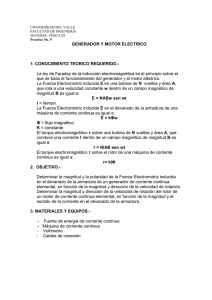
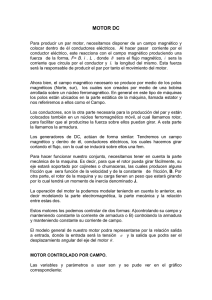
1 CICLO I Práctica 1 Estimación básica de los parámetros del circuito equivalente de la máquina de corriente directa Elaborado por: Harold Salazar Isaza, PhD Geovanny Marulanda García, MSc José David Arias Roche, MSc. Universidad Tecnológica de Pereira Programa de Ingeniería Eléctrica Grupo en donde se debe realizar la práctica: Módulo de LabVolt I. PREINFORME NOTA: Las respuestas a las preguntas de este preinforme se muestran en este documento. La figura y el texto de la pregunta 2 del preinforme es tomado de: [1] S.J. Chapman, Máquinas Eléctricas, 4ta ed, Mcgraw-Hill, 2005. [2] G.J. Thaler y M.L. Wilcox, “Maquinas Eléctricas en Estado Dinámico y Permanente”, Editorial Limusa-Wiley., 1969. 1. Lea las normas de seguridad del laboratorio disponibles en la página web del curso. 2. Explicar el funcionamiento de las principales componentes de la máquina de corriente directa. B. Rotor o Armadura Es la parte móvil, generalmente de configuración cilíndrica que aloja en sus ranuras los devanados del inducido de la máquina (devanado de potencia). Su objetivo es realizar la conversión de energía mecánica-eléctrica. C. Colector o Conmutador Es la estructura que permite la continuidad en el movimiento del rotor. Está constituido de láminas de material conductor (delgas), separadas entre sí y del centro del eje por un material aislante, para evitar cortocircuito con dichos elementos. El colector se encuentra sobre uno de los extremos del eje del rotor, de modo que gira con éste y está en contacto con las escobillas. La función del colector es recoger la tensión producida por el devanado inducido, transmitiéndola al circuito por medio de las escobillas (llamadas también cepillos). D. Escobillas Las escobillas están fabricadas de carbón, y poseen una dureza menor que la del colector para evitar que éste se desgaste rápidamente. Se encuentran albergadas por los portaescobillas. Ambos, escobillas y porta-escobillas, se encuentran en una de las tapas del estator. La función de las escobillas es transmitir la tensión y corriente de la fuente de alimentación hacia el colector y, por consiguiente, al bobinado del rotor. La función del porta-escobillas es mantener a las escobillas en su posición de contacto firme con los segmentos del colector. Esta función la realiza por medio de resortes, los cuales hacen una presión moderada sobre las escobillas contra el colector. Esta presión debe mantenerse en un nivel intermedio ya que, de ser excesiva, la fricción desgastaría tanto a las escobillas como al colector, por otro lado, de ser mínima esta presión, se produciría lo que se denomina "chisporroteo", que es cuando aparecen chispas entre las superficies del colector y las escobillas, debido a que no existe un buen contacto. E. Devanados Consta de bobinas aisladas entre sí y entre el núcleo de la armadura. Estas bobinas están alojadas en las ranuras, y están conectadas eléctricamente con el colector, el cual debido a su movimiento rotatorio, proporciona un camino de conducción conmutado. Figura1. Componentes de la Máquina DC – Fuente: [1] F. Entrehierro Es el espacio que separa el estator y el rotor. Las componentes principales se muestran en la figura 1. A continuación una breve descripción de algunas de esas partes. 3. Describir dos métodos básicos para medir la resistencia e inductancias de la armadura. A. Estator Es la parte externa que permanece inmóvil, generalmente es de hierro con altas calidades magnéticas y de polos salientes, en los cuales se alojan los arrollamientos que producen el campo magnético principal o de excitación. Su objetivo es producir el campo que posibilita la conversión de energía. El método más usado para obtener las resistencias y las inductancias de la máquina de corriente directa no difiere mucho de las técnicas empleadas en otros laboratorios. Para la medida de la resistencia se alimenta con un voltaje DC de baja magnitud y midiendo voltaje y corriente se utiliza directamente la ley de ohm, esto es: 2 CICLO I R V I 1 Por otro lado, para la inductancia igualmente se alimenta con un voltaje de corriente alterna VCA de pequeña magnitud y se utiliza la ley de ohm, esto es: Z 2 R2 V Z L I 2 f 2 4.1. Cálculo del coeficiente de fricción Para calcular el coeficiente de fricción se parte de la ecuación (4). Considere que el motor no tiene carga mecánica acoplada a su eje lo cual necesariamente implica que TL=0. Igualmente, en estado estable (velocidad angular constante), la aceleración del motor es cero por lo cual (4) se reduce a f w =µ IF IA lo cual permite fácilmente determinar la fricción tal como se muestra en (5). Recuerde que para este cálculo se asume conocida la inductancia de velocidad µ. IF I A 4. Describir cómo se mide el coeficiente de fricción y el momento de inercia. f Para comprender como se calculan estos parámetros, considere un motor de excitación independiente como se muestra en la figura 2 en donde se muestran los torques aplicados al rotor del motor. 