Las álgebras de división normadas en las teorías supersimetricas
Anuncio

UNIVERSIDAD SIMÓN BOLÍVAR
Decanato de Estudios de Postgrado
Maestrı́a en Matemáticas
TRABAJO DE GRADO
LAS ALGEBRAS DE DIVISION NORMADAS EN
LAS TEORIAS SUPERSIMETRICAS.
por
Jean Pierre Veiro Granados
julio, 2005
UNIVERSIDAD SIMÓN BOLÍVAR
Decanato de Estudios de Postgrado
Maestrı́a en Matemáticas
LAS ALGEBRAS DE DIVISION NORMADAS EN
LAS TEORIAS SUPERSIMETRICAS.
Trabajo de Grado presentado a la Universidad Simón Bolı́var por
Jean Pierre Veiro Granados
Como requisito parcial para optar al grado de
Magister en Matemáticas
Realizado con la tutorı́a del Profesor Alvaro Restuccia
julio, 2005
ii
Resumen
En este trabajo se estudian las álgebras de división normadas y algunos aspectos de su
relevancia en las teorı́as supersimétricas en la fı́sica de altas energı́as. Estas álgebras son
los números reales, R, los números complejos, C, los cuaterniones, H, y los octoniones, O.
En virtud del Teorema de Hurwitz, estas son las únicas álgebras de división normadas. El
proceso de Cayley-Dickson permite construir estas álgebras de forma iterativa.
Las teorı́as supersimétricas sólo se pueden formular en dimensión 3, 4, 6 y 10, que son,
precı́samente, dos dimensiones más que las que poseen R, C, H y O, respectivamente. Esto
nos induce a buscar las relaciones que puedan existir entre las teorı́as supersimétricas y
las álgebras de división normadas.
La primera conexión que mostraremos será expresar las álgebras de Lorentz, para cada
caso, en términos de las álgebras de división normadas. Los casos relacionados con R, C y
H son bien conocidos y se deducen de forma directa. Sin embargo, para los octoniones no
existe una manera inmediata de extender los resultados obtenidos para las otras álgebras
de división normadas. Veremos que, para poder establecer esta última correspondencia,
es necesario usar una construcción mucho más abstracta. Para lograr este objetivo, vincularemos, de manera armoniosa, las álgebras de división normadas con las álgebras de
Lie y las álgebras de Jordan.
La segunda relación será encontrar una manera de escribir tanto la acción como las ecuaciones de Maxwell y Yang-Mills en dimensión diez usando octoniones. Veremos cómo la
no asociatividad de los octoniones juega un papel importante en el logro de este objetivo.
Palabras clave: álgebras de división normadas, Proceso de Cayley-Dickson, Teorema de
Hurwitz, álgebras de Lorentz, Ecuaciones de Maxwell y de Yang-Mills.
iii
Índice General
Resumen
ii
Introducción
1
I
Las Algebras de División Normadas
I.1 Construcción de las Algebras de División Normadas . .
I.1.1 Los números reales, R . . . . . . . . . . . . . .
I.1.2 Los números complejos, C . . . . . . . . . . . .
I.1.3 Los cuaterniones, H . . . . . . . . . . . . . . . .
I.1.4 Los octoniones, O . . . . . . . . . . . . . . . . .
I.2 La construcción de Cayley-Dickson . . . . . . . . . . .
I.2.1 Forma matricial del proceso de Cayley-Dickson
I.3 El Teorema de Hurwitz . . . . . . . . . . . . . . . . . .
I.4 Grupos de Automorfismos . . . . . . . . . . . . . . . .
II El isomorfismo entre sl(2, Kn ) y so(1, n + 1) para
II.1 El isomorfismo sl(2, R) ∼
= so(1, 2). . . . . . . . .
∼
II.2 El isomorfismo sl(2, C) = so(1, 3). . . . . . . . .
II.3 El isomorfismo sl(2, H) ∼
= so(1, 5). . . . . . . . .
∼
II.4 El isomorfismo sl(2, O) = so(1, 9). . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
n = 1, 2, 4
. . . . . .
. . . . . .
. . . . . .
. . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
y8
. . .
. . .
. . .
. . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
4
4
7
14
21
26
31
35
.
.
.
.
41
47
48
53
58
III Aplicaciones a la Teorı́a de Calibre
71
III.1 La Acción de Maxwell y las Ecuaciones de Movimiento . . . . . . . . . . . 72
III.2 Las Ecuaciones de Yang-Mills . . . . . . . . . . . . . . . . . . . . . . . . . 76
Conclusión
90
Referencias Bibliográficas
91
1
Introducción
A mediados del siglo XIX se descubrieron los cuaterniones y, brevemente después, los
octoniones. De los cuaterniones se sabe que fueron descubiertos por William Hamilton,
debido al famoso grabado en el puente de Brougham. El descubrimiento de los octoniones
se debate entre John Graves y Arthur Cayley. Hamilton afirma que, su amigo, John Graves
descubrió los octoniones apenas unos meses después del descubrimiento de los cuaterniones. Sin embargo, los octoniones aparecen por primera vez en una publicación de Cayley.
Los octoniones, a diferencia de los cuaterniones, fueron olvidados hasta principios del
siglo XX cuando Élie Cartan publicó un artı́culo clasificando los grupos de Lie reales y
simples. En esta clasificación, uno de los grupos de Lie es el grupo de automorfismos de
los octoniones.
Los cuaterniones pasaron al olvido con el surgimiento del cálculo vectorial, y notaciones
como el producto punto y el producto cruz, pero los octoniones nunca obtuvieron una
fama comparable. No fue sino hasta la década de los ochenta, con la aparición de las
teorı́as supersimétricas en la fı́sica, que los octoniones han adquirido importancia.
Las teorı́as supersimétricas sólo son consistentes en dimensión 3, 4, 6 y 10. Por otro
lado, los números reales (R), los complejos (C), los cuaterniones (H) y los octoniones
(O) tienen exactamente dos dimensiones menos, respectivamente. Notemos que hay una
correspondencia dimensional. Además, el Teorema de Hurwitz nos dice que R, C, H, y O
son las únicas álgebras de división normadas. Estas dos cualidades nos hace pensar que
hay una relación estrecha entre la formulación de teorı́as supersimétricas consistentes y
las álgebras de divisón normadas.
2
Más aún, existen isomorfismos entre las álgebras de Lorentz, asociadas a cada caso dimensional de las teorı́as supersimétricas, y unas álgebras de Lie construidas sobre las álgebras
de división normadas. Estos isomorfismos son
so(1, 2) ∼
= sl(2, R)
so(1, 3) ∼
= sl(2, C)
so(1, 5) ∼
= sl(2, H)
so(1, 9) ∼
= sl(2, O)
El último de estos isomorfismos es el más interesante, ya que la definición de sl(2, O) no
es una generalización trivial de los otros casos.
Este trabajo está estructurado de la siguiente manera. El primer capı́tulo trata sobre las
álgebras de división normadas. Se construirán estas álgebras. Luego, se mostrará el proceso de Cayley-Dickson el cual permite construir a estas álgebras una dentro de otra y
de forma iterativa. Haciendo uso del proceso de Cayley-Dickson probaremos el Teorema
de Hurwitz. Por último, se dará una descripción de los grupos de automorfismos de las
álgebras de división normadas.
En el segundo capı́tulo se exhibirán los isomorfismos entre las álgebras de Lorentz
so(1, n + 1) y el álgebra de Lie sl(2, Kn ), donde Kn denota el álgebra de división normada de dimensión n.
Finalmente, en el tercer capı́tulo escribiremos las ecuaciones de Maxwell y las de YangMills en términos de octoniones, para el caso de dimensión diez. Las teorı́as de Maxwell y
de Yang-Mills, junto con la teorı́a de Relatividad general, permiten describir todas las fuerzas fundamentales que existen en la naturaleza. La teorı́a de Super-Yang-Mills es la base
para la teorı́a de Supercuerdas, la cual tiene todavı́a muchos aspectos a ser entendidos.
Creemos que la formulación en términos de octoniones permitirı́a una mejor descripción
de la teorı́a. En este trabajo damos los primeros pasos en esa dirección.
3
Capı́tulo I
Las Algebras de División Normadas
Este capı́tulo está dedicado a las álgebras de división normadas sobre los números reales.
En virtud del Teorema de Hurwitz, ellas son los números reales, R, lo números complejos,
C, los cuaterniones, H, y los octoniones, O. Se mostrará el proceso de Cayley–Dickson, el
cual permite generar estas álgebras, y toda una familia de álgebras, de forma consecutiva.
También se exhibirá una representación matricial del proceso de Cayley–Dickson. Por
último, se estudiará al grupo de automorfismos de cada una de la álgebras de división
normadas.
I.1
Construcción de las Algebras de División Normadas
Definimos un álgebra por un espacio vectorial sobre los números reales, V , dotado con un
mapa bilineal m : V × V → V y un elemento no nulo 1 ∈ V tal que m(1, x) = m(x, 1) = x
para todo x en V . Al mapa m le llamaremos la operación de multiplicación en el álgebra
V y generalmente abreviaremos la notacion por m(x, y) = xy.
Llamaremos un álgebra de división a un álgebra sin divisores del cero. Es decir, si V es
un álgebra de división y x, y ∈ V entonces xy = 0 implica que alguno de los dos debe ser
igual a cero. Un álgebra de división normada es un álgebra que también es un espacio
vectorial normado tal que la norma permite composición. Es decir, si V es un álgebra de
división normada y x, y ∈ V entonces se tiene que kxyk = kxk kyk. Notese que si V es un
álgebra de división normada entonces también es un álgebra de división ya que si xy = 0
4
se tiene que 0 = k0k = kxyk = kxk kyk lo cual implica que x = 0 o y = 0, pues kvk = 0
si, y sólo si, v = 0 para todo v ∈ V por ser k · k una norma.
Procedemos, en lo que sigue de esta sección, a dar una descripción de cada una de las
álgebras de división normadas.
I.1.1
Los números reales, R
Los números reales, R, son un álgebra de división normada, de dimensión uno, tomando la
norma como la función valor absoluto y las operaciones usuales de suma y multiplicación
de los números reales. Señalamos que la multiplicación de los números reales es tanto
asociativa como conmutativa.
I.1.2
Los números complejos, C
Los números complejos, C, los consideramos como un espacio vectorial, de dimensión
dos sobre los reales, con base {1, i} tal que i2 = i i = −1. La suma de dos números
complejos y la multiplicación de un número complejo por un escalar se define componente
a componente. Dados dos números complejos, z1 = a1 + bi y z2 = c1 + di, definimos su
producto mediante la multiplicación usual de números complejos. Ası́,
m(z1 , z2 ) = (ac − db)1 + (ad + cb)i
el cual resulta un mapa bilineal pues si tenemos otro número complejo z3 = e1 + f i y un
número real λ, entonces
m(λz1 + z3 , z2 ) = ((λa + e)c − d(λb + f ))1 + ((λa + e)d + c(λb + f ))i
= ((λa)c + ec − d(λb) − df )1 + ((λa)d + ed + c(λb) + cf )i
= (λ(ac − db) + (ec − df ))1 + (λ(ad + cb) + (ed + cf ))i
= λ((ac − db)1 + (ad + cb)i) + (ec − df )1 + (ed + cf )i
= λ m(z1 + z2 ) + m(z3 , z2 )
5
y de manera análoga
m(z1 , λz2 + z3 ) = λ m(z1 + z2 ) + m(z1 , z3 )
Esta multiplicación es conmutativa y asociativa. En efecto,
m(z1 , z2 ) = (ac − db)1 + (ad + cb)i
= (ca − bd)1 + (da + bc)i
= m(z2 , z1 )
por lo que es conmutativa, y
z1 (z2 z3 ) = (a1 + bi) ((ce − f d)1 + (cf + ed)i)
= (a(ce − f d) − (cf + ed)b)1 + (a(cf + ed) + (ce − f d)b)i
= (ace − af d − cf b − edb)1 + (acf + aed + ceb − f db)i
= (ace − dbe − f ad − f cb)1 + (acf − dbf + ead + ecb)i
= ((ac − db)e − f (ad + cb))1 + ((ac − db)f + e(ad + cb))i
= ((ac − db)1 + (ad + cb)i) (e1 + f i)
= (z1 z2 )z3
por lo que es asociativa. Además, 1 = 1 + 0i ∈ C es tal que m(1, z1 ) = m(z1 , 1) = z1 para
cualquier z1 ∈ C. Es decir, el elemento 1 es una unidad en C. Dado un número complejo
z = x1 + yi, definimos su conjugado por z̄ = x1 − yi ∈ C. Esto nos permite descomponer
a z de la siguiente forma.
z + z̄ z − z̄
+
2
2
la parte real de z y a Im(z) =
z=
Llamamos a Re(z) =
z+z̄
2
z−z̄
2
la parte imaginaria de z.
Notemos que, para un escalar λ, se tiene
λz = ((λ x)1 + (λ y)i) = (λ x)1 − (λ y)i = λ z̄
Podemos dar una norma, k k, en C de la siguiente manera
kzk2 = z z̄
= x2 + y 2
6
Una propiedad que usaremos para probar la desigualdad triangular, más adelante, es que
las normas de un número complejo y de su conjugado son iguales. En efecto,
√
√
kzk = z z̄ = z̄z = kz̄k
El conjugado de un producto es igual al producto de los conjugados,
z1 z2 = (ac − db)1 + (ad + cb)i
= (ac − db)1 − (ad + cb)i
= (ca − bd)1 + (a(−d) + c(−b))i
= (ca − (−b)(−d))1 + (c(−b) + a(−d))i
= z¯2 z¯1
y el conjugado de una suma es igual a la suma de los conjugados,
z1 + z2 = (a + c)1 + (b + d)i
= (a + c)1 − (b + d)i
= (a + c)1 + ((−b) + (−d))i
= z¯1 + z¯2
Es fácil ver que k k es, en efecto, una norma para los números complejos. Veamos que
k k satisface las condiciones que debe cumplir una norma.
q
√
√
• kλ zk = (λ z)(λ z) = λ z λ z̄ = |λ| z z̄ = |λ| kzk
• kzk =
√
z z̄ =
p
x2 + y 2 ≥ 0 y
kzk = 0 ⇐⇒ x2 + y 2 = 0 ⇐⇒ x = 0 = y ⇐⇒ z = 0
Esto último implica que k k permite composición ya que
kz1 z2 k2 = z1 z2 z1 z2
= z1 z2 z¯2 z¯1
= z1 kz2 k2 z¯1
= kz2 k2 z1 z¯1
= kz2 k2 kz1 k2
7
y como k · k ≥ 0 entonces se tiene
kz1 z2 k = kz1 k kz2 k
Sólo nos falta la desigualdad triangular para ver que k k es una norma. Pero,
kz1 + z2 k2 = (z1 + z2 )(z1 + z2 )
= (z1 + z2 )(z¯1 + z¯2 )
= z1 z¯1 + z2 z¯2 + z2 z¯1 + z1 z¯2
= kz1 k2 + kz2 k2 + 2(ac + db)
p
≤ kz1 k2 + kz2 k2 + 2 (ac + db)2
p
≤ kz1 k2 + kz2 k2 + 2 (ac − (−d)b)2 + (a(−d) + cb)2
= kz1 k2 + kz2 k2 + 2kz1 z¯2 k
= kz1 k2 + kz2 k2 + 2kz1 k kz2 k
= (kz1 k + kz2 k)2
y nuevamente, como k · k ≥ 0, se tiene la desigualdad deseada
kz1 + z2 k ≤ kz1 k + kz2 k
Hemos probado, entonces, que los números complejos, C, son un álgebra y un espacio
vectorial normado con una norma que permite composición. Por lo tanto, C es un álgebra
de división normada.
I.1.3
Los cuaterniones, H
Los cuaterniones, H, son un espacio vectorial, de dimensión cuatro, sobre los reales, con
base {1, i, j, k} tal que i2 = j 2 = k 2 = −1 e ijk = −1. Se puede establecer la siguiente
tabla multiplicativa para los elementos de la base.
8
1 i
1 1 i
i i -1
j j -k
k k j
j k
j k
k -j
-1 i
-i -1
Tabla I.1: Tabla multiplicativa para los elementos de la base de H.
Donde la multiplicación es siempre el elemento que aparece en la primera columna por el
elemento que aparece en la primera fila, en ese orden. Los productos de dos elementos de
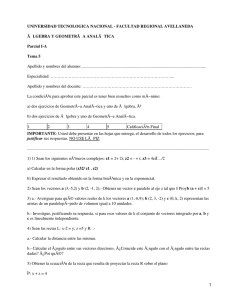
la base, distintos entre si y del 1, se pueden representar en la siguiente figura.
i
k
j
Figura I.1: Representación gráfica de una parte de la tabla I.1.
Donde la multiplicación de un elemento con otro da el siguiente elemento siguiendo el
cı́rculo, y la orientación de las flechas indican el signo que acompaña el resultado. Por
ejemplo, si hacemos la multiplicación ik obtenemos −j pues j es el siguiente elemento
después de k y estamos recorriendo la orientación de las flechas en sentido contrario, por
lo que lleva el signo menos.
La suma de dos cuaterniones y la multiplicación de un cuaternión por un escalar se definen
componente a componente. La multiplicación de dos cuaterniones se define tomando en
cuenta la propiedad distributiva del producto respecto de la suma y las reglas de multiplicación entre los elementos de la base (ver tabla I.1). Es decir, dados dos cuaterniones,
q1 = t1 1 + x1 i + y1 j + z1 k y q2 = t2 1 + x2 i + y2 j + z2 k, su producto se puede expresar de
9
la siguiente forma.
m(q1 , q2 ) = (t1 1 + x1 i + y1 j + z1 k)(t2 1 + x2 i + y2 j + z2 k)
= (t1 t2 )11 + (t1 x2 )1i + (t1 y2 )1j + (t1 z2 )1k
+(x1 t2 )i1 + (x1 x2 )ii + (x1 y2 )ij + (x1 z2 )ik
+(y1 t2 )j1 + (y1 x2 )ji + (y1 y2 )jj + (y1 z2 )jk
+(z1 t2 )k1 + (z1 x2 )ki + (z1 y2 )kj + (z1 z2 )kk
= (t1 t2 )1 + (t1 x2 )i + (t1 y2 )j + (t1 z2 )k
+(x1 t2 )i − (x1 x2 )1 + (x1 y2 )k − (x1 z2 )j
+(y1 t2 )j − (y1 x2 )k − (y1 y2 )1 + (y1 z2 )i
+(z1 t2 )k + (z1 x2 )j − (z1 y2 )i − (z1 z2 )1
= (t1 t2 − x1 x2 − y1 y2 − z1 z2 )1 + (t1 x2 + x1 t2 + y1 z2 − z1 y2 )i
(I.1)
+(t1 y2 − x1 z2 + y1 t2 + z1 x2 )j + (t1 z2 + x1 y2 − y1 x2 + z1 t2 )k
Este producto es un mapa bilineal. Para verificar que, en efecto, es un mapa bilineal, sean
q3 = t3 1 + xi + y3 j + z3 k otro cuaternión y λ un número real. Luego,
((λt1 + t2 )1 + (λx1 + x2 )i + (λy1 + y2 )j + (λz1 + z2 )k)
m(λq1 + q2 , q3 ) =
(t3 1 + x3 i + y3 j + z3 k)
= ((λt1 + t2 )t3 − (λx1 + x2 )x3 − (λy1 + y2 )y3 − (λz1 + z2 )z3 )1
+((λt1 + t2 )x3 + (λx1 + x2 )t3 + (λy1 + y2 )z3 − (λz1 + z2 )y3 )i
+((λt1 + t2 )y3 − (λx1 + x2 )z3 + (λy1 + y2 )t3 + (λz1 + z2 )x3 )j
+((λt1 + t2 )z3 + (λx1 + x2 )y3 − (λy1 + y2 )x3 + (λz1 + z2 )t3 )k
(t1 t3 − x1 x3 − y1 y3 − z1 z3 )1 + (t1 x3 + x1 t3 + y1 z3 − z1 y3 )i
!
= λ
+(t1 y3 − x1 z3 + y1 t3 + z1 x3 )j + t1 z3 + x1 y3 − y1 x3 + z1 t3 )k
(t2 t3 − x2 x3 − y2 y3 − z2 z3 )1 + (t2 x3 + x2 t3 + y2 z3 − z2 y3 )i
+
+(t2 y3 − x2 z3 + y2 t3 + z2 x3 )j + t2 z3 + x2 y3 − y2 x3 + z2 t3 )k
= λ m(q1 , q3 ) + m(q2 , q3 )
!
10
y de manera análoga
m(q1 , λq2 + q3 ) = λ m(q1 , q2 ) + m(q1 , q3 )
Además, sustituyendo en la ecuación (I.1) se verifica que, el cuaternión 1 = 1+0i+0j +0k
es tal que m(1, q1 ) = m(q1 , 1) = q1 para cualquier q1 ∈ H. Por lo que el elemento 1 es una
unidad en H.
Deseamos investigar si este producto es asociativo. Podemos usar la ecuación (I.1) para
responder esta pregunta pero preferimos tomar un desvı́o menos tedioso. Dado un cuaternión q = t1 + xi + yj + zk, le asociamos la siguiente matriz.
t −x −y −z
x t −z y
y z
t −x
z −y x
t
Dadas dos matrices de este tipo,
t1 −x1 −y1 −z1
x1 t1 −z1 y1
Q1 =
y1 z1
t1 −x1
z1 −y1 x1
t1
(I.2)
y
t2 −x2 −y2 −z2
x2 t2 −z2 y2
Q2 =
y2 z2
t2 −x2
z2 −y2 x2
t2
asociadas a los cuaterniones q1 y q2 , respectivamente, su producto da
t̃ −x̃ −ỹ −z̃
x̃ t̃ −z̃ ỹ
Q1 Q2 =
ỹ z̃
t̃ −x̃
z̃ −ỹ x̃
t̃
donde
t̃ = t1 t2 − x1 x2 − y1 y2 − z1 z2
x̃ = t1 x2 + x1 t2 + y1 z2 − z1 y2
ỹ = t1 y2 − x1 z2 + y1 t2 + z1 x2
z̃ = t1 z2 + x1 y2 − y1 x2 + z1 t2
11
Ası́, el producto matricial Q1 Q2 está asociado al producto cuaterniónico m(q1 , q2 ). Por
lo tanto, (I.2) es una representación matricial de los cuaterniones. Notemos que el 1 ∈ H
está asociado a la matriz identidad. Como el producto de matrices es asociativo, tenemos
entonces que la multiplicación dada, m, de cuaterniones también es asociativa. Sin embargo, el producto de cuaterniones no es conmutativo. Esto se puede ver intercambiando
los ı́ndices en la ecuación (I.1) y observando que el resultado no necesariamente es igual
al anterior. La no conmutatividad de los cuaterniones es consecuencia de la tabla multiplicativa para los elementos de la base (ver tabla I.1) ya que, por ejemplo, m(i, j) = k
pero m(j, i) = −k.
