Recurso electrónico / electronic resource
Anuncio

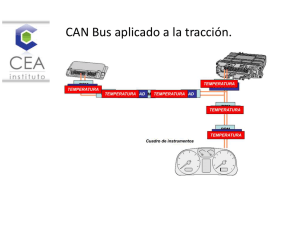
MAQUETA BASE 71:Maquetación 1 23/03/10 11:42 Página 45 E L E C T R O M E C Á N I C A Ordenadores con ruedas Redes informáticas en vehículos Por Juan Rodríguez García LOS SISTEMAS ELECTRÓNICOS HAN ELEVADO ESPECTACULARMENTE LAS PRESTACIONES EN CONFORT, SEGURIDAD ACTIVA Y PASIVA, ENTRETENIMIENTO, MULTIMEDIA Y RENDIMIENTO DEL MOTOR. LA DEMANDA DE LOS USUARIOS, LAS NORMAS ANTICONTAMINANTES Y LA GRAN COMPETENCIA ENTRE LOS CONSTRUCTORES DE AUTOMÓVILES HAN HECHO IMPRESCINDIBLE LAS REDES INFORMÁTICAS “MULTIPLEXADAS”. SON CAPACES DE CONECTAR TODAS LAS UNIDADES ELECTRÓNICAS ENTRE SÍ Y COMPARTIR LA INFORMACIÓN DE LOS DIFERENTES SENSORES, REDUCIENDO LOS REDUNDANTES, LA LONGITUD Y COMPLEJIDAD DE LA INSTALACIÓN ELÉCTRICA Y EL NÚMERO DE CONECTORES. ASÍ, SE AUMENTA LA FIABILIDAD Y SE ENRIQUECEN LAS FUNCIONES El multiplexado es una técnica que permite la transmisión de información digital entre las diferentes unidades de control de un vehículo a través de dos cables –uno solo en algunos casos, en función de la tecnología aplicada–. En la actualidad, existen diferentes tecnologías multiplexadas, que se diferencian en velocidad, naturaleza del protocolo y estructura. Las principales tecnologías son: ■ VAN (Vehicle Area Network). ■ CAN (Controller Area Network). ■ LIN (Local Interconnect Network). ■ MOST (Media Oriented System Transport). ■ FLEXRAY (Red de última generación y alta velocidad). Evolución de la longitud (en metros) de los cables de un vehículo 2500 2000 2000 1500 1400 1500 1000 500 200 0 1970 1980 1990 2000 Nota: Magnitud orientativa, previa al multiplexado (antes del año 2000) y después (con mayor número de equipamiento). CESVIMAP 71 45 MAQUETA BASE 71:Maquetación 1 23/03/10 11:42 Página 46 E L E C T R O M E C Á N I C A EL MULTIPLEXADO PERMITE LA TRANSMISIÓN Algunos fabricantes tienen su propio tipo DE INFORMACIÓN DIGITAL A TRAVÉS DE DOS CABLES (UNO, EN de protocolo multiplexado: ■ ACP (Ford). ■ AVC-LAN (Toyota). ■ Bean (Toyota). ■ CCD (Chrysler). ■ J1850 (Chrysler, GM, Ford). Red de comunicación Es el conjunto de dispositivos electrónicos (unidades de control) equipados con un interfase, con electrónica estandarizada, que permite el intercambio multidireccional de informaciones a través de un BUS. Las informaciones numéricas transitan de un calculador a otro gracias al BUS de comunicación. Puede ser cable de cobre, fibra óptica, señales de radiofrecuencia o infrarrojos. El más utilizado por los constructores de automóviles presenta dos cables de cobre trenzados o blindados para evitar influencias o perturbaciones radioeléctricas que puedan falsear la transmisión de datos. Lo que diferencia a unas redes de otras (VAN, CAN, etc.) es el protocolo de comunicación y su velocidad de transmisión. La información transmitida se denomina trama y está constituida por una señal digital con unos niveles de tensión OCASIONES) w Evolución de la tecnología multiplexada en el Renault Laguna Campo Definición Campo Definición Inicio Señala el inicio del mensaje Control Controla la exactitud de la trama Identificador Indica el destinatario y la importancia de la información (prioridad) ACK Campo de aviso de recibo De comando Demanda de pago. Indica la naturaleza de la trama (si es pregunta, respuesta o difusión de parámetros) Fin Asegura las funciones de sincronización Datos Contiene las informaciones. Campo de datos a transmitir CESVIMAP 71 46 MAQUETA BASE 71:Maquetación 1 23/03/10 11:42 Página 47 E L E C T R O M E C Á N I C A w La gran cantidad de equipamiento de ocio se beneficia de la tecnología multiplexada definidos. Las unidades de control interpretan esos niveles de tensión y los traducen a un código hexadecimal. Pudiéramos decir que la trama es como un servicio de correos: la carta, con su contenido y su sobre, es la trama, y el cartero, con su transporte, puede asemejarse a la red (BUS). Todas las unidades de control instaladas en el vehículo y conectadas al sistema multiplexado pueden emitir y recibir, al mismo tiempo, datos o mensajes. Es en su programación donde se establece el orden de los datos, por importancia y prioridad. Las unidades de control que utilizan el mismo protocolo de comunicación están conectadas a un mismo BUS. Sin embargo, todas las unidades de control del vehículo no utilizan el mismo protocolo de comunicación; ya que los vehículos están constituidos por varios BUSES y, en consecuencia, por varias redes, y son diferentes los protocolos utilizados por cada red. Por ello, dos unidades de control pertenecientes a dos redes distintas sólo pueden comunicarse por medio de un traductor: “unidad de control central”. A esta unidad van conectados todos los BUSES y, a través de ellos, todas las unidades de control del vehículo de todos los sistemas: motor, confort, seguridad, etc. Los datos en un BUS se transmiten mediante una señal digital formada por impulsos. Estos impulsos pueden tomar dos posibles estados lógicos: 0 ó 1, donde 0 es considerado una validación superior y 