Movimiento rectilíneo - Escuela Técnica Superior de Ingenieros
Anuncio

Movimiento rectilíneo
Mecánica II
Tema 1
Manuel Ruiz Delgado
Escuela Técnica Superior de Ingenieros Aeronáuticos
Universidad Politécnica de Madrid
Movimiento rectilı́neo– p. 1/41
Mecánica I y II
Mecánica de Partículas y Sólidos Rígidos
Leyes de Newton
Ecs. Generales
de la Dinámica
Geometría de Masas
Fuerzas, Trabajo,
Potencial, Ligaduras
P.T.V.
Casos
Estática
Sólido
Vibraciones
Cinemática
Punto
Percusiones
Magnitudes Cinéticas
Punto
Sólido
Ec. Lagrange
Conceptos auxiliares
M. Orbital
D. Actitud
Núcleo
Movimiento rectilı́neo– p. 2/41
Referencias
Manuel Prieto Alberca, Curso de Mecánica Racional: Dinámica,
ADI, Madrid, 1990.
Antonio Rañada, Dinámica Clásica, Alianza Editorial, Madrid,
1990.
H. Schaub y J. Junkins, Analytical Mechanics of Space Systems,
AIAA, Reston, Virginia, 2003.
L. Meirovitch, Introduction to Dynamics and Control, John Wiley &
Sons, Nueva York, 1985.
L. Meirovitch, Methods of Analytical Dynamics, McGraw-Hill,
Nueva York, 1970.
H. Goldstein, Mecánica Clásica, Reverté, Barcelona, 1988.
E. Desloge, Classical Mechanics, John Wiley & Sons, Nueva York,
1982
Movimiento rectilı́neo– p. 3/41
Movimiento rectilíneo
Modelos - Problema básico
Casos de integración
Caso F (t)
Caso F (ẋ): Sistemas disipativos
Análisis cualitativo
Caso F (x): Sistemas conservativos
Análisis cualitativo
Diagrama de Potencial
Mapa de fases
Oscilador armónico
Libre / Amortiguado
Resonancia
Movimiento rectilı́neo– p. 4/41
Modelos
Partícula, partícula material, masa puntual o, simplemente,
punto: punto geométrico dotado de masa, sobre el que actúan
fuerzas diversas.
La orientación (actitud, Q 10 ) no influye en el movimiento del
centro de masas
Ec. de la cantidad de movimiento
Planetas, sistemas planetarios, etc.
Sólido rígido: conjunto de puntos cuyas distancias permanecen
constantes.
La actitud influye en el movimiento
Ec. CM + Ec. Momento Cinético
Aviones, misiles en vuelo atmosférico
Movimiento rectilı́neo– p. 5/41
Problema básico
Para simplificar, tomamos Ox en la dirección del movimiento rectilíneo:
r = (x, 0, 0)
Fx (x, ẋ, t)
= m ẍ
Fy (x, ẋ, t) + Ny = 0
x = x(t, x0 , ẋ0 )
⇒
Fz (x, ẋ, t) + Nz = 0
Ny = Ny (t, x0 , ẋ0 )
Nz = Nz (t, x0 , ẋ0 )
r(0) = (x0 , 0, 0)
ṙ(0) = (ẋ0 , 0, 0)
z
F
Nz
b
x
y
En general, salvo los casos más simples, la integración de la EDO se tiene que hacer numéricamente.
Ny
Movimiento rectilı́neo– p. 6/41
Casos de integración
En algunos casos
particulares, el problema se puede reducir a
R
cuadraturas ( f (u) du):
F (t)
F (ẋ): fuerzas giroscópicas o disipativas
F (x): fuerzas conservativas
Si las fuerzas son proporcionales a x o ẋ, queda una ecuación lineal
de coeficientes constantes, que se integra completamente: oscilador
armónico
Movimiento rectilı́neo– p. 7/41
Caso F (t)
Cuando la fuerza es una función conocida del tiempo —un motor, por
ejemplo— la ecuación se puede integrar en dos fases:
dẋ
F (t) = m ẍ = m
→
dt
Zt
F (τ )
dτ
ẋ(t) = ẋ0 +
m
t0
→
Z t Z
x(t) = x0 + ẋ0 (t − t0 ) +
t0
τ
t0
F (t)
dt dτ
m
Movimiento rectilı́neo– p. 8/41
Fuerzas dependientes de la velocidad
Giroscópicas: su trabajo es siempre nulo.
