Tema 4. Integrales
Anuncio

Integrales
4.1
Tema 4. Integrales
Si f(x) es una función conocida, el cálculo diferencial estudia la manera de determinar otra función f '(x) que
llamamos función derivada de f(x). En el tema anterior estudiamos las reglas de derivación, así como algunas de sus
aplicaciones.
En este tema estudiaremos el problema contrario, es decir, dada una función conocida, f(x), encontrar otra,
denominada primitiva de la anterior, F(x), tal que la derivada de esta última coincida con la primera. Éste es el objeto del
cálculo integral.
4.1. Primitiva de una función. Integral indefinida. Propiedades.
Como indicamos anteriormente la primitiva de una función f(x) es otra función F(x) tal que F'(x) = f(x),
sabemos que la derivada de una constante es cero, luego si a F(x) se le suma una constante obtenemos una nueva
función que también es primitiva de f(x), es decir, una función va a tener infinitas primitivas.
4.1.1. Primitiva de una función.
Definición
Dada una función, f(x), definida en un intervalo, se dice que F(x) es una primitiva de f(x) si y sólo si F(x) es
derivable en dicho intervalo y verifica que F'(x) = f(x) para cualquier valor del citado intervalo.
Dada una función f(x), a partir de la definición dada anteriormente y teniendo en cuenta las propiedades de la
derivada, se verifica:
* Si F(x) es una primitiva de f(x), entonces también lo son cada una de las funciones:
G(x) = F(x) + C
∀C∈R
* Si F(x) y G(x) son dos primitivas de f(x), entonces F(x) - G(x) es constante.
* Si f(x) es continua, entonces tiene primitivas.
* Sean f(x) y g(x) dos funciones y F(x), G(x) sus respectivas primitivas, entonces se verifica:
- F(x) + G(x) es primitiva de f(x) + g(x).
- k·F(x) es primitiva de k·f(x).
- F(x)·G(x) es primitiva de f(x)·G(x) + F(x)·g(x).
- F[G(x)] es una primitiva de f [G(x)]·g(x).
4.1.2. Integral indefinida.
Se llama integral indefinida de f(x) al conjunto de todas las primitivas de f(x), se denota por: ∫f(x) dx
esta notación se lee integral de f(x) respecto de x.
Si F(x) es una primitiva de f(x), para indicar que la integral indefinida es el conjunto de todas las primitivas, se
pone:
∫f(x) dx = F(x) + C
A f(x) se le llama integrando, el símbolo ∫ se llama signo de integración, dx nos indica respecto que variable
estamos integrando; no debe considerarse nunca que f(x) dx indica un producto o algo similar. A los símbolos que
aparecen en esta notación no se les debe asignar significados independientes, sino que tienen que ser interpretados como
partes de un todo indivisible.
El objetivo de esta parte del tema es el de hallar primitivas elementales, si las hay, de funciones elementales; es
decir, dada una función elemental f(x), diremos que se ha integrado elementálmente cuando hallamos encontrado una
primitiva suya F(x) que sea, a su vez, una función elemental.
Una función es elemental cuando puede expresarse como suma, producto, división, composición (incluida la
inversa) de funciones: polinómicas, racionales, irracionales, trigonométricas, exponenciales y logarítmicas.
Hay funciones elementales que son fácilmente integrables, otras para las que resulta mas complicado encontrar
una primitiva suya que sea elemental y por último algunas que no poseen primitivas elementales. Así pues el proceso de
búsqueda de éstas suele ser difícil y laborioso, en este tema daremos unas pocas herramientas para realizar esta tarea.
Ejemplos
- ∫cosx dx = senx + C
- ∫(4x3 + 3) dx = x4 + 3x + C
Estas integrales nos deben resultar fáciles de obtener a partir de la definición. Sin embargo, las que aparecen a
continuación serían más difíciles:
MATEMÁTICAS I
F.R.M.
Integrales
4.2
x2
+C
2
x
x
1
1 + x 2 dx =
(1 + x 2 ) 3 −
1 − x 2 − ln(x + 1 + x 2 ) + C
4
8
8
− ∫ x ⋅ tan 2 xdx = x ⋅ tan x + ln | cos x | −
− ∫ x2
Incluso hay funciones elementales para las que se desconocen primitivas:
e−x ,
2
e x 1 senx cosx
,
,
,
, senx , 3 x 1 − x , x ⋅ tanx
x lnx x
x
4.1.3. Propiedades.
1.- La integral de la suma de funciones es la suma de las integrales:
∫[f(x) ± g(x)] dx = ∫f(x) dx ± ∫g(x) dx
2.- La integral del producto de una constante por una función es igual al producto de la constante por la integral de la
función:
∫k·f(x) dx = k·∫f(x) dx
k∈R
3.- La derivada de la integral de una función es la propia función:
[∫f(x) dx]' = f(x)
4.- La integral de la derivada de una función es la propia función mas una constante arbitraria:
∫f'(x) dx = f(x) + C
4.1.4. Integrales inmediatas.
El término integral inmediata no responde a una realidad objetiva. Podemos llamar con ese nombre a todas
aquellas integrales que obtengamos sin realizar cálculos, de un vistazo. Evidentemente, al principio hay muy pocas
integrales que resulten inmediatas; una vez hayamos avanzado en estas tareas, hay muchas más. No obstante lo dicho, y
salvo pequeñas variaciones, llamaremos integrales inmediatas a las que se obtienen de leer la tabla de derivadas en
sentido inverso es decir, las que aparecen en la siguiente relación:
a
∫ x dx =
∫
x a +1
+C
a +1
dx
∫ cos x = tan x + C
2
dx
= ln x + C
x
∫ e dx = e
x
x
∫ a dx =
x
dx
∫ sen x = − cot anx + C
2
dx
+C
∫ 1+ x
ax
+C
ln a
∫
∫ senxdx = − cos x + C
2
= arctan x + C
dx
1- x2
= arcsenx + C
∫ cosxdx = senx + C
A continuación relacionamos tres integrales que, aunque no son inmediatas, conviene conocer ya que
desempeñan un papel muy destacado:
∫ tan x dx = − ln cos x + C ∫
dx
1+ x
2
= ln(x + 1 + x 2 ) + C
∫
dx
x −1
2
= ln x + x 2 − 1 + C
Basándonos en las propiedades de las primitivas, las de la integral indefinida y en la tabla anterior daremos
unos métodos generales de integración que nos permitirán abordar el cálculo integral para el presente curso y que
servirán de base para las técnicas que se utilizarán en cursos posteriores.
MATEMÁTICAS I
F.R.M.
Integrales
4.3
4.2. Integración por descomposición.
Este método se basa en la linealidad de la integral, es decir, que la integral de una combinación lineal de
funciones es una combinación lineal de cada una de las integrales por separado:
∫[k1·f(x) + k2·g(x)] dx = k1·∫f(x) dx + k2·∫g(x) dx
y consiste en expresar el integrando como suma de funciones que sabemos integrar; la integral buscada será entonces la
suma de cada una de las integrales en las que se descompone la inicial.
Ejemplos
a ) ∫ tan 2 xdx
∫ tan xdx = ∫ (tan
2
b) ∫
2
x + 1 − 1)dx = ∫ (tan 2 x + 1)dx − ∫ dx = tan x − x + C
xdx
(x - 1) 2
xdx
1 + x −1
dx
x −1
1
∫ (x - 1) 2 = ∫ ( x − 1) 2 dx = ∫ (x − 1) 2 + ∫ ( x − 1) 2 dx = − x − 1 + ln x − 1 + C
c) ∫ senax ⋅ cosbxdx
1
Sabiendo que : senα ⋅ cosβ = [sen (α + β) + sen (α − β)] y considerando en este caso α = a ⋅ x y β = b ⋅ x, resulta :
2
1
1
cos(a + b) x cos(a − b) x
∫ senax ⋅ cosbx dx = 2 ∫ sen(a + b)x dx + 2 ∫ sen(a - b)x dx = − 2(a + b) − 2(a − b) + C siendo a ≠ ± b
4.3. Integración de funciones racionales.
Las integrales que vamos a estudiar en este apartado son de la forma:
P( x )
∫ Q(x )dx
donde P(x) y Q(x) son polinomios.
