Agentes Inteligentes
Anuncio

Agentes
¿De dónde vienen los Agentes?
Tecnología de Objetos (software)
Inteligencia Artificial
Sistemas Distribuidos
(computación)
Sociedades, Psicología
Sistemas Intencionales &
dificultades ‘top-down’
1
Tecnología de Objetos
Mensajes entre objetos
Encapsulamiento, independencia
Clases, herencia
Inteligencia Artificial
Conocimiento (representación del mundo)
Razonamiento
Aprendizaje
Enfoque de agente:
Sensores
Proceso inteligente
Efectores
2
Sistemas Distribuidos
Distribución de datos y procesos
Conectividad, Redes, Protocolos
Interoperabilidad
Internet
Sociedades, Psicología
Historias de hormigas y abejas
Interacciones entre humanos, roles
Conductismo, Gestalt, Cognitivismo
3
Sistemas Intencionales &
dificultades ‘top-down’
Sistemas Complejos
fácilmente diseñables como
Sistemas Intencionales
Diseño de grandes
aplicaciones informáticas
mediante métodos top down
es caro y difícil de mantener
y actualizar
Autonomía
9 Componentes Informáticos se entienden y diseñan como entidades autónomas
independientes unas de otras.
9 El diálogo entre entidades materializa la ejecución de un sistema, no las
llamadas a procedimientos o funciones, o la ejecución de un método como
consecuencia la recepción de un mensaje
9 Los agentes deciden de forma autónoma de que manera actuar y en que
momento intervenir en la solución colectiva a un problema
Pero ¿qué es un agente?
Proceso de larga vida (permanente)
Independencia, autonomía
“Inteligencia”
4
Teoría de Agentes
Un agente es un sistema informático,
situado en algún entorno, que percibe el
entorno (entradas sensibles de su entorno)
y a partir de tales percepciones determina
(mediante técnicas de resolución de
problemas) y ejecuta acciones (de forma
autónoma y flexible) que le permiten
alcanzar sus objetivos y que pueden
cambiar el entorno.
Agente: Definición
No existe una definición comunmente aceptada.
Entorno
Wooldridge:
Wooldridge:
• Cualquier proceso computacional
dirigido por el objetivo capaz de
interaccionar con su entorno de
forma flexible y robusta
Flexibilidad:
Reactivo
Proactivo
Social
5
Agente: Definición
No existe una definición comunmente
aceptada.
Wooldridge:
Cualquier proceso computacional dirigido por el objetivo capaz
de interaccionar con su entorno de forma flexible y robusta
Flexible: Reactivo, Proactivo y Social
Parunak:
Teoría de Agentes
Autonomía: capacidad de actuar sin intervención humana directa o de otros
agentes.
Sociabilidad: capacidad de interaccionar con otros agentes, utilizando como
medio algún lenguaje de comunicación entre agentes.
Reactividad: un agente está inmerso en un determinado entorno (habitat), del
que percibe estímulos y ante los que debe reaccionar en un tiempo
preestablecido.
Iniciativa: un agente no sólo debe reaccionar a los cambios que se produzcan
en su entorno, sino que tiene que tener un carácter emprendedor y tomar la
iniciativa para actuar guiado por los objetivos que debe de satisfacer.
Movilidad: habilidad de trasladarse en una red de comunicación informática.
Veracidad: no comunica información falsa intencionadamente.
Benevolencia: no tiene objetivos contradictorios y siempre intenta realizar la
tarea que se le solicita.
Racionalidad: tiene unos objetivos específ. y siempre intenta llevarlos a cabo.
6
Teoría de Agentes
Los sistemas compuestos de múltiples agentes, comenzaron a utilizarse
en la Inteligencia Artificial Distribuida (O'hare et al.., 1996), que
tradicionalmente se ha dividido en dos campos:
La Resolución de Problemas distribuidos: un problema particular
puede resolverse por un número de nodos que cooperan en dividir y
compartir conocimiento sobre el problema y su solución. Las tareas que
cada agente realiza están prefijadas de antemano, cada agente tiene una
conducta fija, y el sistema se centra en el comportamiento global.