⊥ a la velocidad: Coriolis, Lorenz, sustentacióna .
No influyen directamente; sí en el rozamiento, o en ligaduras
unilaterales (despegue)
Disipativas: su trabajo es siempre negativo: disipan o consumen la
energía mecánica del sistema.
Sentido opuesto a la velocidad:
v
v
F(v) = −(a0 + a1 |v| + a2 v + . . . )
= −f (|v|)
|v|
|v|
2
(1)
En casos simples, se puede integrar completamente
a
Sentido usual en Mecánica Clásica. En Ingenierı́a Aeronáutica, en cambio, fuerzas
giroscópicas son las de inercia debidas a piezas rotatorias.
Movimiento rectilı́neo– p. 9/41
Caso F (ẋ): Reducción a cuadraturas
f (v) polinómica, se integra completamente (hasta 3 términos).
En general, se puede reducir a cuadraturas en v :
dv
m ẍ = m
= ±f (v)
dt
m dv
dx = v dt = ±v
f (v)
→
→
Z
v
m dv
t − t0 = ±
v0 f (v)
Z v
m v dv
x − x0 = ±
v0 f (v)
→
t = t(v)
→
x = x(v)
Ecuaciones horarias en forma implícita
El signo ± será el contrario del de v0
Singularidad en v = 0: analizar convergencia y movimiento
posterior.
Movimiento rectilı́neo– p. 10/41
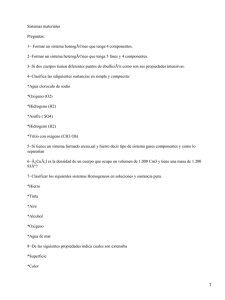
Caso F (ẋ): Análisis cualitativo
f (v)
Se puede analizar el movimiento
vertical de una partícula pesada directamente sobre la ecuación diferencia. Basta que f (v) cumpla:
mg
−f (v)
v
0
vL
f (0) < mg , para que la partícula caiga al soltarla;
∃ vL / f (vL ) = mg , velocidad límite a la que se equilibran peso y
resistencia;
que f (v) sea monótona creciente, al menos en la zona en que
trabajamos.
Movimiento rectilı́neo– p. 11/41
Caso F (ẋ): Análisis cualitativo
O
Se lanza la partícula verticalmente hacia abajo
Ox positivo hacia abajo
Ecuaciones del movimiento:
m v̇ = mg − f (v) = f (vL ) − f (v)
Z v
m dv
t − t0 =
v0 f (vL ) − f (v)
f (v)
mg
v
x
Movimiento rectilı́neo– p. 12/41
Caso F (ẋ): Análisis cualitativo
Hay cuatro casos:
v1
v0
v2
v3
v2
vL
v1
< vL
= vL
> vL
<0
t
0
v3
f (v)
v̇
m v̇ = f (vL ) − f (v)
−f (v)
v̇
mg
v̇
v
v3
0
v1
vL
v2
Movimiento rectilı́neo– p. 13/41
Caso F (ẋ): Caída libre
En el vacío todos los cuerpos caen
con la misma aceleración, g
En el aire, los cuerpos más pesados
caen con más aceleración y mayor
vL :
f (v)
m2 g
m1 g
v
vL1
vL2
Masas distintas m2 > m1
Igual forma y acabado: f (v) igual
vL2 > vL1 , pues m2 g = f (vL2 ) > m1 g = f (vL1 ).