Si grad(P(x)) ≥ grad(Q(x)), dividimos el numerador, P(x), entre el denominador, Q(x), y obtenemos un
cociente, C(x) y un resto, R(x), con lo que podemos expresar el cociente de la siguiente forma:
P( x )
R (x )
= C( x ) +
Q( x )
Q( x )
donde R(x) tiene menor grado que Q(x), y la integral quedaría:
P( x )
R (x)
∫ Q(x ) dx = ∫ C(x )dx + ∫ Q(x) dx
así pues, se ha descompuesto la integral en suma de integrales; la primera inmediata, ya que es una integral polinómica,
y la segunda una integral racional de fracción irreducible.
Ejemplo
x 2 + 3x + 1
∫ x − 1 dx
si dividimos P(x) = x2 + 3x + 1 entre Q(x) = x - 1, obtenemos que: x2 + 3x + 1 = (x+4)·(x-1) + 5.
Luego la integral quedaría de la forma:
x 2 + 3x + 1
5
( x + 4) 2
dx
=
(
x
+
4
)
dx
+
dx
=
+ 5 ln x − 1 + C
∫ x −1
∫
∫ x −1
2
Es decir sólo nos tenemos que preocupar de resolver las integrales racionales de fracción irreducible; en este
caso la estrategia a seguir es proceder a descomponer el denominador, Q(x), en factores primos y posteriormente tratar
MATEMÁTICAS I
F.R.M.
Integrales
4.4
de expresar el cociente como suma de fracciones cuyos denominadores son los distintos factores divisores del
polinomio Q(x).
Al efectuar la descomposición del denominador en factores primos pueden presentarse los siguientes casos.
4.3.1. Raíces reales y simples.
En este caso el denominador lo podemos factorizar de la siguiente forma:
Q(x) = (x - α)·(x - β)· · ·(x - λ)
donde α, _, · · ·, λ ∈ R
entonces podemos descomponer la fracción de la siguiente forma:
P( x )
A
B
L
=
+
+ ⋅⋅⋅ +
Q( x ) x − α x − β
x-λ
donde A, B, · · ·, L son números reales que posteriormente aprenderemos a determinar. De esta forma la integral que
estamos intentando resolver quedaría:
P( x )
dx
dx
dx
∫ Q(x) dx = A ∫ x − α + B∫ x − β + ⋅ ⋅ ⋅ +L∫ x - λ
cada integral del segundo miembro es inmediata , es decir:
dx
∫ x − α = ln x − α + C
4.3.2. Raíces reales y múltiples.
En este caso el denominador al factorizarlo queda de la forma:
donde α, β, · · ·, λ ∈ R
Q(x) = (x - α)a·(x - β)b· · ·(x -λ)l
siendo a, b, · · ·, l el orden de las raíces. Cuando esto ocurre la fracción se puede descomponer de la siguiente forma:
Aa
Bb
P( x )
A1
A2
B
B2
=
+
+ ⋅⋅⋅ +
+ 1 +
+ ⋅⋅⋅ +
+ ⋅⋅⋅⋅
2
a
2
Q( x ) x − α ( x − α)
( x − α)
x − β ( x − β)
( x − β) b
donde A1 , A2 , · · ·, Aa , B1 , B2 , · · ·, Bb son números reales. Por lo tanto la integral quedaría:
P( x )
dx
dx
dx
dx
dx
dx
+ B1 ∫
+ B2 ∫
+ ⋅ ⋅ ⋅ + Bb ∫
+ ⋅⋅⋅⋅
( x − α) a
x −β
( x − β) 2
( x − β) b
las integrales del segundo miembro son de dos tipos; unas de tipo logaritmo, que corresponden al caso anterior, que
sabemos realizar y otras de tipo potencial, que se resuelven del siguiente modo:
∫ Q(x) dx = A ∫ x − α + A ∫ (x − α)
1
2
+ ⋅ ⋅ ⋅ + Aa ∫
2
dx
( x − ρ) − r +1
1
−r
=
(
x
−
ρ
)
dx
=
+C=
+C
∫ (x − ρ) r ∫
− r +1
(1 − r ) ⋅ ( x − ρ) r −1
4.3.3. Alguna raíz es compleja pero simple.
Si alguna raíz es compleja y simple significa que en la descomposición en factores primos del denominador
aparece al menos un polinomio de segundo grado con el discriminante negativo, es decir, en general podríamos poner el
denominador, Q(x), como sigue:
Q(x) = (x - α)a·(x - β)b· · ·(x2+ px + q)·(x2+ p1x +q1 )· · ·
entonces el cociente puede ser descompuesto de la siguiente forma:
Aa
Bb
P( x )
A1
A2
Cx + D
C x + D1
=
+
+ ⋅⋅⋅ +
+ ⋅⋅⋅ +
+ ⋅⋅⋅ + 2
+ 2 1
+ ⋅⋅⋅
2
a
b
Q( x ) x − α ( x − α)
( x − α)
( x − β)
x + px + q x + p1 x + q1
donde A1 , A2 , · · ·, Aa , · · ·, Bb , · · ·, C, D, C1 , D1 , son números reales. Por lo tanto la integral quedaría:
Cx + D
C x + D1
dx + ∫ 2 1
dx + ⋅ ⋅ ⋅
x + px + q
x + p1 x + q1
Las integrales del segundo miembro son de tres tipos; los dos primeros corresponden a los descritos
anteriormente, es decir, tipo logaritmo y tipo potencial y el tercero se descompone en dos una que va a resultar un
logaritmo y otra que corresponde a un arco tangente.
P( x )
dx
dx
∫ Q(x ) dx = A ∫ x − α + ⋅ ⋅ ⋅ + A ∫ (x − α)
1
MATEMÁTICAS I
a
a
+ ⋅⋅⋅ + ∫
2
F.R.M.
Integrales
4.5
Veamos como se resuelve:
Cx + D
x
dx
∫ x 2 + px + q dx =C∫ x 2 + px + q dx + D∫ x 2 + px + q
1442443
142
4 43
4
(1) Tipo logaritmo
( 2 ) Tipo arco tangenge
Vamos a resolver por separado cada una:
(1) Tipo logaritmo
∫x
=
2
x
1
2x
1 2x + p - p
dx = ∫ 2
dx = ∫ 2
dx =
2 x + px + q
2 x + px + q
+ px + q
1
2x + p
p
1
1
p
1
dx − ∫ 2
dx = ln x 2 + px + q − ∫ 2
dx
2
∫
2 x + px + q
2 x + px + q
2
2 x + px + q
1442443
Tipo arco tangente
como vemos al resolver esta primera integral, de nuevo nos aparece la integral tipo arco tangente, que es la que vamos a
resolver a continuación.
( 2) Tipo arco tangente
1
1
1
a
∫ x 2 + px + q dx = ∫ ( x + p ) 2 + (q − p ) dx = ∫ ( x + p2 ) 2 + a 2 dx = ∫ a 2 t 2 + a 2 dt =
2
2
144444
42444444
3
123
Vamos a llamar
p
a este número a
llamamos x + = a⋅t →dx = adt
2
2
2
=
1
1
1
1
x + p2
dt
=
arctan
t
+
C
=
arctan(
)+C
a ∫ t2 +1
a
a
a
donde a = q -
p2
2
Nos quedaría por ver un cuarto caso, cuando las raíces de Q(x) son complejas y múltiples, pero éste es poco
frecuente y además su resolución es bastante complicada, además no está dentro de los objetivos del presente curso, por
lo que no lo resolveremos aquí.
4.3.4. Métodos de determinación de coeficientes.
Como hemos visto en los tres apartados anteriores la forma de resolver una integral racional siempre es la
misma, descomponer el integrando en sumas de funciones racionales más simples y que son más fáciles de integrar;
sólo nos queda ver como se obtienen los valores numéricos de los coeficientes.
El primer paso que hay que dar siempre es sumar todos los sumandos de forma que obtengamos en el
denominador Q(x) y en el numerador una expresión polinómica en la que deberemos determinar cada uno de los
coeficientes; a partir de aquí hay varios métodos para lograrlo.
1.- Generar un sistema de ecuaciones, igualando coeficiente a coeficiente. Este método es el más intuitivo pero se
complica bastante cuando el número de coeficientes que hay que determinar es mayor que tres.