Los Sistemas Multiagente: agentes autónomos trabajan juntos para
resolver problemas, caracterizado porque cada agente tiene una
información o capacidad incompleta para solucionar el problema, no hay un
sistema global de control, los datos están descentralizados y la computación
es asíncrona. Los agentes pueden decidir dinámicamente que tareas deben
realizar y quien realiza cada tarea.
Teoría de Agentes
Sistema Basado en Agentes
Utiliza como mecanismo de abstracción los
agentes, pero aún siendo modelizado en
términos de agentes, podría ser
implementado sin ninguna estructura
software correspondiente a éstos.
Sistemas Multi-agente
Es diseñado e implementado como varios
agentes interactuando entre sí, para así
lograr la funcionalidad deseada.
7
Alguna puntualización
sobre la racionalidad
El carácter de racionalidad de un agente (Russell, et al. 1995)
depende de cuatro factores:
9
De la medida con la que se evalúe el grado de éxito logrado.
9
De la secuencia de percepciones, entendiendo por tal todo
aquello que hasta ese momento haya percibido el agente.
9
Del conocimiento que el agente posea del medio.
9
De las acciones que el agente pueda llevar a cabo.
Un agente racional debe emprender todas aquellas acciones que
favorezcan obtener el máximo de su medida de rendimiento,
basándose en las evidencias aportadas por la secuencia de
percepciones y en todo el conocimiento incorporado.
Teoría de Agentes
¿Cómo formular, describir, descomponer problemas y sintetizar
resultados entre un grupo de agentes inteligentes?
¿Cómo permitir a los agentes comunicarse e interactuar?
¿Qué lenguajes de comunicación y protocolos se pueden usar?
¿Qué arquitectura es la mas adecuada para construir Sistemas
multi-agente prácticos?
¿Qué lenguajes y herramientas de desarrollo se pueden utilizar?
¿Cómo construir herramientas para soportar las metodologías
de desarrollo?, etc.
8
Multi-Agente
Interacción de varios agentes similares
o heterogéneos
Sin control global
Datos descentralizados
Alcance y punto de vista individuales y
limitados
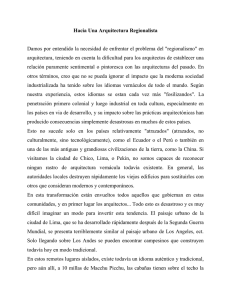
Agente vs. Objeto (I)
Agente como sucesor del paradigma de objetos
(Jennings)
Objeto: No tiene control sobre su estado interno.
Objeto1.m1()
m1
m2
mi : métodos
Objeto2
Estado
m3
Objeto1
9
Agente vs. Objeto (II)
Parunak [PAAM’99]:
Un agente es:
Un
Un
Un
Un
objeto
objeto
objeto
objeto
con iniciativa.
con actitud u orientación.
que puede decir “No” (o “Adelante”).
pro-activo.
Wooldridge [Weiss 1999]
“Los objetos lo hacen gratis, los agentes lo hacen por dinero”
(objects do it for free, agents do it for money).
Arquitecturas de Agente (I)
Metodologías particulares para construir agentes.
1ª clasificación:
Acceso a los sensores y actuadores de las capas de control:
Ventaja: Paralelismo
Inconv.:
Inconv.: Alto conocim.
conocim. de
Control para coordinar
10
Arquitecturas de Agente (I)
Metodologías particulares para construir agentes.