Dada un álgebra, V , introducimos un mapa bilineal y antisimétrico, [ , ] : V × V → V ,
llamado conmutador, definido por
[a, b] = ab − ba
para todo a, b ∈ V . Si V es el álgebra de los números reales o de los números complejos entonces el conmutador siempre es cero. Sin embargo, como los cuaterniones no son
conmutativos, este mapa empieza a tomar importancia en el estudio de las álgebras de
división normadas. El conmutador nos da una especie de medida de conmutatividad, ya
que [a, b] = 0 si, y sólo si, a y b conmutan. El conmutador es, en efecto, bilineal pues si c
es otro elemento en V y λ es un escalar, entonces
[λ a + b, c] = (λ a + b)c − c(λ a + b)
= λ ac + bc − λ ca − cb
= λ [a, c] + [b, c]
y de manera similar
[a, λ b + c] = λ [a, b] + [a, c]
Por otro lado,
[a, b] = ab − ba = −(ba − ab) = −[b, a]
12
lo cual demuestra que el conmutador es antisimétrico.
Dado un cuaternión q = t1 + xi + yj + zk, definimos, de manera análoga a como se hizo
para los números complejos, su conjugado por q̄ = t1 − xi − yj − zk ∈ H. Podemos
descomponer a q como sigue.
q=
Llamamos a Re(q) =
q+q̄
2
q + q̄ q − q̄
+
2
2
la parte real de q y a Im(q) =
q−q̄
2
la parte imaginaria de q. Si
λ es un escalar, se tiene que
λq = ((λ t)1 + (λ x)i + (λ y)j + (λ z)k) = (λ t)1 − (λ x)i − (λ y)j − (λ z)k = λ q̄
La misma prueba dada para el caso de los números complejos, pero ahora con dos términos
más, sirve para probar que el conjugado de la suma de dos cuaterniones es igual a la suma
de sus conjugados. Es decir,
q1 + q2 = q¯1 + q¯2
para cualesquiera dos cuaterniones q1 y q2 . Sin embargo, el cálculo usado para probar
que el conjugado de un producto de dos números complejos es igual al producto de sus
conjugados no se extiende de un modo directo para los cuaterniones. Se puede probar,
mediante una cuenta larga y tediosa, que el conjugado de un producto de cuaterniones
es igual al producto permutado de los conjugados de cada cuaternión. Una manera más
sencilla de obtener este resultado es acudiendo a la representación matricial (I.2). Este
tipo de matrices representa la conjugación de un cuaternión mediante transposición. Es
decir, si la matriz Q está asociada al cuaternión q, entonces su transpuesta, QT , es la
matriz asociada a q̄. Ası́,
q1 q2 = q¯2 q¯1
simplemente porque (Q1 Q2 )T = Q2 T Q1 T , donde las matrices Q1 y Q2 están asociadas a
los cuaterniones q1 y q2 , respectivamente.
13
Como (q1 + q¯1 ) y (q2 + q¯2 ) son reales, tenemos que
0 = (q1 + q¯1 )q2 − q2 (q1 + q¯1 )
= q1 q2 + q¯1 q2 − q2 q1 − q2 q¯1
= [q1 , q2 ] + [q¯1 , q2 ]
y también,
0 = q¯1 (q2 + q¯2 ) − (q2 + q¯2 )q¯1
= q¯1 q2 + q¯1 q¯2 − q2 q¯1 − q¯2 q¯1
= q¯1 q2 − q2 q¯1 − q1 q2 − q2 q1
= [q¯1 , q2 ] − [q1 , q2 ]
Por lo que contamos con la siguiente identidad,
[q¯1 , q2 ] = −[q1 , q2 ] = [q1 , q2 ]
(I.3)
de la cual se deduce que el conmutador de dos cuaterniones siempre tiene parte real igual
a cero.
Seguimos escribiendo q = t1 + xi + yj + zk, y damos una norma, k · k, en H por
kqk2 = q q̄
= x2 + t2 + y 2 + z 2
A pesar que los cuaterniones, en general, no son conmutativos se tiene, al igual que para
los números complejos, que q q̄ = q̄ q, lo cual implica que kqk = kq̄k. Para probar que
k · k es, de hecho, una norma que, además, permite composición se repiten los mismos
argumentos usados para el caso de los números complejos. Sólo es necesario hacer dos
observaciones. La primera, es que los escalares conmutan con cualquier cuaternión y, la
segunda observación involucrada con la prueba de la desigualdad triangular, es
2kq1 q2 k = 2kq1 k kq2 k = kq1 k kq2 k + kq2 k kq1 k
14
para cualesquiera dos cuaterniones q1 y q2 , ya que la norma le asigna a cada elemento del
espacio vectorial un escalar1 .
Hemos probado, entonces, que los cuaterniones, H, son un álgebra y un espacio vectorial normado con una norma que permite composición. Ası́, H es un álgebra de división
normada.
I.1.4
Los octoniones, O
Debido a su elegancia, hemos escogido la construcción que nos exhibe John Baez en su
trabajo titulado The Octonions, ver [1]. Los octoniones, O, son un espacio vectorial, de
dimensión ocho, sobre los reales, con base {1, e1 , e2 , e3 , e4 , e5 , e6 , e7 } tal que
• e2i = −1 para i = 1, . . . , 7
(
ei+1 ej+1 = ek+1
• si ei ej = ek , entonces
e2i e2j = e2k
Indicando algún producto, digamos e1 e2 = e4 , se obtiene la siguiente tabla multiplicativa
para los elementos de la base de los octoniones.
1
e1
e2
e3
e4
e5
e6
e7
1
1
e1
e2
e3
e4
e5
e6
e7
e1
e1
−1
−e4
−e7
e2
−e6
e5
e3
e2
e2
e4
−1
−e5
−e1
e3
−e7
e6
e3
e3
e7
e5
−1
−e6
−e2
e4
−e1
e4
e4
−e2
e1
e6
−1
−e7
−e3
e5
e5
e5
e6
−e3
e2
e7
−1
−e1
−e4
e5
e6
−e5
e7
−e4
e3
e1
−1
−e2
e7
e7
−e3
−e6
e1
−e5
e4
e2
−1
Tabla I.2: Tabla multiplicativa para los elementos de la base de O.
Aquı́ la multiplicación es siempre el elemento que aparece en la primera columna por el
elemento que aparece en la primera fila, en ese orden. Esta tabla multiplicativa no permite
1
Recordemos que en todo este trabajo los escalares serán, salvo que se indique lo contrario, números
reales.
15
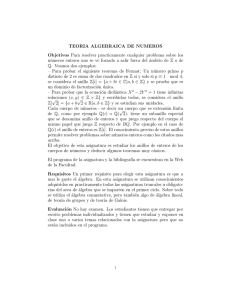
comprender, fácilmente, la geometrı́a de los octoniones. Por ello, de manera análoga a los
cuaterniones, representamos la multiplicación de los elementos de la base, distintos entre
si y del 1, en la siguiente figura.
e5
e1
e6
e7
e4
e2
e3
Figura I.2: Representación gráfica de la tabla I.2.
Cada linea representa la parte imaginaria de un subespacio cuaterniónico. Es decir, sobre
cada linea la regla de multiplicación viene dada de manera análoga a la de la figura I.1,
por ejemplo, e4 e6 = e3 y e7 e3 = −e1 . La figura I.2 se llama el plano de Fano.
La suma de dos octoniones y la multiplicación por un escalar se definen componente a
componente. La multiplicación de dos octoniones se define, de forma análoga al caso de
los cuaterniones, escribiendo cada octonión como combinación lineal de los elementos de
la base y usando la propiedad distributiva del producto respecto de la suma. Esta multiplicación no es conmutativa ya que, por ejemplo, ei ej = −ej ei para cualesquiera par de
ı́ndices distintos, i y j.
La multiplicación de octoniones, de acuerdo a como se ha definido, es un mapa bilineal.
Se puede construir una fórmula para esta multiplicación de un modo similar a la ecuación (I.1), pero con los ocho elementos de la base para los octoniones, y verificar que
16
se obtiene un mapa bilineal. En efecto, si x = a0 1 +
P7
i=1
ai ei e y = b0 1 +
P7
i=1 bi ei
son dos octoniones entonces, definimos un mapa m : O × O → O, mediante la siguiente
ecuación.
m(x, y) =
a0 1 +
7
X
i=1
!
ai ei
b0 1 +
7
X
!
bi ei
i=1
= (a0 b0 − a1 b1 − a2 b2 − a3 b3 − a4 b4 − a5 b5 − a6 b6 − a7 b7 )1
+(a0 b1 + a1 b0 + a2 b4 + a3 b7 − a4 b2 + a5 b6 − a6 b5 − a7 b3 )e1
+(a0 b2 − a1 b4 + a2 b0 + a3 b5 − a4 b1 − a5 b3 + a6 b7 − a7 b6 )e2
+(a0 b3 − a1 b7 − a2 b5 + a3 b0 + a4 b6 + a5 b2 − a6 b4 + a7 b1 )e3
+(a0 b4 + a1 b2 − a2 b1 − a3 b6 + a4 b0 + a5 b7 + a6 b3 − a7 b5 )e4
(I.4)
+(a0 b5 − a1 b6 + a2 b3 − a3 b2 − a4 b7 + a5 b0 + a6 b1 + a7 b4 )e5
+(a0 b6 + a1 b5 − a2 b7 + a3 b4 − a4 b3 − a5 b1 + a6 b0 + a7 b2 )e6
+(a0 b7 + a1 b3 + a2 b6 − a3 b1 + a4 b5 − a5 b4 − a6 b2 + a7 b0 )e7
Entonces, como consecuencia de la propiedad distributiva del producto respecto de la
suma, se tiene que la multiplicación de octoniones es un mapa bilineal. Además, el octonión
1 = 1 + 0e1 + 0e2 + 0e3 + 0e4 + 0e5 + 0e6 + 0e7 es tal que m(1, x) = m(x, 1) = x para
cualquier x ∈ O.
Otra propiedad, menos obvia que las anteriores, es que la multiplicación de octoniones no
es asociativa. Por ejemplo, (e1 e2 )e6 = e3 mientras que e1 (e2 e6 ) = −e3 .
Dada un álgebra, V , introducimos un mapa trilineal, [ , , ] : V × V × V → V , llamado
asociador, definido por
[a, b, c] = (ab)c − a(bc)
(I.5)
para todo a, b, c ∈ V . Si V es alguna de las álgebras anteriores, R, C o H, entonces el
asociador siempre es cero. Sin embargo, como los octoniones no son asociativos, este mapa
empieza a tener relevancia en el estudio de las álgebras de división normadas. El asociador
17
nos da una especie de medida de asociatividad, ya que él se anula para cualquier trı́ada
de elementos en un álgebra si, y sólo si, el álgebra generada por esa trı́ada de elementos
es asociativa. La trilinealidad del asociador es consecuencia de la propiedad distributiva
del producto respecto de la suma y del hecho que los escalares conmutan con todos los
elementos del álgebra.
Los octoniones, a pesar de no ser asociativos, sı́ satisfacen una condición más débil, llamada
alternatividad. Se dice que un álgebra, V , es alternativa si
(a a)b = a(a b)
y
b(a a) = (b a)a
para todo a, b ∈ V . Para ver que los octoniones son alternativos, basta verificar las dos
igualdades anteriores para cualesquiera par de octoniones. Esta cuenta es de, por lo menos, siete veces la magnitud de la ecuación (I.4). Sin embargo, en el libro editado por
William E. Baylis, (ver [2]), la publicación de Rafal Ablamowicz titulada Clifford Algebra
Computations with Maple explica cómo se puede usar el programa Maple para verificar
esta cuenta. Después de instalar el paquete llamado Clifford, el siguiente código
> with(Clifford);
with(Octonion);
> specify_constants(a0,a1,a2,a3,a4,a5,a6,a7,b0,b1,b2,b3,b4,b5,b6,b7);
> x:=a0*Id+a1*e1+a2*e2+a3*e3+a4*e4+a5*e5+a6*e6+a7*e7;
y:=b0*Id+b1*e1+b2*e2+b3*e3+b4*e4+b5*e5+b6*e6+b7*e7;
> xx:=clicollect(x &o x);
xy:=clicollect(x &o y);
yx:=clicollect(y &o x);
> simplify(xx &o y - x &o xy);
simplify(y &o xx - yx &o x);
demuestra que los octoniones son alternativos, ya que el resultado de las dos últimas
simplicaciones es cero.
18
Las condiciones para que un álgebra sea alternativa se pueden formular en términos del
asociador.
(a a)b = a(a b) ←→ [a, a, b] = 0
b(a a) = (b a)a ←→ [b, a, a] = 0
Más aún, el asociador resulta alternante si el álgebra es alternativa.2 Es decir, si V es un
álgebra alternativa y a1 , a2 , a3 ∈ V entonces
aσ(1) , aσ(2) , aσ(3) = (sgn σ) [a1 , a2 , a3 ]
donde sgn σ es el signo de la permutación σ de tres letras. En efecto, las siguientes
igualdades
0 = [a + b, a + b, c]
= [a, a, c] + [a, b, c] + [b, a, c] + [b, b, c]
= [a, b, c] + [b, a, c]
0 = [b, a + c, a + c]
= [b, a, a] + [b, a, c] + [b, c, a] + [b, c, c]
= [b, a, c] + [b, c, a]
valen si estamos en presencia de un álgebra alternativa y demuestran que
[a, b, c] = −[b, a, c] = [b, c, a]
lo cual es suficiente para demostrar que el asociador es alternante.
En el libro de R. Schafer (ver [3] en la página 29) encontramos un teorema de E. Artin
2
Un álgebra, de caracterı́stica distinta de dos, es alternativa si, y sólo si, el asociador es alternante. Este
resultado se puede encontrar en el libro de R. Schafer, An introduction to nonassociative algebras, ver [3].
Sin embargo, siempre estaremos considerando álgebras sobre los números reales que son de caracterı́stica
cero.
19
el cual dice que la subálgebra generada por cualesquiera dos elementos de un álgebra
alternativa es asociativa.
P
P
Dado el octonión x = a0 1+ 7i=1 ai ei , definimos su conjugado por x̄ = a0 1− 7i=1 ai ei ∈ O.
P
Si y = b0 1 + 7i=1 bi ei es otro octonión y λ es un número real, tenemos, de forma análoga
al caso de los cuaterniones, que
x + y = x̄ + ȳ
y también,
λx = λx̄
Lo que no es tan obvio es que xy = ȳx̄. Esto se puede verificar, al igual que como se hizo
para probar la alternatividad de los octoniones, mediante el siguiente código implementado
en Maple.
> with(Clifford);
with(Octonion);
> specify_constants(a0,a1,a2,a3,a4,a5,a6,a7,b0,b1,b2,b3,b4,b5,b6,b7);
> x:=a0*Id+a1*e1+a2*e2+a3*e3+a4*e4+a5*e5+a6*e6+a7*e7;
y:=b0*Id+b1*e1+b2*e2+b3*e3+b4*e4+b5*e5+b6*e6+b7*e7;
> xy:=clicollect(x &o y);
> simplify(o_conjug(xy) - o_conjug(y) &o o_conjug(x));
El resultado de la simplificación al final del código es cero, lo cual implica que xy − ȳx̄ = 0.
Ası́, se obtiene que
xy = ȳx̄.
El octonión x se puede descomponer de la siguiente forma
x=
x + x̄ x − x̄
+
2
2
20
Llamamos, de igual manera que para las dos álgebras de división anteriores, a Re(x) =
la parte real de x y a Im(x) =
x−x̄
2
x+x̄
2
la parte imaginaria de x.
La ecuación (I.3) también es válida para los octoniones. Es decir,
[x̄, y] = −[x, y] = [x, y]
para cualesquiera dos octoniones x e y. Más aún, si z es otro octonión tenemos un resultado
análogo para el asociador,
[x̄, y, z] = −[x, y, z] = [x, y, z]
(I.6)
Para probar esto hacemos uso de una ecuación que expresa el asociador en términos
de conmutadores, que se ha encontrado en una publicación de J. Schray y C. Manogue
(ver [4]). Esta relación es,
6[x, y, z] = [x, [y, z]] + [y, [z, x]] + [z, [x, y]]
En efecto,
[x, [y, z]] + [y, [z, x]] + [z, [x, y]] = x(yz) − x(zy) − (yz)x + (zy)x
+y(zx) − y(xz) − (zx)y + (xz)y
+z(xy) − z(yx) − (xy)z + (yx)z
= [x, y, z] + [y, z, x] + [z, x, y]
−[z, y, x] − [x, z, y] − [y, x, z]
= 6[x, y, z]
Se tiene entonces que
6[x̄, y, z] = [x̄, [y, z]] + [y, [z, x̄]] + [z, [x̄, y]]
= − [x, [y, z]] + [y, −[z, x]] + [z, −[x, y]]
= − [x, [y, z]] − [y, [z, x]] − [z, [x, y]]
= −6[x, y, z]
21
y también
6[x, y, z] = [x, [y, z]] + [y, [z, x]] + [z, [x, y]]
= − [x, [y, z]] − [y, [z, x]] − [z, [x, y]]
= −6[x, y, z]
lo que demuestra la ecuación (I.6).
Se define una norma, k · k, para los octoniones dada por
kxk2 = x x̄
= a20 + a21 + a22 + a23 + a24 + a25 + a26 + a27
para cualquier x = a0 1 +
P7
i=1
ai ei ∈ O. Notemos que xx̄ = x̄x, lo cual implica que
kxk = kx̄k. De igual manera a como se ha hecho para los números complejos y para los
cuaterniones, se tiene que k · k es, en efecto, una norma que permite composición. Ası́, los
octoniones son un álgebra y un espacio vectorial con una norma que admite composición.
Por lo tanto, los octoniones son un álgebra de división normada.
I.2
La construcción de Cayley-Dickson
A primera vista, parece curioso que las álgebras de división normadas, de la sección
anterior, tengan dimensión 1 = 20 , 2 = 21 , 4 = 22 y 8 = 23 . Sin embargo, esto no es
una casualidad. El proceso de Cayley-Dickson nos permite generar un álgebra a partir de
otra, duplicando su dimensión. Esta construcción es una generalización de la manera como
se construyen los números complejos como pares de números reales. La construcción de
Cayley-Dickson puede ser consultada en el libro de R. Schafer [3], el libro de H. Reese [5]
y en la publicación de J. Baez [1], entre otros sitios.
Dada un álgebra V , se define una conjugación en V por un mapa R-lineal − : V → V
tal que
a=a
y
ab = ba
22
para todo a, b ∈ V . Si a = a para todo a ∈ V diremos que el álgebra V es real. El
proceso de Cayley-Dickson consiste en generar una nueva álgebra, V 0 , a partir de V , de
la siguiente forma. Los elementos en V 0 serán pares ordenados de elementos en V . La
suma de dos elementos en V 0 y la multiplicación de un elemento en V 0 por un escalar
se definen componente a componente. Generalmente, la multiplicación de dos elementos,
(a, b) y (c, d) en V 0 viene dada por la siguiente regla
(a, b) (c, d) = ac − db, ad + cb
(I.7)
Sin embargo, para facilitar las identificaciones con los elementos de la base de las álgebras
de división, tomaremos la siguiente definición para la regla de multiplicación en V 0 ,
(a, b) (c, d) = ac − db, bc + da
(I.8)
La diferencia entre las dos reglas de multiplicación anteriores es que la primera, (I.7),
involucra multiplicar los elementos de la base por la izquierda mientras que la segunda,
(I.8), multiplica los elementos de la base por la derecha.
Para que este proceso sea iterativo, se define una conjugación en V 0 por
(a, b) = (a, −b)
Es correcto llamar este mapa una conjugación ya que
(c, d) (a, b) = (c, −d) (a, −b)
ca − bd, −da − bc
= ac − db, −(bc + da)
= ac − db, bc + da
=
= (a, b) (c, d)
y también
(a, b) = (a, −b) = a, −(−b) = (a, b)
23
La R-linealidad de la conjugación en V 0 es consecuencia de la R-linealidad de la conjugación en V y que la multiplicación por un escalar se define componente a componente.
El elemento (1, 0) ∈ V 0 es la unidad en V 0 ya que
(1, 0) (a, b) = (a, b) (1, 0) = (a, b)
Por otro lado, el elemento v = (0, 1) ∈ V 0 es tal que v 2 = (−1, 0). Identificando (a, 0) ∈ V 0
con a ∈ V , se tiene que V 0 es la suma directa de espacios vectoriales V 0 = V ⊕ V v ya que
todo elemento en V 0 se descompone como (a, b) = (a, 0) + (b, 0) (0, 1).
Empezando por los números reales, sea V0 = R. Como la conjugación es R-lineal, entonces el álgebra V0 es real. Construimos el álgebra V1 = V00 aplicando el proceso de
Cayley-Dickson. Ası́, los elementos en V1 son de la forma (a, b) con a, b ∈ R. La regla de
multiplicación viene dada por
(a, b) (c, d) =
ac − db, bc + da
= (ac − db, ad + cb)
para cualesquiera (a, b) y (c, d) en V1 , y la conjugación por
(a, b) = (a, −b) = (a, −b)
ya que V0 es un álgebra real. Si identificamos la identidad en V1 , (1, 0), con la identidad
en R, propiamente el 1, y denotamos a (0, 1) ∈ V1 por e1 entonces, cualquier elemento en
V1 se descompone de la siguiente manera
(a, b) = a 1 + b e1
Además, e1 es tal que e21 = −1 y e1 ∈
/ R. Por tanto, una base para V1 es {1, e1 }. Es claro
que V1 ∼
= C.