Ejemplo
x +3
;
x 2 + 3x + 2 = ( x + 2) ⋅ ( x + 1)
x + 3x + 2
x +3
A
B
A ⋅ ( x + 1) + B ⋅ ( x + 2) ( A + B) x + A + 2B
=
+
=
=
2
x + 3x + 2 x + 2 x + 1
( x + 2) ⋅ ( x + 1)
( x + 2) ⋅ ( x + 1)
2
Como los denominadores son iguales también tienen que serlo los numeradores, es decir obtenemos una igualdad
polinómica:
A + B = 1
x + 3 = ( A + B) x + A + 2B ⇒
⇒ A = −1 y B = 2
A + 2 B = 3
MATEMÁTICAS I
F.R.M.
Integrales
4.6
2.- En este caso para determinar los coeficientes sustituimos en la igualdad polinómica, anteriormente citada, los valores
de las raíces del denominador. Si seguimos con el ejemplo anterior:
x + 3 = A·(x + 1) + B·(x + 2)
sustituimos en la igualdad anterior x = -1 ⇒ 2 = B; si hacemos lo mismo con x =-2 ⇒1 = -A; es decir obtenemos los
valores de A y B directamente, sin tener que resolver ningún sistema de ecuaciones. Este método resulta útil siempre
que hay raíces simples, en el caso que las raíces sean múltiples o complejas debemos dar más valores para determinar el
resto de los coeficientes, o bien utilizamos el siguiente método.
3.- El tercer método consiste en determinar algunos coeficientes sustituyendo en la igualdad polinómica y otros
coeficientes haciéndolo en la derivada de la igualdad polinómica y si fuera necesario en las derivadas sucesivas.
Ejemplo
3x 2 − x
; x 3 − x 2 + x − 1 = ( x − 1) ⋅ ( x 2 + 1)
x3 − x2 + x −1
3x 2 − x
A
Cx + D A( x 2 + 1) + (Cx + D) ⋅ ( x − 1)
=
+
=
x3 − x2 + x −1 x −1 x2 +1
( x − 1) ⋅ ( x 2 + 1)
Como los denominadores son iguales obtenemos la siguiente igualdad polinómica:
3x2 - x = A(x2 + 1) + (Cx+D)·(x-1)
Para determinar los valores de A, C y D podemos optar por sustituir la variable x por tres valores, directamente en la
igualdad anterior, y así obtener los coeficientes; o bien, utilizar también la derivada:
6x - 1 = A2x + C(x-1) + Cx + D
y sustituir en ella.
Si trabajamos con la primera igualdad: para x = 1, tenemos 2 = 2A, es decir A = 1.
para x = 0, tenemos 0 = A - D, es decir D = 1.
Si en la segunda igualdad hacemos x = 0, tenemos -1= -C + D, es decir C = 2.
Ejemplo
A continuación resolveremos una integral racional:
x 3 + 3x 2 − x + 3
∫ 2x 4 − 4x 3 + 3x 2 − 2x + 1 dx
en primer lugar hay que factorizar el denominador: 2x4 - 4x3 + 3x2 - 2x + 1 = (x - 1)2·(2x2 + 1); es decir, estamos ante
una función racional con una raíz real doble y una raíz compleja con lo que podemos realizar la siguiente
descomposición en fracciones simples:
x 3 + 3x 2 − x + 3
A1
A2
Cx + D A1 ( x − 1) ⋅ (2 x 2 + 1) + A 2 ( 2x 2 + 1) + (Cx + D) ⋅ ( x − 1) 2
=
+
+
=
2 x 4 − 4 x 3 + 3x 2 − 2x + 1 x − 1 ( x − 1) 2 2 x 2 + 1
( x − 1) 2 ⋅ (2 x 2 + 1)
si igualamos los numeradores, obtenemos:
x3 + 3x2 - x + 3 = A1 (x - 1)·(2x2 + 1) + A2 (2x2 + 1) + (Cx + D)·(x - 1)2
para x = 1, obtenemos: 6 = 3A2 , es decir: A2 = 2.
para x = 0, obtenemos: 3 = -A1 + A2 + D , es decir: D - A1 = 1.
derivando la igualdad obtenemos:
3x2 + 6x - 1 = A1 [2x2 + 1 + (x - 1)·4x]+ A2 4x + C(x - 1)2 + (Cx + D)·2(x - 1)
para x = 1, obtenemos: 8 = 3A1 + 4A2 , es decir A1= 0 y por lo tanto D = 1. Sólo nos queda determinar C; haciendo en
la última igualdad x = 0, se tiene: -1 = A1 + C - 2D, es decir C = 1. Por lo tanto:
x 3 + 3x 2 − x + 3
2
x +1
=
+ 2
4
3
2
2
2x − 4 x + 3x − 2 x + 1 ( x − 1)
2x + 1
y la integral queda reducida a calcular la suma de dos integrales:
x 3 + 3x 2 − x + 3
dx
x +1
−2 1
2
2
∫ 2x 4 − 4x 3 + 3x 2 − 2x + 1 dx = 2∫ (x − 1) 2 + ∫ 2x 2 + 1 dx = x − 1 + 4 ln(2x + 1) + 2 arctan( 2 ⋅ x ) + C
144444444244444444
3
Hemos hecho las integrales aparte
MATEMÁTICAS I
F.R.M.
Integrales
4.7
dx
( x − 1) −2 +1
−1
−2
=
(
x
−
1
)
dx
=
+C=
+C
∫ ( x − 1) 2 ∫
− 2 +1
x −1
x +1
x
dx
1
4x
dx
1
2
dx = ∫ 2 dx + ∫ 2
= ∫ 2 dx + ∫
= ln(2 x 2 + 1) +
arctan( 2 ⋅ x ) + C
2
2
+1
2x + 1
2 x + 1 4 2x + 1
2
( 2 ⋅ x) + 1 4
∫ 2x
4.4. Integración por partes.
A partir de la derivada de un producto podemos obtener una fórmula que nos será muy útil en el cálculo
integral. Como sabemos: [u(x)·v(x)]' = u'(x)·v(x) + u(x)·v '(x), si integramos en ambos lados de la igualdad tenemos:
∫ [u(x)·v(x)]'dx = ∫u'(x)·v(x) dx + ∫u(x)·v '(x) dx y como ∫ [u(x)·v(x)]'dx = u(x)·v(x) + C se tiene:
∫u(x)·v '(x) dx = u(x)·v(x) - ∫u'(x)·v(x) dx
que si utilizamos la notación diferencial: dv = v'(x) dx, du = u'(x) dx, queda la expresión:
∫u dv = u·v - ∫v du
Este método sólo es válido para funciones derivables; al aplicarlo pueden aparecer dos situaciones:
* En algunos casos se reduce la integral a otra más sencilla.
∫x·lnx dx ; se considera u = lnx y dv = x dx
* En otros se reproduce la integral de partida.
∫ex·senx dx ; se considera u = senx y dv = ex dx
hay que realizar la integración por partes dos veces consecutivas, siguiendo ese esquema, y entonces nos aparecerá:
∫ex·senx dx = ex·senx - ex·cosx - ∫ex·senx dx
si pasamos la integral del segundo miembro al primero se tiene: 2∫ex·senx dx = ex·senx - ex·cosx; por tanto:
e x (senx − cos x )
+C
2
Como hemos visto es habitual que al proceder a integrar por partes se obtenga una integral en el segundo
miembro que, nuevamente, deba integrarse por partes. En estos casos, no es conveniente utilizar la constante de
integración, C, hasta el final. Por último las integrales que contienen logaritmos, funciones trigonométricas inversas,
productos de potencias, xn, con logaritmos, exponenciales y funciones trigonométricas se integran, principalmente,
realizando una o más veces el proceso de integración por partes. Es decir las integrales de las formas:
∫R(xn , emx) dx , ∫R(x , lnx) dx , ∫R(x , arc sen mx) dx , ∫R(x , arc cos mx) dx ,∫xn·lnx dx ,
∫xn·(lnx)m dx , ∫xn·senx dx , ∫xn·cosx dx , ∫xn·arc senx dx , ∫xn·arc cosx dx , ∫xn·arc tanx dx
donde R(··) indica una función racional de los argumentos que señala, son todas reducibles por integración por partes,
esto significa que o bien se obtiene una nueva integral que se puede realizar por partes o bien obtenemos una integral
racional, que siempre sabremos realizar o bien aparece una integral correspondiente a un cambio de variable de los que
daremos en el siguiente apartado.
Las integrales de los tipos:
∫enx·sen mx dx
o
∫enx·cos mx dx
son integrables por partes, reproduciéndose la integral de partida.