1ª clasificación:
Acceso a los sensores y actuadores de las capas de control:
Ventaja: Menor conocim.
conocim. de Control
Inconv.:
Inconv.: Mayor complejidad en la
capa que interactúa con los sensores
Arquitecturas de Agente (II)
2ª Clasificación: Tipo de procesamiento
Arqitecturas Basadas en la Lógica
Arquitecturas Deliberativas
Arquitecturas Reactivas
Arquitecturas Híbridas
11
Arq. basada en lógica
9
9
Representación de el estado interno según un
conjunto de sentencias lógicas de primero orden
Reglas de deducción lógica para tomar decisiones
Ventajas:
•
Representación clara y elegante
Desventajas:
•
•
Complejidad temporal elevada
Difícil encontrar una representación simbólica para
entidades y procesos del mundo real
Arq. basada en lógica
Sea
L, un conjunto de sentencias lógica de primero orden.
D, un conjunto de bases de datos de L. (D=P (L)).
d, elementos de D.
A, las posibles acciones de que el agente es capaz.
a, elementos de A.
Entonces las funciones que forman un agente son:
Ver : S
P
Próximo : D x P
D
Acción : D
A
12
Arq. basada en lógica
Función Acción (d : D) : A
1.
2.
3.
4.
5.
6.
7.
comienzo
para cada a que pertenece a A hacer
si d |--p Hacer(a) entonces devolver a
para cada a que pertenece a A hacer
si d |--p no Hacer(a) entonces devolver a
devolver nulo
fin
Arq. basada en lógica
Ciclo de funcionamiento:
Ver(s)
Ver(s), genera una percepción
Próximo(ik , Ver(s))
Ver(s)), actualiza el estado interior del
agente
Acción(Próximo(ik , Ver(s)))
Ver(s))), acción de actuar
agente
estado
accion
próximo
ver
entorno
13
Arquitecturas de Agente (III):
Arquitecturas Deliberativas (I)
Hipótesis de Símbolos Físicos [Newell y Simmons]
+ Planificador IA
Estado inicial, operadores/planes, objetivo
Arquitectura horizontal
IRMA [Bratman 1987], GRATE* [Jennings 1993]
Arquitecturas de Agente (III):
Arquitecturas Deliberativas (II)
Tipos:
– Agentes Intencionales
• Capaces de razonar sobre
sus creencias e intenciones
• Planificadores que incluyen
creencias e intenciones en
sus planes
• Teoría de Agentes BDI: IRMA, PRS
– Agentes Sociales
14
Arquitecturas de Agente (III):
Arquitecturas Deliberativas (II)
Tipos:
– Agentes Intencionales
– Agentes Sociales
Dos grandes grupos:
• Agentes intencionales +
modelo explí
explícito de otros
agentes
COSY, GRATE*, DADA-Soc
• Aspectos cooperativos (cuá
(cuándo, có
cómo y con quié
quién cooperar),
sin modelar necesariamente las intenciones de los agentes
Archon,
Archon, Imagine, Coopera y MAST
Arquitecturas de Agente (III):
Arquitecturas Deliberativas(III)
Son aquellas arquitectura que utilizan modelos de
representación simbólica del conocimiento. Suelen estar
basadas en la teoría clásica de planificación, donde existe un
estado inicial de partida, un conjunto de planes y un estado
objetivo a satisfacer. En estos sistemas parece aceptada la
idea de que un agente contenga algún sistema de
planificación que sea el encargado de determinar que paso
debe de llevar a cabo para conseguir su objetivo.
Por tanto un agente deliberativo (o con una arquitectura
deliberativa) es aquel que contiene un modelo simbólico del
mundo, explícitamente representado, en donde las
decisiones
se
toman
utilizando
mecanismos
de
razonamiento lógico basados en la concordancia de
patrones y la manipulación simbólica.