Pasemos ahora a V2 = V10 . Si (a, b) y (c, d) son, ahora, dos elementos en V2 , entonces a, b,
24
c y d son elementos en V1 . Escribimos a = (a0 , a1 ), b = (b0 , b1 ), c = (c0 , c1 ) y d = (d0 , d1 ),
donde a0 , a1 , b0 , b1 , c0 , c1 , d0 , d1 ∈ V0 = R. Luego, el producto en V2 viene dado por
!
(a0 , a1 )(c0 , c1 ) − (d0 , −d1 )(b0 , b1 ),
(a, b) (c, d) =
(b0 , b1 )(c0 , −c1 ) + (d0 , d1 )(a0 , a1 )
!
(a0 c0 − c1 a1 − d0 b0 − b1 d1 , a1 c0 + c1 a0 + d1 b0 − b1 d0 ),
=
(I.9)
(b0 c0 + c1 b1 + d0 a0 − a1 d1 , b1 c0 − c1 b0 + d1 a0 + a1 d0 )
Notemos la similitud entre las ecuaciones (I.1) y (I.9). La conjugación de un elemento
(a, b) ∈ V2 viene dada por
(a, b) = ((a0 , a1 ), (b0 , b1 ))
= (a0 , a1 ), −(b0 , b1 )
= ((a0 , −a1 ), (−b0 , −b1 ))
Además, si identificamos y denotamos
1 = ((1, 0), (0, 0))
e1 = ((0, 1), (0, 0))
e2 = ((0, 0), (1, 0))
e3 = e1 e2 = ((0, 0), (0, 1))
entonces cualquier elemento (a, b) ∈ V2 se puede descomponer como
(a, b) = a 1 + b e2
con e2 ∈
/ V1 y a, b ∈ V1 . Equivalentemente, (a, b) = ((a0 , a1 ), (b0 , b1 )) ∈ V2 se descompone
como
(a, b) = a0 1 + a1 e1 + b0 e2 + b1 e3
donde los ei , i = 1, 2, 3, son tales que e2i = −1 y ei ∈
/ R. Ası́, el conjunto {1, e1 , e2 , e3 } es
base para V2 . Es claro que V2 ∼
= H.
Repitiendo, nuevamente, el proceso de Cayley-Dickson construimos un álgebra V3 = V20 .
25
De manera similar al caso anterior, la regla de multiplicación en V3 tiene la misma estructura que la regla de multiplicación dada para los Octoniones en (I.4). Si denotamos los
elementos de la base para V2 ∼
= H por i0 , i1 , i2 e i3 , donde i0 es la identidad e i1 i2 = i3 ,
entonces podemos construir una base para V3 de la siguente manera
(
(ik , 0)
, si k = 0, 1, 2, 3
ek =
(0, ik−4 ) , si k = 4, 5, 6, 7
(I.10)
Notemos que e0 es la identidad y que e2i = −e0 para i = 1, 2, . . . , 7. Sigamos denotando la
identidad por 1. Luego, todo elemento (a, b) ∈ V3 se puede descomponer como
(a, b) = a 1 + b e4
con e4 ∈
/ V2 y a, b ∈ V2 . Equivalentemente, podemos descomponer a
(a, b) = (((a0 , a1 ), (a2 , a3 )), ((b0 , b1 ), (b2 , b3 ))) ∈ V3
como
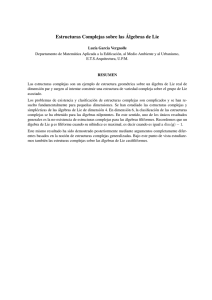
(a, b) = a0 1 + a1 e1 + a2 e2 + a3 e3 + b0 e4 + b1 e5 + b2 e6 + b3 e7
ya que la tabla de multiplicación entre los ei , con i = 1, 2, . . . , 7, se puede expresar
mediante el siguiente plano de Fano
e7
e1
e6
e4
e3
e2
e5
Figura I.3: Representación gráfica de la multiplicación de los ei ’s∈ V3 .
26
El conjunto {1, e1 , e2 , e3 , e4 , e5 , e6 , e7 } es una base para V3 . Sin embargo, las figuras (I.2) y
(I.3) muestran distintas reglas de multiplicación. Lo que sucede es que no hay una manera
única de construir una tabla multiplicativa para los Octoniones. En la construcción de
la sección anterior la subálgebra isomorfa a los Cuaterniones no aparece en el primer
cuadrante de la tabla multiplicativa, a diferencia de como sucede con la construcción de
Cayley-Dickson en donde los elementos del primer cuadrante de la tabla multiplicativa,
e0 , e1 , e2 y e3 , generan una subálgebra isomorfa a la de los Cuaterniones. En realidad, hay
480 maneras distintas de formar tablas multiplicativas para los Octoniones. Este resultado
proviene de las cantidad de posibilidades para escoger las dos subálgebras ortogonales
isomorfas, cada una, a los Cuaterniones. En una publicación de Schray y Manogue, ver [4],
y en el libro de Conway y Smith, ver [6], se puede encontrar este resultado con más detalle.
En este trabajo sólo consideraremos las construcciones de J. Baez, ver [1], y la que proviene
del proceso de Cayley-Dickson.
Cambiando la identificación hecha en (I.10) por,
e0 = (i0 , 0)
e1 = (i1 , 0) e2 = (i2 , 0) e4 = (i3 , 0)
e7 = −(0, i0 ) e3 = (0, i1 ) e6 = (0, i2 ) e5 = (0, i3 )
donde los ik , k = 0, 1, 2, 3, siguen siendo como antes, obtenemos una nueva tabla multiplicativa para los elementos de la base de V3 que coincide con la tabla (I.2). Ası́, resulta
V3 ∼
= O.
I.2.1
Forma matricial del proceso de Cayley-Dickson
Los números reales, los complejos y los cuaterniones se pueden representar por medio de
matrices. De hecho, los números reales se representan, trivialmente, por matrices 1 × 1 y
los números complejos por matrices 2 × 2
a −b
b a
donde a y b son reales. Para los Cuaterniones hemos mostrado, en la ecuación (I.2), una
forma de darles una representación matricial. Otra manera de dar una representación
27
matricial para los Cuaterniones es mediante las matrices de Pauli, explicitamente,
1 0
0 1
0 −i
1 0
σ0 =
σ1 =
σ2 =
σ3 =
0 1
1 0
i 0
0 −1
donde i2 − 1, y hacemos la correspondencia
e0 ←→ σ0
ej ←→ −iσj
, para j = 1, 2, 3
entre las matrices de Pauli y los elementos de la base de los Cuaterniónes.
Los Octoniones, al no ser asociativos, no permiten una representación matricial. Por lo
menos no con el producto usual de matrices. Sin embargo, en una publicación de J. Daboul
y R. Delbourgo, ver [7], podemos encontrar un arreglo matricial con una nueva regla de
multiplicación que permite darle una representación matricial a los Octoniones.
Daboul y Delbourgo consideran un arreglo
α A
B β
donde A y B son matrices cuadradas, α y β son escalares, y definen el siguiente producto
0
α A
α A0
αα0 + 21 Tr(AB 0 )
αA0 + β 0 A + 2i [B, B 0 ]
(I.11)
=
α0 B + βB 0 − 2i [A, A0 ]
ββ 0 + 12 Tr(BA0 )
B0 β0
B β
done [X, Y ] = XY − Y X y Tr(·) denota la traza de la matriz. También definen una
conjugación, dada por
α A
B β
=
β −A
−B α
(I.12)
Para representar a los Octoniones con este arreglo matricial, se hace la siguiente identificación
28
e0 → Ω0 =
e4 → Ω4 =
1 0
0 1
i 0
0 −i
ek → Ωk =
ek → Ωk =
0 −σk
σk
0
, k = 1, 2, 3
0
iσk−4
iσk−4
0
, k = 5, 6, 7
donde i2 = −1, las σk son las matrices de Pauli y los ek son los elementos de la base de
los Octoniones.
Las matrices de Pauli son Hermı́ticas, es decir, son iguales a su transpuesta conjugada.
Por otro lado, las matrices Ωk , para k = 1, 2, . . . , 7, son anti-Hermı́ticas y la identidad,
Ω0 , es Hermı́tica. Es decir,
Ω†0 = Ω0
Ω†k = −Ωk
, para k = 1, 2, . . . , 7
donde † denota la transformada Hermı́tica.
Sea x ∈ O, dado por x =
P7
k=0
ak ek . Entonces, usando la identificación anterior, le
podemos dar al octonión x una representación mediante un arreglo matricial de la siguiente
forma
w −A
A† w
con w = a0 + a4 i y A = (a1 − a5 i)σ1 + (a2 − a6 i)σ2 + (a3 − a7 i)σ3 .
Consideremos el siguiente conjunto
α A
A=
B β
:
A, B ∈ MN ×N
Si pensamos en los elementos de la diagonal como múltiplos escalares de la matriz identidad IN ×N , entonces A ⊂ M2N ×2N . El producto definido en (I.11) se puede extender a
0
α A
α A0
αα0 + λ0 (A · B 0 )
αA0 + β 0 A − λ [B, B 0 ]
?
=
B β
B0 β0
α0 B + βB 0 + λ [A, A0 ]
ββ 0 + λ0 (B · A0 )
29
donde λ, λ0 ∈ C y ( · ) denota cualquier mapa bilineal apropiado. Este producto hace de
A un álgebra cerrada, la cual denotaremos por A? . Dado un elemento en A? , definimos
su conjugado mediante la ecuación (I.12).
El álgebra A? posee una signatura. Consideremos la siguiente subálgebra
α A
?
?
A+ =
∈A
: B = −A y β = α
B β
Luego, obtenemos la siguiente signatura para A? ,
A? = A?+ ⊕ A?− = A?+ ⊕ K ? A?+ = A?+ ⊕ KA?+
1 0
donde K =
. La última igualdad es consecuencia del hecho que el producto ?
0 −1
coincide con el producto usual de matrices para la multiplicación entre cualquier X ∈ A?
y la matriz K. En efecto, si X ∈ A? entonces
α A
X =
B β
α−β
α+β
1
1
(A
−
B)
(A
+
B)
2
2
2
=
+ 1 2
α+β
(A + B)
− α−β
− 12 (A − B)
2
2
2
α+β
α−β
1
(A − B)
1 0
2
2
2
=
+
?
α+β
1
1
0
−1
− 2 (A − B)
−
(A
+ B)
2
2
1
(A + B)
2
α−β
2
Además, si X, Y ∈ A?+ y W, Z ∈ A?− entonces X ? Y ∈ A?+ , W ? Z ∈ A?+ , X ? W ∈ A?− y
W ? X ∈ A?− , por lo que, de hecho, estamos en presencia de una signatura. Estas contenciones se demuestran usando las siguientes igualdades
0
α A
α A0
X ? (KY ) =
?
−A α
A0 −α0
αα0 + λ0 (A · A0 )
αA0 − α0 A + λ[A, A0 ]
=
αA0 − α0 A + λ[A, A0 ] −αα0 − λ0 (A · A0 )
1 0
αα0 + λ0 (A · A0 )
αA0 − α0 A + λ[A, A0 ]
=
0 −1
−αA0 + α0 A − λ[A, A0 ]
αα0 + λ0 (A · A0 )
0
1 0
α −A
α
A0
=
?
0 −1
A α
−A0 α0
= K(X ? Y )
(I.13)
30
(KX) ? Y
=
0
α A
α
A0
?
−A0 α0
A −α
αα0 − λ0 (A · A0 )
αA0 − α0 A + λ[A, A0 ]
αA0 − α0 A + λ[A, A0 ] −αα0 − λ0 (A · A0 )
1 0
αα0 − λ0 (A · A0 )
αA0 − α0 A + λ[A, A0 ]
0 −1
−αA0 + α0 A − λ[A, A0 ]
αα0 + λ0 (A · A0 )
0
α A
1 0
α
A0
?
0
−A α0
−A α
0 −1
K(Y ? X)
(I.14)
=
=
=
=
(KX) ? (KY ) =
0
α A
α A0
?
A −α
A0 −α0
αα0 + λ0 (A · A0 )
αA0 − α0 A − λ[A, A0 ]
=
−αA0 + α0 A + λ[A, A0 ]
αα0 + λ0 (A · A0 )
0
α
A0
α −A
=
?
0
−A α0
A α
= Y ?X
(I.15)
y el hecho que A?+ es una subálgebra.
Esta descomposición del álgebra A? permite dar una representación, con un arreglo matricial, del proceso de Cayley-Dickson de la siguiente forma. Sean v ∈ R o C y µ = v 2 .
Definamos vK = vK y notemos que vK vK = v 2 I2N ×2N = µI2N ×2N . Entonces, dados
X1 , X2 , X3 y X4 pertenecientes a A?+ , tenemos que
(X1 + vK X2 ) ? (X3 + vK X4 ) = X1 ? X3 + X1 ? vK X4 + vK X2 ? X3 + vK X2 ? vK X4
= X1 ? X3 + vK (X1 ? X4 ) + vK (X3 ? X2 ) + v 2 (X4 ? X2 )
= (X1 ? X3 + µX4 ? X2 ) + vK (X1 ? X4 + X3 ? X2 )
(I.16)
ya que el producto ? es bilineal y haciendo uso de las igualdades (I.13), (I.14) y (I.15).
Pidiendo que v sea tal que v 2 = −1, notemos la semejanza entre (I.16) y la regla de
multiplicación dada en (I.7).
31
I.3
El Teorema de Hurwitz
El célebre Teorema de Hurwitz tiene varias versiones. En el libro de R. Schafer (ver [3]) se
encuentra una de las versiones más generales del teorema, para epacios vectoriales sobre
cuerpos con caracterı́stica distinta de dos. Nosotros estamos considerando como cuerpo
a los números reales los cuales, tienen caracterı́stica cero y por tanto, caen dentro de las
posibilidades consideradas por Schafer. Sin embargo, este tratamiento más general involucra un análisis más complejo del necesario para probar el teorema en el caso donde el
cuerpo son los números reales.
Hemos encontrado distintas pruebas de este teorema, entre ellas, en el libro de F. R. Harvey (ver [5]), la publicación de J. Baez (ver [1]) y en el libro electrónico de Allen Hatcher
(ver [8]). Sin embargo, preferimos seguir la prueba dada por J. H. Conway y D. A. Smith,
en su libro titulado On quaternions and octonions: their geometry, arithmetic, and symmetry (ver [6]), por la simplicidad de su exposición.
Sea V un álgebra de división normada sobre los números reales. Si la dimensión de V
es igual a 1, entonces V ∼
= R. Supongamos que V tiene dimensión n > 1. En virtud del
proceso de Cayley-Dickson, tenemos que si V posee una subálgebra propia, W , entonces
también contiene a W 0 , donde W 0 se construye a partir de W aplicando el proceso de
Cayley-Dickson. Notemos que toda álgebra de división normada posee a los números reales como subálgebra. Si n = 2 entonces V ∼
= C, y si n > 2 entonces V posee una subálgebra
propia de dimensión 2 obigando la dimensión de V ser n ≥ 4. Si n = 4 entonces V ∼
= H, y
si n > 4 entonces V posee una subálgebra propia de dimensión 4 obligando la dimensión
de V ser n ≥ 8. Si n = 8 entonces V ∼
= O, y si n > 8 entonces V posee una subálgebra
propia de dimensión 8 obligando la dimensión de V ser n ≥ 16. Sin embargo, veremos que
la dimensión de V no puede ser mayor que ocho.
En la publicación de N. Jacobson, Composition algebras and their automorphisms (ver [9]),
32
encontramos que cualquier álgebra de división normada posee una involución x 7→ x̄ tal
que la norma viene dada por xx̄. El tratamiento de las álgebras de división normadas es
completamente análogo si la norma se define mediante kxk = xx̄ o kxk2 = xx̄. Para ser
consistentes en esta exposición, usaremos la segunda opción. Consideremos entonces una
conjugación, − : V → V , en V y definamos la norma, k k : V → R≥0 , por kxk2 = xx para
cualquier x ∈ V . Supongamos que V proviene de aplicarle el proceso de Cayley-Dickson a
V0 . Ası́, los elementos en V = V00 vienen dados por (a, b) con a, b ∈ V0 . Recordemos la regla
de multiplicación dada en (I.8). Observemos que si V tiene una norma que permite composición entonces V0 también, ya que los elementos a ∈ V0 se identifican con los elementos
(a, 0) ∈ V = V00 . Luego, si (a, b) y (c, d) son dos elementos en V = V00 , tenemos que
ac − db, bc + da = k(a, b)(c, d)k = k(a, b)k k(c, d)k
ya que la norma k k permite composición y, equivalentemente,
ac − db, bc + da 2 = k(a, b)k2 k(c, d)k2
(I.17)
Por un lado,
ac − db, bc + da 2 =
=
ac − db, bc + da ac − db, bc + da
ac − db, bc + da ca − bd, −bc − da
(ac − db)(ca − bd) − (−cb − ad)(bc + da),
!
=
(bc + da)(ac − db) + (−bc − da)(ac − db)
=
(kak2 + kbk2 )(kck2 + kdk2 ) + 2Re (cb)(da) − (ac)(bd) , 0
y por otro,
k(a, b)k2 k(c, d)k2 =
=
kak2 + kbk2 , 0 kck2 + kdk2 , 0
(kak2 + kbk2 )(kck2 + kdk2 ), 0
Ası́, para que la ecuación (I.17) sea válida es necesario que
Re (cb)(da) − (ac)(bd) = 0
(I.18)
33
Notemos que no estamos asumiendo ni asociatividad ni conmutatividad en V0 y, por tanto,
tampoco asumimos estas propiedades en V . Recordemos que tanto el conmutador como
el asociador tienen parte real igual a cero. De hecho, las pruebas dadas en las ecuaciones (I.3) y (I.6) se pueden repetir, de forma análoga, dentro del contexto de la construcción
de Cayley-Dickson. Como consecuencia tenemos las siguientes identidades
Re(xy) = Re([x, y] + yx) = Re(yx)
y también
Re(x(yz)) = Re((xy)z − [x, y, z]) = Re((xy)z)
para cualesquiera x, y, z en V . Aplicando estas identidades, repetidamente, a la condición
dada en (I.18) obtenemos que
0 = Re (cb)(da) − (ac)(bd)
= Re (da)(cb) − (ac)(bd)
= Re d(a(cb)) − ((ac)b)d
= Re (a(cb))d − ((ac)b)d
= Re [a, c, b]d
Como los a, b, c y d son arbitrarios, se tiene que necesariamente [a, c, b] = 0 para que la
ecuación (I.18) valga. Ası́, la norma en V = V00 permite composición si, y sólo si, V0 es
asociativa. Por lo tanto, V = V00 es un álgebra de división normada si, y sólo si, V0 es un
álgebra de división normada asociativa.
Ahora, supongamos que V0 = V000 es un álgebra de división normada asociativa. Entonces si
(a, b), (c, d) y (e, f ) son elementos en V0 , veamos que propiedades impone la asociatividad
de V0 sobre V00 . Por un lado,
(a, b) ((c, d)(e, f )) = (a, b) ce − f d, de + f c
=
a(ce) − a(f d) − (ed)b − (cf )b, b(ec) − b(df ) + (de)a + (f c)a
34
y por otro,
((a, b)(c, d)) (e, f ) =
=
ac − db, bc + da (e, f )
(ac)e − (db)e − f (bc) − f (da), (bc)e + (da)e + f (ac) − f (db)
Como V0 es asociativa, tenemos que las dos expresiones anteriores deben ser iguales para
cualesquiera a, b, c, d, e y f pertenecientes a V00 . Esto implica que, necesariamente, V00
es un álgebra de división normada, asociativa y conmutativa. En efecto, si fijamos a f
como la identidad en V00 y b = d = e = 0 obtenemos que ca = ac. Lo cual implica la
conmutatividad de V00 , ya que los elementos considerados son arbitrarios. Por lo tanto,
V0 = V000 es un álgebra de división normada asociativa si, y sólo si, V00 es un álgebra de
división normada, asociativa y conmutativa.
Finalmente, si V00 = V0000 es un álgebra de división normada, asociativa y conmutativa
entonces, dados (a, b) y (c, d) en V00 tenemos que
ac − db, bc + da = (a, b)(c, d) = (c, d)(a, b) = ca − bd, da + bc
ya que V00 es conmutativa. Si fijamos a d como la identidad en V000 y b = c = 0, obtenemos
que a = a. Esto último implica que V000 es real, ya que a es arbitrario. Por lo tanto, V00 = V0000
es un álgebra de división normada, asociativa y conmutativa si, y sólo si, V000 es un álgebra
de división normada, asociativa, conmutativa y real.
Toda álgebra de división normada sobre los números reales posee a R como subálgebra.
Dado que R es un álgebra de división normada, asociativa, conmutativa y real, le aplicamos
el proceso de Cayley-Dickson repetidamente para obtener la siguiente sucesión de álgebras
de división normadas
R ,→ C ,→ H ,→ O
Como los octoniones no son asociativos, tenemos que si aplicamos nuevamente el proceso
de Cayley-Dickson obtenemos un álgebra, de dimensión dieciseis, que no puede ser normada. De hecho, esta siguiente álgebra, llamada los Sedenios, tampoco resulta ser de
35
división. Con esto hemos probado el Teorema de Hurwitz, es decir, las únicas3 álgebras
de división normadas sobre los números reales son R, C, H y O.
I.4
Grupos de Automorfismos
Dada un álgebra de división normada, K, un automorfismo de K es un isomorfismo
lineal de K en K. Es decir, ϕ es un automorfismo de K si
ϕ(λx + y) = λϕ(x) + ϕ(y)
(I.19)
ϕ(xy) = ϕ(x)ϕ(y)
(I.20)
para todo x e y en K y λ ∈ R.
A veces en la literatura se encuentra un refinamiento de esta definición. Se hace una distinción entre los automorfismos que preservan el orden del producto y los que lo invierten.