También se reducen por integración por partes las integrales de las formas:
∫Pn(x)·emx dx , ∫Pn(x)·sen mx dx , ∫Pn(x)·cos mx dx
donde Pn(x) es un polinómio de grado n.
x
∫ e ⋅ senx dx =
4.5. Integración por cambio de variables.
La regla de la cadena, para derivar una función compuesta, permite obtener un método de integración en el que
la variable x se "sustituye" por una nueva variable t; la relación x = φ(t) que liga ambas variables se dice que
proporciona el "cambio de variable". Para poder hacer esto es necesario que la función x = φ(t) sea diferenciable, en
función de t, y además que exista la función inversa t = ψ(x); bajo estas condiciones se verifica:
f(x) dx = f[φ(t)]·φ'(t) dt = g(t) dt donde g(t) = f[φ(t)]·φ'(t)
Ahora bien, si conocemos una primitiva de g(t), G(x), entonces la función F(x) = G[ψ(x)] es una primitiva de
f(x) con lo que quedaría resuelta la integral ya que:
∫f(x) dx = ∫f[φ(t)]·φ'(t) dt = ∫ g(t) dt = G(x) + C = G[ψ(x)] + C
MATEMÁTICAS I
F.R.M.
Integrales
4.8
Ejemplo
xdx
∫ 1+ x
4
=
1 dt
1
1
= arctan t + C = arctan x 2 + C
∫
2
242
1 +4
t
2
2
1
3
Hacemos x 2 = t
luegos 2x dx = dt
En este caso hemos considerado directamente la función inversa t = ψ(x), esto se puede hacer siempre que
resulte mas cómodo para la realización de la integral, a continuación veremos un ejemplo en el que utilizamos el cambio
directamente.
∫
1
3
x −1
3t 2
∫ t − 1 dt
1
424
3
dx =
= 3∫ ( t + 1 +
1
t2
3
)dt = 3( + t + ln t − 1 ) + C = 3 x 2 + 33 x + ln 3 x − 1 + C
t −1
2
2
Hacemos el cambio x = t 3
luego tenemos dx = 3⋅ t 2 dt
Antes de aplicar este método debemos tener en cuenta las siguientes consideraciones:
* No se puede aplicar algunas veces debido a la dificultad de encontrar un cambio de variable adecuado, si bien, una vez
encontrado el proceso suele ser sencillo.
* Puede tomarse como norma considerar un cambio de variable análogo al que nos ha funcionado con una integral muy
parecida. No siempre obtendremos con un cambio de variable el resultado apetecido, por ello, puede que haya que
realizar varios cambios encadenados.
* Es recomendable utilizar un cambio que simplifique la expresión de la función que tengamos que integrar. Por
ejemplo si existe una raíz de la variable, intentar hacer desaparecer dicha raíz.
A continuación vamos a dar algunos casos en los que se recomienda el cambio de variable adecuado, esto no
significa que siempre haya que realizar esas integrales utilizando los cambios facilitados, en ocasiones hay "atajos" que
hacen que el proceso sea más corto, lo seguro es que siguiendo las indicaciones podremos resolver la integral.
4.5.1. Integración de algunas funciones irracionales.
Las integrales que se muestran en este apartado corresponden a funciones racionales de potencias radicales de
la variable; a estas funciones las denotaremos de la forma: R(xn , p√xq).
En general, para integrar estas funciones se aplican cambios bien conocidos que reducen la integral irracional a
una racional o trigonométrica.
4.5.1.1. Cambio de variable potencial.
A continuación se exponen los cambios de variables conocidos para algunos casos particulares:
p1
q1
p2
q2
* ∫ R(x, x , x ,⋅ ⋅ ⋅)dx
El cambio de variable recomendado es x = tn, donde n = m.c.m.(q1 , q2 , · · ·); una vez realizado el cambio de
variable, la integral se reduce a una integral racional de variable t, que puede ser abordada con los métodos que ya
conocemos.
p1
p2
1
2
* ∫ R[x, ( ac⋅⋅xx ++db ) q , ( ac⋅⋅xx ++db ) q ,⋅ ⋅ ⋅]dx
a⋅x+b n
El cambio recomendado en este caso sería c ⋅ x + d = t , donde, n = m.c.m.(q1 , q2 , · · ·); una vez
realizado el cambio de variable, la integral se reduce a una integral racional de variable t.
* ∫ R(x, n ax + b )dx
El cambio de variable recomendado es ax + b = tn, reduciéndose la integral, de nuevo, a una racional con la
nueva variable t.
* ∫ R(x, n
a⋅x + b
c⋅ x + d
)dx
En este caso el cambio de variable adecuado es
en la variable t.
MATEMÁTICAS I
a⋅x+b n
= t. La integral se reduce a una integral racional
c⋅x +d
F.R.M.
Integrales
4.9
Ejemplos
− ∫ x 3 + 2 x 2 dx
−∫3
x +1
x+2
dx
− ∫ x 2 x + 1 dx
−∫
−∫
dx
3
x − x
dx
2
x 1− x
4.5.1.2. Cambio de variable trigonométrico.
Los siguientes casos particulares de integrales irracionales se reducen mediante un cambio de variable
trigonométrico:
* Para
* Para
* Para
x 2 + α 2 ) dx , se utiliza el cambio x = α ⋅ tan t.
∫ R(x,
∫ R(x,
∫ R(x,
x 2 − α 2 ) dx , se utiliza el cambio x = α ⋅ sec t.
α 2 − x 2 ) dx , se utiliza el cambio x = α ⋅ sent
En el último caso también se puede utilizar x = α·cost.
Ejemplo
− ∫ 1 − x 2 dx
− ∫ x 2 − 1dx
− ∫ 2 + x 2 dx
−∫
x
3 − x2
dx
2
4.5.1.3. Caso R(x , ax + bx + c )
2
Cuando aparezca una integral del tipo: ∫ R ( x , ax + bx + c ) dx , los cambios recomendados son los
correspondientes a desarrollar las igualdades que a continuación se detallan:
− Si a > 0, se considera : ax 2 + bx + c = t + x a (ó t - x a )
− Si c > 0, se considera : ax 2 + bx + c = xt + c (ó xt - c )
− Si ax 2 + bx + c tiene dos raíces distintas α, β se considera ax 2 + bx + c = t ⋅ ( x − α)
Ejemplo
−∫
−∫
dx
x + x +1
dx
2
x 4x 2 − 4x − 1
MATEMÁTICAS I
F.R.M.
Integrales
4.10
4.5.2. Integración de funciones trigonométricas.
En este apartado consideraremos también, que R(···), como en los anteriores, es una expresión racional de los
argumentos que aparezcan en cada caso.
Las integrales de la forma: ∫R(senx , cosx) dx, siempre se pueden transformar en integrales racionales
utilizando el siguiente cambio de variable:
t = tan x2 ↔ x = 2 arctan t
2dt
1+ t2
2tan x2
2t
1 − tan 2
y sabiendo que senx =
=
;
cos
x
=
1 + tan 2 x2 1 + t 2
1 + tan 2
dt = 12 (1 + tan 2 x2 ) ↔ dx =
x
2
x
2
=
1− t2
1+ t2
con lo que:
1 - t 2 2dt
)
1+ t2 1+ t2
es decir, obtenemos una integral racional en la variable t. Este cambio siempre es válido independientemente del tipo de
función racional en senos y cosenos, es decir, siempre podremos resolver una integral de este tipo utilizándolo, aunque
en algunos casos especiales, como los que describiremos a continuación, hay cambios que hacen que la resolución de la
integral se realice por un camino más rápido.
2t
∫ R (senx, cos x )dx = ∫ R (1 + t
2
,
* Si R(-senx , -cosx) = R(senx , cosx), es decir si la expresión del integrando es par en seno y coseno, es conveniente
utilizar el cambio: t = tanx.
∫senax·cosbx dx ; ∫cosax·cosbx dx
* ∫senax·senbx dx ;
En este caso no es necesario realizar nigún cambio de variable, se reducen a integrales inmediatas mediante las
expresiones trigonométricas:
senax·senbx = ½[cos(a-b)x - cos(a+b)x]
senax·cosbx = ½[sen(a-b)x + sen(a+b)x]
cosax·cosbx = ½[cos(a-b)x + cos(a+b)x]
* ∫R(senx)·cosx dx
Hacemos el cambio t = senx.
* ∫R(cosx)·senx dx
Hacemos el cambio t = cosx.
* ∫senmx dx
y
∫cosmx dx
con m ∈ N.