15
Arquitecturas de Agente (III):
Arquitecturas Deliberativas(IV)
Arquitectura B.D.I. :
Creencias – B (Believes)
Conocimiento del agente sobre el entorno
Deseos – D (Desires)
Metas del agente
Intenciones – I (Intentions)
¾
¾
¾
Manejan y conducen a acciones dirigidas hacia las
metas
Persisten
Influyen las creencias
Arquitecturas de Agente (III):
Arquitecturas Deliberativas(IV)
Arquitectura B.D.I. :
9
Agentes audaces:
-
9
No se paran para reconsiderar las intenciones
Coste temporal y computacional bajo
Adaptos para entornos que no cambian rápidamente
Agentes cautos:
-
-
Constantemente se paran para reconsiderar las
intenciones
Explotan nuevas posibilidades
Adaptos para entornos que cambian rápidamente
16
Arquitecturas de Agente (III):
Arquitecturas Deliberativas(IV)
Arquitectura B.D.I. :
Sean
Bel, Des, Int, los conjuntos de las posibles
creencias, deseos y intenciones
El estado interno del agente una triple (B,D,I)
Entonces las funciones:
• Brf : P(Bel) x P
P(Bel)
• Opciones : P(Bel) x P(Int)
P(Des)
• Filtro : P(Bel) x P(Des) x P(Int)
P(Int)
• Ejecutar : P(Int)
A
Arquitecturas de Agente (III):
Arquitecturas Deliberativas(IV)
Arquitectura B.D.I. :
Brf
sensores
entrada
creencias
Función Acción (p : P) : A
comienzo
B := Brf (B,p)
D := Opciones (B, D)
I := Filtro (B,D,I)
devolver Ejecutar (I)
fin
Opciones
deseos
Filtro
intenciones
Acción
acciónes
salida
17
Arquitecturas de Agente (III):
Arquitecturas Deliberativas(IV)
Arquitectura B.D.I. :
Ventajas
Modelo Intuitivo
Inconvenientes
Difícil equilibrar una conducta del agente que tenga
al mismo tiempo iniciativa y reactividad
Arquitecturas de Agente (IV):
Arquitecturas Reactivas (I)
No incluye un modelo del mundo simbólico
No usa razonamiento simbólico complejo.
Modelo Estímulo – Respuesta
Procesamiento Ascendente (bottom-up):
Patrones que se activan bajo ciertas condiciones de los sensores
y tienen un efecto directo en los actuadores
Arquitecturas verticales
Estí
Estímulos externos procesados por capas especializadas que
responden con acciones y pueden inhibir las capas inferiores
18
Arquitecturas de Agente (IV):
Arquitecturas Reactivas (II)
Principales Arquitecturas Reactivas:
Reglas Situadas
Arquitecturas de Subsunción y autómatas
de estado finito
Tareas Competitivas
Redes Neuronales
Arquitecturas de Agente (IV):
Arquitecturas Reactivas (II)
Principales Arquitecturas Reactivas:
Reglas Situadas
Arquitecturas de Subsunción y autómatas
de estado finito
Capa: red de topologí
topología fija de má
máquinas de estado finitas
Tareas Competitivas
Redes Neuronales
19
Arquitecturas de Agente (IV):
Arquitecturas Reactivas (II)
Principales Arquitecturas Reactivas:
Reglas Situadas
Arquitecturas de Subsunción y autómatas
de estado finito
Las capas mantienen una relació
relación de inhibició
inhibición sobre las
capas inferiores (inhibir entradas de los sensores y
acciones en los actuadores)
actuadores)
Tareas Competitivas
Redes Neuronales
Arquitecturas de Agente (IV):
Arquitecturas Reactivas (II)
Principales Arquitecturas Reactivas:
Reglas Situadas
Arquitecturas de Subsunción y autómatas
de estado finito
El control no es central, sino dirigido por los datos en
cada capa
Tareas Competitivas
Redes Neuronales
20
Arquitecturas de Agente (IV):
Arquitecturas Reactivas (II)
Principales Arquitecturas Reactivas:
Reglas Situadas
Arquitecturas de Subsunción y autómatas
de estado finito
Tareas Competitivas
Tarea a realizar de entre varias posibles: la que
proporciona un nivel de activació
activación mayor
Redes Neuronales
Arquitecturas de Agente (IV):
Arquitecturas Reactivas (II)
Principales Arquitecturas Reactivas:
Reglas Situadas
Arquitecturas de Subsunción y autómatas
de estado finito
Tareas Competitivas
Aproximació
Aproximación ecoló
ecológica del problema de resolució
resolución
distribuida de problemas
Redes Neuronales
21
Arquitecturas de Agente (IV):
Arquitecturas Reactivas (II)
Principales Arquitecturas Reactivas:
Reglas Situadas
Arquitecturas de Subsunción y autómatas
de estado finito
Tareas Competitivas
El problema se resuelve sin comunicació
comunicación entre los
individuos, estableciendo un criterio de terminació
terminación del
problema
Redes Neuronales
Arquitecturas de Agente (IV):
Arquitecturas Reactivas (III)
Las arquitecturas reactivas, se caracterizan por no tener como
elemento central de razonamiento un modelo simbólico y por no utilizar
razonamiento simbólico complejo (Brooks, 1991).