Se dice que un automrfismo es propio si cumple con la condición dada en (I.20), y que
es impropio cuando en lugar de cumplir con la condición (I.20) cumple con
ϕ(xy) = ϕ(y)ϕ(x)
Es decir, un automorfismo se dice impropio si invierte el orden de la multiplicación. Por
ejemplo, la conjugación es un automorfismo impropio de K. Notemos que si K es conmutativa entonces las definiciones de automorfismos propios e impropios coinciden. La
definición de automorfismo que hemos considerado es la de automorfismo propio.
El conjunto formado por los automorfismos de un álgebra es un grupo con la operación
dada por la composición. Denotaremos por Aut(K) al grupo de automorfismos de K.
Por la condición (I.19) se tiene que un automorfismo, ϕ, queda totalmente determinado
por las imáges de los elementos de la base en K.
3
Es claro que la unicidad hace referencia a la estructura algebráica. En rigor, se debe decir que estas
son las únicas álgebras de división normadas, salvo isomorfismos.
36
Si K = R, el único automorfismo posible es la identidad ya que
ϕ(1) = ϕ(1 · 1) = ϕ(1)ϕ(1) = (ϕ(1))2
para cualquier ϕ ∈ Aut(R), de donde se desprende que ϕ(1) = 1. Por lo tanto, se tiene
que Aut(R) ∼
= {0}. De hecho, para cualquier álgebra de división normada se tiene que sus
automorfismos fijan la parte real de sus elementos.
Una observación importante es que los automorfismos preservan la norma. En efecto,
ϕ(x̄) = ϕ(x) para todo x ∈ K, lo cual implica que
kxk2 = ϕ kxk2 = ϕ (xx̄) = ϕ(x)ϕ(x̄) = ϕ(x)ϕ(x) = kϕ(x)k2
para cualquier álgebra de división normada, K, y ϕ ∈ Aut(K).
Consideremos ahora K = C. Una base para los números complejos es el conjunto {1, i},
con i2 = −1. Notemos que
−1 = ϕ(−1) = ϕ(i2 ) = ϕ(i)ϕ(i) = (ϕ(i))2
para cualquier ϕ ∈ Aut(C). Entonces, las dos posibilidades para la imagen de i bajo ϕ
son ϕ(i) = ±i. Estas dos posibilidades corresponden a la identidad y a la conjugación de
números complejos. Por lo tanto, Aut(C) ∼
= Z2 .
Pasemos ahora a los cuaterniones. Recordemos que una base para H es {1, i, j, k} tales que
i2 = j 2 = k 2 = −1 e ijk = −1. Observemos que la parte imaginaria de los cuaterniones se
puede identificar con R3 usando el producto cruz como multiplicación. Para ϕ ∈ Aut(H)
basta estudiar la acción de ϕ sobre la parte imaginaria de H, ya que ϕ fija la parte real.
Por la observación anterior, ϕ está en correspondencia con alguna transformación de R3
que preserve el producto cruz y la norma y, por ende, el producto interno de R3 . Es
decir, cada automorfismo ϕ ∈ Aut(H) está en correspondencia con una transformación en
SO(3). Ası́, Aut(H) ∼
= SO(3).
37
El caso de los octoniones es más delicado pero, a su vez, más interesante. Elie Cartan, en
su publicación titulada Les groupes réels simples, finis et continus (ver [10]), clasificó todos
los grupos de Lie
4
semi-simples. En esta clasificación, E. Cartan demostró que el grupo
de automorfismos de los octoniones es un grupo de Lie del tipo G, de rango 2 y con 14
parámetros. Es por eso que a Aut(O) se le denota por G2 . Sin embargo, esta no es la única
descripción de Aut(O). En las publicaciones de R. Bryant, ver [11], y de D. Joyce, ver [12],
ellos muestran que Aut(O) es isomorfo a un grupo de Lie que preserva cierta 3-forma.
M. Günaydin y F. Gürsey, ver [13], y C. Manogue con J. Schray, ver [14], describen los
automorfismos de los octoniones mediante rotaciones. Por último, G. Moreno demuestra
que el conjunto de los divisores del cero, de norma igual a uno, en los Sedenios es isomorfo
a Aut(O).
Determinaremos los elementos de Aut(O) usando rotaciones. Recordemos el diagrama que
representa la tabla multiplicativa para los octoniones, figura I.2. Si ei y ej , distintos, son
tales que e2i = e2j = −1 entonces ellos, junto con ek = ei ej , definen un subespacio isomorfo
a los cuaterniones. Observando la figura, nos damos cuenta que ek también está dentro de
otros dos subespacios isomorfos a los cuaterniones. Por otro lado, cualquier otro elemento
el , distinto de ei , ej y ek , tal que e2l = −1 permite reconstruir la tabla multiplicativa. Este
trio (ei , ej , el ) se llama un triplete generador. Un automorfismo de O manda tripletes
generadores en tripletes generadores. Es por ello que empezaremos considerando todas
las rotaciones que involucren dos subespacios isomorfos a los cuaterniones que tengan un
elemento, ek , en común.
Si a y b son dos octoniones entonces, una rotación en el subespacio cuaternionico generado
por a y b viene dada por
Sa b (x) = < a, x > b− < b, x > a
= Re (āx) b − Re b̄x a
4
La definición de grupo de Lie se dará en el siguiente capı́tulo. Sin embargo, esto no perjudica el orden
de las ideas en esta exposición.
38
Notemos que Sb a = −Sa b .
Como estamos interesados en trabajar con los elementos de la base para los octoniones,
simplifiquemos la notación considerando Sij = Sei ej . Luego,
Sij (x) = < ei , x > ej − < ej , x > ei
= Re (ej x) ei − Re (ei x) ej
para cualquier octonión x. Para involucrar un triplete generador, es necesario rotar, simultáneamente, en dos subespacios isomorfos a los cuaterniones. Ası́, obtenemos 42 rotaciones que involucren dos subespacios isomorfos a los cuaterniones.
S12 + S47
S12 + S35
S23 + S45
S23 − S67
S31 + S46
S31 + S57
S36 + S14
S36 − S27
S65 + S47
S65 + S12
S53 + S24
S53 + S17
S17 − S35
S17 + S24
S76 + S45
S76 + S23
S61 + S34
S61 + S25
S25 − S16
S25 + S34
S57 + S46
S57 − S13
S72 + S14
S72 + S36
S14 − S27
S14 + S36
S45 + S23
S45 − S67
S51 − S26
S51 − S37
S24 − S35
S24 + S17
S46 − S13
S46 + S57
S62 − S15
S62 − S37
S34 − S16
S34 + S25
S47 + S12
S47 − S56
S73 − S15
S73 − S26
Tabla I.3: Las 42 rotaciones que involucran dos subespacios isomorfos a los cuaterniones.
Notemos que en este conjunto, de 42 rotaciones, hay elementos repetidos y algunos que
se pueden expresar como combinaciones de otros. Para hallar un subconjunto generador,
restemos las rotaciones agrupadas por los cuadros como se muestra en la tabla I.3. Esto
produce un conjunto con 21 rotaciones. De estas rotaciones seleccionamos un subconjunto
generador, que tendrá 14 elementos.
Las 14 rotaciones que aparecen en la tabla I.4 son independientes, ya que cada una de
ellas posee un elemento Sij que no aparece en las demás rotaciones. Además, cualquier
rotación de la tabla I.3 se puede generar a partir de estas últimas.
39
S12 − S47
S12 + S56
S13 + S57
S14 + S27
S15 − S37
S16 + S25
S17 + S35
S23 − S45
S24 + S35
S25 − S34
S26 − S37
S27 + S36
S45 + S67
S46 − S57
Tabla I.4: Las 14 rotaciones que generan las de la tabla I.3.
Sea x = x0 1 +
P7
i=1
xi ei , un octonión. En virtud de de la tabla I.4, podemos construir
los 14 generadores de Aut(O) de la siguiente forma.
g1 (x) = x0 1 − x2 e1 + x1 e2 + x3 e3 + x7 e4 + x5 e5 + x6 e6 − x4 e7
g2 (x) = x0 1 − x2 e1 + x1 e2 + x3 e3 + x4 e4 − x6 e5 + x5 e6 + x7 e7
g3 (x) = x0 1 − x3 e1 + x2 e2 + x1 e3 + x4 e4 − x7 e5 + x6 e6 + x5 e7
g4 (x) = x0 1 − x4 e1 − x7 e2 + x3 e3 + x1 e4 + x5 e5 + x6 e6 + x2 e7
g5 (x) = x0 1 − x5 e1 + x2 e2 + x7 e3 + x4 e4 + x1 e5 + x6 e6 − x3 e7
g6 (x) = x0 1 − x6 e1 − x5 e2 + x3 e3 + x4 e4 + x2 e5 + x1 e6 + x7 e7
g7 (x) = x0 1 − x7 e1 + x2 e2 − x5 e3 + x4 e4 + x3 e5 + x6 e6 + x1 e7
g8 (x) = x0 1 + x1 e1 − x3 e2 + x2 e3 + x5 e4 − x4 e5 + x6 e6 + x7 e7
g9 (x) = x0 1 + x1 e1 − x4 e2 − x5 e3 + x2 e4 + x3 e5 + x6 e6 + x7 e7
g10 (x) = x0 1 + x1 e1 − x5 e2 + x4 e3 − x3 e4 + x2 e5 + x6 e6 + x7 e7
g11 (x) = x0 1 + x1 e1 − x6 e2 + x7 e3 + x4 e4 + x5 e5 + x2 e6 − x3 e7
g12 (x) = x0 1 + x1 e1 − x7 e2 − x6 e3 + x4 e4 + x5 e5 + x3 e6 + x2 e7
g13 (x) = x0 1 + x1 e1 + x2 e2 + x3 e3 − x5 e4 + x4 e5 − x7 e6 + x6 e7
g14 (x) = x0 1 + x1 e1 + x2 e2 + x3 e3 − x6 e4 + x7 e5 + x4 e6 − x5 e7
Notemos que todos los elementos que hemos dado, gi , para Aut(O) son raı́ces cuartas de
la unidad. Es decir, gi4 (x) = x para todo i = 1, . . . , 14.
40
A manera de comentario, en la publicación de P. Eakin y A. Sathaye (ver [15]) se encuentra
una descripción de los grupos de automorfismos para las demás álgebras generadas con el
proceso de Cayley-Dickson.
41
Capı́tulo II
El isomorfismo entre sl(2, Kn) y so(1, n + 1)
para n = 1, 2, 4 y 8
En este capı́tulo desarrollaremos los isomorfismos entre las álgebras de Lorentz, so(1, n+1),
y las álgebras ortogonales, sl(2, Kn ), donde Kn es el álgebra de divisón de dimensión n.
Para construir el grupo de Lorentz, en dimensión 3, 4, 6 y 10, usaremos las ideas presentadas por Lázaro Recht en su libro titulado Geometrı́a Hiperbólica y Relatividad Especial
(ver [16]). Las construcciones de las álgebras sl(2, R), sl(2, C) y sl(2, H) son bien conocidas
y se pueden encontrar en los libros de F. Harvey, Spinors and calibrations (ver [5]), y de
P. Lounesto, Clifford algebras and spinors (ver [17]). Sin embargo, es nada obvio definir
el álgebra sl(2, O). Para ello, acudimos a las publicaciones [18] y [19] de A. Sudbery.
Recordemos algunos hechos del álgebra lineal. Dado un espacio vectorial, V , con producto
interno y de dimensión finita entonces, para cualquier operador lineal, T , en V , existe un
único operador lineal, T ∗ , sobre V tal que hT x, yi = hx, T ∗ yi, para todo x, y ∈ V . Tal
operador, T ∗ , se llama el adjunto de T . Sea f una forma bilineal sobre V . Se dice que
T preserva f si f (T x, T y) = f (x, y) para todo x, y ∈ V . Si la forma bilineal, f , es no
degenerada entonces se tiene que el conjunto de todos los operadores lineales sobre V que
preservan a f es un grupo bajo la operación de composición. Una excelente referencia
bibliográfica sobre el álgebra lineal es el libro de K. Hoffman y R. Kunze (ver [20]). La
situación que nos interesa es cuando V es un espacio vectorial real. En tal caso se puede
decir algo más sobre el operador adjunto. Si V = Rk y h , i es el producto canónico de Rk
42
entonces, el operador adjunto de un operador lineal es el operador transpuesto1 .
Consideremos V = Rn+1 dotado de la siguiente forma cuadrática
q(x) = −x20 + x21 + x22 + · · · + x2n
con x = (x0 , x1 , . . . , xn )T ∈ Rn+1 . Usando la identidad de polarización, podemos recuperar
la forma bilineal simétrica asociada a la forma cuadrática q. Sean x = (x0 , x1 , . . . , xn )T y
x0 = (x00 , x01 , . . . , x0n )T dos vectores de Rn+1 . Luego,
f (x, x0 ) =
=
1
(q(x + x0 ) − q(x − x0 ))
4
0 2
0 2
0 2
0 2!
1 −(x0 + x0 ) + (x1 + x1 ) + (x2 + x2 ) + · · · + (xn + xn )
4
+(x0 − x00 )2 − (x1 − x01 )2 − (x2 − x02 )2 − · · · − (xn − x0n )2
1
(−(2x0 )(2x00 ) + (2x1 )(2x01 )(2x2 )(2x02 ) + · · · + (2xn )(2x0n ))
4
= −x0 x00 + x1 x01 + x2 x02 + · · · + xn x0n
=
que es, además, no degenerada. A la forma bilineal f se le llama la forma bilineal de
Lorentz. Notemos que
f (x, x0 ) = xT ηx0
donde η es una matriz (n + 1) × (n + 1), diagonal, de
−1
1
1
η=
..
.
la siguiente forma
1
Observemos que η = η −1 = η T . La forma bilineal de Lorentz está asociada al producto
interno canónico de Rn+1 de la siguiente manera
f (x, x0 ) = hηx, x0 i
1
Si V es un espacio de dimensión finita entonces, todo operador lineal sobre V está asociado a una
matriz. El operador transpuesto es el que está asociado a la matriz transpuesta del operador lineal.
43
Llamaremos al grupo de las transformaciones lineales invertibles de Rn+1 que preservan
la forma bilineal de Lorentz el Grupo de Lorentz de Rn+1 , el cual denotaremos por
O(1, n). Es decir,
O(1, n) = Λ ∈ GL(n + 1, R)
:
f (Λx, Λx0 ) = f (x, x0 ), ∀x, x0 ∈ Rn+1
donde GL(k, R), el grupo general lineal, es el conjunto de todas las matrices k × k invertibles con entradas reales.
Queremos caracterizar los elementos del Grupo de Lorentz. Sea Λ ∈ O(1, n), entonces
f (Λx, Λx0 ) = hηΛx, Λx0 i = ΛT ηΛx, x0
Como f (x, x0 ) = hηx, x0 i y f (Λx, Λx0 ) = f (x, x0 ), ∀x, x0 ∈ Rn+1 , entonces se tiene que
ΛT ηΛ = η
(II.1)
para toda Λ ∈ O(1, n). Por lo tanto, la ecuación (II.1) caracateriza a los elementos del
Grupo de Lorentz.
Sin embargo, estamos interesados en un grupo más pequeño. El problema es que el Grupo
de Lorentz, O(1, n), no es conexo. De hecho, el Grupo de Lorentz posee cuatro componentes conexas. De la ecuación (II.1) se desprende, tomando el determinante de ambos
lados de la igualdad y haciendo el producto del lado izquierdo para comparar el primer término de la matriz resultante con el primer término de η que, (det Λ)2 = 1 y
Λ200 − (Λ210 + Λ220 + · · · + Λ2n0 ) = 1, donde la matriz Λ viene dada por Λ = (Λ)ij con
i, j ∈ {0, 1, 2, . . . , n}. Entonces, las cuatro componentes conexas provienen de las combinaciones de det Λ = ±1 y sgn Λ00 = ±1, donde sgn (·) es la función signo. Denotemos por
SO(1, n) a la componente conexa, del Grupo de Lorentz, que contiene a la identidad. Es
decir,
SO(1, n) = {Λ ∈ O(1, n)
:
det Λ = 1 y sgn Λ00 = 1}
44
con Λ = (Λ)ij , para i, j ∈ {0, 1, 2, . . . , n}. A veces, SO(1, n) es llamado el grupo propio
ortócrono de Lorentz. Este nombre se le da ya que sus elementos preservan la orientación del tiempo, como se explicará en los siguientes párrafos.
Los puntos, o vectores, de Rn+1 se pueden descomponer de la siguiente manera. Diremos
que
x ∈ Rn+1 es del tipo temporal si
f (x, x) < 0,
x ∈ Rn+1 es del tipo luz si
f (x, x) = 0,
x ∈ Rn+1 es del tipo espacial si
f (x, x) > 0,
para f la forma bilieal de Lorentz y x 6= 0. La siguiente figura muestra como la forma
bilineal de Lorentz separa a Rn+1 .
espacial
luz
temporal
f(x,x)<0
f(x,x)=0
x0
f(x,x)>0
(x1,x2, . . . ,xn)
Figura II.1: Descomposición del espacio-tiempo de acuerdo a la forma bilineal de Lorentz.
Si Λ pertenece al grupo de Lorentz entonces ella preserva la forma bilineal de Lorentz.
Por lo tanto, los operadores lineales del grupo de Lorentz preservan esta descomposición
del espacio en elementos del tipo temporal, luz y espacial, y de la misma forma. Es decir,
Λx es de un tipo si, y sólo si, x es del mismo tipo.
Llamaremos al primer eje coordenado de Rn+1 el eje temporal, mientras que las demás
45
coordenadas se llamarán espaciales. El signo de la entrada Λ00 determina si la transformación lineal Λ preserva, en el caso de sgn Λ00 = 1, la dirección en el eje temporal o si
la invierte, en el caso que sgn Λ00 = −1. Un operador lineal perteneciente al grupo de
Lorentz puede dejar invariante tanto la orientación temporal como las espaciales, invertir
solamente la orientación del eje temporal, invertir solamente la orientación espacial o,
invertir tanto la oritentación temporal como la espacial.
Ası́ tenemos que φ : O(1, n) → Z2 × Z2 , dada por φ(Λ) = (det Λ, sgn Λ00 ) es un homomorfismo sobreyectivo de grupos. Además, el kernel de este homomorfismo es, precı́samente,
SO(1, n). Por lo tanto, SO(1, n) es un subgrupo normal de O(1, n).
Recordemos que un grupo de Lie es un grupo que tiene una estructura de variedad
diferenciable, tal que las operaciones de multiplicación e inversión son suaves. El grupo de
Lorentz, O(1, n), es un subgrupo de Lie de GL(n + 1, R), ya que O(1, n) es un subgrupo
que, naturalmente, es una subvariedad inmersa de GL(n + 1, R). Por lo tanto, el grupo
propio ortócrono de Lorentz, SO(1, n), también es un grupo de Lie ya que es la componente conexa de O(1, n) que contiene a la identidad.
Un álgebra de Lie es un par (V, [ , ]) donde V es un espacio vectorial y [ , ] : V × V → V
es un mapa bilineal tal que
• [X, Y ] = −[Y, X]
• [[X, Y ], Z] + [[Z, X], Y ] + [[Y, Z], X] = 0
para cualesquiera X, Y, Z ∈ V . La segunda condición se llama la identidad de Jacobi.
Dado un grupo de Lie, G, se construye un álgebra de Lie tomando el conjunto de todos
los campos infinitamente diferenciables, X, tales que X ◦ la = la0 X para todo a ∈ G con
la (·) = a(·), y [ , ] el corchete de campos. El mapa la : G → G dado por la (x) = ax
se llama la traslación a izquierda, por lo que los campos X que satisfacen la condición
46
X ◦ la = la0 X ∀a ∈ G se les dice campos invariantes a izquierda. Esta álgebra de Lie se
llama el álgebra de Lie de G y la denotaremos, con letras germánicas en minúscula, por
g. Todos los elementos de g están totalmente determinados por su valor en la identidad
de G. Como consecuencia tenemos que g se identifica con el espacio tangente a G en la
identidad. Como referencia para la costrucción y propiedades de los grupos de Lie y las
álgebras de Lie hemos usando, por ejemplo, los libros de D. H. Sattinger y O. L. Weaver,
Lie groups and algebras with applications to physics, geometry and mechanics (ver [21]),
y de M. Hausner y J. T. Schwartz, Lie groups; Lie algebras (ver [22]).
Estudiemos el álgebra de Lie so(1, n). Sea Λ(t) una curva en SO(1, n), que pasa por la
identidad en t = 0. Los elementos en so(1, n) son los vectores tangentes a SO(1, n) en la
identidad y, por tanto, corresponden a los vectores dtd Λ(t)t=0 . Como Λ(t) es una curva
en SO(1, n), se tiene que ΛT (t)ηΛ(t) = η para todo t en un entorno del cero. Tomando la
derivada respecto de t de ambos lados obtenemos que
d
d T
T
Λ (t) ηΛ(t) + Λ (t)η
Λ(t) = 0
dt
dt
para todo t en un entorno del cero. Si evaluamos en t = 0, obtenemos que los elementos
ω ∈ so(1, n), dados por dtd Λ(t)t=0 , satisfacen la siguiente condición
ω T η + ηω = 0
ya que Λ(0) es la matriz identidad. Como η = η T , podemos reescribir la condición anterior
de la siguiente forma
0 = ω T η + ηω = ω T η T + ηω = (ηω)T + ηω
Ası́, caracterizamos el álgebra de Lie de SO(1, n) por
so(1, n) = ω ∈ Mn+1 (R)
:
ηω = −(ηω)T
(II.2)
con el corchete, [ , ], dado por [ω, ω 0 ] = ωω 0 − ω 0 ω para ω, ω 0 ∈ so(1, n). Mn+1 (R) denota
al conjunto de todas las matrices cuadradas, de tamaño n + 1 × n + 1, con entradas reales.
47
Recordemos que el álgebra de Lie del grupo general lineal, GL(n + 1, R), es Mn+1 (R).
Es decir, gl(n + 1, R) = Mn+1 (R) y el corchete de campos es el conmutador de matrices.