Otro modo de verlo: adimensionalizar f (v) con mg
1
mayor aceleración (a = v )
mayor vL
f (v)
m1 g
vL1
f (v)
m2 g
vL2
Movimiento rectilı́neo– p. 14/41
Caso F (ẋ): Comparación aire/vacío
Comparamos las cuadraturas:
aire: f (v)
Hr =
Tr =
Z
Z
0
−v0
0
−v0
m v dv
mg + f (v)
m dv
mg + f (v)
vacío: 0
<
<
Hv =
Tv =
Z
Z
0
m v dv
−v0
mg + 0
0
m dv
−v0
mg + 0
En las cuadraturas para el vacío, el denominador es menor, el integrando
mayor, y por tanto las integrales son mayores. En vacío se llega más alto
y se tarda más tiempoa :
a
|Hr | < |Hv |
Tr < Tv
Con el sentido positivo hacia abajo, las alturas serı́an negativas
Movimiento rectilı́neo– p. 15/41
Caso F (x): fuerzas conservativas
R
F = F (x) i deriva de un potencial V (x) = − F (x) dx
dV (x)
F = −∇V (x) = −
i
dx
La ecuación del movimiento se puede integrar una vez, para dar la
integral de la energía:
m ẍ = F (x) ;
⇒
m ẍ ẋ = F (x) ẋ ⇒
Z
2
m ẋ
= F (x) dx + E
2 }
| {z
| {z }
T
⇒
T +V =E
−V
Se conserva la energía mecánica: Sistema conservativo
Movimiento rectilı́neo– p. 16/41
Caso F (x): Reducción a cuadraturas
Integral primera: conservación de la energía
m ẋ2
2
= E − V (x)
Cuadratura:
r
dx
2
[E − V (x)]
=±
dt
m
⇒
⇒
ẋ = ±
r
t − t0 =
2
(E − V (x))
m
Z
x
x0
q
2
m
±dx
[E − V (x)]
Se obtienen ẋ = ẋ(x, x0 , ẋ0 ) y t − t0 = t(x, x0 , ẋ0 ) , ecuaciones
horarias en forma implícita.
El signo ± se determina con las condiciones iniciales
Movimiento rectilı́neo– p. 17/41
Caso F (x): análisis cualitativo
V (x)
La integral de la energía T (ẋ) + V (x) = E
permite realizar un análisis cualitativo del
movimiento, sin necesidad de integrarlo
completamente.
Dos métodos equivalentes:
Diagrama de energía potencial: representar
V (x); cada valor de E es una recta
horizontal
Mapa de fases: Cada valor de E es una
curva del plano [x, ẋ].
O
x
ẋ
x
Movimiento rectilı́neo– p. 18/41
Caso F (x): análisis cualitativo
1
2
m
ẋ
2
+ V (x) = E
ẋ = ±
q
2
m
[E − V (x)]
ẋ
V (x)
x
O
x
Movimiento rectilı́neo– p. 19/41
Caso F (x): análisis cualitativo
1
2
m
ẋ
2
+ V (x) = E
ẋ = ±
q
2
m
[E − V (x)]
ẋ
V (x)
ẋ
T
x
x
V
O
x
x
Movimiento rectilı́neo– p. 19/41
Caso F (x): análisis cualitativo
Diagrama de energía potencial
V (x)
c
E4
E3
a
d
∞
E2
b
E1
x1 x2
x3
x4
x
Movimiento rectilı́neo– p. 20/41
Caso F (x): análisis cualitativo
V (x)
a) Punto de parada y retroceso
E
Singularidad en el corte:
Z x
q
t − t0 =
m ẋ2
2
x0
2
m
±dx
[E − V (x)]
Convergencia de la integral:
p
E − V (x)
lı́m
=K/α<1
α
x→x4 (x4 − x)
x
x4
ẋ
ẋ
x
Corte: α = 1/2 ⇒ llega en t finito
Movimiento rectilı́neo– p. 21/41
Caso F (x): análisis cualitativo
Fx = −V ′ (x)
V (x)
b) Mínimo en x3
E < V (x3 ) ⇒ ∄ movimiento (ẋ ∈ ℑ)
E = V (x3 ) ⇒ Sólo equilibrio en x3
E > V (x3 ) ⇒ Oscilaciones entre dos
puntos de parada/retroceso
V (x) mínimo en x3 ⇒ punto de equilibrio
estable. Al perturbarlo (E ↑) →
oscilaciones acotadas, tan pequeñas como
se quiera: pozo de potencial.