Un ejemplo típico de estas arquitecturas es la propuesta de Roodney
Brooks, conocida como arquitectura de subsunción (Brooks, 1991).
Esta arquitectura se basa en el hecho de que el comportamiento
inteligente puede ser generado sin utilizar propuestas del modelo
simbólico y en el hecho de que la inteligencia es una propiedad
emergente de ciertos sistemas complejos.
Las arquitecturas de subsunción manejan jerarquías de tareas que
definen un comportamiento. Suelen estar organizados en jerarquías de
capas, de menor a mayor nivel de abstracción.
22
Arquitecturas de Agente (IV):
Arquitecturas Reactivas (III)
Arquitectura de subsunción
9
9
9
La toma de decisiones de un agente esta
realizada en base a un conjunto de tareas
Muchas conductas pueden dispararse
simultáneamente
Conductas arregladas según una jerarquía
Arquitecturas de Agente (IV):
Arquitecturas Reactivas (III)
Ventajas:
Respuesta inmediata del agente
No problema de la representación simbólica
Inconvenientes:
Difícil diseñar agentes puramente reactivos que
puedan aprender de la experiencia
Interacciones difíciles de entender en agentes
con muchas conductas
23
Arquitecturas de Agente (IV):
Arquitecturas Reactivas (IV)
Sea
c, un conjunto de percepciónes.
a, una posible acción.
(c,a), una conducta.
R, un conjunto de conductas
<r , relación binaria de inhibición en R x R
Arquitecturas de Agente (IV):
Arquitecturas Reactivas (IV)
Función Acción (p : P) : A
1.
2.
3.
4.
5.
6.
7.
8.
var conductas: P(R)
comienzo
conductas :={(c,a) | (c,a) ∈ R y p ∈ c}
para cada (c,a) ∈ conductas hacer
si ¬(∃(c1,a1)∈conductas | (c1,a1)<r (c,a))
entonces
devolver a
devolver nulo
fin
24
Arquitecturas de Agente (V):
Arquitecturas Híbridas (I)
Agente formado por dos o más subsist.:
Deliberativo:
Deliberativo:
• Modelo del mundo simbó
simbólico
• Determinar acciones a realizar para satisfacer los
objetivos locales y cooperativos de los agentes
– Reactivo:
Reactivo:
• Procesar los estí
estímulos
que no necesitan
deliberació
deliberación.
Arquitecturas de Agente (V):
Arquitecturas Híbridas (II)
Para la construcción de agentes no es del todo acertado utilizar
una arquitectura totalmente deliberativa, o totalmente reactiva, se
han propuesto sistemas híbridos que pretenden combinar aspectos
de ambos modelos.
Agente compuesto de dos subsistemas:
uno deliberativo, que utilice un modelo simbólico y que genere planes
en el sentido expuesto anteriormente, y
otro reactivo centrado en reaccionar a los eventos que tengan lugar en
el entorno y que no requiera un mecanismo de razonamiento
complejo.