Como so(1, n) es una subálgebra de Lie de gl(n+1, R), tenemos que el corchete en so(1, n)
también viene dado por el conmutador de matrices.
II.1
El isomorfismo sl(2, R) ∼
= so(1, 2).
Lo que haremos en esta sección será dar un isomorfismo entre sl(2, R) y so(1, 2). De
los cuatro isomorfismos que se mostrarán en este capı́tulo, este es ciertamente el menos
interesante. En esta sección no haremos una construcción elaborada ya que consideramos
que es el isomorfismo de la siguiente sección es el que refleja las cualidades más interesantes
en su construcción. Además, el isomorfismo de la próxima sección es el más conocido.
sl(2, R) es el conjunto de matrices 2 × 2 con entradas reales tales que su traza es cero,
dotada de un corchete dado por el conmutador de matrices, el cual hace de sl(2, R) un
álgebra de Lie. Es claro que el conmutador de matrices es antisimétrico y que satisface la
identidad de Jacobi ya que el producto de matrices es asociativo.
Recordemos la expresión dada en (II.2), en el caso particular de n = 2, para obtener que
so(1, 2) = ω ∈ M3 (R) : ηω = −(ηω)T
Luego, si ω ∈ so(1, 2), tenemos que
0
ω12 ω13
0
ω23
ω = ω12
ω13 −ω23 0
Escribamos una matriz N ∈ sl(2, R) por N =
a b
c −a
con a, b y c números reales.
Definamos φ : sl(2, R) → so(1, 2) por
0
b + c 2a
a b
0
c − b
φ
= b + c
c −a
2a b − c
0
48
Esta expresión tan rebuscada para φ será más
natural
al ver la siguiente sección. Es claro
0
0
a
b
que φ es lineal. Además, si escribimos N 0 = 0
∈ sl(2, R), tenemos que,
c −a0
0
φ([N, N ]) = φ
bc0 + cb0
2(ab0 − ba0 )
2(ca0 − ac0 ) −(bc0 + cb0 )
0
ab0 − ba0 + ca0 − ac0
bc0 + cb0
0
−ab0 + ba0 + ca0 − ac0
= 2 ab0 − ba0 + ca0 − ac0
0
0
0
0
0
0
bc + cb
ab − ba − ca + ac
0
0
b + c 2a
0
b0 + c 0
2a0
0
0
0
0
c − b , b + c
0
c − b 0
= b + c
2a b − c
0
2a0
b0 − c 0
0
0
= [φ(N ), φ(N )]
por lo que φ preserva el corchete entre las álgebras. Ası́, φ es un isomorfismo de álgebras
de Lie.
II.2
El isomorfismo sl(2, C) ∼
= so(1, 3).
Sea x ∈ R4 . Consideremos la siguiente identificación
x0 + x3 x1 + x2 i
T
x = (x0 , x1 , x2 , x3 )
←→ X =
x 1 − x 2 i x0 − x 3
(II.3)
entre puntos de R4 y matrices 2 × 2, hermı́ticas, con entradas complejas. Recordemos que
una matriz es hermı́tica si es igual a su transpuesta conjugada. Denotemos al conjunto de
todas las matrices hermı́ticas, 2 × 2 y con entradas complejas, por h2 (C). Ası́, X ∈ h2 (C).
Notemos que
det(X) = −q(x) = −f (x, x)
por lo que estaremos interesados en preservar el determinante de X.
Sea M ∈ M2 (C), una matriz 2 × 2 con entradas complejas. Consideremos M actuando
hermı́ticamente sobre X mediante el siguiente mapa
X 7−→ M XM †
(II.4)
49
La razón de esto es que queremos que la imagen, X 0 = M XM † , siga siendo hermı́tica.
La matriz X 0 está relacionada con, digamos, x0 = (x00 , x01 , x02 , x03 )T ∈ R4 . Nos interesa
caracterizar a las matrices M , correspondientes a trasformaciones del tipo (II.4), que
preservan la forma bilineal de Lorentz. Es decir, ¿para cuáles matrices, M , se tiene que
f (x0 , x0 ) = f (x, x) con x0 relacionado a X 0 = M XM † ? Por tanto, queremos caracterizar a
las matrices que preservan el determinante al actuar hermı́ticamente. Luego,
det(X 0 ) = det(M XM † ) = det(M M † ) det(X) = k det(M )k2 det(X)
Sin embargo, como k det(eiθ M )k2 = k det M k2 para cualquier valor de θ, entonces basta
pedir det M = 1. Es decir, M ∈ SL(2, C) = {A ∈ M2 (C)
:
det A = 1}.
El grupo SL(2, C) es un subgrupo de Lie de GL(2, C) ya que el determinante es una
función continua y SL(2, C) = det−1 (1), por lo que es un subgrupo cerrado.
Tomemos una curva, M (t), en SL(2, C) que pase por la identidad en t = 0. Entonces,
det M (t) = 1 para todo t en un entorno del cero. Derivando ambos lados, respecto de la
variable t, obtenemos que
d
d
0=
det M (t) = Tr
M (t)
dt
dt
t=0
t=0
Ası́, los elementos del álgebra de Lie de SL(2, C) son matrices 2×2, con entradas complejas,
tales que su traza es igual a cero. Es decir,
sl(2, C) = {N ∈ M2 (C)
:
Tr N = 0}
(II.5)
y el corchete viene dado por el conmutador de matrices.
Recordemos que estamos pidiendo que las matrices M ∈ SL(2, C) actúen sobre X ∈ h2 (C)
como se muestra en la ecuación (II.4). Notemos que
d
d †
d
†
†
M (t)XM (t) =
M (t) XM (t) + M (t)X
M (t) dt
dt
dt
t=0
t=0
50
Por lo tanto, los elementos N ∈ sl(2, C) actúan sobre X ∈ h2 (C) de la siguiente manera,
d 0 †
(II.6)
X 7−→ N X + XN = X (t)
dt
t=0
y observemos que N X + XN † ∈ h2 (C).
Como Tr N = 0, para N ∈ sl(2, C), entonces N tiene la forma
α β
N=
γ −α
con α, β y γ números complejos. Escribámos α = α0 1+α1 i, β = β0 1+β1 i y γ = γ0 1+γ1 i.
Entonces, si X lo seguimos expresando como en la ecuación (II.3), tenemos que
d 0 X (t)
= N X + XN †
dt
t=0
α γ
α β
x0 + x3 x1 + x2 i
x0 + x3 x1 + x2 i
=
+
γ −α
x 1 − x 2 i x0 − x 3
x 1 − x 2 i x0 − x 3
β −α
0
0
0
0
x0 + x3 x1 + x2 i
=
x01 − x02 i x00 − x03
donde las entradas de dtd X 0 (t)t=0 vienen dadas por
x00 + x03 = 2α0 (x0 + x3 ) + 2β0 x1 + 2β1 x2
x01 + x02 i = (γ + β)x0 + (γ − β)x3 + (α − α)(x1 + x2 i)
x01 − x02 i = (γ + β)x0 + (γ − β)x3 + (α − α)(x1 − x2 i)
x00 − x03 = 2α0 (x3 − x0 ) + 2γ0 x1 − 2γ1 x2
Podemos manipular estas cuatro ecuaciones anteriores para obtener
x00 = (β0 + γ0 )x1 + (β1 − γ1 )x2 + 2α0 x3
(II.7)
x01 = (γ0 + β0 )x0 − 2α1 x2 + (γ0 − β0 )x3
(II.8)
x02 = (β1 − γ1 )x0 + 2α1 x1 − (β1 + γ1 )x3
(II.9)
x03 = 2α0 x0 + (β0 − γ0 )x1 + (β1 + γ1 )x2
(II.10)
51
Tenemos entonces que las matrices N ∈ sl(2, C) mandan a X en un vector tangente
d
0
, matrices en h2 (C), de acuerdo con la ecuación (II.6). Identificando X con el
X
(t)
dt
t=0
punto x y dtd X 0 (t)t=0 con x0 , recordando (II.3), notemos que las ecuaciones (II.7), (II.8),
(II.9) y (II.10) se pueden representar de la siguiente manera
0
0
β0 + γ0 β1 − γ1
2α0
x0
x0
x01 γ0 + β0
0
−2α1
γ0 − β0 x1
0 =
x2 β1 − γ1
2α1
0
−β1 − γ1 x2
x03
2α0
β0 − γ0 β1 + γ1
0
x3
(II.11)
Por otro lado, recordemos la caracterización dada en (II.2) para obtener que
so(1, 3) = ω ∈ M4 (R)
:
ηω = −(ηω)T
Luego, dada ω ∈ so(1, 3), ella tiene la forma
0
ω12
ω13 ω14
ω12
0
ω23 ω24
ω=
ω13 −ω23
0
ω34
ω14 −ω24 −ω34 0
(II.12)
ya que ηω = −(ηω)T .
Además, si Λ(t) es una curva en SO(1, 3), que pasa por la identidad en t = 0, entonces
Λ(t)x = x0 (t) y, derivando ambos lados respecto de t, obtenemos que ωx = dtd x0 (t)t=0 ,
donde hemos denotado por ω a dtd Λ(t)t=0 .
Notemos la similitud entre la matriz cuadrada que aparece en la ecuación (II.11) y la
caracterización de ω en (II.12). Esto nos induce a identificar dtd X 0 (t)t=0 con dtd x0 (t)t=0 .
Definamos ϕ : sl(2, C) → so(1, 3) dada por
0
β0 + γ0 β1 − γ1
2α0
γ0 + β0
α β
0
−2α1
γ0 − β0
ϕ
=
β1 − γ1
γ −α
2α1
0
−β1 − γ1
2α0
β0 − γ0 β1 + γ1
0
52
donde α = α0 1 + α1 i, β = β0 1 + β1 i y γ = γ0 1 + γ1 i. Es claro que ϕ es lineal. Recordemos que el corchete tanto
3) viene dado por el conmutador de
en sl(2,
C) como
0en so(1,
0
α β
α
β
, entonces
matrices. Ası́, si N =
y N0 =
γ 0 −α0
γ −α
0
ϕ ([N, N ]) = ϕ
βγ 0 − β 0 γ
2(αβ 0 − βα0 )
2(γα0 − αγ 0 )
γβ 0 − βγ 0
0
α0 β00 − α1 β10
−β0 α00 + β1 α10
+γ α0 − γ α0
0 0
1 1
0
−α0 γ0 + α1 γ10
= 2
α β0 + α β0
0 1
0 0
−β0 α10 − β1 α00
−γ0 α0 − γ1 α0
1
0
α0 γ10 + α1 γ00
β γ0 − β γ0
0 0
1 1
0
−γ0 β0 + γ1 β10
α0 β00 − α1 β10
−β0 α00 + β1 α10
+γ0 α00 − γ1 α10
−α0 γ00 + α1 γ10
α0 β10 + α0 β00
−β0 α10 − β1 α00
−γ0 α10 − γ1 α00
α0 γ10 + α1 γ00
0
−β0 γ10 − β1 γ00
+γ0 β10 + γ1 β00
β0 γ10 + β1 γ00
−γ0 β10 − γ1 β00
0
α0 β00 − α1 β10
−β0 α00 + β1 α10
−γ0 α00 + γ1 α10
+α0 γ00 − α1 γ10
α0 β10 + α1 β00
−β0 α10 − β1 α00
+γ0 α10 + γ1 α00
−α0 γ10 − α1 γ00
β0 γ00 − β1 γ10
0
0
−γ0 β0 + γ1 β1
−α0 β00 + α1 β10
+β0 α00 − β1 α10
+γ0 α00 − γ1 α10
0
0
−α0 γ0 + α1 γ1
−α0 β10 − α1 β00
β0 α10 + β1 α00
−γ0 α10 − γ1 α00
α0 γ10 + α1 γ00
0
= [ϕ(N ), ϕ(N 0 )]
Por lo que ϕ : sl(2, C) → so(1, 3) preserva el corchete y, por lo tanto, es un isomorfismo
de álgebras de Lie.
53
II.3
El isomorfismo sl(2, H) ∼
= so(1, 5).
Para poder pasar a los cuaterniones es importante ser estricto en las reglas de multiplicación. Es decir, si A = (a)ij y B = (b)ij son dos matrices cuadradas 2 × 2 con entradas
cuaterniónicas, es decir, pertenecientes a M2 (H), entonces
a11 a12
a21 a22
b11 b12
a11 b11 + a12 b21 a11 b12 + a12 b22
:=
b21 b22
a21 b11 + a22 b21 a21 b12 + a22 b22
en ese orden, ya que, en general,
a11 b11 + a12 b21 6= b11 a11 + a12 b21 6= b11 a11 + b21 a12 6= a11 b11 + b21 a12
y lo mismo sucede con las otras entradas de la definición del producto de las matrices.
Habiendo superado este detalle, si intentamos definir sl(2, H) de manera análoga al caso
sobre los complejos, ver (II.5), encontramos que no hay cerradura bajo el corchete. En
efecto,
a11 b11 + a12 b21 a11 b12 + a12 b22
a21 b11 + a22 b21 a21 b12 + a22 b22
a11 b11 + a12 b21 − b11 a11 − b12 a21
a21 b11 + a22 b21 − b21 a11 − b22 a21
[A, B] =
=
b11 a11 + b12 a21 b11 a12 + b12 a22
−
b21 a11 + b22 a21 b21 a12 + b22 a22
a11 b12 + a12 b22 − b11 a12 − b12 a22
a21 b12 + a22 b22 − b21 a12 − b22 a22
de donde se desprende que
Tr [A, B] = [a11 , b11 ] + [a22 , b22 ] + [a12 , b21 ] + [a21 , b12 ]
(II.13)
Usando que Tr A = Tr B = 0 no se obtiene que Tr [A, B] sea cero.
Este problema para definir sl(2, H) está relacionado con otro problema, la definición de
SL(2, H). Notemos que la condición natural sobre los elementos en SL(2, H) es que tengan su determinante igual a 1. Sin embargo, ¿cómo podemos obtener un determinante
para matrices con entradas cuaterniónicas que esté bién definido?
2
2
Una solución está en
En el libro de Richard Pierce, Associative Algebras (ver [23], en la página 308), encontramos una
definición, general, para el determinante de una matriz n × n con entradas en un álgebra de división
asociativa. A pesar de que tal definición no será usada en este trabajo, se menciona como referencia para
los lectores interesados.
54
restringirse a la parte real. Notemos que,
detR A := Re(det A) = Re(a11 a22 − a12 a21 )
está bién definido ya que, al intercambiar el orden de cualquiera de los elementos que están
bajo multiplicación, siempre se obtiene el mismo resultado. Sin embargo, no es cierto que
detR (AB) = (detR A)(detR B) para cualesquiera A, B ∈ M2 (H). Es por ello que, como se
verá más adelante, tomaremos otra definición para SL(2, H).
Para simplificar la notación, denotemos por TrR a la parte real de la Traza. Definamos,
entonces,
sl(2, H) = {N ∈ M2 (H)
:
TrR N = 0}
con el corchete dado por el conmutador de matrices. Recordemos que el conmutador de
dos cuaterniones siempre tiene parte real igual a cero, ver la ecuación (I.3). En vista de
esto, tomando parte real de ambos lados de la ecuación (II.13), sı́ obtenemos cerradura
bajo el corchete con esta definición para sl(2, H). Como el conmutador de matrices es
antisimétrico y el producto de matrices, aún con entradas cuaterniónicas, es asociativo se
tiene que el corchete, ası́ definido, es antisimétrico y satisface la identidad de Jacobi. Por
lo tanto, sl(2, H) es un álgebra de Lie.
Sea, ahora, x ∈ R6 . Consideremos, de manera análoga al caso de los números complejos,
la siguiente identificación
T
x = (x0 , x1 , x2 , x3 , x4 , x5 )
←→
X=
x0 + x5
x1 + x2 i + x3 j + x4 k
x1 − x2 i − x3 j − x4 k
x 0 − x5
entre puntos de R6 y matrices hermı́ticas, 2 × 2, con entradas cuaterniónicas. Igual que
antes, el determinante de una matriz en h2 (H) está bién definido y,
det(X) = −q(x) = −f (x, x)
por lo que estaremos interesados en preservar el determinante de X.
55
Dada un matriz M ∈ M2 (H), consideremos M actuando hermı́ticamente sobre X como
sigue
X−
7 → M XM †
(II.14)
a b
Sea X 0 = M XM † y escribamos M =
, con a, b, c, d ∈ H. A pesar de no contar
c d
con las propiedades usuales del determinante de un producto de matrices, sı́ se tiene lo
siguiente
det X 0 = det M XM †
kak2 kdk2 + kbk2 kck2 − 2Re acdb
= det M M † det X
=
det X
donde el determinante de M M † está bién definido ya que es hermı́tica. Estamos, entonces,
interesados en las matrices M tales que det M M † = 1.
Consideremos la siguiente definición
SL(2, H) = A ∈ M2 (H)
:
det AA† = 1
Si A, B ∈ SL(2, H) entonces el producto AB también está en SL(2, H) ya que
det AB(AB)† = det A(BB † )A† = det AA† det BB † = 1
†
Además, reemplazando B por A−1 tenemos que det A−1 A−1 = 1, si A ∈ SL(2, H). Ası́,
SL(2, H) es un subgrupo de M2 (H) y, por lo tanto, un grupo de Lie.
Sea M (t) una curva en SL(2, H) que pasa por la identidad en t = 0. Entonces, se tiene
det M (t)M † (t) = 1 para todo t en un entorno del cero. Derivando ambos lados respecto
de t obtenemos que
Tr
d †
d
†
M (t) M (t) + M (t)
M (t) = 0
dt
dt
t=0
de donde se desprende que
d
d
d † 2TrR
M (t)
= Tr
M (t) + M (t)
=0
dt
dt
dt
t= 0
t=0
t=0
56
siendo esto consistente con la definición antes dada para sl(2, H).
Dado que estamos pidiendo que las matrices M ∈ SL(2, H) actúen hermı́ticamente sobre
X, según la ecuación (II.14), entonces, tomando una curva que pase por la identidad y
derivando para determinar la manera como los elementos en el espacio tangente sobre la
identidad actúan, obtenemos que las matrices N ∈ sl(2, H) transforman X en un vector
tangente, según
d 0 X−
7 → N X + XN = X (t)
dt
t=0
†
(II.15)
α β
Escribamos N =
con α, β, γ, δ ∈ H. Como TrR N = 0, se tiene entonces que
γ δ
Re(α) = −Re(δ). Luego, si dtd X 0 (t)t=0 = N X + XN † y escribimos
d 0 x01 + x02 i + x03 j + x04 k
x00 + x05
X (t) =
x00 − x05
x01 − x02 i − x03 j − x04 k
dt
t=0
tenemos que
x00 = (β0 + γ0 )x1 + (β1 − γ1 )x2 + (β2 − γ2 )x3 + (β3 − γ3 )x4 + 2α0 x5
(II.16)
x01 = (β0 + γ0 )x0 + (δ1 − α1 )x2 + (δ2 − γ2 )x3 + (δ3 − α3 )x4 + (γ0 − β0 )x5 (II.17)
x02 = (β1 − γ1 )x0 + (α1 − δ1 )x1 − (α3 + δ3 )x3 + (α2 + δ2 )x4 − (β1 + γ1 )x5 (II.18)
x03 = (β2 − γ2 )x0 + (α2 − δ2 )x1 + (α3 + δ3 )x2 − (α1 + δ1 )x4 − (β2 + γ2 )x5 (II.19)
x04 = (β3 − γ3 )x0 + (α3 − δ3 )x1 − (α2 + δ2 )x2 + (α1 + δ1 )x3 − (β3 + γ3 )x5 (II.20)
x05 = 2α0 x0 + (β0 − γ0 )x1 + (β1 + γ1 )x2 + (β2 + γ2 )x3 + (β3 + γ3 )x4
(II.21)
donde hemos escrito α = α0 1 + α1 i + α2 j + α3 k, β = β0 1 + β1 i + β2 j + β3 k,
γ = γ0 1 + γ1 i + γ2 j + γ3 k y δ = −α0 1 + δ1 i + δ2 j + δ3 k. Las ecuaciones (II.16), (II.17),
(II.18), (II.19), (II.20) y (II.21), provenientes de la acción descrita en (II.15), se pueden
representar de la siguiente manera
57
0
x0
0
x01 β0 + γ0
0
x2 β1 − γ1
0 =
x3 β2 − γ2
0
x4 β3 − γ3
x05
2α0
β0 + γ0
β1 − γ1
β2 − γ2
β3 − γ3
2α0
x0
0
δ1 − α1
δ2 − γ2
δ3 − α3
γ0 − β0 x1
x 2
α1 − δ1
0
−(α3 + δ3 )
α2 + δ2
−(β1 + γ1 )
α2 − δ2
α3 + δ3
0
−(α1 + δ1 ) −(β2 + γ2 )
x 3
α3 − δ3 −(α2 + δ2 )
α1 + δ1
0
−(β3 + γ3 ) x4
β0 − γ0
β1 + γ1
β2 + γ2
β3 + γ3
0
x5
(II.22)
Por otro lado, recordando la caracterización dada en (II.2),
so(1, 5) = ω ∈ M6 (R)
:
ηω = −(ηω)T
Luego, si ω ∈ so(1, 5), se tiene que
0
ω12
ω13
ω14
ω15
ω12
0
ω23
ω24
ω25
ω13 −ω23
0
ω
ω
34
35
ω=
ω14 −ω24 −ω34
0
ω
45
ω15 −ω25 −ω35 −ω45
0
ω16 −ω26 −ω36 −ω46 −ω56
ω16
ω26
ω36
ω46
ω56
0
(II.23)
ya que ηω = −(ηω)T . Además, análogamente al caso complejo, si Λ(t) es una curva en
SO(1, 5), que pasa por la identidad en t = 0, entonces Λ(t)x = x0 (t) y, derivando de
ambos lados respecto de t, obtenemos que ωx = dtd x0 (t)t=0 , donde hemos denotado por ω
a dtd Λ(t)t=0 . Esto nos induce a identificar X 0 (t)|t=0 con x0 (t)|t=0 .
