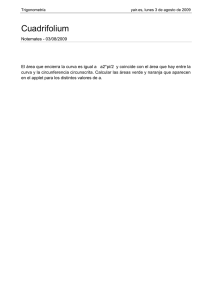
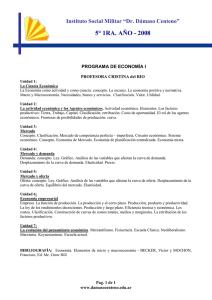
CONTROL DIGITAL Código: 203041A_761 Fase 1 Identificar El Escenario Y Analizar La Estabilidad Presentado a: Johan Sebastián Bustos Tutor Entregado por: Anfred Angelis Cuenca Leiva Código: 12200527 Grupo: 203041_20 UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA MARZO 2020 CEAD NEIVA INTRODUCCIÓN En los controles digitales la transformada de Laplace se reemplaza con la transformada Z donde una señal de tiempo discreta en la forma de una secuencia de números complejos o reales es convertida en una representación de dominio de frecuencia compleja. En el presente trabajo identificaremos el comportamiento de funciones de transferencia de sistemas discretos y verifica la estabilidad por medio de métodos de análisis empleando herramientas computacionales. Actividades A Desarrollar: Fase 1: Identificación del escenario y análisis de estabilidad. A continuación, se describen los puntos a desarrollar, correspondientes a la Fase 1: Usando como base la temática de la unidad I del curso, replicando la información de la guía de recursos educativos, la cual encontrará en el entorno de aprendizaje práctico y con el uso de Matlab y Proteus dar solución a los siguientes puntos del proyecto: 1. Investigar sobre la identificación de modelos a partir de la curva de reacción de un proceso y realizar un pequeño resumen sobre los modelos generales. (Máximo 4 páginas en este punto). Identificación De Modelos De Orden Reducido A Partir De La Curva De Reacción Del Proceso Modelos A Identificar: Primer Orden Segundo Orden (Polo Doble) Segundo Orden (Sobreamortiguado) Métodos De Identificación Generales Todos los procedimientos de identificación presentados, emplean la información del proceso obtenida a partir de una prueba de lazo abierto. Se considerará como entrada, una señal escalón u(t) de amplitud ∆u y como respuesta del sistema una señal y(t) tal como se muestra en la Figura 1. • Modelos De Primer Orden Más Tiempo Muerto La respuesta del modelo (1) a un cambio escalón u ∆ en la entrada, está dada por • Modelo de Segundo Orden de Polo Doble La respuesta del modelo (2) a un cambio escalón u ∆ en la entrada, está dada por la ecuación • Modelo De Segundo Orden Sobre Amortiguado La respuesta del modelo (3) a un cambio escalón unitario en la entrada, está dada por la ecuación Método 123c El primer método de identificación de un modelo de primer orden más tiempo muerto, que utiliza dos puntos sobre la curva de reacción, fue propuesto por Smith [7]. Este seleccionó los tiempos para la identificación como los necesarios para alcanzar el 28,4 y el 63,2 por ciento del cambio total en la respuesta a una entrada escalón. Normalmente la respuesta del modelo identificado con estos puntos muestra las mayores diferencias con respecto a la respuesta del proceso real, al inicio y entre el 70 y 80% de la respuesta. Para disminuir este error, Alfaro [1] separó los dos puntos y los seleccionó arbitrariamente como los correspondientes al 25 y el 75 por ciento de la respuesta, por lo que el método se denominó originalmente “1/4 – 3/4”. Modelo De Primer Orden Más Tiempo Muerto Utilizando x1 = 0,25 y x2 = 0,75 en (8) y (12) se obtiene que a1= 0,9102 y b1 = 1,2620, pudiéndose calcular entonces los parámetros del modelo (1) con las ecuaciones donde t25 y t75 son los tiempos requeridos para que la respuesta del sistema alcance el 25 y el 75 por ciento de su valor final. Modelo de Polo Doble más Tiempo Muerto Los tiempos requeridos para alcanzar el 25 y el 75 por ciento de la respuesta, en el caso del modelo de polo doble, son Modelo De Segundo Orden Sobre Amortiguado Procedimiento simplificado La extensión del método “1/4 –3/4” para identificar un modelo de segundo orden sobre amortiguado, parte del modelo de polo doble obtenido en el punto anterior. Los parámetros del modelo se identifican