Diagrama de fases: curvas cerradas alrededor de (x3 , 0): centro, o punto elíptico.
Eosc
Eequ
x2
x3
x4
ẋ
x
Movimiento rectilı́neo– p. 22/41
Caso F (x): análisis cualitativo
c: Máximo en x1
E > V (x1 ), T > 0, pasa sin pararse
E = V (x1 ) según condiciones iniciales:
Equilibrio inestable en x1 : perturbación
→ movimiento no acotado
Movimiento asintótico: si V (x) es
analítica, α = 1, t = ∞
E < V (x1 ) No llega
Mapa de fases: punto de silla o hiperbólico. Separatrices: movimiento asintótico
con E = V (x1 ).
V (x)
x1
ẋ
x
Movimiento rectilı́neo– p. 23/41
Caso F (x): análisis cualitativo
d: Rama infinita - Similar al máximo, con x → ∞
ẋ
0
V (x)
x
x
ẋ
0
V (x)
x
x
Movimiento rectilı́neo– p. 24/41
Oscilador armónico amortiguado forzado
Partícula de masa m unida al origen por un muelle de constante k y
longitud natural nula, y un amortiguador viscoso de constante c. Sobre la
partícula actúa una fuerza F = F sin ω t i.
m ẍ = −k x − c ẋ + F sin ω t
c
F
F
2
ẍ + 2ζωn ẋ + ωn x = m sin ω t
m
x
k
Frecuencia de forzamiento: ω
p
Frecuencia natural: ωn = k/m
x = xh + xp
c
Factor de amortiguación: ζ = 2mω
n
Solución homogénea
xh
Respuesta Transitoria
Solución particular
xp
Respuesta Estacionaria
Movimiento rectilı́neo– p. 25/41
Transitoria: oscilador libre
r2 + 2ζωn r + ωn2 = 0
⇒
Amortiguamiento supercrítico,
q
ri = ωn −ζ ± ζ 2 − 1
ζ >1
Dos raíces reales negativas:
xh = A er1 t + B er2 t ; con r1 , r2 < 0
√
Am. Crítico, ζ = 1
(ccr = 2 km)
Una raíz doble real negativa
xh = (A + B t) e−ωn t
La que muere más rápido.
Frontera movimiento oscilatorio / no
oscilatorio.
Movimiento rectilı́neo– p. 26/41
Transitoria: oscilador libre
Amortiguamiento subcrítico, ζ < 1
2 raíces complejas conjugadas
Movimiento oscilatorio no periódico,
exponencialmente amortiguado
p
ωn 1 − ζ 2 : pseudofrecuencia
xh = e−ζωn t
= e−ζωn t
√ 2
√ 2 A eiωn 1−ζ t + B e−iωn 1−ζ t =
h
p
p
i
C cos ωn 1 − ζ 2 t + D sin ωn 1 − ζ 2 t =
i
h
p
= e−ζωn t E cos ωn 1 − ζ 2 t + ψ
Movimiento rectilı́neo– p. 27/41
Transitoria: oscilador libre amortiguado
ζ
V (x)
0
0,2
1
2
ζ=0
0,2
2
ẋ
x
1
x
ζ = 0 punto de equilibrio estable
ζ > 0 eq. asintóticamente estable
ζ
ζ
ζ
ζ
=0
>1
=1
<1
centro
nodo estable
nodo de una tangente est.
foco estable
Movimiento rectilı́neo– p. 28/41
Transitoria: Decremento logarítmico
En el caso subcrítico, se puede determinar experimentalmente el factor
de amortiguamiento midiendo dos amplitudes separadas un
pseudoperiodo. Pueden medirse en cualquier punto, aunque es más fácil
medir dos máximos sucesivos.
x
Sea ∆t = √2π 2 el pseudoperiodo:
ωn
1−ζ
e−ζωn t E
x1 =
cos (. . . )
x2 = e−ζωn (t+∆t) E cos (· · · + 2π)
√2πζ
x
1
eδ =
= e 1−ζ2 ⇒
x2
t
δ
ζ=√
4π 2 + δ 2
El logaritmo del cociente de amplitudes, δ , se llama decremento
logarítmico.