Estructuración por capas:
verticalmente, sólo una capa tiene acceso a los sensores y actuadores.
horizontalmente, todas las capas tienen acceso a los sensores y a los
actuadores.
25
Arquitecturas de Agente (V):
Arquitecturas Híbridas (II)
Capas organizadas jerárquicam. con información sobre el entorno
Diferentes niveles de abstracción:
Reactivo:
Reactivo
Conocimiento:
Conocimiento
Nivel intermedio
Se centra en el conocimiento que posee del medio
Normalmente utiliza una representación simbólica del medio.
Social:
Social
Nivel bajo
Se toman decisiones en base a los datos recopilados por el agente.
Nivel más alto
Maneja aspectos sociales del entorno, incluyendo tanto información de otros
agentes, como deseos, intenciones,etc.
Comportamiento global del agente definido por la interacción entre
estos niveles.
Arquitecturas de Agente (V):
Arquitecturas Híbridas (III)
Arquitectura en Capas:
Clase de arquitecturas divididas en
subsistemas organizados en una jerarquía de
capas que interaccionan
Sistema Típico en dos capas:
Capa para la conducta reactiva
Capa para la iniciativa
Tipos de Estructuras:
Capas Horizontales
Capas Verticales
26
Arquitecturas de Agente (V):
Arquitecturas Híbridas (III)
Arquitectura en Capas:
Capas Horizontales:
Horizontales
Cada capa esta directamente conectada con los
sensores y los actuadores
Contribuye con sugerencias a la acción de actuar
Función mediadora:
Decide qué capa tiene el control del agente,
Asegura la consistencia,
Capa 1
Cuello de Botella
Capa 2
percepción
-
acción
Capa n
Arquitecturas de Agente (V):
Arquitecturas Híbridas (III)
Arquitectura en Capas:
Capas Verticales:
Verticales
Los sensores y los actuadores están conectados
con una capa
No tolerante a fallos
Una pasada
Dos pasadas
percepción
percepción
acción
acción
27
Arquitecturas de Agente (V):
Arquitecturas Híbridas (III)
Arquitectura en Capas:
Ventajas:
Ventajas
Optima para equilibrar las diferentes conductas del
agente (reactividad, iniciativa)
Inconvenientes:
Inconvenientes
Falta de claridad
Numero elevado de toda las posibles
combinaciones de interacción entre las diferentes
capas
Arquitecturas de Agente (V):
Arquitecturas Híbridas (III)
Arquitectura en Capas
Ejemplo: TOURINGMACHINES
Tres capas horizontales mas un modulo de control
Aspecto Social
Entrada
Sensorial
Salida
Acc
Acción
Capa de Modelado
Subsistema
de
Percepción
Capa de Planning
Subsistema
de
Acción
Capa Reactiva
Control
Framework
Aspecto ProPro-activo
Aspecto Reactivo
28
Arquitecturas de Agente (V):
Arquitecturas Híbridas (IV)
Arquitectura en Capas
Ejemplo: TOURINGMACHINES
Capa reactiva: respuestas mas o menos inmediatas a los
¾
cambios del entorno, implementada con reglas situaciónacción
Capa de planificación: representa la iniciativa del agente,
contiene librería de planes “esqueletos” de emparejar con las
metas
¾
¾
Capa de modelización: representa las entidades del entorno
¾
Sistema de control: decide qué capa tiene el control sobre el
agente para evitar conflictos, implementado con reglas de
control que pueden suprimir las entradas y inhibir las salidas
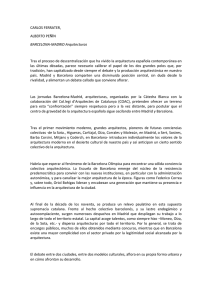
Arquitecturas de Agente (V):
Arquitecturas Híbridas (IV)
Arquitectura en Capas
Ejemplo: INTERRAP
Tres capas verticales, cada capa tiene su base de
conocimiento, dos pasadas