- Si m es impar, es decir m = 2·k + 1, aplicamos la igualdad: sen2x + cos2x = 1, y nos queda:
∫senmx dx = ∫sen2kx·senx dx = ∫(1 - cos2x)k·senx dx
∫cosmx dx = ∫cos2kx·cosx dx = ∫(1 - sen2x)k·cosx dx
que corresponden al caso anterior, hacemos respectivamente cosx = t y senx = t, quedando integrales
polinómicas, que al desarrollar la potencia son inmediatas.
- Si m es par, es decir m = 2·k, aplicamos:
1 = sen 2 x + cos 2 x
⇒ sen 2 x = 12 (1 − cos 2 x ) ; cos 2 x = 12 (1 + cos 2x )
2
2
cos 2 x = cos x − sen x
∫senmx dx = ∫sen2kx dx = ∫(½)k·(1 - cos2x)k dx
∫cosmx dx = ∫cos2kx dx = ∫(½)k·(1 + cos2x)k dx
que son integrales de menor grado que las anteriores; desarrollando la potencia quedarían integrales de orden
impar y par, con lo que habría que proceder de forma análoga para reducirlas, hasta que consigamos integrales
inmediatas.
MATEMÁTICAS I
F.R.M.
Integrales
4.11
* ∫sen x·cosmx dx
con n, m ∈ Z.
- Si uno de los dos números es positivo e impar, entonces aplicamos la igualdad sen2x + cos2x = 1, reduciendose
a una integral de las siguientes:
∫R(senx)·cosx dx ó ∫R(cosx)· senx dx
que han sido resueltas con anterioridad.
- Si los dos números son positivos y pares, entonces se aplican las igualdades:
senx·cosx = ½ sen2x ; sen2x = ½(1-cos2x) ; cos2x = ½(1+cos2x)
y la integral se reduce a una integral de las siguientes:
∫senmx dx
ó
∫cosmx dx
que también han sido estudiadas anteriormente.
n
4.5.3. Integración de otras funciones transcendentes.
Las integrales de la forma:
∫R(amx, anx, · · · ) dx
se reducen a una integral racional haciendo el cambio t = ax ; quedando la integral como sigue:
1 1
R ( t m , t n ,⋅ ⋅ ⋅)dt
ln a ∫ t
en particular: ∫R(emx, enx, · · · ) dx
1
∫ t R (t
m
se reduce haciendo el cambio t = ex , quedando la integral:
, t n ,⋅ ⋅ ⋅)dt
Ejemplo.
e2x + 1
∫ e3 x − e x dx
1
Consideramos e x = t; y por tanto x = lnt dx = dt luego :
t
2x
2
2
e +1
t −1 1
t −1
∫ e3 x − e x dx = ∫ t 3 − t ⋅ t dt = ∫ t 2 (t − 1) dt
que ya es una integral racional.
4.6. Estrategias de integración.
Determinar la integral indefinida de una función no es un proceso sencillo y mucho menos mecánico. En
algunos casos, la integral puede reducirse mecánicamente mediante los métodos de integración expuestos en este tema.
Integrar plantea una situación de trabajo de experto; es decir, la experiencia acumulada por una persona en integración
permite albergar la esperanza que dicha persona obtenga un resultado provechoso. Aunque la experiencia no siempre es
garantía de éxito.
No existe una estrategia global que permita determinar una integral cualquiera, por ello es conveniente destacar
los siguientes pasos como los que habría que dar ante una integral desconocida:
* Comprobar si se trata de una integral inmediata o si con una pequeña modificación se transforma en una integral
inmediata.
* Determinar si se trata de una integral racional, irracional, trigonométrica o transcendente.
* Intentar el proceso de integración por partes.
* Observar si es similar a una integral que hayamos realizado, para ver si se puede reducir de una forma parecida.
* Intentar, por último, un cambio de variable.
MATEMÁTICAS I
F.R.M.
Integrales
4.12
4.7. Aproximación intuitiva al concepto de integral definida. Propiedades.
A lo largo del siglo XVII se inició en Europa una corriente investigadora encabezada por Newton y Leibniz que
contribuyó de manera especial al la resolución de los dos grandes problemas del cálculo infinitesimal. El primero de
ellos se centraba en la determinación de la recta tangente a una curva dada, es decir, el problema fundamental del
cálculo diferencial, mientras que el segundo de estos problemas consistía en determinar el área encerrada por una curva
plana, lo que constituye el problema fundamental del cálculo integral.
4.7.1. Área bajo una curva. Integral definida.
Veamos como calcular el área bajo una curva que corresponde a la representación gráfica de la función y = f(x)
en el intervalo [a , b]. Por ello entenderemos el área que limitan la curva, el eje OX y las rectas verticales x = a y x = b.
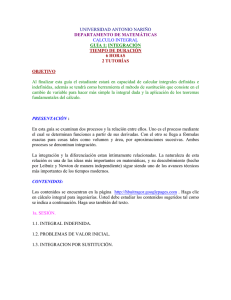
Para calcular el área encerrada por la curva en el intervalo [a , b], dividimos dicho intervalos en subintervalos,
definimos para cada uno de ellos tres recintos rectangulares de alturas:
M: Valor máximo de f(x) en el subintervalo.
m: Valor mínimo de f(x) en el subintervalo.
H: Valor arbitrario de f(x) comprendido entre m y M.
Es evidente que la suma de las
áreas de los recintos de altura M,
que llamaremos Sn , es mayor que
el área encerrada por la curva, Sab
, y a su vez, ésta es mayor que la
suma de las
áreas de los
rectángulos de altura m, sn, es
decir:
sn ≤ Sab ≤ Sn
donde "n" indica el número de
particiones que hemos realizado
en el intervalo [a , b]. Y además si
consideramos cualquier suma de
áreas rectangulares, S'n, también
está comprendida entre las dos
anteriores:
sn ≤ S'n ≤ Sn.
Tenemos así un método
aproximado para calcular el área
bajo una curva: tomando un cierto número de subdivisiones del intervalo [a , b], podemos estimar que el área bajo la
curva es igual a la suma de los recintos rectangulares que tienen como base la amplitud del intervalo y por altura f(ξ),
siendo ξ un valor arbitrario dentro del subintervalo.
Al valor sn , se le denomina suma inferior; a Sn se le llama suma superior. Estos valores dependen de la partición
escogida, es decir, para distintas particiones tendremos distintos valores de la suma inferior y superior.
Cuando incrementamos el número de subdivisiones el valor de sn se acerca al valor de Sn, verificándose siempre
que:
sn ≤ Sab ≤ Sn
y
sn ≤ S'n ≤ Sn. Cuando n tiende a infinito el valor de la suma inferior y el de la
suma superior coincide luego podemos poner:
lim S' = Sa b
n →∞
Es decir, el área bajo la curva en el intervalo [a , b], es igual al límite de la suma de las áreas rectangulares
intermedias:
n
Sa b = lim ∑ f (ξ i ) ⋅ ( x i − x i −1 )
n →∞
i =1
al valor del área que encierra la gráfica de la función en el intervalo [a , b], se le denomina integral definida de
la función f(x) desde a hasta b, y se denota por:
b
∫ f (x)dx
a
MATEMÁTICAS I
F.R.M.
Integrales
4.13
4.7.2. Propiedades de la integral definida.
A continuación vamos a dar una serie de propiedades que se desprenden, prácticamente, de la definición de la
integral definida.
b
I. −
∫ [k f (x ) + k g (x )]dx = k ∫
II. −
∫
III. -
∫ f (x )dx =0
IV. −
∫
1
a
b
2
b
1 a
c
b
a
c
f ( x )dx = ∫ f ( x )dx + ∫ f ( x )dx
a
b
f ( x )dx + k 2 ∫ g ( x )dx k 1 , k 2 ∈ R
a
∀c ∈ [a , b]
a
a
b
a
a
f ( x )dx = − ∫ f ( x )dx
b
b
V. − f(x) ≥ 0 ∀x ∈ [a , b] ⇒ ∫ f ( x )dx ≥ 0
a
b
b
a
a
VI. - f(x) ≤ g(x) ∀x ∈ [a , b] ⇒ ∫ f ( x )dx ≤ ∫ g ( x )dx
VII. −
∫
b
a
b
f ( x )dx ≤ ∫ f ( x ) dx
a
VIII. − Teorema de la media (o del valor medio)
b
Si f(x) es continua en [a , b] ⇒ ∃ξ ∈ [a , b] / ∫ f ( x )dx =f (ξ) ⋅ (b − a )
a
4.8. La integral definida como función de su límite superior.
Sea f : [a , b] → R una función integrable. Para cada x ∈ [a , b] podemos considerar el siguiente valor:
x
∫ f(t)dt
a
asociado a x. Así pues, podemos definir a partir de lo anterior una nueva función , F, utilizando el valor de la integral
definida:
F : [a , b] → R
x ∈ [a , b] a ∫ f(t)dt
x
es decir:
a
x
F( x ) = ∫ f ( t )dt ∀x ∈ [a , b]
a
A continuación vamos a ver que esta nueva función que hemos construido, F(x), está íntimamente ligada a la
que nos ha servido de base para construirla, f(x), y que de alguna manera mejora las propiedades de ésta.
