específica
asociada (por unidad de masa), que será función de la posición en el espacio donde se considere y del
instante de tiempo en que se considere. Sea ρ la función densidad volumétrica, también dependiente
de la posición y del tiempo. Por lo tanto, ρh será la magnitud intensiva por unidad de volumen.
La relación entre las descripciones intensiva y extensiva de la magnitud la proporciona la siguiente
expresión:
Z
Z
H(t) =
ρ(r̄, t)h(r̄, t)dV =
h(r̄, t)dm
Ω
Ω
Si elegimos como sistema material de análisis la masa encerrada inicialmente por un volumen
de control en un instante, su evolución temporal (geométrica y material) estará determinada por
el movimiento de las partículas que contiene. Este volumen de control que cambia de esa forma se
denomina volumen fluido y le denotaremos por Ωf (t).
El teorema del transporte de Reynolds2 establece que para cualquier función h(r̄, t) suficientemente regular y ∀Ωf (t) volumen fluido se tiene que:
Z
Z
Dh(r̄, t)
d
ρ(r̄, t)h(r̄, t)dV =
ρ(r̄, t)
dV
dt Ωf (t)
Dt
Ωf (t)
donde
Dh(r̄, t)
∂h(r̄, t)
=
+ v̄ · ∇h(r̄, t)
Dt
∂t
y se denomina derivada sustancial o convectiva.
El teorema del transporte de Reynolds relaciona la variación temporal de una propiedad extensiva
con la generación y el flujo de la propiedad intensiva correspondiente (o en términos matemáticos,
la derivada lagrangiana de una integral de volumen de un sistema con una integral en derivadas
eulerianas).
Z
Z
Z
dH
d
Dh(r̄, t)
∂h(r̄, t)
=
dV =
ρ(r̄, t)[
+ v̄ · ∇h(r̄, t)]dV
ρh(r̄, t)dV =
ρ
dt
dt Ωf (t)
Dt
∂t
Ωf (t)
Ωf (t)
Si h(r̄, t) = 1 obtenemos la variación de la masa de un volumen fluido:
Z
Z
dM
d
D1
=
ρ(r̄, t)dV =
ρ(r̄, t) dV = 0
dt
dt Ωf (t)
Dt
Ωf (t)
Obviamente la masa de un volumen fluido se conserva.
Si h(r̄, t) = r̄ obtenemos la variación del momento estático de inercia respecto al origen de un
volumen fluido:
Z
Z
Z
dM̄0
d
Dr̄
∂r̄
=
ρ(r̄, t)r̄dV =
ρ(r̄, t)
dV =
ρ(r̄, t)( + (v̄ · ∇)r̄)dV =
dt
dt Ωf (t)
Dt
∂t
Ωf (t)
Ωf (t)
Z
=
ρ(r̄, t)v̄(r̄, t)dV = C̄(t)
Ωf (t)
Se obtiene la cantidad de movimiento del volumen fluido respecto al referente del movimiento.
2
Para su demostración véase por ejemplo “A Mathematical Introduction to Fluids Mechanics", Chorin & Marsden,
Springer Verlag, 2000