clase18
Anuncio

Reconocimiento de Patrones: Segmentación de Imágenes
Trataremos un conjunto de tópicos del área del reconocimiento de patrones. En
particular consideraremos reconocimiento de patrones estadístico, instrumentados
con
técnicas de procesado digital de imágenes. Esto involucra primero localizar y aislar objetos en
una imagen, posteriormente identificando (clasificando) estos objetos usando técnicas de
teoría de decisiones estadística.
Reconocimiento estadístico de patrones.
La rama de visión por computadora, dentro de inteligencia artificial, desarrolla
algoritmos para el analizar el contenido de una imagen. Una gran variedad de aproximaciones
en la dirección del la interpretación de imágenes (image understanding) ha sido empleada, una
de ellas es el reconocimiento estadístico de patrones.
El reconocimiento estadístico de patrones supone que la imagen puede contener uno o
mas objetos y cada objeto corresponde a uno de los diferentes tipos (categorías, clases)
determinados de patrones.
Dada una imagen digitalizada que contiene varios objetos, el reconocimiento de
patrones consiste de tres etapas:
Segmentación de la imagen (aislamiento de los objetos)
Extracción de características
Clasificación.
En la segmentación, se identifican los diferentes objetos y se aíslan del resto de la
imagen.
Durante la extracción de características, los objetos son “medidos”. Por medida vamos
a entender la cuantificación de alguna propiedad del objeto. Una característica es una función
de una o más medidas, calculadas, tales que representan alguna característica importante del
objeto. El proceso de la extracción de características produce un conjunto de propiedades que
juntas producen un vector. Este proceso reduce drasticamente la cantidad de información
La clasificación es una toma de decisión la cual considera las clases a las cuales
pertenece el objeto. Cada objeto se reconoce como perteneciente a algún tipo en particular, y
el reconocimiento se lleva a cabo como un proceso de clasificación. Cada objeto se asigna
como perteneciente a uno o varios grupos predeterminados. Estos grupos o clases son todos
los tipos de objetos que se espera existan dentro de la imagen.
Ejemplo de Reconocimiento de patrones.
Los conceptos básicos del reconocimiento estadístico de patrones, pueden ser
ilustrados con el siguiente ejemplo. Supongamos que se quiere construir un sistema
clasificador de frutas, las frutas son cerezas, manzanas, limones y toronjas. Entonces
necesitamos un sistema procesador de imágenes que observe las frutas que se van
aproximando y clasificar a cada una, para enviarla a la caja adecuada.
Se puede instalar un sistema de digitalización, sobre la banda e instrumentar la
decisión de la clasificación en una computadora.
Para este ejemplo vamos a medir dos cantidades en cada pieza de fruta: Su diámetro y
su color. El programa de la computadora procesara cada imagen y medirá las dos cantidades,
el diámetro en milímetros, así como los parámetros indicativos del color.
Supongamos que tenemos una cámara de color, entonces el programa calcula la
brillantez en cada uno de los tres canales rojo (R), verde (G) y azul (B).
Una de las características que se pueden medir es la razón (cociente) entre los canales
rojo y verde. Esta tomara bajos valores para el amarillo y valores altos para las frutas rojas.. A
esta razón le podemos llamar la medida de cantidad de rojo (redness).
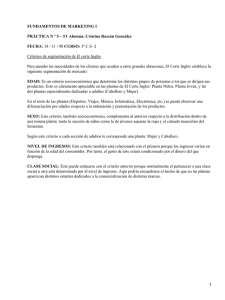
La siguiente figura muestra un espacio bidimensional con las dos características que
nos interesa medir, así como los “amontonamientos” (clusters) producidos por cada una de
las clases. Colocando líneas de decisión apropiadamente sobre el espacio de características,
podemos partir una región para cada clase, y de esta manera establecer la regla de
clasificación.
Cuando un objeto se acerca a la cámara de TV, este es medido y sus características
especifican un punto en el espacio, el cual es asignado a una de las cuatro clases. Tan pronto
como la decisión de la clasificación es terminada, el sistema mecánico enviará la fruta al
compartimento adecuado.
El carácter estadístico de este proceso quedara claro mas adelante, por el momento es
importante mencionar que cada fruta produce una Función de Distribución de Probabilidad
(FDP) en el espacio de características. Las líneas de decisión pueden ser determinadas a
partir de la interacción de las FDP´s de manera tal que el error en la clasificación sea el
mínimo.
Diseño del Sistema de Reconocimiento de Patrones.
El diseño del sistema se lleva a cabo en 5 pasos mostrados en la tabla de abajo.
Paso
Función
Diseño del localizador de objetos
Selecciona el algoritmo para la segmentación
de la escena, la cual aislará los objetos
individuales del resto de la imagen.
Selección de las características
Decide cuales propiedades de los objetos
distinguen
de
una
mejor
manera,
los
diferentes tipos de objetos, y como medir esas
características
Diseño del clasificador
Establece las bases matemáticas del algoritmo
de clasificación y selecciona la estructura del
clasificador que va a ser usado
Entrenamiento del clasificador
Fija los diferentes parámetros (fronteras de
decisión) en el clasificador que se adecuen a
los objetos que están siendo clasificados.
Evaluación del sistema
Calcula los diferentes posibles errores de
clasificación, así como sus porcentajes.
Proceso de segmentación de la imagen
Definimos la segmentación de una imagen como la partición de la imagen digital en
regiones disjuntas (que no se traslapan). Una región es un conjunto de pixeles conectados.
Hay dos formas de definir la conectividad: conectividad cuatro y conectividad 8. La
conectividad cuatro considera solo a los pixeles adyacentes (derecha, izquierda, arriba, abajo).
La conectividad 8 considera a los pixeles sobre la diagonal.
La segmentación de imágenes se puede llevar a cabo de tres maneras: por regiones,
por fronteras y por orillas
Proceso de Segmentación de la Imagen.
Segmentación por umbral
Umbral global
Umbral adaptivo
Selección optica del umbral
Métodos de segmentación basados en el gradiente
Laplaciano
Detección de orillas y continuidad
Operador de sobel
Operador de Roberts
Operador Prewitt
Operador de Kirsch
Transformada de Hough.
Crecimiento de regiones
Morfología (imágenes binarias)
Erosión
Dilatación
Abertura
Cerradura
Transformada de Hough
La transformada de Hough es útil para determinar todos los puntos pertenecientes a
una recta, así como la ecuación de esta.
x cos( ) y sen( )
Morfologia (imágenes binarias)
Erosión:
Se define como
E = BS = {x,ySxy B}
Esto se lee como: La imagen binaria E que resulta de erosionar B con el elemento estructural
S, es el conjunto de puntos (x,y) tales que si S se traslada y su origen se encuentra (x,y), este
está completamente contenido en B.
Dilatación:
D = BS = {x,ySxy B }
La imagen binaria D, resulta de dilatar B con el elemento estructural S, es el conjunto
de puntos (x,y) tales que si S se traslada, y su origen está en (x,y), entonces su intersección
con B es diferente del vacio.
Basados en estas dos operaciones morfológicas básicas, se pueden construir una
combinación de ellas.
Abertura: Elimina objetos pequeños y delgados, generalmente suaviza los bordes.
Rompe la continuidad de las líneas delgadas.
BS = (BS)S
Cerradura. Llena pequeñas regiones, y agujeros conecta objetos cercanos.
BS = (BS)S
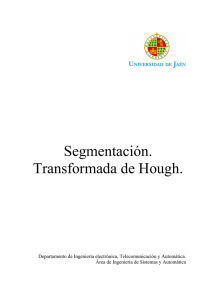
Adelgazamiento:
Adelgazamiento y esqueletonización. (a) esqueleto adelgazado (b) eje central medio.