4.2. Cálculo del momento de inercia Por otro lado, para el momento de inercia se parte de la consideración de que el motor no tiene carga mecánica acoplada a su eje por cual nuevamente TL = 0 y reduciendo (4) a J dw/dt + f w =µ IF IA. Note que el término del lado derecho es cero si una de las dos corrientes es cero, asuma que usted desenergiza la armadura del motor, con lo cual (4) se puede simplificar a J dw/dt + f w = 0. Recuerde que el primer término es el momento de inercia que multiplica la aceleración del rotor. El cálculo de esa aceleración se detalla en la sección II.4 (Medición del coeficiente de fricción y momento de inercia). Bajo el supuesto que ese valor es conocido, el momento de inercia se puede calcular fácilmente a través de la siguiente expresión: Figura 2. Motor de excitación independiente que muestra los torques aplicado a su rotor La segunda ley de Newton aplicada al rotor del motor está dada por (3). T T E TF TL J d dt 3 En donde TE es el torque eléctrico, TF torque de fricción, TL torque de carga o carga mecánica acoplada al eje del motor, J momento de inercia y w corresponde a la velocidad angular. La ecuación anterior se puede reescribir en términos de diferentes variables eléctricas y mecánicas tal como se muestra (4). J d f TL I F I A dt 4 En (4), TL esta dado por TL = f w y TE esta dado por TE=µ IF IA. Recuerde que IF e IA corresponden a las corrientes de campo y armadura respectivamente. Por otro lado, es importante indicar que µ es la inductancia de velocidad y corresponde a la pendiente de la parte lineal de la curva de magnetización de la máquina. La sección II.3 (Medición de la inductancia de velocidad) muestra como calcular este valor. Por lo pronto asuma que usted conoce este valor. 5 J f d dt 6 Observe que el termino dw/dt (la aceleración angular) es un valor negativo si éste es calculado como la desaceleración una vez se desenergice el motor. Igualmente, observe que es necesario conocer el valor de la fricción antes de calcular el momento de inercia. II. PROCEDIMIENTO NOTA: Antes de iniciar el procedimiento, verifique que el módulo de adquisición esté operando de forma correcta, para ello siga la guía “verificación módulo de labvolt” disponible en la página web. 1. Medición de la resistencia de armadura y resistencia del devanado de campo en derivación (shunt). Con el siguiente procedimiento usted tendrá datos suficientes para calcular las resistencias requeridas en el informe. 1.1. Montar el circuito de la Figura 3. El voltaje VDC debe ser de baja magnitud, de tal forma que no se exceda la corriente nominal de la armadura. 1.2. Tomar diferentes medidas de corriente y voltaje para diferentes posiciones del rotor, esto es, mueva el rotor 3 CICLO I ligeramente de forma manual y para cada posición tome medidas de corriente y voltaje. NOTA: El voltaje VDC del punto 1.1 debe permanecer constante. 1.3. Montar el circuito de la Figura 3 sustituyendo la armadura por el devanado shunt (derivación). Alimentar con una fuente DC de voltaje reducido (VDC) y tomar lecturas de corriente y voltaje para varios valores de voltaje de alimentación. Para tomar varias lecturas es necesario que varíe el voltaje de la fuente de alimentación DC. NOTA: Siempre garantice que la corriente no exceda el valor nominal de la corriente del campo. 3. Medición de la inductancia de velocidad. Con el siguiente procedimiento usted tendrá datos suficientes para calcular esta inductancia en el informe. 3.1. Montar el circuito de la Figura 5 (generador DC de excitación independiente) y llevar el generador DC a su velocidad nominal y el reóstato de campo RF a su valor máximo (IF mínima). 