PRÁCTICAS DE P.D.S 4º CURSO DE INGENIERÍA ELECTRÓNICA Profesor: Gustavo Camps Valls
Anuncio

PRÁCTICAS DE P.D.S
4º CURSO DE INGENIERÍA ELECTRÓNICA
Profesor: Gustavo Camps Valls
PRÁCTICA 2: TRANSFORMADA Z.
Resumen. En esta práctica se estudiarán diferentes aplicaciones de la Transformada Z
en el campo del procesado digital de señal. Estos ejemplos tienen por objetivo resaltar
que no esta transformada no es sólo una representación matemática sino que tiene una
práctica importante.
•
Determinación de la estabilidad de un sistema. Una forma de comprobar la
estabilidad de un sistema es fijarse en los polos de la transformada Z de la respuesta
impulsional de dicho sistema. Según la posición de los polos la respuesta
impulsional está (o no) acotada y presenta diferentes comportamientos. Con la
instrucción filter vamos a determinar la respuesta impulsional de sistemas con los
siguientes polos:
1. Polos reales simples (prueba valores positivos y negativos mayores y
menores que 1).
2. Polos complejos simples que deberán aparecer por pares conjugados (prueba
valores del módulo mayores y menores que 1). ¿Qué controla la fase del polo
complejo?, ¿y el módulo?.
3. Repite los apartados 1 y 2 pero ahora los polos ya no son simples.
•
Determinación de ecuación en diferencias. Uno de los usos dados a esta
transformada es determinar la expresión en diferencias de un sistema que cumple
unas determinadas condiciones; una de las aplicaciones más directas es la
implementación de generadores de señal mediante ecuaciones en diferencias. En
este primer apartado se pide diseñar dos sistemas que presenten las siguientes
respuestas impulsionales.
h ( n ) = {− 1,0,1,−1,0,1.........}
h ( n ) = cos( Ω ⋅ n )
Comprueba el resultado usando MATLAB, implementando la ecuación en
diferencias proporcionada por la transformada Z tomando como entrada el impulso
unitario.
Sobre la determinación de la ecuación en diferencias se plantea otra utilidad; existen
situaciones donde se puede determinar de forma intuitiva el diagrama de bloques del
sistema digital pero no es inmediato el paso del diagrama de bloques a la ecuación
en diferencias.
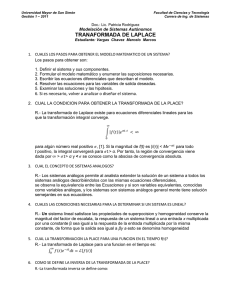
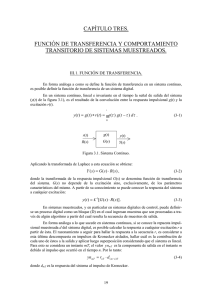
A modo de ejemplo se presenta este diagrama de bloques representando un recinto
en el que existen reflexiones, realimentaciones parciales y totales de la señal original
x(n); no es tan raro, variando los parámetros adecuadamente se puede conseguir
reproducir un estadio, una catedral.......
x(n)
+
+
y(n)
+
−1
−1
−1
z
z
-0.6
z
-0.5
Determina la ecuación en diferencias que liga la entrada x(n) con y(n); ¿es estable
este sistema?, ¿qué ocurre si algún coeficiente de realimentación es mayor que 1?
Determina su respuesta impulsional.
•
Simplificación de estructuras. Esta es otra de las aplicaciones “clásicas” de la
transformada Z; implementar un sistema con el menor número de retardos. Para
comprobar esta cualidad se implementarán los siguientes sistemas de forma directa
y usando el menor número de retardos. Compara los resultados y comprueba su
equivalencia.
y( n ) = x ( n ) − 2 x (n − 1) − 0.81 ⋅ y (n − 2)
y( n ) = x ( n − 2) − 0.7 ⋅ y( n − 1) − 0.8 ⋅ y( n − 2)
•
Relación con la Transformada de Laplace. Esta relación nos permitirá que,
conocidas las características de un determinado sistema continuo mediante la
transformada de Laplace extrapolarlas al mundo digital mediante esta
transformación. La aplicación donde más se utiliza esta transformación es en el
diseño de filtros digitales. A modo de ejemplo se presenta el siguiente diseño. Un
filtro de Butterworth de primer orden tiene la siguiente expresión:
T( p) =
wc
p + wc
El siguiente programa implementa la transformación impulso invariante
correspondiente a esta función. Para observar como funciona toma al principio las
frecuencias (de corte y de muestreo) de tal forma que se cumpla fc<<<fm. Fíjate en
lo que ocurre conforme se aumenta la frecuencia de corete con respecto a la de
muestreo.
fc=input('Frecuencia de corte (en Hz) ');
fm=input('Frecuencia de muestreo ');
a=2*pi*fc;
b=[1 a];
w=0:(4*pi*fc);
hc=freqs(a,b,w);
plot(w/(2*pi),abs(hc));
grid
zoom
%%% PARTE DISCRETA %%%%%
figure
fn=fc/fm;
G=(a/(1-exp(-2*pi*fn)))^(-1);
den=[1 -exp(-2*pi*fn)];
wd=0:pi/500:pi;
hd=freqz(a,den,wd);
plot((fm*wd)/(2*pi),G*abs(hd));
grid
zoom
Para aquellos que quieran seguir trabajando un filtro de Butterworth de segundo
orden con frecuencia de corte wc tiene la siguiente expresión:
T( p) =
w 2c
p 2 + 2 ⋅ w c + w 2c
A la hora de aplicar la transformación impulso invariante hay que descomponer la
expresión de T(p) en fracciones simples de la forma:
T( p) =
w c2
A
B
=
+
j ⋅θ
− j ⋅θ
j⋅θ
p − r ⋅e ⋅ p − r ⋅ e
p−r⋅e
p − r ⋅ e − j⋅ θ
(
)(
) (
) (
)
Así pues el primer paso es determinar la constantes que aparecen en la última
expresión. Una vez determinados sólo resta aplicar la transformación impulso
invariante.