Notemos la similitud entre las transformaciones inducidas por las matrices en (II.22) y
(II.23). De hecho, definamos ψ : sl(2, H) → so(1, 5) dada por
0
β0 + γ0
β1 − γ1
β2 − γ2
β3 − γ3
2α0
0
δ1 − α1
δ2 − γ2
δ3 − α3
γ0 − β0
β0 + γ0
β1 − γ1 α1 − δ1
α β
0
−(α
+
δ
)
α
+
δ
−(β
+
γ
)
3
3
2
2
1
1
ψ
=
β2 − γ2 α2 − δ2
γ δ
α3 + δ3
0
−(α1 + δ1 ) −(β2 + γ2 )
β3 − γ3 α3 − δ3 −(α2 + δ2 )
α1 + δ1
0
−(β3 + γ3 )
2α0
β0 − γ0
β1 + γ1
β2 + γ2
β3 + γ3
0
donde α = α0 1 + α1 i + α2 j + α3 k, β = β0 1 + β1 i + β2 j + β3 k, γ = γ0 1 + γ1 i + γ2 j + γ3 k
y δ = −α0 1 + δ1 i + δ2 j + δ3 k (ya que Re(α) = −Re(δ)). Recordemos que el corchete
58
en ambas álgebras viene dado por el conmutador de matrices. ψ es lineal y, además,
preserva el corchete entre las álgebras de Lie. Una cuenta, que hemos decidido omitir de
esta exposición por razones de espacio pero que es similar a la que encontramos en la
página 52, verifica esta última afirmación. Ası́, ψ es un isomorfismo de álgebras de Lie
II.4
El isomorfismo sl(2, O) ∼
= so(1, 9).
En general, y recordando la sección anterior, es necesario pedir que la parte real de la
traza sea cero para obtener cerradura bajo el conmutador de matrices 2 × 2 con entradas
en un álgebra de división que no es conmutativa. Sin embargo, la no asociatividad de
los octoniones no permite que se satisfaga la identidad de Jacobi si quisieramos definir a
sl(2, O) de manera análoga a como se definió sl(2, H), en la sección anterior.
En las publicaciones de A. Sudbery (ver [18], [19] y [24]) se encuentra una manera de
extender la definición de sl(2, K) para cualquier álgebra de división K, lo cual se mostrará a
continuación.
Un álgebra de Jordan es un álgebra conmutativa tal que
x ◦ (y ◦ x2 ) = (x ◦ y) ◦ x2
para todo x e y en el álgebra, donde ◦ denota la operación de multiplicación en el álgebra
de Jordan. Esta condición es equivalente a decir que
x, y, x2 = 0
para todo x e y en el álgebra, donde [ , , ] denota el asociador, definido en (I.5).
Una derivación, D, sobre un álgebra es una transformación lineal tal que
D(xy) = (Dx)y + x(Dy)
(II.24)
59
para todo x e y en el álgebra. Denotaremos por Der(V ) al álgebra de Lie de todas las
derivaciones sobre V , con el corchete dado por el conmutador. Notemos que Der(V ) es el
álgebra de Lie del grupo de automorfismos de V .
A. Sudbery define el álgebra de estructura de un álgebra de Jordan, J, como la subálgebra de Lie de gl(J) generada por las multiplicaciones de Jordan, Lx (y) = x ◦ y. Como las
álgebras de Jordan son conmutativas, se tiene que Lx (y) = x ◦ y = y ◦ x = Rx (y), por lo
que basta considerar sólo los mapas Lx . Denotaremos por L(J) al conjunto de todos los
mapas Lx , con x ∈ J, y al álgebra de estructura de J por Str(J). Esta álgebra también
se llama álgebra multiplicativa de Lie, ver [3].
Queremos ver que [Lx , Ly ] es una derivación sobre J. Para eso, recordemos la ecuación (II.24) que caracteriza al álgebra de Jordan. Cambiando x por x + λb, con λ un
escalar y b otro elemento en J, obtenemos que
0 =
=
=
=
=
x + λb, y, (x + λb)2
x + λb, y, x2 + λ(x ◦ b + b ◦ x) + λ2 b2
x + λb, y, x2 + 2λ(x ◦ b) + λ2 b2
x, y, x2 + λ 2 [x, y, x ◦ b] + b, y, x2
+λ2 2 [b, y, b ◦ x] + x, y, b2 + λ3 b, y, b2
λ 2 [x, y, x ◦ b] + b, y, x2 + λ2 2 [b, y, b ◦ x] + x, y, b2
de donde se desprende que
2 [x, y, x ◦ b] + b, y, x2 = 0
(II.25)
para cualesquiera b, x e y en J. Si volvemos a linearizar, pero esta vez cambiado a x por
x + λa en la ecuación (II.25), obtenemos que
60
0 = 2 [x + λa, y, (x + λa) ◦ b] + b, y, (x + λa)2
= 2 [x, y, x ◦ b] + b, y, x2
+2λ ([x, y, a ◦ b] + [a, y, x ◦ b] + [b, y, x ◦ a])
+λ2 2 [a, y, a ◦ b] + b, y, a2
= 2λ ([x, y, a ◦ b] + [a, y, x ◦ b] + [b, y, x ◦ a])
de donde se desprende que
[x, y, a ◦ b] + [a, y, x ◦ b] + [b, y, x ◦ a] = 0
(II.26)
para cualesquiera a, b, x e y en J.
La ecuación (II.26) es equivalente a la siguiente ecuación
(x◦y)◦(a◦b)−x◦(y◦(a◦b))+(a◦y)◦(x◦b)−a◦(y◦(x◦b))+(b◦y)◦(x◦a)−b◦(y◦(x◦a)) = 0
(II.27)
Cambiando a x con y en la ecuación (II.27) obtenemos
(y◦x)◦(a◦b)−y◦(x◦(a◦b))+(a◦x)◦(y◦b)−a◦(x◦(y◦b))+(b◦x)◦(y◦a)−b◦(x◦(y◦a)) = 0
(II.28)
Finalmente, restando las ecuaciones (II.27) y (II.28), y usando que el álgebra de Jordan,
J, es conmutativa, se obtiene que
x◦(y ◦(a◦b))−y ◦(x◦(a◦b)) = a◦(x◦(y ◦b))−a◦(y ◦(x◦b))+(x◦(y ◦a))◦b−(y ◦(x◦a))◦b
(II.29)
La ecuación (II.29) es equivalente a
[Lx , Ly ] (a ◦ b) = a ◦ ([Lx , Ly ] b) + ([Lx , Ly ] a) ◦ b
(II.30)
notando que [Lx , Ly ] (·) = Lx Ly (·) − Ly Lx (·) = x ◦ (y ◦ (·)) − y ◦ (x ◦ (·)). Ası́, [Lx , Ly ] es
una derivación sobre J. Es decir, [Lx , Ly ] ∈ Der(J).
61
Para cualquier álgebra de Jordan. J, de dimensión finita existe un único ideal3 maximal
nilpotente, R, llamado el radical de J. Se dirá que J es semisimple si R = 0. Se dice que
una derivación es interna4 si pertenece al álgebra de estructura (álgebra multiplicativa
de Lie). Como es usual, diremos que un ideal es simple si no posee ideales propios.
En el libro de R. Schafer, ver [3] encontramos los siguientes resultados (en las páginas 98,
99 y 22, respectı́vamente)
• Cualquier álgebra semisimple de Jordan (de dimensión finita) sobre un cuerpo de
caracterı́stica cero se expresa (de manera única) como suma directa de ideales simples.
• Cualquier álgebra semisimple de Jordan, distinta del cero, de dimensión finita sobre
un cuerpo de caracterı́stica cero posee un elemento unidad.
• En un álgebra de dimensión finita, sobre un cuerpo de caracterı́stica cero, que es
suma directa de ideales simples y posee una identidad a izquierda o a derecha, se
tiene que toda derivación es interna.
En resumen, toda derivación de un álgebra semisimple de Jordan de dimensión finita sobre
un cuerpo de caracterśtica cero es interna.
Si J posee un elemento identidad (por ejemplo, si J es semisimple) el cual denotaremos,
como es usual, por 1, entonces
Lx (1) = Lx (1 ◦ 1) = Lx (1) ◦ 1 + 1 ◦ Lx (1) = 2Lx (1)
de donde se tiene que x = Lx (1) = 0, lo cual implica que Lx ≡ 0 si Lx ∈ Der(J). Ası́,
tenemos que el álgebra de estructura se expresa como
Str(J) = Der(J) ⊕ L(J)
3
(II.31)
Un ideal, I ⊂ J, de un álgebra de Jordan, es una subálgebra tal que si a ∈ I entonces a ◦ b ∈ I para
todo b ∈ J.
4
Esta definición es válida para álgebras de Lie, álgebras no asociativas y también para álgebras asociativas con identidad a izquierda o a derecha.
62
para cualquier álgebra semisimple de Jordan de dimensión finita sobre un cuerpo de caracterı́stica cero. El sı́mbolo ⊕ se usará para denotar suma directa de espacios vectoriales,
no necesariamente suma directa de álgebras de Lie.
Para un álgebra cualquiera, se define el centro como el conjunto de todos los elementos
que conmutan y se asocian con cualesquiera otros elementos en el álgebra. Es decir, el
elemento c pertenece al centro de un álgebra si [c, a] = 0 y [c, a, b] = [a, c, b] = [a, b, c] = 0
para todo a y b en el álgebra.
Los múltiplos de la identidad en L(J) pertenecen al centro de Str(J). Se define entonces
el álgebra de estructura reducida, Str0 (J), por el álgebra de estructura módulo los
multiplos de la identidad en L(J).
Para cualquier álgebra de división normada, K, podemos hacer del conjunto de las matrices 2 × 2 hermı́ticas con entradas en K, h2 (K), un álgebra de Jordan con el producto
dado por
1
X ◦ Y = (XY + Y X)
2
para X, Y ∈ h2 (K). Además, h2 (K) es semisimple ya que X ◦ Y = 0 para todo X implica
que Y es la matriz cero.
Para poder caracterizar a Str (h2 (K)) es necesario estudiar primero a Der (h2 (K)). Si
X, Y ∈ h2 (K) entonces la siguiente identidad
[A, {X, Y }] = {[A, X] , Y } + {X, [A, Y ]}
vale para cualquier matriz A de tamaño 2 × 2, donde { , } representa el anti-conmutador.
Es decir, {A, B} = AB + BA. Sin embargo, para que [A, {X, Y }] ∈ h2 (K) es necesario
que A sea anti-hermı́tica, es decir, A ∈ A2 (K) = {X ∈ M2 (K) : X = −X † }, donde
M2 (K) denota las matrices cuadradas 2 × 2 con entradas en K. Por lo tanto, observando
que X ◦ Y = 21 {X, Y }, se tiene que, la representación adjunta, ad A(X) = [A, X] es una
63
derivación de Jordan sobre h2 (K). Además, las derivaciones de K son derivaciones de
h2 (K), actuando sobre las entradas de las matrices en h2 (K). Ası́
Der (h2 (K)) = ad A2 (K) + Der(K)
(II.32)
donde ad A2 (K) es el álgebra de Lie generada por las representaciones adjuntas, ad A(X)
con A ∈ A2 (K) actuando sobre X ∈ h2 (K). El álgebra de Lie Der (h2 (K)) es, como
espacio vectorial, la suma de los espacios vectoriales ad A2 (K) y Der(K). Sin embargo,
como álgebra de Lie, no es la suma directa de estas álgebras ya que el corchete entre
ellas viene dado por la acción del elemento en Der(K) sobre las entradas del elemento en
ad A2 (K), el cual no necesariamente es cero.
En lo que sigue, el sı́mbolo prima (0 ) asociado a un conjunto de matrices representa el
mismo conjunto de matrices pero con la condición adicional que sus elementos tengan
traza igual a cero. Por otro lado, el sı́mbolo prima (0 ) asociado a un álgebra de división
normada representa el subconjunto de los elementos con parte real igual a cero. Es decir,
Mn0 (K) = {X ∈ Mn (K) : Tr (X) = 0} y K0 = {x ∈ K : Re (x) = 0}.
Podemos descomponer el espacio A2 (K) como A2 (K) = A02 (K)⊕K0 I, donde K0 I representa
el subespacio de los múltiplos de la identidad por elementos en K0 . Para a ∈ K0 , ad (aI)
actúa sobre h2 (K) como el mapa Ca = La − Ra (es decir, Ca (x) = ax − xa) sobre cada
entrada de las matrices en h2 (K). Denotemos al conjunto de todos los mapas conmutadores
por C(K0 ) = {Ca : a ∈ K0 }. Entonces, ad (K0 I) = C(K0 ). Además, se puede verificar que
ad A02 (K) = A02 (K). Ası́, podemos reescribir la ecuación (II.32) como
Der (h2 (K)) = A02 (K) + C(K0 ) + Der(K)
(II.33)
Por otro lado, denotaremos por so(n) al álgebra de Lie de matrices anti-simétricas, de
tamaño n × n con entradas reales. Si V es un espacio vectorial real dotado de una for-
64
ma bilineal simétrica, f , denotaremos por SO(V ) al grupo de endomorfismos de V que
preservan la forma bilineal f . El álgebra de Lie de SO(V ) la denotaremos por so(V ), es
decir, so(V ) es el álgebra de Lie de endomorfismos anti-simétricos de V , respecto a la
forma bilineal simética f .
Para cualquier álgebra de división normada, K, se tiene que toda derivación sobre K es
interna (ver [3], en la página 87). Las derivaciones y las multiplicaciones por la izquierda
o la derecha con elementos en K0 generan todos los mapas anti-simétricos de K. Ası́
so(K) = Der(K) + L(K0 ) + R(K0 )
donde L(K0 ) y R(K0 ) denotan los conjuntos de todos los mapas La y Ra , respectivamente,
con a ∈ K0 . El corchete se define, como es usual, mediante el conmutador salvo entre los
mapas de multiplicación y las derivaciones. Si D ∈ Der(K), La ∈ L(K0 ) y Rb ∈ R(K0 )
entonces
[D, La ] = LD(a) ,
[D, Ra ] = RD(a)
y el resto de los corchetes son dados por el conmutador. Si restringimos el espacio a K0
entonces los mapas anti-simétricos se obtienen restringiendo los mapas de multiplicaciones
a mapas conmutadores. Es decir,
so(K0 ) = Der(K) + C(K0 )
(II.34)
Luego, en virtud de las ecuaciones (II.33) y (II.34), tenemos que
Der (h2 (K)) = A02 (K) ⊕ so(K0 )
(II.35)
Finalmente, recordando la expresión del álgebra de estructura para cualquier algebra
semisimple de Jordan (ecuación (II.31)) y usando (II.35) se tiene que
Str (h2 (K)) ∼
= A02 (K) ⊕ so(K0 ) ⊕ h2 (K)
Si cancelamos los múltiplos de la identidad en h2 (K), entonces
Str0 (h2 (K)) ∼
= A02 (K) ⊕ so(K0 ) ⊕ h02 (K)
∼
= M20 (K) ⊕ so(K0 )
(II.36)
65
ya que M20 (K) = A02 (K) ⊕ h02 (K).
Queremos dar un corchete en Str0 (h2 (K)) ∼
= M20 (K) ⊕ so(K0 ). Notemos primero que si K
es R o C entonces Str0 (h2 (K)) se reduce a M20 (K), ya que estas dos álgebras de división
normadas son conmutativas y sus grupos de automorfismos son discretos. Como queremos
que Str0 (h2 (K)) extienda la definición de sl(2, K), para que Str0 (h2 (R)) y Str0 (h2 (C))
coincidan con sl(2, R) y sl(2, C), respectivamente, es necesario definir el corchete de Lie
en la parte matricial de Str0 (h2 (K)) mediante el conmutador. Considerando las otras dos
álgebras de división normadas, tenemos que
so(H0 ) ∼
= so(3)
so(O0 ) ∼
= C(O0 ) ⊕ g2
donde g2 ∼
= Der(O) es el álgebra de Lie de G2 ∼
= Aut(O).
Veamos, primero, qué pasa en el caso de los octoniones. Escogemos a los octoniones porque
es en este caso cuando se abarcan y separan los tres términos en Str0 (h2 (K)). Tenemos
entonces
Str0 (h2 (O)) ∼
= M20 (O) ⊕ C(O0 ) ⊕ Der(O)
recordando que ⊕ representa la suma directa de espacios vectoriales, no necesariamente
de álgebras de Lie. Definiremos en Str0 (h2 (O)) el corchete de Lie identificando, apropiadamente, los generadores de Str0 (h2 (O)) con los generadores de so(1, 9) y dando a
Str0 (h2 (O)) un corchete de modo que tal identificación sea un isomorfismo de álgebras
de Lie.
Sean a, b, c ∈ O, d ∈ O0 y g ∈ Der(O). Como Der(O) es el álgebra de Lie de Aut(O),
podemos expresar a g como combinación lineal sobre los generadores infinitesimales que
se encuentran en la tabla I.4. Luego, un elemento genérico en Str0 (h2 (O)) se escribe de
66
la forma
14
X
a b
+ Cd +
λi gi
c −a
i=1
donde los gi son los generadores infinitesimales de g2 y los λi son reales.
Queremos que la parte matricial
actúe de igualmanera que en las secciones
anteriores.
x0 + x9
x
a b
Es decir, si escribimos X =
∈ h2 (O) y N =
∈ M20 (O)
x̄
x0 − x9
c −a
queremos que N actúe hermı́ticamente sobre X. Ası́,
0
x0 + x09
x0
†
0
X 7−→ N X + XN = X =
x̄0
x00 − x09
Considerando a =
P7
i=0
ai ei , b =
P7
i=0 bi
ei y c =
P7
i=0 ci
ei , tenemos que esta acción
corresponde a la siguiente transformación
0
b0 + c 0 b1 − c 1 b2 − c 2 b3 − c 3 b4 − c4 b5 − c 5 b6 − c 6 b7 − c 7
b0 + c 0
0
−2a1
−2a2
−2a3
−2a4
−2a5
−2a6
−2a7
b 1 − c 1
2a
0
0
0
0
0
0
0
1
b 2 − c 2
2a2
0
0
0
0
0
0
0
b 3 − c 3
2a3
0
0
0
0
0
0
0
b 4 − c 4
2a
0
0
0
0
0
0
0
4
b 5 − c 5
2a5
0
0
0
0
0
0
0
b 6 − c 6
2a6
0
0
0
0
0
0
0
b 7 − c 7
2a7
0
0
0
0
0
0
0
2a0
b0 − c 0 b1 + c 1 b2 + c2 b3 + c 3 b4 + c 4 b+ c 5 b6 + c 6 b7 + c 7
2a0
c 0 − b0
−(c1 + b1 )
−(c2 + b2 )
−(c3 + b3 )
−(c4 + b4 )
−(c5 + b5 )
−(c6 + b6 )
−(c7 + b7 )
0
(II.37)
perteneciente a so(1, 9).
Si pedimos que Cd ∈ C(O0 ) y g ∈ Der(O) actúen sobre las entradas de las matrices en
h2 (O) entonces,
• escribiendo d = 0 1 + d1 e1 + · · · + d7 e7 , Cd (X) corresponde a la siguiente transfor-
67
mación
2
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0 −d4 −d7
d2 −d6
d5
d3
0
d4
0 −d5 −d1
d3 −d7
d6
0
d7
d5
0 −d6 −d2
d4 −d1
0 −d2
d1
d6
0 −d7 −d3
d5
0
d6 −d3
d2
d7
0 −d1 −d4
0 −d5
d7 −d4
d3
d1
0 −d2
0 −d3 −d6
d1 −d5
d4
d2
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
(II.38)
en so(1, 9), y
• g(X) corresponde a la transformación
0 0 0 0 0
0 0 0 0 0
0 0
0 0
0 0
0 0
←
0 0
0 0
0 0
0 0 0 0 0
0
0
0
0
↑
g
↓
→
0
0
0
0
0
0 0
0 0
0
0
0
0
0
0
0
0 0
(II.39)
donde en el cuadro escribimos la representación matricial de g dentro de so(7).
Identificamos, entonces, a Str0 (h2 (O)) ∼
= M20 (O) ⊕ C(O0 ) ⊕ Der(O) con so(1, 9) de la
siguiente manera:
P7
P7
P7
• Escribimos
a
=
a
e
,
b
=
b
e
y
c
=
i
i
i
i
i=0
i=0
i=0 ci ei para identificar a la matriz
a b
con la matriz que aparece en (II.37).
c −a
• Escribimos d = 0 1 + d1 e1 + · · · + d7 e7 e identificamos al mapa Cd con la matriz que
aparece en (II.38).
• Como Der(O) ⊂ so(7), identificamos a g ∈ Der con su representación matricial
dentro de so(7) y la escribimos de igual manera que como en (II.39).
68
Ası́, definimos el corchete de Lie en Str0 (h2 (O)) de la siguiente manera:
• el corchete tanto en C(O0 ) como en Der(O) viene dado por el conmutador
• el corchete entre Cd ∈ C(O0 ) y g ∈ Der(O) viene dado por [g, Cd ] = Cg(d) .