•
Si f(x) es una función acotada, entonces la función F(x) es continua.
• Teorema fundamental del cálculo integral.
Sea f : [a , b] → R una función continua en un punto c ∈ (a , b). Entonces la función F(x) es derivable en c, y además:
F'(c) = f(c).
Este teorema nos liga la integral definida con el cálculo de primitivas de una función y además nos servirá para,
a partir del conocimiento de una primitiva de una función, poder determinar el valor de la integral definida de dicha
función en el intervalo. Esto es lo que se conoce como la regla de Barrow.
MATEMÁTICAS I
F.R.M.
Integrales
•
4.14
Teorema. Regla de Barrow.
Sea f : [a , b] → R una función integrable, y g : [a , b] → R una primitiva suya. Entonces:
b
∫ f (x)dx = g(b) − g(a )
a
Observación: La integral indefinida de una función continua es una función derivable, y la integral indefinida
de una función acotada es una función continua. Así pues, si una función es discontinua en un conjunto finito de puntos,
con discontinuidades evitables o de salto, entonces la integral de ésta es una función continua. La función definida a
partir de la integral poseerá, a lo sumo, discontinuidades en aquellos puntos donde la función inicial posea
discontinuidades de tendencia al infinito o discontinuidades esenciales.
A continuación veremos algunos ejemplos de aplicación de la regla de Barrow.
1.- Si conocemos una primitiva de una función resultará muy fácil calcular el valor de la integral definida de ésta en un
intervalo.
1
1
π
π
1
∫0 1 + x 2 dx = [arctan x ]0 = arctan(1) − arctan(0) = 4 − 0 = 4
x2
2.- Consideremos la función F( x ) = ∫0 ln(tan t )dt . Determinar el valor de F '(x).
Para resolver este tipo de problemas consideramos una función primitiva, g(x), de f(x) = ln(tanx); y aplicando la
regla de Barrow tenemos:
F( x ) = ∫ ln(tan t )dt = [g ( t )]0 = g ( x 2 ) − g (0) ⇒ F' ( x ) = g ' ( x 2 ) ⋅ 2x
x2
x2
0
como g(x) es una primitiva de f(x) = ln(tanx) ⇒ g'(x) = f(x). Luego:
F'(x) = 2x·ln(tanx2)
4.8.1.- Cálculo de la integral definida.
Para calcular una función primitiva, y de esta forma poder aplicar la regla de Barrow, hemos utilizado dos
métodos: integración por partes y por cambio de variable. Veamos como tenemos que aplicar en cada caso la regla de
Barrow.
4.8.1.1. Integración por cambio de variable.
Supongamos que para calcular una primitiva de la función f(x) se requiere el cambio de variable x = φ(t), cuya
función debe cumplir las siguientes condiciones:
1ª El intervalo [a , b] se transforma en el intervalo [c , d], mediante φ-1(x), de manera que, cuando t varía de modo
continuo en el intervalo [c , d], la función x = φ(t) lo hace igualmente en el intervalo [a , b], y además
φ(c) = a y φ(d)= b.
2ª La función φ(t) es continua y admite derivada continua , φ'(t), en el intervalo [c , d].
Bajo estas condiciones se verifica:
b
d
a
c
∫ f (x)dx = ∫ f (φ( t))φ' (t )dt
lo que nos evita tener que deshacer los cambios de variable efectuados durante el cálculo de primitivas.
Ejemplo.
2
Calcular: ∫0 sen x ⋅ cos xdx
Hacemos el cambio senx = t , cosx dx = dt. Por lo tanto los nuevos límites de integración son:
sen(π/2) = d ⇒ d = arcsen(π/2) = 1
sen 0 = c
⇒ c = arcsen 0 = 0.
luego:
π
∫
π
0
2
1
2
1
t 3 13 0 3 1
sen 2 x cos xdx = ∫ t 2 dt = = − =
0
3 0 3 3 3
MATEMÁTICAS I
F.R.M.
Integrales
4.15
4.8.1.2. Integración por partes.
Sean u(x) y v(x) dos funciones continuas que admiten derivadas, u'(x) y v'(x), continuas en el intervalo [a , b].
Entonces se verifica:
es decir:
∫
x
a
u ( t ) v' ( t )dt = u ( x ) ⋅ v( x ) − u (a ) ⋅ v(a ) − ∫ v( t )u ' ( t )dt
x
a
∫
b
a
udv = [u ⋅ v]a − ∫ vdu
b
b
a
Ejemplo.
Calcular:
1
∫ arctan xdx
0
llamamos:
u = arctan x
1
dx
1+ x2
v=x
du =
dv = dx
de donde:
1
1
1
∫ arctan xdx = [x ⋅ arctan x ]0 − ∫
1
x
1 1 2x
1
1
dx =[x ⋅ arctan x ]0 − ∫
dx = x ⋅ arctan x − ln(1 + x 2 ) =
2
2
0
0
0
1+ x
2 1+ x
2
0
1
1
π 1
= 1 ⋅ arctan 1 − ln 2 − (arctan 0 − ln 1) = − ln 2
2
2
4 2
4.9. Aplicaciones de la integral definida.
Para concluir nuestro estudio de las integrales, hemos de retornar al problema del área, que fue nuestro punto de
partida. Estamos ya en condiciones de calcular algunas áreas planas con auxilio de la integral definida. También
abordaremos otro problema próximo al del área, como es el cálculo del volumen de un cuerpo de revolución, ya sea
alrededor del eje OX como alrededor del eje OY.
4.9.1. Área de una figura plana.
En este apartado desarrollaremos el método para determinar el área de algunos tipos de regiones del plano.
4.9.1.1. Área definida por la gráfica de una función.
Sea f : [a , b] → R una función continua. Consideremos la región del plano delimitada por la gráfica de la
función f, el eje OX y las rectas x = a, x = b. Entonces:
* Si f(x) es una función no negativa. La integral entre a y b es un número
positivo y coincide con el valor del área limitada por la gráfica de la función,
el eje OX y las rectas x = a y x = b.
b
área =
∫ f(x)dx
a
* Si f(x) es una función no positiva. La integral entre a y b es un número
negativo y coincide con el opuesto del valor del área limitada por la gráfica de
la función, el eje OX y las rectas x = a y x = b.
b
− ∫ f(x)dx
a
MATEMÁTICAS I
F.R.M.
Integrales
4.16
* Si f(x) es una función que toma valores positivos y negativos dentro del
intervalo [a , b], entonces se puede descomponer como diferencia de dos
funciones positivas: f(x) = f1 (x) - f2 (x); donde:
f1 (x) = max{f(x) , 0} y
f2 (x) = max{-f(x)
f(x) , 0}
∫
b
b
c
b
f 1 ( x )dx + ∫ f 2 ( x )dx = ∫ f ( x )dx − ∫ f ( x )dx
área = área f1 + área f2 =
En general si una función tiene mas de un punto de corte con el eje de abscisas,
tendríamos:
a
∫
b
f ( x ) dx =
a
∫
c1
a
a
c2
f ( x )dx + ∫ f ( x )dx + ⋅ ⋅ ⋅ +
c1
a
∫
c
b
cn
f ( x )dx
donde c1 , c2 , · · · , cn ∈ [a , b] y son raíces de f(x) = 0, escritas de menor a mayor.
4.9.1.2. Área limitada por dos funciones.
Sean dos funciones continuas definidas en el intervalo cerrado [a , b]. Se considera la región del plano
delimitada por las dos gráficas de las funciones f y g, y por las rectas x = a y x = b.
* Si g(x) ≤ f(x) ∀ x ∈ [a , b], entonces la función f - g es no negativa.