Capa de
cooperación
Conocimiento
social
Capa de
plan
Conocimiento de
planificación
Capa de
conducta
Modelo del
entorno
percepción
entrada
Interface
acción
salida
29
Arquitecturas de Agente (V):
Arquitecturas Híbridas (IV)
Arquitectura en Capas
Ejemplo: INTERRAP
Conocimiento social: representa los planes y las
acciones de otros agentes en el entorno
Conocimiento de planificación: representa los
planes y las acciones de el agente mismo
Modelo del entorno: informaciones sobre el
entorno
Interacción entre las capas:
Activación desde abajo hacia arriba
Ejecución desde arriba hacia abajo
Comunicación entre agentes
Se presupone comunicación física y de
protocolos básicos (p.ej. TCP/IP)
Sintaxis: Estándar KQML
Actos de habla (tell, ask deny, perform, …)
Implementaciones (JAT, LALO, …)
Semántica: KIF, Ontologías
Clases estándares, reutilizar
Ontolingua
30
Lenguajes de agentes
AGENT0
Un agente esta especificado según:
o Capacidades: lo que puede hacer el agente
o Creencias iniciales: conocimiento de el agente
o Encargos iniciales: tienen un rol semejante a las
intenciones de la Arq. B.D.I.
Cada regla de encargo tiene:
• Condición de mensaje
• Condición mental
• acción
Lenguajes de agentes
AGENT0(2)
Las acciones pueden ser
• Privadas: ejecución de subrutinas interiores
• Comunicativas: se ocupan de enviar mensajes
Los mensajes posibles son
• Petición y no petición: para pedir y retener acciones
• Información: para difundir informaciones
Ejemplo:
COMMIT(
(agent, REQUEST, DO(time, action)),
(B,[now, Friend agent] AND CAN(self,action) AND NOT [time, CMT(self,anyaction)]),
self, DO(time,action))
31
Lenguajes de agentes
METATEM Concurrente
9
9
9
9
Basado en la ejecución directa de formulas lógicas
Contiene un numero de agentes en ejecución
concurrente que se pasan mensajes de manera
asincrona
Cada agente tiene una especificación lógica temporal
de su conducta de exhibir
En base a formulas lógicas temporales pasadas
determina formulas lógicas temporales futuras
Lenguajes de agentes
METATEM Concurrente(2)
¾
Ejemplo de control de recursos
1.
2.
3.
4.
rc(ask)[give]:
ask(x)
give(x)
(¬ask(x) OR (give(x) AND ¬ask(x))
give(x) AND give(y)
(x=y)
¬give(x)
32
Cuestiones básicas para agentes
Comunicación
Cooperación
Inteligencia
Coordinación de agentes
Roles, autoridad, jerarquía
Expectativas, creencias
Mercados, Contract Net
Manejo de conflictos, negociación,
argumentación.
33
Inteligencia
¿qué inteligencia?
Deducción automática
Planes de acción
Teoría de juegos
Modelación de otros
Aprendizaje
Aplicaciones de agentes
Comercio electrónico
Monitorización de vehículos, tráfico
aéreo
Fabricación inteligente
Agentes mediadores de información
Redes de cooperación
Ing. De software
34
Conclusión
Problemas grandes, distribuidos
Ambientes abiertos y dinámicos
Software flexible, interoperable,
eficiente, mantenible, confiable,
robusto, ...
Hay un agente en su futuro...
Bibliografía
[Iglesias 1998] Iglesias Fernández, C. A.: Definición de
una Metodología para el Desarrollo de Sistemas
Multiagente. Tesis Doctoral. Departamento de Sistemas
Telemáticos. Universidad Politécnica de Madrid. Enero
1998.
[Wooldridge 1995b] Wooldridge, M. and Jennings, N. R.
Intelligent agents: Theory and practice. The Knowledge
Engineering Review, 10(2):115–152, 1995.
35