• el corchete entre elementos en so(O0 ) ∼
= C(O0 ) ⊕ Der(O) y matrices en M20 (O) viene
dado por la acción del elemento en so(O0 ) sobre las entradas de la matriz en M20 (O)
a b
w y
• finalmente, el corchete entre dos matrices N =
y M =
en
c −a
z −w
M20 (O) viene dado por
1
[N, M ] = N M − M N − Tr (N M − M N ) I + Cd + g
(II.40)
2
P
donde I es la matriz identidad 2 × 2, d = 21 Tr (N M − M N ) y g = 14
i=1 λi gi viene
determinado por
g1
g2
g3
g4
g5
g6
g7
= S12 − S47
= S12 + S56
= S13 + S57
= S14 + S27
= S15 − S37
= S16 + S25
= S17 + S35
g8
g9
g10
g11
g12
g13
g14
= S23 − S45
= S24 + S35
= S25 − S34
= S26 − S37
= S27 + S36
= S45 + S67
= S46 − S57
recordando que,
Sij (·) = Re(ej ·)ei − Re(ei ·)ej
y los coeficientes λi son los siguientes
λ1 = −2a2 w3 + 2a3 w2 − b2 z3 + b3 z2 − c2 y3 + c3 y2
−2a6 w1 + 2a1 w6 − b6 z1 + b1 z6 − c6 y1 + c1 y6
λ2 = −2a2 w4 + 2a4 w2 − b2 z4 + b4 z2 − c2 y4 + c4 y2
−2a3 w7 + 2a7 w3 − b3 z7 + b7 z3 − c3 y7 + c7 y3
λ3 = −2a4 w5 + 2a5 w4 − b4 z5 + b5 z4 − c4 y5 + c5 y4
−2a2 w6 + 2a6 w2 − b2 z6 + b6 z2 − c2 y6 + c6 y2
69
λ4 = −2a7 w6 + 2a6 w7 − b7 z6 + b6 z7 − c7 y6 + c6 y7
−2a5 w3 + 2a3 w5 − b5 z3 + b3 z5 − c5 y3 + c3 y5
λ5 = −2a7 w2 + 2a2 w7 − b7 z2 + b2 z7 − c7 y2 + c2 y7
−2a3 w4 + 2a4 w3 − b3 z4 + b4 z3 − c3 y4 + c4 y3
λ6 = −2a3 w2 + 2a2 w3 − b3 z2 + b2 z3 − c3 y2 + c2 y3
−2a4 w7 + 2a7 w4 − b4 z7 + b7 z4 − c4 y7 + c7 y4
λ7 = −2a2 w5 + 2a5 w2 − b2 z5 + b5 z2 − c2 y5 + c5 y2
−2a6 w4 + 2a4 w6 − b6 z4 + b4 z6 − c6 y4 + c4 y6
λ8 = −2a6 w1 + 2a1 w6 − b6 z1 + b1 z6 − c6 y1 + c1 y6
−2a7 w4 + 2a4 w7 − b7 z4 + b4 z7 − c7 y4 + c4 y7
λ9 = −2a5 w6 + 2a6 w5 − b5 z6 + b6 z5 − c5 y6 + c6 y5
−2a3 w7 + 2a7 w3 − b3 z7 + b7 z3 − c3 y7 + c7 y3
λ10 = −2a2 w7 + 2a7 w2 − b2 z7 + b7 z2 − c2 y7 + c7 y2
−2a5 w1 + 2a1 w5 − b5 z1 + b1 z5 − c5 y1 + c1 y5
λ11 = −2a4 w5 + 2a5 w4 − b4 z5 + b5 z4 − c4 y5 + c5 y4
−2a1 w3 + 2a3 w1 − b1 z3 + b3 z1 − c1 y3 + c3 y1
λ12 = −2a7 w5 + 2a5 w7 − b7 z5 + b5 z7 − c7 y5 + c5 y7
−2a2 w1 + 2a1 w2 − b2 z1 + b1 z2 − c2 y1 + c1 y2
λ13 = −2a3 w5 + 2a5 w3 − b3 z5 + b5 z3 − c3 y5 + c5 y3
−2a4 w1 + 2a1 w4 − b4 z1 + b1 z4 − c4 y1 + c1 y4
λ14 = −2a7 w1 + 2a1 w7 − b7 z1 + b1 z7 − c7 y1 + c1 y7
−2a5 w2 + 2a2 w5 − b5 z2 + b2 z5 − c5 y2 + c2 y5
70
Recordemos que el corchete, ası́ definido, es tal que la identificación que hemos hecho entre
Str0 (h2 (O)) y so(1, 9) sea, en efecto, un isomorfismo entre álgebras de Lie. Es correcto
decir que Str0 (h2 (O)) es un álgebra de Lie ya que la identidad de Jacobi en Str0 (h2 (O))
es consecuencia de la identidad de Jacobi en so(1, 9) y que el corchete está definido para
que la identificación hecha lo preserve.
Una observación importante es que el elemento d que aparece en la ecuación (II.40) resulta ser d =
1
Tr
2
(N M − M N ). Con esta observación podemos definir el corchete en
Str0 (h2 (K)) para cualquier álgebra de división normada, K, ya que el último término en
la ecuación (II.40) aparece únicamente para el caso de los octoniones. Para el caso de los
cuateriones, las identificaciones equivalentes a las hechas en (II.38) y (II.39) coinciden, ya
que C(H0 ) ∼
= Der(H) ∼
= so(3).
Como consecuencia tenemos la siguiente sucesión de álgebras de Lie,
Str0 (h2 (R)) ∼
= M20 (R) ∼
= sl(2, R)
Str0 (h2 (C)) ∼
= M20 (C) ∼
= sl(2, C)
Str0 (h2 (H)) ∼
= M20 (H) ⊕ so(3) ∼
= sl(2, H)
Str0 (h2 (O)) ∼
= M20 (O) ⊕ C(O0 ) ⊕ g2
de donde resulta que Str0 (h2 (K)) extiende la definición de sl(2, K) para cualquier álgebra
de división normada. Entonces, se puede definir a sl(2, O) como Str0 (h2 (O)). De esta
manera obtenemos que sl(2, O) ∼
= so(1, 9), como se deseaba.
71
Capı́tulo III
Aplicaciones a la Teorı́a de Calibre
En este capı́tulo construiremos las ecuaciones de Maxwell y de Yang-Mills en dimensión
diez. Estas ecuaciones son las condiciones que deben cumplir los puntos crı́ticos de las
acciones (o funcionales) de Maxwell y de Yang-Mills.
Todo lo desarrollado en este capı́tulo se puede hacer en un contexto más general. Es decir,
en lugar de considerar como espacio a R10 se puede tomar una variedad, M , de dimensión
diez. Sin embargo, al trabajar en coordenadas locales los dos caminos coinciden. Dado
que no se pierde información sobre la estructra de las ecuaciones que deseamos obtener,
preferimos considerar como espacio a R10 para simplificar la exposición.
Las ecuaciones de Yang-Mills son una generalización de las ecuaciones de Maxwell. Veremos cómo la no asociatividad de los octoniones tiene un carácter fundamental en la
escritura de las ecuaciones de Yang-Mills en términos de octoniones.
Sea Λp (R10 ) el espacio de las p-formas en R10 , con base {dx1 , . . . , dx10 }. Se define el dual
de Hodge (también llamado operador estrella), ∗, como el operador lineal
∗ : Λp (R10 ) → Λ10−p (R10 )
(0 ≤ p ≤ 10)
tal que
∗(dxi1 ∧ · · · ∧ dxip ) = dxj1 ∧ · · · ∧ dxj10−p
donde los ı́ndices j1 , . . . , j10−p son tales que dxi1 , . . . , dxip , dxj1 , . . . , dxj10−p preserva la
orientación en R10 .
72
Para dos p-formas, α, β ∈ Λp (R10 ), de soporte compacto, se puede definir un producto
interno mediante el dual de Hodge de la siguiente manera
Z
< α, β >=
α ∧ ∗β
R10
Si ω es una 1-forma entonces, las acciones de Maxwell y de Yang-Mills representan la
norma de dω,
Z
2
kdωk =< dω, dω >=
dω ∧ ∗dω
R10
Las referencias fundamentales para este capı́tulo son el libro de Mikio Nakahara, Geometry,
Topology and Physics (ver [25]), y el libro de Jürgen Jost, Riemannian Geometry and
Geometric Analysis (ver [26]). Para la definición de el dual de Hodge hemos consultado
al libro de Harley Flanders, Differential Forms (ver [27]).
III.1
La Acción de Maxwell y las Ecuaciones de Movimiento
Sean x+ , x− , x0 , . . . , x7 coordenadas en R10 y a+ , a− , a0 , . . . , a7 funciones suaves de soporte
compacto. Consideremos la 1-forma ω dada por
ω = a+ dx+ + a− dx− + a0 dx0 + · · · + a7 dx7
La acción de Maxwell, para la 1-forma ω, viene dada por
Z
S(ω) =
dω ∧ ∗dω
(III.1)
(III.2)
R10
donde el operador ∗ es el dual de Hodge. Notemos que si λ es una 0-forma, entonces
Z
S(ω + dλ) =
d(ω + dλ) ∧ ∗d(ω + dλ)
10
R
Z
=
dω ∧ ∗dω
R10
= S(ω)
73
Es decir, la acción de Maxwell es invariante bajo traslaciones de 1-formas exactas1 . Consideremos λ tal que dλ = −a− dx− y notemos que basta estudiar la acción de Maxwell
sobre una 1-forma ω como (III.1) pero con a− = 0.
Luego, obtenemos la 2-forma dω mediante la siguiente expresión
dω = −∂− a+ dx+ ∧ dx− +
7
X
∂− ai dx− ∧ dxi
i=0
+
7
X
(∂+ ai − ∂i a+ ) dx+ ∧ dxi +
i=0
donde ∂k denota
X
(∂i aj − ∂j ai ) dxi ∧ dxj
i<j
i,j∈{0,1,...,7}
∂
para k = +, −, 0, 1, . . . , 7.
∂xk
Si escribimos la 2-forma dω por
dω =
X
Fµν dxµ ∧ dxν
(III.3)
µ,ν
para µ, ν ∈ {+, −, 0, 1, . . . , 7}, entonces construimos el dual de Hodge, ∗dω, de la siguiente
forma
∗dω =
X
g αµ g βν Fµν α β γ1 γ2 ···γ8 dxγ1 ∧ dxγ2 ∧ · · · ∧ dxγ8
µ,ν
donde α β γ1 γ2 ···γ8 es totalmente antisimétrico e igual a uno para el caso + − 0 1···7 , y g ij
viene dado por
−1 , si i 6= j para i, j ∈ {+, −}
ij
g =
1 , si i = j para i, j ∈ {0, 1, . . . , 7}
0 , en cualquier otro caso
(III.4)
Para escribir los términos de ∗dω, denotemos por dxijb a la 8-forma dxk1 ∧ · · · ∧ dxk8 donde
los ı́ndices k1 , . . . , k8 ∈ {+, −, 0, 1, . . . , 7} \ {i, j} de manera ordenada según el orden
+ < − < 0 < 1 < · · · < 7. Análogamente, b
ijk1 ···k8 significa que los ı́ndices i y j no
1
Recordemos que una forma, α, es cerrada si dα = 0 y exacta si α = dβ para alguna otra forma β.
Además, el Lema de Poincaré nos dice que toda forma cerrada es exacta sobre un conjunto estrellado, en
Rn , que contenga el cero (ver [28]).
74
aparecen entre los ı́ndices k1 , . . . , k8 . Entonces,
∗ (−∂− a+ dx+ ∧ dx− ) = ∂− a+ +−01234567 dx+
d
−
∗ (∂− ai dx− ∧ dxi ) = −∂− ai b
+i01234567 dx+i
c
∗ ((∂+ ai − ∂i a+ ) dx+ ∧ dxi ) = −(∂+ ai − ∂i a+ )b
−i+01234567 dx−i
c
∗ ((∂i aj − ∂j ai ) dxi ∧ dxj ) = (∂i aj − ∂j ai )b
ij+−01234567 dxijb
para i, j ∈ {0, 1, . . . , 7} e i < j. Ası́, obtenemos que
−(∂− a+ )2 − 2
dω ∧ ∗dω =
7
X
(∂− ai (∂+ ai − ∂i a+ ))
i=0
!
X
+
(∂i aj − ∂j ai )2 dx+ ∧ dx− ∧ dx0 ∧ dx1 ∧ · · · ∧ dx7
i<j
i,j∈{0,1,...,7}
Podemos, entonces, reescribir la acción de Maxwell de la siguiente forma
Z
7
7
X
X
X
2
2
(∂j ai ) + 2
(∂− ai )(∂i a+ ) − 2
(∂− ai )(∂+ ai )
S(ω) =
−(∂− a+ ) +
R10
i=0
i6=j
i,j∈{0,1,...,7}
i=0
!
X
−2
(∂i aj )(∂j ai ) dx+ ∧ dx− ∧ dx0 ∧ dx1 ∧ · · · ∧ dx7
i<j
i,j∈{0,1,...,7}
Queremos encontrar los puntos crı́ticos de la acción de Maxwell. Para ello, igualamos a
cero la derivada de Gateaux. Ası́,
0 = lı́m
→0
Z
=
S(ω + δω) − S(ω)
−2(∂− a+ )∂− δa+ − 2
R10
7
X
((∂− ai )∂+ δai − (∂− ai )∂i δa+ + (∂+ ai − ∂i a+ )∂− δai )
i=0
+2
X
((∂i aj − ∂j ai )∂i δaj − (∂i aj − ∂j ai )∂j δai )
i,j
i,j∈{0,1,...,7}
!
dx+ ∧ dx− ∧ dx0 ∧ dx1 ∧ · · · ∧ dx7
75
donde δω = δa+ dx+ + δa0 dx0 + · · · + δa7 dx7 es una variación infinitesimal en todas las
direcciones.
Recordemos la suposición que todos los campos involucrados son de soporte compacto.
Luego, usando la regla de integración por partes, se obtiene que
!
Z
7
X
0=
(·+ ) δa+ +
(·i ) δai dx+ ∧ dx− ∧ dx0 ∧ dx1 ∧ · · · ∧ dx7
R10
(III.5)
i=0
donde los coeficientes (·+ ) y (·i ) son
(·+ ) = −∂− ∂− a+ +
7
X
∂− ∂i ai
i=0
X
(·i ) = ∂i ∂− a+ − 2∂− ∂+ ai +
(∂j ∂j ai − ∂j ∂i aj )
j6=i
j∈{0,1,...,7}
Como los incrementos δa+ , δa0 , . . . , δa7 son independientes, de la ecuación (III.5) se desprende que
−∂− ∂− a+ +
7
X
∂− ∂i ai = 0
(III.6)
(∂j ∂j ai − ∂j ∂i aj ) = 0
(III.7)
i=0
X
∂i ∂− a+ − 2∂− ∂+ ai +
j6=i
j∈{0,1,...,7}
Suponiendo que el operador ∂− es invertible (es decir, si ∂− f = 0 entonces f = 0) podemos
despejar el término ∂− a+ de la ecuación (III.6) para reemplazarlo en la ecuación (III.7) y
obtener que
2∂− ∂+ ai −
7
X
j=0
∂j ∂j ai = 0
para todo i = 0, 1, . . . , 7
(III.8)
76
Recordando la definición de g ij en (III.4), definimos el operador de D’Alembert, ,
por
= −
X
g ij ∂i ∂j
i,j
= 2∂− ∂+ −
7
X
∂k ∂k
k=0
Luego, la ecuación (III.8) se reescribe de la forma
ai = 0
para todo i = 0, 1, . . . , 7
(III.9)
Consideremos el octonión A = a0 1 + a1 e1 + a2 e2 + · · · + a7 e7 . Multiplicando cada ecuación
de (III.9) por el elemento de la base para los octoniones correspondiente y sumándolas
todas, obtenemos
A = 0
(III.10)
La colección de ecuaciones agrupadas en la ecuación (III.10) se conoce como las ecuaciones de movimiento.
Al final de la siguiente sección veremos cómo se puede reescribir la acción de Maxwell
para sus puntos crı́ticos.
III.2
Las Ecuaciones de Yang-Mills
Consideremos, ahora, un grupo de Lie compacto y semi-simple, G. Denotemos los genec
radores de G por {T a } y sean fab
las constantes de estructura del álgebra de Lie de G, es
decir,
a b X c c
T ,T =
fab T
c
77
Comencemos con una 1-forma valuada sobre el álgebra de Lie de G, es decir,
ω =
X
=
X
ωaT a
a
aa+ dx+ + aa− dx− + aa0 dx0 + · · · + aa7 dx7 T a
a
!
=
X
aa+ T a
!
dx+ +
a
X
aa− T a
!
dx− +
a
X
aa0 T a
!
dx0 + · · · +
a
X
aa7 T a
dx7
a
La acción de Yang-Mills, para la 1-forma ω, viene dada por
Z
Tr (dω ∧ ∗dω)
SY M (ω) =
R10
= Tr
X Z
!
dω a ∧ ∗dω a T a
R10
a
En lo que sigue, trabajaremos únicamente con el término dω a ∧∗dω a , pero teniendo siempre
presente que en la acción se está sumando sobre todos los ı́ndices a.
De igual manera que en la sección anterior, si λ es una 0-forma valuada sobre el álgebra
de Lie de G, entonces, para cada ı́ndice a, se tiene que
Z
a
SY M (ω + dλ) =
d(ω a + dλ) ∧ ∗d(ω a + dλ)
10
ZR
=
dω a ∧ ∗dω a
R10
= SY M (ω a )
por lo que pedimos λ =
P
a
λa T a tal que dλa = −aa− dx− y ası́ obtener que basta estudiar
la acción sobre una 1-forma como ω pero con aa− = 0 para todos los ı́ndices a.
De manera análoga a como se hizo en la ecuación (III.3), escribimos la 2-forma dω a por
dω a =
X
µν
a
Fµν
dxµ ∧ dxν
78
pero ahora
a
a b c
Fµν
= ∂µ aaν − ∂ν aaµ + fbc
aµ aν
posee un término adicional que proviene de los elementos de la base del álgebra de Lie,
de G, sobre la cual se está considerando la forma diferencial. Luego,
dω a = −(∂− aa+ )dx+ ∧ dx− +
7
X
(∂− aai )dx− ∧ dxi
i=0
+
7
X
a b c
∂+ aai − ∂i aa+ + fbc
a+ ai dx+ ∧ dxi
i=0
+
X
a b c
∂i aaj − ∂j aai + fbc
ai aj dxi ∧ dxj
i<j
i,j∈{0,1,...,7}
Construimos el dual de Hodge, ∗dω a , de la siguiente forma
∗dω a =
X
a
g αµ g βν Fµν
α β γ1 γ2 ···γ8 dxγ1 ∧ dxγ2 ∧ · · · ∧ dxγ8
µ,ν
donde, igual que en la sección anterior, α β γ1 γ2 ···γ8 es totalmente antisimétrico e igual a
uno para el caso + − 0 1···7 , y g ij viene dado por (III.4). Denotemos por dxijb a la 8-forma
dxk1 ∧· · ·∧dxk8 donde los ı́ndices k1 , . . . , k8 ∈ {+, −, 0, 1, . . . , 7}\{i, j} de manera ordenada
según el orden + < − < 0 < 1 < · · · < 7. Análogamente, b
ijk1 ···k8 significa que los ı́ndices
i y j no aparecen entre los ı́ndices k1 , . . . , k8 . Entonces, los términos de ∗dω a se escriben
de la siguiente forma
∗ −∂− aa+ dx+ ∧ dx−
= ∂− aa+ +−01234567 dx+
d
−
∗ (∂− aai dx− ∧ dxi ) = −∂− aai b
+i01234567 dx+i
c
a b c
a b c
−i+01234567 dx−i
a+ ai )b
a+ ai ) dx+ ∧ dxi = −(∂+ aai − ∂i aa+ + fbc
∗ (∂+ aai − ∂i aa+ + fbc
c
a b c
a b c
∗ (∂i aaj − ∂j aai + fbc
ai aj ) dxi ∧ dxj = (∂i aaj − ∂j aai + fbc
ai aj )b
ij+−01234567 dxijb
79
para i, j ∈ {0, 1, . . . , 7} e i < j. Ası́, como en la acción estamos sumando sobre los ı́ndices,
obtenemos que
a
dω ∧ ∗dω
a
−(∂− aa+ )2
=
−2
7
X
∂− aai (∂+ aai − ∂i aa+ ) +
i=0
X
(∂i aaj − ∂j aai )2
i<j
i,j∈{0,1,...,7}
a
+2fbc
7
X
(∂− aai )abi ac+ +
i=0
X
i<j
i,j∈{0,1,...,7}
abj aci (∂i aaj − ∂j aai )
!
a
a
+fbc
fde
X
abj aci adj aei dx+ ∧ dx− ∧ dx0 ∧ dx1 ∧ · · · ∧ dx7
i<j
i,j∈{0,1,...,7}
Para hallar los puntos crı́ticos de la acción de Yang-Mills, igualamos a cero la derivada de
Gateaux. Ası́
SY M (ω a + δω a ) − SY M (ω a )
0 = lı́m
→0
Z
7
X
=
−2(∂− aa+ )∂− δaa+ − 2
(∂− aai )∂+ δaai − (∂− aai )∂i δaa+ + (∂+ aai − ∂i aa+ )∂− δaai
R10
i=0
X
+2
(∂i aaj
−
∂j aai )∂i δaaj
− (∂i aaj − ∂j aai )∂j δaai
i,j
i,j∈{0,1,...,7}
a
+2fbc
a
a
+fbc
fde
7
X
(∂− aai )abi δac+ + (∂− aai )ac+ δabi + abi ac+ ∂− δaj
i=0
X
i<j
i,j∈{0,1,...,7}
X
a
b c
a
a
b
a
a
c
c
a
a
b
aj ai (∂i δaj − ∂j δai ) + aj (∂i aj − ∂j ai )δai + ai (∂i aj − ∂j ai )δaj
aci adj aei δabj + abj adj aei δaci + abj aci aei δadj + abj aci adj δaei
i<j
i,j∈{0,1,...,7}
!
dx+ ∧ dx− ∧ dx0 ∧ dx1 ∧ · · · ∧ dx7
donde δω = δa+ dx+ + δa0 dx0 + · · · + δa7 dx7 es una variación infinitesimal en todas las
direcciones.