área = b f ( x )dx − b g ( x )dx = b (f ( x ) − g ( x ))dx
∫
∫
a
a
∫
a
* Si f(x) ≤ g(x) ∀ x ∈ [a , b], entonces la función g - f es no negativa.
b
b
área = b
∫ g(x)dx − ∫ f (x)dx = ∫ (g(x) − f (x))dx
a
a
a
* Si existen valores para los que f(x) ≤ g(x) y valores tales que g(x) ≤ f(x), la función f - g toma valores positivos y
negativos; entonces:
área = b f ( x ) − g( x ) dx
∫
a
es decir, se determinan los subintervalos en los que f(x) ≥ g(x) y también aquellos en los que g(x) ≥ f(x); el área será la
suma de las integrales de f(x) - g(x) en los primeros subintervalos, junto con la suma de las integrales de g(x) - f(x) en
los segundos subintervalos.
Ejemplo.
Hallar el área de la región acotada del plano que está encerrada entre las curvas y = x4 - 4x2, y = x2 - 4.
Se comprueba que las curvas se cortan en x = -2, x = 2, x = -1, x = 1; la
región del enunciado consta de tres partes, que corresponden a: -2 ≤ x
≤ -1, -1 ≤ x ≤ 1, 1 ≤ x ≤ 2. De acuerdo con la figura el área valdrá:
∫
−1
−2
1
[( x 2 − 4) − ( x 4 − 4 x 2 )]dx + ∫ [(x 4 − 4x 2 ) − ( x 2 − 4)]dx +
−1
2
+ ∫ [(x − 4) − ( x − 4 x )]dx
2
4
2
1
4.9.2. Volumen de un sólido de revolución
En este apartado se estudia el volumen de una región del espacio delimitada por una superficie de revolución; a esta
región se le denomina sólido de revolución.
La forma de generar un sólido de revolución consiste en considerar una región del plano, en este caso vamos a
considerar una función continua cuya gráfica delimita una superficie, que al girar alrededor del eje OX, o alrededor del
eje OY, originan
ginan dichos sólidos; uno con eje de simetría OX y otro con eje de simetría OY.
MATEMÁTICAS I
F.R.M.
Integrales
4.17
4.9.2.1. Sólido con eje de simetría OX.
Consideremos una función f : [a , b] → R, continua en [a , b] y sea la región plana definida por la gráfica de la
función, el eje OX y las rectas x = a y x = b. Esta región plana se gira alrededor del eje OX.
El volumen de dicha región viene dado por:
b
V = π∫ [f ( x )]2 dx
a
4.9.2.2. Sólido con eje de simetría OY.
En este caso se considera la región plana definida por la gráfica de la función f, el eje OY y las rectas
horizontales y = m, y = M; donde:
m = min{f(x) / x ∈ [a , b]}
M = max{f(x) / x ∈ [a , b]}
Esta región al girar alrededor del eje OY determina un sólido cuyo volumen viene dado por:
b
V = 2π∫ x l ( x )dx
a
donde l(x)
(x) es la longitud de la cuerda formada por la sección vertical de la región plana determinada.
Ejemplos.
1.- Se considera la circunferencia (x--2)2 + y2 = 1. Si se hace girar dicha circunferencia alrededor
alrede
del eje OY determina
una figura geométrica llamada toro averiguar su volumen.
Para determinar la longitud de la sección vertical,
l(x), en un punto cualquiera, x, calculamos la
diferencia entre las ordenadas de cada uno de los
puntos extremos de la cuerda representada por una
línea de puntos en la figura. Por lo tanto:
con lo que el volumen del toro vendrá dado por la
siguiente integral:
3
3
1
V = 2π ∫ x ⋅ 2 ⋅ 1 − ( x − 2) 2 dx = 4π ∫ x ⋅ 1 − ( x − 2) 2 dx = 4π ∫ (t + 2) ⋅ 1 - t 2 dt =
1
1
−1
144
4
424444
3
Hacemos el cambio
t = x - 2 dx = dt
1
1
−1
−1
= 4π ∫ t 1 − t 2 dt + 8π ∫
1
1
1 − t 2 dt = 8π ∫ 1 − t 2 dt
= 16π ∫ 1 − t 2 dt
0
144−14
424444
3
1
2
∫−1 t 1− t dt = 0 ya que el integrando es impar.
∫
1 − t 2 dt = ∫ 1 − sen 2 z cosz dz = ∫ cos 2 zdz = ∫
144424443
t = senz
dt = cos zdz
=
1 + cos 2z
z sen 2z
dz = +
+C=
2
2
4
z 2senz cos z
arcsent + t 1 − t 2
+
+C=
+C
2
2
2
Luego el volumen del toro será:
1
1
1
1
1
V = 16π ∫ 1 − t 2 dt = 16π arcsent + t ⋅ 1 − t 2 = 16π( arcsen1)
0
2
2
2
0
π
como arcsen1 =
2
V = 4π 2
MATEMÁTICAS I
F.R.M.
Integrales
4.18
2
2.- Hallar el volumen del elipsoide determinado por la elipse de ecuación:
2
x
y
+ 2 = 1, al girar alrededor del eje OX.
2
a
b
La función en este caso sería:
y=
b2 2
(a − x 2 )
a2
Por lo tanto el volumen vendrá dado por:
b2 2
4
(a − x 2 )dx = π ⋅ a ⋅ b 2
2
−a
a
3
V = π∫
MATEMÁTICAS I
a
F.R.M.
Integrales
4.19
1.- Calcular por sustitución las siguientes integrales:
a )∫
dx
1 + ex
b ) ∫ x 2 e 2 x dx c) ∫
3
(lnx) 8
ex
ex
arcsenx
e arctanx
dx
dx d) ∫
dx e) ∫ 2 x
dx f ) ∫
dx g) ∫
dx h) ∫
x
2
2
x
1+ e
e +1
1
x
+
1− x
ex −1
2.- Calcular por partes las siguientes integrales:
a ) ∫ senx ⋅ ln(cos x )dx b) ∫ lnx dx c) ∫ arctanx dx d) ∫ arcsenx dx e) ∫
g )∫
lnx
dx f)∫ x ⋅ senx ⋅ cosx dx
x3
ln 2 x
xarcsenx
sen2x
dx h) ∫
dx i) ∫
dx j) ∫ xln(x + 1)dx k) ∫ (lnx)2 dx l)∫ x (1 + x 2 ) arctan xdx
2
2
x
1 + senx
1- x
3.- Hallar las siguientes integrales racionales:
dx
x3 + x +1
dx
5x 2 + 6 x + 9
dx
x6
x4
a )∫ 2
b) ∫
dx
c)
d)
dx
e)
f)
dx
g)
∫ x(x + 1) 2 ∫ (x − 3) 2 (x + 1) 2
∫ x 4 −1 ∫ x −1
∫ (x + 1)2 dx
x −1
x ( x 2 − 1)
x4 − 3
x 3 − 4x 2 + x + 8
4x 2 + 3x − 4
2 x 3 − 11x 2 + 18x − 5
3x 3 + 3x 2 + 2 x + 2
dx
i)
dx
j)
dx
k)
dx
l)
∫ x 2 − 5x + 6
∫ x 3 − x 2 − 2x
∫ x 2 − 5x + 6
∫ (x − 1)2 (2x 2 + 2x + 1) dx
x2 + x +1
4.- Calcular las siguientes integrales:
dx
sen 3 x
a ) ∫ sen 3 x ⋅ cos 2 xdx b) ∫ sen 4 x cos 2 xdx c) ∫ senx ⋅ sen2x ⋅ sen3xdx d) ∫
e) ∫
dx
3
2
sen x ⋅ cos x
cos x
dx
dx
dx
cosx
f ) ∫ sen 5 xdx g) ∫ tan 3 xdx h) ∫
i) ∫
j) ∫
k) ∫ secxdx l) ∫
dx
3
2
2
2
cos x
sen x + 2 cos x
1 + sen x
1 - cosx
dx
dx
senx + cosx
cos 3 x
dx
m)∫
n) ∫
o)
dx
p)
dx q) ∫
2
2
∫
∫
cos x ⋅ senx
sen x − cos x
1 - senx
senx
1 + senx - cosx
h )∫
5.- Calcular las integrales:
a )∫
dx
x x −2
2
x
h )∫
n )∫
1− x
3
dx i) ∫
4
x dx
4
1+ x
b) ∫
5
x2 +1
1+ x
dx
dx
x2
1+ x
dx
c)
dx
d)
e)
f)
xe
dx
g)
∫ x2
∫ x 1 - ln 2 x ∫ x cos x ∫
∫ 26 − x 6 dx
x2
2
dx
(x + 1) x
j)∫
x2
a −x
2
2
o) ∫ (x 2 + 1)3 x 3 + 3x + 1dx p) ∫
dx k) ∫
4+x
4- x
dx l)∫
1+ x
2 1
dx m) ∫ (3 + ) 4 2 dx
x x
a +x
2
2
dx
x −1
x
q) ∫ x 2 x + 1dx r)∫ 3
dx s) ∫ 2
dx
2
sen x ⋅ cos x
x + x +1
x +1
2
6.- Calcular:
x2
3x
secx
dx
2x + 4x
a )∫
dx b) ∫ x 2 ⋅ 3x + 5 dx c)∫
dx d) ∫ x 2 − 7 dx e) ∫
dx f)∫
g)
∫ 8 x + 1 dx
3
sec x
cosecx
sec 2 x
1+ x2
2 x +1
cos 2 x
dx
x 2 + 3x − 1
x
2
x
h )∫
dx
i)
e
ln
xdx
j)
dx
k)
x
arcsenxdx
l)
2
senxdx
m)
n)
∫
∫ 3x
∫
∫
∫ x − 4 x ∫ e x dx
1 − 4 x −1
1 + tanx
x -1
o) ∫ x 2 − 4dx p) ∫
dx q) ∫
dx r)∫ arctan(αx)dx con α ∈ R s) ∫ x ⋅ sec 2 xdx t) ∫ cos5 xdx
2
1 - tanx
( x + 2)
7.- Integrando por partes comprobar:
x n e ax n n −1 ax
− ∫ x e dx
a
a
n
b) ∫ (ln x ) dx = x (ln x ) n − n ∫ (ln x ) n −1 dx
a ) ∫ x n e ax dx =
c) ∫ x n ln xdx =
d) ∫
x n +1
[( n + 1) ln x − 1] + C
( n + 1) 2
x2
x
dx = tan x −
+C
2
(cos x + xsenx )
cos x (cos x + xsenx )
MATEMÁTICAS I
F.R.M.
Integrales
4.20
x ⋅ E[ x ] x < 3
8.- Sea la función: f ( x ) =
x≥3
12
∫
donde E[x] es la parte entera de x. Determinar:
9.- Calcular
x
10.- Calcular:
b)F(x) = ∫
dt
x
1 n
n ∈ N − {0}
t
x
e)F(x) = ∫ sentdt
0
π
0
1
f ) ∫ x 3 e 2 x dx
0
π
π
0
l) ∫ xsenx cos xdx
2
0
0
g) ∫ e x senxdx
π
0
x
1
dt
tn
n ∈ N - {0,1}
2
-x
x ≤1
x >1
1
1
e) ∫ x ⋅ e -x dx
d) ∫ (arccosx)2 dx
-1
n) ∫ E[ x ]dx
0
d)F(x) = ∫
x
1
10
dt
t
g)F(x) = ∫ t ⋅ e - t dt
i) ∫
0
m) ∫ senxcos2xdx
dt
t ln 2 t
x2
dx
0 ex
π
h) ∫ x cos xdx
2
x
2
2
0
x
1
f)F(x) = ∫
11.- Calcular las siguientes integrales definidas:
π
a ) ∫ cos xdx b) ∫ x 2 senxdx c) ∫ e − x senxdx
2
c)F(x) = ∫
2 x
siendo: f ( x ) = 2
x
3
∫ f (x)dx
0
π
f ( x )dx
donde:
dt
0 1+ t2
-x
dt
d) F( x ) = ∫
−x 1 + t 2
a ) F( x ) = ∫
4
1
j)∫
o) ∫
3
2 5
1
1
-1
1
x
2
-1
1- x
2
dx
k) ∫
dx
p) ∫
3
1
0
-2
lnx
dx
x2
4 - x 2 dx
12.- Calcular el área limitada por y = x3, la recta x = -3 y el eje de abscisas.
x2 y2
13.- Demostrar que el área de la elipse 2 + 2 = 1
viene dada por S = π·a·b.
a
b
2
2
14.- Calcular el área limitada por la circunferencia x + y = 4 y la parábola y = x2.
15.- Determinar el área de la región plana delimitada por el eje OX la gráfica de la función f(x) = x2 - 5x + 4 y las rectas
x + 5 = 0, x - 5 = 0.
16.- Determinar el volumen de la figura que engendra la región plana, delimitada por las funciones f(x) = x2 y
g(x) =
x , al girar alrededor del eje OX.
4
17.- Determinar el volumen del sólido de revolución engendrado por la región plana, delimitada por la gráfica de la
función f(x) = 1/x, la recta x = 1 y el eje de abscisas, al girar alrededor del eje OX.
18.- Se considera la circunferencia (x - 3)2 + y2 = 1. Si se hace girar dicha circunferencia alrededor del eje OY determina
un toro (rosquilla). Calcular su volumen.
19.- Determinar el volumen de un sólido de revolución de eje de simetría generado por:
a) La región delimitada por la gráfica de la función f(x) = x2, el eje OY y la recta y - 1 = 0.
b) La región delimitada por la gráfica de la función f(x) = x3, el eje OX y la recta x - 1 = 0.
c)La región delimitada por las gráficas de las funciones f(x) = x2 y g(x) = √x.
e) El círculo delimitado por la circunferencia de centro (-3 , -3) y radio 2,de ecuación: (x + 3)2 + (y + 3)2 = 4
Cuando gira alrededor del eje OX, y cuando lo hace alrededor del eje OY. Así mismo, determinar en cada caso el valor
del área de cada una de las regiones planas descritas en cada uno de los apartados.
19.- Sea f: ℜ → ℜ, la función definida por f(x) = 3x + 6. ¿Tiene alguna primitiva que alcanza el valor 1 para x = 2?.
20.- Calcula el área del recinto limitado por la gráfica de la función f ( x ) = 3 x − 1 y la recta tangente a la misma en
el punto P(2 , 1).
MATEMÁTICAS I
F.R.M.
Integrales
4.21
21.- Sea f : [a , b] → ℜ, una función continua tal que
b
∫ f (x)dx = 0 . Demostrar que existe un punto ξ∈ [a , b] en el
a
que f(ξ) = 0.
22.- Consideremos la región plana delimitada por la gráfica de la función f(x) = arctanx, el eje de ordenadas y la recta
y = 1. Calcular el área de dicha región y el volumen del sólido engendrado al girar la superficie alrededor del eje OY.
23.- Calcular el valor de la siguiente integral:
∫
0
−4
x 4 − ( x + 2) 2 dx .
et
dt . Calcular la ecuación de la recta normal a la gráfica de dicha
1 t
función en el punto de abscisa x = 1. Demostrar, basándose en las propiedades de la integral definida, que si
24.- Consideremos la función f ( x ) = 3 +
g( x ) = 3 +
∫
x
1
∫
x
e t dt , entonces g(x) > f(x) ∀ x > 1.
25.- Calcular el área de la región plana delimitada por la parábola de eje horizontal y2 = x + 2 y la función y = |x|.
26.- Calcula el área del triángulo formado por el eje de ordenadas, y las rectas tangente y normal a la gráfica de la
función f(x) = arctanx, en el punto de abscisa x = 1.
27.- Determinar el volumen engendrado, al girar alrededor del eje OX, la superficie plana delimitada por la gráfica de
la función y = lnx, el eje de abscisas y la recta x = e.
28.- Calcular el valor del parámetro “a”, sabiendo que: lim F( x ) = 1 , siendo F( x ) =
x →∞
∫
x
0
a ⋅ e −3t dt .
29.- Calcular la superficie delimitada por las gráficas de las funciones y = senx, y = cosx y el eje de ordenadas. Así
mismo calcular el volumen engendrado por dicha región plana al girar alrededor del eje OX.
arctanx e t
dt .
30.- Calcular, indicando los teoremas en los que te basas, g’(1), siendo g ( x ) =
1
t
31.- Determinar el volumen engendrado por la superficie delimitada por la función f(x) = e-x, la recta y = e-1 y el eje de
ordenadas; al girar alrededor del eje OY.
∫
32.- Calcula
3
∫ f (x )dx , siendo f(x) = |x + 2|·|x – 2|.
MATEMÁTICAS I
0
F.R.M.