Movimiento rectilı́neo– p. 29/41
Respuesta estacionaria: oscilador forzado
ẍ + 2ζωn ẋ + ωn2 x =
EDO:
F
m
sin ω t
Ensayamos soluciones de la forma,
xp = C1 sin ω t + C2 cos ω t = A sin (ω t − φ)
C1 = A cos φ;
C2 = −A sin φ
Se sustituye en la EDO:
2
2
−C1 ω − 2 ζ ωn C2 ω + ωn C1 sin ω t +
2
2
+ −C2 ω + 2 ζ ωn C1 ω + ωn C2 cos ω t = F/m sin ω t
Igualando términos:
Movimiento rectilı́neo– p. 30/41
Respuesta estacionaria: oscilador forzado
0
}|
{
z
−C1 ω 2 − 2 ζ ωn C2 ω + ωn 2 C1 − F/m sin ω t +
+ −C2 ω 2 + 2 ζ ωn C1 ω + ωn2 C2 cos ω t = 0
{z
}
|
0
2
−C2 ω + 2 ζ ωn C1 ω
+ ωn2 C2
=0 →
2 ζ ω ωn
C2 = 2
C1
2
ω − ωn
|
{z
}
↓
2
2
F ωn − ω /m
i
C1 = h
2 ω 2 ω 2 + (ω 2 − ω 2 )2
4ζ
F
n
n
2
2
−C1 ω − 2 ζ ωn C2 ω + ωn C1 =
→
−F 2ζωωn /m
m
i
C2 = h
2
4ζ 2 ω 2 ω 2 + (ω 2 − ω 2 )
n
n
Movimiento rectilı́neo– p. 31/41
Respuesta estacionaria: oscilador forzado
Es más útil expresar la solución mediante la fase φ y la amplitud A:
xp = A sin (ω t − φ)
A=
q
C12
+ C22
F/m
= r
2
ωn2 4ζ 2 ωωn2 + 1 −
=r
2
ω2
2 ω2
4ζ
ωn2
ωn2
F/k
+ 1−
2
2
ω
ωn2
2ζ ωωn
C2
=
tan φ = −
ω2
C1
1 − ωn2
Desplazamiento estático
F/k
Factor de amplificación
(magnification factor)
µ=
r
1
2
ω2
ω2
2
4ζ ω2 + 1− ω2
n
n
Movimiento rectilı́neo– p. 32/41
Respuesta estacionaria: oscilador forzado
Con lo que la solución completa es:
Homogénea: Transitoria
z
}|
{
A er1 t + B er2 t (ri < 0)
−ωn t
(A
+
B
t)
e
x(t) =
p
+
A e−ζωn t cos ωn 1 − ζ 2 t + ψ
ω
F/k
2ζ
ωn
+ r
sin ω t − tan−1
ω2
2
1 − ωn2
2
2
ω
ω
4ζ 2 ωn2 + 1 − ωn2
{z
}
|
Particular: Estacionaria
Movimiento rectilı́neo– p. 33/41
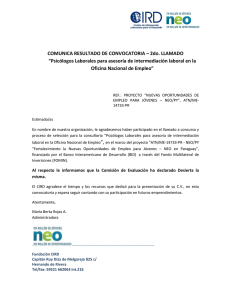
Factor de amplificación de la estacionaria
4
ζ=0
d)
µ
0,15
3
0,2
2
0,3
a)
0,4
0,5
0,75
1
1,5
∞ 25 12 6
1
b)
3
0
0
c)
1
ζ=∞
2
ω/ωn
3
Movimiento rectilı́neo– p. 34/41
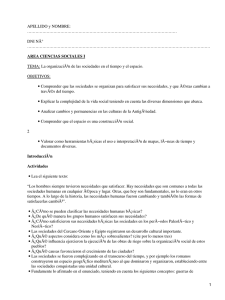
Fase de la estacionaria
b)
π
ζ=0
0,1
0,2
φ
0,3
0,5
0,75
1
d)
π
2
1,5
3
6
ζ=∞
c)
a)
0
1
2
ω/ωn 3
Movimiento rectilı́neo– p. 35/41
Respuesta estacionaria: oscilador forzado
Fase en el movimiento armónico
Posición
x=
A sin(ω t)
ϕ
Velocidad
ẋ =
Aω cos(ω t) = Aω sin(ω t + π/2)
ϕ+
Aceleración ẍ = −Aω 2 sin(ω t) = Aω 2 sin(ω t + π)
π
2
ϕ+π
Movimiento rectilı́neo– p. 36/41
Respuesta estacionaria: oscilador forzado
4
a) Muelle dominante: ω ≪ ωn
p
ωn = k/m >> 1, o k >> m.