80
Integramos por partes para despejar los incementos. Igual que en la sección anterior,
suponemos que todos los campos son de soporte compacto. Luego,
Z
0=
R10
2(∂− ∂− aa+ )δaa+
+2
7
X
(∂+ ∂− aai )δaai − (∂i ∂− aai )δaa+ + (∂− ∂+ aai − ∂− ∂i aa+ )δaai
i=0
X
+2
(∂j ∂i aaj − ∂j ∂j aai )δaai − (∂i ∂i aaj − ∂i ∂j aai )δaaj
i<j
i,j∈{0,1,...,7}
a
+2fbc
a
a
+fbc
fde
7
X
(∂− aai )abi δac+
+
(∂− aai )ac+ δabi
−
∂− (abi ac+ )δaai
i=0
X
i<j
i,j∈{0,1,...,7}
X
− ∂i (abj aci )δaaj + ∂j (abj aci )δaai
!
b
+ abj (∂i aaj − ∂j aai )δaci + aci (∂i aaj − ∂j aai )δaj
aci adj aei δabj + abj adj aei δaci + abj aci aei δadj + abj aci adj δaei
i<j
i,j∈{0,1,...,7}
!
dx+ ∧ dx− ∧ dx0 ∧ dx1 ∧ · · · ∧ dx7
Reescribimos algunos términos para facilitar el despeje de los incrementos, δaai ,
•
X
7 X
7
X
(∂j ∂i aaj − ∂j ∂j aai )δaai − (∂i ∂i aaj − ∂i ∂j aai )δaaj =
(∂j ∂i aaj − ∂j ∂j aai )δaai
i<j
a
• fbc
i=0 j=0
X
−∂i (abj aci )δaaj + ∂j (abj aci )δaai + abj (∂i aaj − ∂j aai )δaci + aci (∂i aal − ∂j aai )δabj
i<j
=
a
fbc
7 X
7
X
∂j (abj aci ) + abj (∂j aci − ∂i acj ) δaai
i=0 j=0
a
a
• fbc
fde
X
aci adj aei δabj + abj adj aei δaci + abj aci aei δadj + abj aci adj δaei
i<j
=
a
4fbc
a
fde
7 X
7
X
i=0 j=0
abj aci adj
δaei
7 X
7
X
=4
[[aj , ai ] , aj ]a δaai
i=0 j=0
teniendo en cuenta que las constantes de estructura son anti-simétricas y que estamos
sumando sobre los ı́ndices.
81
Ası́, tenemos que
Z
0=
R10
(·+ ) δaa+ +
7
X
!
(·i ) δaai dx+ ∧ dx− ∧ dx0 ∧ dx1 ∧ · · · ∧ dx7
(III.11)
i=0
donde los coeficientes (·+ ) y (·i ) son
(·+ ) =
∂− ∂− aa+
−
7
X
∂− ∂i aai
+
a
fbc
i=0
7
X
(∂− abi )aci
i=0
(·i ) = 2∂− ∂+ aai − ∂− ∂i aa+ +
7
X
∂i ∂j aaj − ∂j ∂j aai
j=0
a
+fbc
−(∂− abi )ac+
−
∂− (abi ac+ )
+
7
X
!
∂j (abj aci )
+
abj (∂j aci
−
∂i acj )
j=0
+2
7
X
[[aj , ai ] , aj ]a
j=0
Como los incrementos δa+ , δa0 , . . . , δa7 son independientes, de la ecuación (III.11) se desprende que
0 =
∂− ∂− aa+
−
7
X
∂− ∂i aai
+
a
fbc
i=0
0 =
2∂− ∂+ aai
−
∂− ∂i aa+
7
X
(∂− abi )aci
(III.12)
i=0
+
7
X
∂i ∂j aaj − ∂j ∂j aai
j=0
a
+fbc
−(∂− abi )ac+ − ∂− (abi ac+ ) +
7
X
!
∂j (abj aci ) + abj (∂j aci − ∂i acj )
j=0
+2
7
X
[[aj , ai ] , aj ]a
(III.13)
j=0
Consideremos el octonión Aa = aao 1 + aa1 e1 + · · · + aa7 e7 . Queremos escribir, en términos
P
de octoniones, expresiones del tipo 7i=0 ∂i aai . Para ello, definamos el gradiente octo-
82
P7
niónico, ∇O , por ∇O =
i=0 ek ∂k .
Notemos que
Re ∇O A
a
=
7
X
∂i aai
i=0
justamente como se deseaba. Podemos definir, también, el conjugado del gradiente octoP
niónico mediante ∇O = 1∂0 − 7i=1 ek ∂k .
De igual manera que en la sección anterior, suponiendo que el operador ∂− es invertible,
podemos despejar el término aa+ de la ecuación (III.12) de la siguiente forma
a
b
a −1
aa+ = ∂−−1 Re ∇O A + fbc
∂−
∂− A Ac
(III.14)
Luego, reemplazando la ecuación (III.14) en la ecuación (III.13), se obtiene que
0 =
2∂− ∂+ aai
−
7
X
a
∂j ∂j aai − ∂−−1 ∂i fbc
Re
c
c
a
∂− Ab A − 2fbc
(∂− abi ) ∂−−1 Re∇O A
j=0
e c
c
a b
∂−−1 ∂−−1 fde
Re ∂− Ad A
− fbc
ai Re ∇O A
b e
b
a b c
a
d
−fbc ai fde Re ∂− A A + fbc Re ∇O A + 2Re A ∇O aci
a
−2fbc
(∂− abi )
a
−fbc
7
X
abj ∂i acj
+2
j=0
7
X
[[aj , ai ] , aj ]a
(III.15)
j=0
Queremos reescribir los dos últimos términos de la ecuación (III.15). Empecemos por
P7
a
b
c
fbc
j=0 aj ∂i aj . Recordando que las constantes de estructura son anti-simétricas, tenemos
que
a
fbc
7
X
a
abj ∂i acj = fbc
Re Ab ∂i A
c
j=0
1 a b
c
b
fbc A ∂i A + (∂i Ac ) A
2
c
1 a
c
=
fbc Ab ∂i A − ∂i Ab A
2
=
83
Por un lado,
a
fbc
7
X
c
1 a
c
fbc Ab ∂i A − ∂i Ab A
2
abj ∂i acj =
j=0
c
1 a
c fbc −2 ∂i Ab A + ∂i Ab A
2
=
(III.16)
y por otro,
a
fbc
7
X
abj ∂i acj =
j=0
=
c
1 a
c
fbc Ab ∂i A − ∂i Ab A
2
1 a
c
c fbc 2Ab ∂i A − ∂i Ab A
2
(III.17)
Podememos, momentáneamente, combinar las ecuaciones (III.16) y (III.17) para obtener
a
fbc
Re Ab ∂i A
c
c
1 a
c
Ab ∂i A − ∂i Ab A
= fbc
2
Para el otro término, tenemos que
7
X
[[aj , ai ] , aj ]
a
=
j=0
a
fbc
7
X
[aj , ai ]b acj
j=0
=
a
−fbc
7
X
[aj , ai ]c abj
j=0
=
a c
−fbc
fde
7
X
adj aei abj
j=0
d a c
= −fbc
fde Re A Ab aei
1 a c d b
b
= − fbc
fde A A + A Ad aei
2
84
Entonces, la ecuación (III.15) queda de la siguiente manera,
0
=2∂− ∂+ aai
−
7
X
∂j ∂j aai
j=0
c
b
b
c 2Re ∇O A + A ∇O aci − 2 ∂−−1 Re ∇O A ∂− abi − ∂i ∂−−1 Re ∂− Ab A
a
+ fbc
1
c
c
−
Ab ∂i A − ∂i Ab A
2
d c b
e 1
d
a
c
b
e
−1 −1
d
b
− 2fbc fde Re A A ai + Re ∂− A A ai + ∂− ∂− Re ∂− A A ∂− ai
2
(III.18)
Multipliquemos cada ecuación en (III.18) por el elemento, ei , de la base para los octoniones
correspondiente y sumemos para obtener
0 =2∂− ∂+ Aa −
7
X
∂j ∂j Aa
j=0
a
+ fbc
b
b
c 2Re ∇O A + A ∇O Ac − 2 ∂−−1 Re ∇O A ∂− Ab − ∇O ∂−−1 Re
7
c
1X b
c
A ∂i A − ∂i Ab A ei
2
i=0
e
1
d
a
c
− 2fbc
fde
Re A Ab Ae + Re ∂− Ad A Ab + ∂−−1 ∂−−1 Re
2
−
∂− A
d
c
∂− Ab A
A
e ∂− A
b
(III.19)
Hay un único término que no está expresado en función de octoniones. Para poder lograr
esto, observemos primero que
a
Re Ab A
fbc
c
1 a b c
b
fbc A A + Ac A
2
1 a
c
c
=
fbc Ab A − Ab A
2
= 0
=
por lo que, además se tiene,
a
fbc
∂i Ab A
c
a
= fbc
∂i Im Ab A
c
85
Luego, recordando las expresiones obtenidas en (III.16) y (III.17),
7
7
X
c
1 aX b
c
c
a
fbc
A ∂i A − ∂i Ab A ei = fbc
Re Ab ∂i A ei
2
i=0
i=0
7
=
1 aX
c
c fbc
2Re Ab ∂i A ei + 2ei Re Ab ∂i A
4
i=0
=
1 aX
c
fbc
2 Ab ∂i A ei − 2ei
4
i=0
7
c ∂i Ab A
7
1 aX
+ fbc
4
i=0
7
1 a X
=
f
2 bc i=0
c
c −∂i Ab A ei + ei ∂i Ab A
b
c
c A , ∂i A , ei + Ab ∂i A ei
c
c
b
b
ei , ∂i A , A + ei ∂i A A
7
1 aX
c c + fbc
∂i − Im Ab A ei + ei Im Ab A
4
i=0
pero
a
• fbc
•
7
X
b
c
c a
A , ∂i A , ei + ei , ∂i Ab , A
= fbc
− Ab , ∂i Ac , ei + ei , ∂i Ab , Ac
h
i a
= fbc
− Ac , ∂i Ab , ei + ei , ∂i Ab , Ac
c
a
= fbc
A , ∂i Ab , ei − ei , ∂i Ab , Ac
= −2 ei , ∂i Ab , Ac
A
b
c
∂i A ei = A
b
7
X
Ab
∂0 A 1 +
c
i=0
c ∂i A ei
i=1
= Ab 1∂0 A
c
+
7
X
Ab ∂i Re A
c
+ Im A
c ei
i=1
= Ab 1∂0 A
c
= Ab 1∂0 A
c
+
+
7
X
Ab ei ∂i Re A
c 7
X
i=1
i=1
7
X
7
X
Ab (ei ∂i Re (Ac )) +
i=1
1
= Ab
2
−
∇O + ∇O
Ab ei ∂i Im A
Ab (ei ∂i Im (Ac ))
i=1
c
A −A
c
b
c + A (∇O Ac )
86
•
7
X
∂i − Im Ab A
c ei + ei Im Ab A
c i=0
=
7
X
∂i − Im Ab A
i=1
7
X
=2
c ∂i ei Im Ab A
ei + ei Im Ab A
c c i=1
7
X
c
ei ∂i Ab A
i=1
c
c
= 2∇O Ab A − ∇O + ∇O Ab A
c
= ∇ O − ∇ O Ab A
=2
Finalmente, la ecuación (III.19) queda de la forma
0 = Aa
b
b
c
c 2Re ∇O A + A ∇O Ac − 2 ∂−−1 Re ∇O A ∂− Ab − ∇O ∂−−1 Re ∂− Ab A
1 b
1
b c 1
c
c
c
c
b
c
− ∇O A −A − ∇O −∇O A A + ∇O A A
a − A ∇O A +A
+ fbc
4
2
4
X
7
b
c
+
ei , ∂i A , A
i=1
d 1
a
c
− 2fbc
fde
Re A Ab Ae + Re
2
∂− A
d
e
b
A A +
∂−−1 ∂−−1 Re
∂− A
d
A
e ∂− A
b
(III.20)
La ecuación (III.20) agrupa las ecuaciones de Yang-Mills. Notemos que si las constantes de estructura son cero (por ejemplo, si G es conmutativo) entonces la ecuación (III.20)
se convierte en la ecuación (III.10).
Queremos ver cómo luce la acción de Yang-Mills si estamos en presencia de un punto
crı́tico. Usemos la ecuación (III.12) para sustituir a aa+ en la acción de Yang-Mills. Luego,
87
Z
a
SY M (ω ) =
R10
a
− Re ∇O A +
a −1
fbc
∂−
∂− A
b
A
c
2
−2
7
X
(∂− aai )(∂+ aai )
i=0
+2
+
1
2
7
X
a
b
a −1
(∂− aai )∂−−1 ∂i Re ∇O A + fbc
∂−
∂− A Ac
i=0
7 X
7
X
∂i aaj − ∂j aai
2
i=0 j=0
a
+2fbc
a
+2fbc
7
X
c
d
c −1
∂− A Ae
∂−
(∂− aai )abi ∂−−1 Re ∇O A + fde
i=0
7 X
7
X
abj aci ∂i aaj
i=0 j=0
!
7
7
1 a a XX b c d e
aj ai aj ai dx+ ∧ dx− ∧ dx0 ∧ dx1 ∧ · · · ∧ dx7
+ fbc fde
2
i=0 j=0
Z
7
7
2
1 XX
2Re A ∂− ∂+ A + Re ∇O A
+
∂i aaj − ∂j aai
2 i=0 j=0
a b a b c
c
a
Re A ∇O A A
+2fbc Re ∂− A A ∂− Re ∇O A + Re
a
d
2 Re ∂− A Ab ∂−−1 ∂−−1 Re ∂− A Ae
b
d
a
−1
a c + ∂ −1 Re
∂− A A
∂− Re ∂− A Ae
+fbc fde
−
1
d
e
b
a
−
Re A A
Re A A
2
!
a
=
R10
a
a 2
dx+ ∧ dx− ∧ dx0 ∧ dx1 ∧ · · · ∧ dx7
Sin embargo,
7
Re ∇O A
a 2
7
2
1 XX
∂i aaj − ∂j aai
+
2 i=0 j=0
!2
7
7
7
X
1 XX
=
∂i aai
+
(∂i aaj )(∂i aaj ) − 2(∂i aaj )(∂j aai ) + (∂j aai )(∂j aai )
2 i=0 j=0
i=0
7 X
7 X
1
1
a
a
a
a
a
a
a
a
=
(∂i ai )(∂j aj ) + (∂i aj )(∂i aj ) − (∂i aj )(∂j ai ) + (∂j ai )(∂j ai )
2
2
i=0 j=0
88
=
7 X
7
X
(∂i aai )(∂j aaj ) + (∂i aaj )(∂i aaj ) − (∂i aaj )(∂j aai )
i=0 j=0
y notemos que
Z
7 X
7
X
R10 i=0 j=0
(∂i aai )(∂j aaj ) + (∂i aaj )(∂i aaj ) − (∂i aaj )(∂j aai )
Z
=
=
7 X
7
X
−aaj ∂j ∂i aai − aaj ∂i ∂i aaj + aaj ∂i ∂j aai
R10 i=0 j=0
Z
7 X
7
X
−
R10
Z
−
=
R10
i=0 j=0
7
X
aaj ∂i ∂i aaj
a
Re A ∂i ∂i Aa
i=0
Ası́, la acción de Yang-Mills, evaluada en sus puntos crı́ticos, viene dada por
!
X Z
dω a ∧ ∗dω a T a
SY M (ω) = Tr
a
R10
!
= Tr
X
SY M (ω a ) T a
a
donde
a
Z
a
2Re A ∂− ∂+ A
SY M (ω ) =
R10
a
−
7
X
a
Re A ∂i ∂i Aa
i=0
a b b c
c
Re A ∇O Aa A
Re ∂− A A ∂− Re ∇O A + Re
a
d
2 Re ∂− A Ab ∂−−1 ∂−−1 Re ∂− A Ae
b
d
−1
a
−1
a c + ∂
∂− A A
∂− Re ∂− A Ae
+fbc
fde
− Re
1
d
e
−
Re Aa A
Re Ab A
2
!
a
+2fbc
dx+ ∧ dx− ∧ dx0 ∧ dx1 ∧ · · · ∧ dx7
89
Z
=
a
Re A Aa
R10
b a
c
c
Re ∂− A Ab ∂− Re ∇O A + Re
Re A ∇O Aa A
a
d
2 Re ∂− A Ab ∂−−1 ∂−−1 Re ∂− A Ae
b
d
−1
a
−1
a c + ∂
∂− A A
∂− Re ∂− A Ae
+fbc
fde
− Re
1
d
e
Re Ab A
−
Re Aa A
2
!
a
+2fbc
dx+ ∧ dx− ∧ dx0 ∧ dx1 ∧ · · · ∧ dx7
Notemos que la acción de Maxwell es la restricción de la acción de Yang-Mills valuada
sobre un grupo conmutativo. Por lo tanto, la acción de Maxwell evaluada en sus puntos
crı́ticos queda dada por
Z
S(ω) =
Re AA dx+ ∧ dx− ∧ dx0 ∧ dx1 ∧ · · · ∧ dx7
R10
con A = a0 1 + a1 e1 + a2 e2 + · · · + a7 e7 y, para este caso, ω como en la sección anterior.
90
Conclusión
En efecto, las álgebras de división normadas son de gran utilidad e importancia para el
estudio de las teorı́as supersimétricas. En el primer capı́tulo vimos cómo el proceso de
Cayley-Dickson permite generar estas álgebras de una manera elegante y, también vimos,
cómo sirve para probar que son las únicas que hay. Luego construimos, explı́citamente,
los isomorfismos que permiten expresar las álgebras de Lorentz, correspondientes a las
teorı́as supersimétricas, en términos de las álgebras de división normadas. Vimos también
que las álgebras de Jordan aparecen, de forma natural, en el estudio de este vı́nculo.
Finalmente, logramos expresar las ecuaciones de Maxwell y las de Yang-Mills en dimensión
diez usando octoniones. Cabe destacar que el resultado obtenido es bastante elegante en
ambos casos y compacto para el caso de Maxwell. La no asociatividad de los octoniones
juega un papel fundamental al momento de manipular las ecuaciones de Yang-Mills. En
el transcurso de la escritura de estas ecuaciones vimos la necesidad de definir un operador
que hemos llamado gradiente octonionico. Este operador, que surgió de forma natural,
tiene una estructura que, creemos, puede ser explotada.
Es interesante enfocar un problema desde dos puntos de vista, el fı́sico y el matemático,
al igual que apreciar cómo las ideas desarrolladas, independientemente, en cada área se
pueden combinar. Por supuesto, no podemos olvidar que la relevancia de esta labor está en
la descripción de la naturaleza.
91
Referencias Bibliográficas
[1] John C. Baez. The octonions. Bull. Amer. Math. Soc. (N.S.), 39(2):145–205 (electronic), 2002.
[2] William E. Baylis, editor. Clifford (geometric) algebras. Birkhäuser Boston Inc., Boston, MA, 1996. With applications to physics, mathematics, and engineering, Papers
from the Canadian Association of Physicists (CAP) Summer School on Theoretical
Physics held in Banff, Alberta, July 30–August 12, 1995.
[3] Richard D. Schafer. An introduction to nonassociative algebras. Pure and Applied
Mathematics, Vol. 22. Academic Press, New York, 1966.
[4] Jörg Schray and Corinne A. Manogue. Octonionic representations of Clifford algebras
and triality. Found. Phys., 26(1):17–70, 1996.
[5] F. Reese Harvey. Spinors and calibrations, volume 9 of Perspectives in Mathematics.
Academic Press Inc., Boston, MA, 1990.
[6] John H. Conway and Derek A. Smith. On quaternions and octonions: their geometry,
arithmetic, and symmetry. A K Peters Ltd., Natick, MA, 2003.
[7] Jamil Daboul and Robert Delbourgo. Matrix representation of octonions and generalizations. J. Math. Phys., 40(8):4134–4150, 1999.
[8] Allen Hatcher. Vector Bundles and K-Theory. 2003.
[9] N. Jacobson. Composition algebras and their automorphisms. Rend. Circ. Mat.
Palermo (2), 7:55–80, 1958.
[10] Elie Cartan. Les groupes réels simples, finis et continus. Annales scientifiques de
l’É.N.S., 3(31):263–355, 1914.
[11] Robert L. Bryant. Metrics with exceptional holonomy. Ann. of Math. (2), 126(3):525–
576, 1987.
[12] Dominic D. Joyce. Compact Riemannian 7-manifolds with holonomy G2 . I, II. J.
Differential Geom., 43(2):291–328, 329–375, 1996.
[13] Murat Günaydin and Feza Gürsey. Quark structure and octonions. J. Mathematical
Phys., 14:1651–1667, 1973.
92
[14] Corinne A. Manogue and Jörg Schray. Finite Lorentz transformations, automorphisms, and division algebras. J. Math. Phys., 34(8):3746–3767, 1993.
[15] Paul Eakin and Avinash Sathaye. On automorphisms and derivations of CayleyDickson algebras. J. Algebra, 129(2):263–278, 1990.
[16] Lázaro Recht. Geometrı́a Hiperbólica y Relatividad Especial. I.V.I.C., Caracas, 1996.
[17] Pertti Lounesto. Clifford algebras and spinors, volume 239 of London Mathematical
Society Lecture Note Series. Cambridge University Press, Cambridge, 1997.
[18] A. Sudbery. Octonionic description of exceptional Lie superalgebras. J. Math. Phys.,
24(8):1986–1988, 1983.
[19] A. Sudbery. Division algebras, (pseudo)orthogonal groups and spinors. J. Phys. A,
17(5):939–955, 1984.
[20] Kenneth Hoffman and Ray Kunze. Algebra Lineal. Prentice - Hall International,
Madrid, 1974.
[21] D. H. Sattinger and O. L. Weaver. Lie groups and algebras with applications to physics, geometry, and mechanics, volume 61 of Applied Mathematical Sciences. SpringerVerlag, New York, 1986.
[22] Melvin Hausner and Jacob T. Schwartz. Lie groups; Lie algebras. Gordon and Breach
Science Publishers, New York, 1968.
[23] Richard S. Pierce. Associative Algebras, volume 88 of Graduate texts in Mathematics.
Springer-Verlag, New York, 1982.
[24] C. H. Barton and A. Sudbery. Magic squares and matrix models of Lie algebras.
Adv. Math., 180(2):596–647, 2003.
[25] Mikio Nakahara. Geometry, Topology, and Physics. Graduate student series in physics. Adam Hilger, Bristol, 1991.
[26] Jürgen Jost. Riemannian Geometry and Geometric Analysis. Springer-Verlag, Berlin,
1998.
[27] Harley Flanders. Differential Forms, volume 11 of Mathematics in Science and Engineering. Academic Press, New York, 1970.
[28] Micheal Spivak. Calculus on Manifolds. Addison-Wesley, Massachusetts, 1965.