1 tiene una validación inferior. Cada impulso es 1 bit, unidad mínima de información. Como varias unidades de control pueden transmitir simultáneamente su mensaje de datos (trama) es necesario establecer prioridades. Así, los datos de la unidad de control del ABS son, por seguridad, más importantes que los de la unidad de cierre de puertas y se transmiten primero. No todos los datos o tramas emitidos son utilizados por todas las unidades de control, sino sólo por aquéllas que pueden estar interesadas en esa información. La unidad central procesa las informaciones recibidas y envía exclusivamente mensajes, de forma binaria, a los módulos concernientes. Esta unidad central se hace necesaria por las diferentes velocidades de transmisión y los distintos protocolos de las varias redes que forman un vehículo. También sirve para diagnosticar todas las unidades de control conectadas a ella. RED CAN (Control Area Network) CAN es un protocolo estandarizado de comunicación, desarrollado por Bosch. La red está formada por dos secciones, una de alta velocidad, o CAN H/S, con una CESVIMAP 71 47 EL MULTIPLEXADO EVITA LA INSTALACIÓN REDUNDANTE DE SENSORES, AL COMPARTIR DIFERENTES CENTRALITAS UNA MISMA INFORMACIÓN MAQUETA BASE 71:Maquetación 1 23/03/10 11:42 Página 48 E L E C T R O M E C Á N I C A RED VAN (Vehicle Area Network) VAN es un protocolo estandarizado de comunicación, desarrollado por el grupo PSA. La red está formada por dos secciones. Una se denomina VAN CONFORT, con una velocidad de transmisión de 125 Kbits/s, destinada a unidades de confort (pantalla multifunción, climatización, multimedia/navegación). La configuración de la red es multi-maestro y la longitud de los mensajes es de 28 bytes máximo. La otra se llama VAN CARROCERÍA y alcanza una velocidad de transmisión de 62,5 Kbits/s. Está dividida en dos partes: VAN CARROCERÍA 1 y 2, orientadas a la seguridad: airbag, luces, puertas, elevalunas, etc. La configuración de la red es maestroesclavo, menos sofisticada y costosa, y sí tolera averías en el BUS de comunicación. La unidad de control central, denominada BSI (caja de servicio inteligente) es la encargada de unir ambas redes (VAN CONFORT y VAN CARROCERÍA 1 y 2), debido a la diferencia de velocidad de cada una; también asume la función de diagnosis. Red LIN (Local Interconnect Network) LIN es un protocolo estandarizado de comunicación, creado por Motorola y CESVIMAP 71 48 desarrollado en conjunto por un consorcio LIN, formado por Motorola, fabricantes de vehículos y proveedores de sistemas electrónicos para el automóvil. La red LIN se emplea para la comunicación entre unidades de control de la red CAN y algunos sensores y/o actuadores del sistema gestionado por esas unidades: climatización, luces, cierres centralizados, etc. La configuración de la red es maestromultiesclavo, con una velocidad de transmisión que oscila entre 1 y 20 Kbits/s y la longitud de los mensajes oscila entre 2 y 8 bytes. RED MOST (Media Oriented Systems Transport) MOST es una red de comunicación de fibra óptica de gran velocidad y destinada a las aplicaciones multimedia y de navegación. En el BUS, la trama circula como señales luminosas. Este BUS es unidireccional y en forma de anillo. Cada unidad de control conectada al bus tiene como misión transmitir la trama a la unidad de control siguiente, hasta que efectúa una vuelta completa. Una unidad de control toma en cuenta una trama sólo si ésta le está destinada. La fibra óptica permite crear BUSES de varias decenas de metros de longitud. El protocolo MOST tiene una velocidad de transmisión de hasta 24 Mbits/s y la longitud total de una trama es de 64 bits, de los cuales 60 bits están dedicados a los datos. En caso de avería en el bus, la red queda fuera de servicio ■ PARA SABER MÁS velocidad de transmisión que oscila entre 250 y 500 Kbits por segundo y destinada a unidades de control situadas, generalmente, en el compartimento motor (inyección, ABS, ESP, etc.). La otra, de baja velocidad, o CAN L/S, cuya velocidad de transmisión oscila entre 100 y 125 Kbits/s, destinada a unidades de confort, seguridad pasiva, audio, etc. EL MULTIPLEXADO En la CAN H/S todas las unidades de control pueden emitir tramas por su propia INCREMENTA LA iniciativa (multi-maestros) y su longitud es FIABILIDAD DEL SISTEMA de 8 bytes. Esta red no tolera averías producidas en el bus de comunicación por Y EL NÚMERO DE seguridad. En el caso de la CAN L/S la configuración de FUNCIONES la red es multi-maestro y la longitud de los mensajes es de 8 bytes y sí tolera averías en el bus de comunicación. La unidad de control central es la encargada de unir ambas redes de alta y baja velocidad y la toma de diagnosis para la verificación de las anomalías de los diferentes calculadores, vía la DIAG-on-CAN, con una velocidad de transmisión de 500 Kbits/s. Área de Electromecánica [email protected] Electrónica Auto Volt Revista técnica de electromecánica Robert Bosch España www.robert-bosch-espana.es Cesviteca, biblioteca multimedia de CESVIMAP www.cesvimap.com www.revistacesvimap.com