0 + 0 + k x ≃ F sin(ω t)
φ→0
x ∝ F (t)
ζ=0
µ
3
2
1
a)
0
0
Respuesta del muelle muy
π
rápida frente a la excitación
φ
≃ sucesión de estados de
π
equilibrio
Desplazamiento en fase con la 2
excitación: fase nula.
a)
Acelerómetros: x ∝ F
0
1
2
ω/ωn
3
ζ=0
ζ=∞
1
2
ω/ωn3
Movimiento rectilı́neo– p. 37/41
Respuesta estacionaria: oscilador forzado
4
ζ=0
µ
b) Inercia dominante: ω ≫ ωn
p
ωn = k/m << 1, o m >> k
m ẍ + 0 + 0 ≃ F sin(ω t)
φ→π
ẍ ∝ F (t)
3
2
1
b)
0
0
π
Respuesta del muelle muy lenta
φ
frente a la excitación
π
Aceleración ≃ forzamiento:
fase π .
2
Sismógrafos: ẍ ∝ F
0
1
2
ζ=0
b)
ω/ωn
3
ζ=∞
1
2
ω/ωn3
Movimiento rectilı́neo– p. 38/41
Respuesta estacionaria: oscilador forzado
4
ζ=0
µ
3
c) Disipación dominante: ζ ≫ 1
El término dominante es el de la ve- 2
locidad
1
0 + c ẋ + 0 ≃ F sin(ω t)
φ → π/2
ẋ ∝ F (t)
0
0
π
1
c)
ω/ωn
3
ζ=0
φ
Sólo hay movimiento cuando
hay excitación
π
Velocidad ≃ forzamiento: fase 2
π/2.
0
2
c)
1
2
ζ=∞
ω/ωn3
Movimiento rectilı́neo– p. 39/41
Respuesta estacionaria: oscilador forzado
4
ζ=0
d)
µ
3
d) Resonancia: ω ≃ ωn
ζ = 0 ; ω = ωn ; A → ∞
ζ > 0 ; ω ≃ ωn ; A ↑↑
Excitación en fase con la
velocidad
Trabajo externo positivo
φ→0
µ↑
2
1
0
0
π
1
2
ω/ωn
3
ζ=0
φ
π
2
0
d)
ζ=∞
1
2
ω/ωn3
Movimiento rectilı́neo– p. 40/41
Resonancia
Para ζ = 0, en la resonancia, la amplitud se hace ∞: absurdo.
Con ζ = 0 y ω = ωn , la solución no es válida
ω 6= ωn
ω = ωn
F/k
x = A cos (ωn t + ψ) +
sin ω t
2
2
1 − ω /ωn
F t
x = A cos (ωn t + ψ) −
cos ωn t
2ωn m
F en fase con el movimiento: W > 0, E ↑
Si no hay ζ que disipe esa energía, x → ∞
Movimiento rectilı́neo– p. 41/41