3.2. Aumentar IF paso a paso (disminuyendo RF). Para cada valor de la resistencia tome medidas de voltaje en terminales de la máquina DC (V) y de la corriente de campo (A). Garantice que la velocidad nominal de la máquina permanece constante en toda la toma de datos. Note que este procedimiento corresponde a la curva de magnetización de un generador DC con excitación independiente. Figura 3. Circuito para medir los parámetros del numeral 1 Figura 5. Circuito para medir los parámetros del numeral 3 Figura 4. Circuito para medir los parámetros del numeral 2 2. Medición de la inductancia de armadura e inductancia del devanado en derivación. Con el siguiente procedimiento usted tendrá datos suficientes para calcular las inductancias requeridas en el informe. 2.1. Montar el circuito de la Figura 4 y tomar diferentes lecturas de corriente y voltaje. Para esto varíe el voltaje de la fuente de alimentación AC. NOTA: Siempre garantice que la corriente no exceda el valor nominal de la corriente del devanado. 2.2. Montar el circuito de la Figura 4 sustituyendo el devanado en derivación (shunt) por la armadura. Tomar lecturas de corriente y voltaje. Para esto varíe el voltaje de la fuente de alimentación AC. NOTA: Siempre garantice que la corriente no exceda el valor nominal de la corriente de la armadura. Figura 6. Circuito para medir los parámetros del numeral 4 4. Medición del coeficiente de fricción y momento de inercia. Con el siguiente procedimiento usted tendrá datos suficientes para calcular la fricción y el momento de inercia. 4.1. Montar el circuito de la Figura 6 el cual corresponde a un motor de corriente continua en derivación. Ajustar la velocidad nominal de la máquina utilizando el reóstato de campo del motor (RF). Desacople cualquier carga mecánica acoplada al motor. Con el motor operando a velocidad nominal y en vacío (sin carga acoplada), tome lecturas de la corriente de armadura (IA), corriente campo (IF) y la velocidad del motor. 4 CICLO I 4.2. Una vez tome las lecturas del punto anterior, desconecte la armadura y la excitación del motor tomar lecturas de velocidad y tiempo hasta que la maquina se detenga por completo. Este procedimiento es bastante rápido así que es recomendable un buen cronómetro. III. INFORME Además de seguir las guías para la presentación del informe que se encuentra en la página web del curso, incluya los siguientes aspectos en su informe. NOTAS: 1) Recuerde colocar las unidades de las variables en los ejes de las gráficas y 2) no olvide adjuntar los datos tomados durante la práctica en su informe. 1. Calcule la resistencia de armadura y del devanado en derivación con los datos obtenidos en el numeral 1 del procedimiento. Para esto, utilice la ecuación (7). R En dónde 2. 1 n Vi n i 1 I i 7 es el número de mediciones realizadas. Calcule la inductancia de armadura e inductancia del devanado en derivación con los datos obtenidos en el numeral 2 del procedimiento. Para esto, utilice la ecuación (8): Z 2 R2 1 n Vi Z L n i 1 I i 2 f 8 En donde R corresponde a la resistencia del punto anterior y n el número de lecturas tomadas. Calcule la inductancia de velocidad con los datos del numeral 3 y con el siguiente procedimiento: 3.1. Grafique la curva de magnetización con los datos obtenidos en el numeral 3.2, esto es, la curva voltaje en terminales vs. corriente de campo. 3.2. Calcular (inductancia de velocidad del campo shunt) como la pendiente de la curva de magnetización en su parte lineal dividida por la velocidad de rotación de la máquina en radianes por segundo. 3. 4. Calcule el coeficiente de fricción y el momento de inercia con los datos que usted tomo del numeral 4 del procedimiento siguiendo esta secuencia: 4.1. Calcule el coeficiente de fricción con la ecuación (5) y con los datos del numeral del procedimiento 4.1. 4.2. Grafique la curva de velocidad vs. tiempo con los datos del numeral 4.2 del procedimiento. 4.3. Calcule la derivada de esta curva (pendiente) para cada uno de los valores de velocidad que usted tomó en el numeral 4.2 del procedimiento. 4.4. Calcule el momento de inercia con la ecuación (5) utilizando el coeficiente de fricción del numeral 4.1 y cada uno de los valores de velocidad y aceleración del numeral 4.3. 5. Con base en el procedimiento realizado, ¿cómo se puede calcular la resistencia e inductancia del campo serie? 6. Defina con sus propias palabras que es el coeficiente de fricción y el momento de inercia de una maquina eléctrica.
 0
0
Anuncio
Documentos relacionados
Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados