XIX Verano de la Investigación Científica y Tecnológica del Pacífico
Anuncio

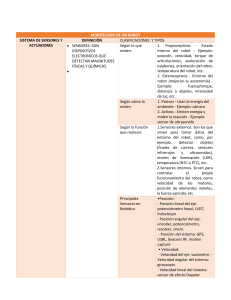
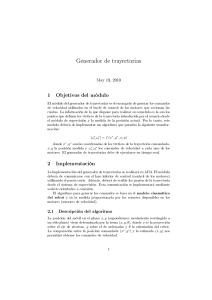
XIX Verano de la Investigación Científica y Tecnológica del Pacífico DISEÑO Y CONSTRUCCIÓN DE UN ROBOT MÓVIL PARA VIGILANCIA CON NAVEGADOR GPS Y VISIÓN ARTIFICIAL Alejandro Monroy Reyes Universidad Autónoma de Ciudad Juárez, [email protected]. Asesor: Andrés Gerardo Fuentes Covarrubias, Universidad de Colima, [email protected] PLANTEAMIENTO DEL PROBLEMA En las últimas décadas, la utilización de sistemas inteligentes ha aumentado de manera considerable incluyendo las tareas de vigilancia y seguridad. Sin embargo, los sistemas de vigilancia tradicionales utilizan dispositivos fijos y requieren de constante supervisión humana que no está exenta de errores y factores como cansancio y tiempos muertos. En esta investigación se propone la implementación de un sistema robótico que contribuya a la vigilancia en un campus escolar, a fin de que las tareas de vigilancia sean más fáciles y efectivas. METODOLOGIA Se comenzó con el diseño del prototipo tomando en cuenta el tamaño de los pasillos exteriores donde navegaría el robot, la altura de las rampas y los materiales disponibles. La segunda etapa del proyecto consistió en la construcción del robot y la ejecución de pruebas de movimiento; se optó por emplear un modelo cinemático de cuatro llantas con tracción en las dos frontales (4W2D). El paso siguiente fue la elaboración del control de posición y velocidad de los motores con el objetivo de darle al robot la capacidad de girar y navegar de manera controlada; para lograrlo se añadieron encoders a los motores y se implementó un algoritmo de control proporcional-integral. Finalmente, se desarrollaron los algoritmos de visión artificial utilizando las librerías de OpenCV para segmentar las áreas de navegación segura y la detección de señales de auxilio. Se empleó una tarjeta pcDuino para recibir las señales de los sensores (encoder, cámara, GPS) y controlar los motores del robot. CONCLUSIONES En este proyecto se aplicaron varias áreas de la ingeniería tales como diseño, electrónica, control, programación y visión artificial para realizar un sistema robótico capaz de cumplir con tareas de vigilancia dentro del campus universitario. Cabe mencionar que el proyecto puede ser ampliamente mejorado agregando diferentes capacidades al robot tales como visión nocturna, reconocimiento de audio, bocinas, entre otros. © Programa Interinstitucional para el Fortalecimiento de la Investigación y el Posgrado del Pacífico Agosto 2014