con donde a está dada por Método “simétrico” En el desarrollo general de los métodos de identificación presentados en III., se supuso que los dos o tres puntos requeridos sobre la curva de respuesta, podían ser cualquiera. A continuación, se presenta una simplificación del método general, que a diferencia del método 123c descrito en IV., en el cual estos puntos están fijos, estos se pueden seleccionar arbitrariamente pero ubicados simétricamente sobre la curva de respuesta. Uno de los dos puntos se denotará como x siendo entonces el otro x −1 . Esto hace que los tiempos que se deben determinar serán ahora x t t =1 y ' 2 1 x x t t t = = − , con 0 0,5 < < x . Cuando se requiera un tercer punto este corresponderá al tiempo para alcanzar el 50 por ciento del valor final de la respuesta, t50. • Modelo De Primer Orden Más Tiempo Muerto En este caso las ecuaciones (12) se reducen a • Modelo De Polo Doble Más Tiempo Muerto En este caso las ecuaciones presentadas en III. se reducen a • Modelo De Segundo Orden Sobre Amortiguado Procedimiento simplificado En este caso se emplean las relaciones obtenidas en el punto III. Entonces a partir del modelo de polo doble obtenido en el punto anterior, el nuevo modelo se obtiene con Método De Los “Tiempos Óptimos” Las ecuaciones generales derivadas en III. para cada uno de los modelos, se pueden utilizar para obtener sus parámetros óptimos. La optimización deberá determinar el par de puntos (x1, x2) sobre la curva de reacción, que producen los parámetros del modelo que minimice la sumatoria de error de predicción cuadrático (45). Los tiempos correspondientes a estos puntos, serán los tiempos óptimos. Si θ es el vector de parámetros del modelo, entonces (45) se puede expresar como 2. Realizar el montaje en el software Proteus de la figura 1, analizar la curva de reacción del Heated Oven (LumpedModel) el cual se debe configurar con los siguientes parámetros: • Temperature Ambient (°C)= 27 • Thermal Resistence to Ambient (°C/W)= 0.5 • Oven Time Constant (sec)= 10 • Heater Time Constant (sec)= 1 • Temperature coefficient (V/°C)= 1 • Heating Power (W)= 150 Circuito Curva de Reacción A partir de la curva de reacción calcular lo siguiente: • Establecer el modelo analítico (ecuación matemática) según la gráfica del simulador Proteus. 𝑡0 = 𝑡1 − 𝑡0 = 4 − 3 = 1 𝑌0 = 𝑡2 − 𝑡1 = 20 − 4 = 16 𝑘0 = 𝑦1 − 𝑦0 840 − 27 = = 81.3 𝑢1 − 𝑢0 10 − 0 𝐺 (𝑠 ) = • 𝑘0 𝑒 −𝑠𝑡0 𝑒 −𝑠 = 81.3 1 + 𝑌0 𝑠 16𝑠 Simular el modelo analítico (ecuación matemática) en Matlab y aplicar una entrada tipo escalón. • Hacer el análisis de estabilidad de manera analítico y computacional y comparar resultados. Observamos que son curvas muy similares donde aproximadamente alcanzan la misma temperatura en el mismo lapso del tiempo. Realizo la comprobación en Matlab en la función de Simulink Se observa que la curva de la gráfica es muy similar a la del modelo en Proteus, donde la temperatura normal es la misma pero varia la temperatura máxima. CONCLUSIONES • Identifique los conceptos y aplicaciones sobre los modelos a partir de la curva de reacción de un proceso y realizar un pequeño resumen sobre los modelos generales. • identifique el comportamiento de funciones de transferencia de sistemas discretos y verifica la estabilidad por medio de métodos de análisis empleando herramientas computacionales. • Desarrolle habilidades para el uso de la herramienta Proteus y Matlab para el desarrollo de circuitos y gráficas. Referencias Bustos, J. S. (s.f.). Curva de Reacción de un Calefactor. Objeto_virtual_de_Informacion_OVI. Recuperado de https://repository.unad.edu.co/handle/10596/22987 Bustos, J. S. (s.f.). Taller Modelamiento Curva de Reacción. webconferencia. Recuperado de http://bit.ly/397Vubh Bustos, J. S. (s.f.). Webconferencia Fase 1. Webconferencia Fase 1. Recuperado de http://bit.ly/3bKfrGB Mathworks, M. . (s.f.). Matlab. 1994-2020 The MathWorks, Inc.