Y x
Anuncio

II. Razonamiento con imprecisión
Tema 7
Controladores Borrosos
Sistemas Basados en el Conocimiento
Grado en Ingeniería Informática
–1–
Razonamiento con imprecisión
Tema 5. MYCIN
Tema 6. Redes Bayesianas
Tema 7. Controladores Borrosos
–2–
Referencias
• Sistemas Inteligentes. Conceptos, Técnicas y
Métodos de Construcción.
J. Cuena. Ed. UPM. 1997
• Sistemas expertos representación e inferencia
problemas resueltos.
A. Fernández. Dykinson (URJC). 2010
• Fuzzy CLIPS. User's Guide.
http://awesom.eu/~cygal/archives/2010/04/22/fuzzycli
ps_downloads/index.html
–3–
Índice
• Repaso Lógica Borrosa
• Sistemas de inferencia borrosos
• Controladores borrosos
–4–
Repaso
• Conjuntos Borrosos
función de pertenencia, µA: E → [0,1]
Altura
media
M
baja
B
alta
A
1
cm
150
160
170
180
µBaja(165) = 0.5
–5–
190
200
Repaso
• Operaciones con Conjuntos Borrosos
– µA∩B(x) = T(µA(x), µB(x))
• T(x,y) = Min(x,y) (t-norma mínimo)
• T(x,y) = W(x,y) = Max(0, x+y-1) (t-norma de Lukasiewicz)
• T(x,y) = Prod(x,y) = x·y (t-norma producto)
– µA∪B (x) = S(µA(x), µB(x))
• S(x,y) = Max(x,y) (t-conorma máximo)
• S(x,y) = W*(x,y) = Min(1, x+y) (t-conorma de Lukasiewicz)
• S(x,y) = Prod*(x,y) = x + y - x·y (t-conorma producto)
– µA’ (x) = N(µA(x))
• N(x) = 1 – x
• Dualidad
– Min / Max, Prod / Prod*, W / W*
–6–
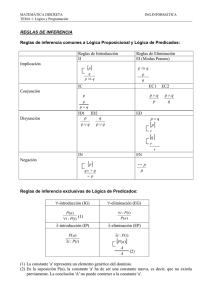
Repaso
• Lógica Borrosa
–
–
–
–
Conjunción:
Disyunción:
Negación:
Implicación:
µP∧Q(x, y) = T(µP(x), µQ(y))
µP∨Q(x, y) = S(µP(x), µQ(y))
µ¬P (x) = N(µP(x))
µP→Q(x,y) = J(µP(x),µQ(y))
• Inferencia
Modus Ponens Generalizado
Si x es P, entonces y es Q
[µP→Q(x,y)]
x es P*
[µP*(x)]
y es Q*
[µQ*(y)]
Regla Composicional de Inferencia (RCI) de Zadeh:
µQ*(y) = supx∈X T(µP*(x), µP→ Q(x,y))
–7–
Índice
• Repaso Lógica Borrosa
• Sistemas de inferencia borrosos
• Controladores borrosos
–8–
Sistema de Inferencia Borroso
SISTEMA BORROSO
BASE DE CONOCIMIENTO
- Variables Lingüísticas
- Base de Reglas
Entrada
Nítida
BORROSIFICACIÓN
(FUZZYFICACIÓN)
Valor
Borroso
MOTOR DE
INFERENCIA
–9–
Valor
Borroso
DESBORROSIFICACIÓN
(DEFUZZYFICACIÓN)
Salida
Nítida
Borrosificación/Desborrosificación
• Borrosificación
– Convertir valor nítido en un conjunto borroso
µF(x0)
µF(x0)
1
1
x0
x
x0
x
• Desborrosificación
– Obtener un valor nítido a partir de un conjunto borroso
– Métodos más habituales
xf ( x) dx
∫
cg =
∫ f ( x)dx
• Centro de Gravedad
• Media de Máximo
– 10 –
Cálculo Centro de Gravedad
xf ( x) dx
∫
cg =
∫ f ( x)dx
• cg:
• Algunas figuras geométricas conocidas
– Rectángulo: punto medio
– Triángulo rectángulo: a 1/3 del cateto
1/3
• Se puede hacer por partes
– Se divide el área de la figura en i partes:
∑ cg ⋅ A
cg =
∑A
4
i
i
i
2
3
5
6
i
i
1
– 11 –
2/3
Motor de Inferencia Borroso
• Dado un conjunto de reglas y hechos, consiste en aplicar
la RCI a las reglas
• Si hay varias reglas cuya conclusión se proyecta sobre la
misma variable (q1(y), q2(y), ..., qn(y)), se aplica una
función S de agregación (S suele ser una t-conorma),
obteniendo Q(y) = S(q1(y), q2(y), ..., qn(y))
• Una vez obtenido el conjunto borroso resultado µQ*(x), se
puede obtener
– un valor cualitativo
• algún criterio de proximidad
– Un valor numérico
• Centro de gravedad
– 12 –
Motor de Inferencia Borroso
• Valor cualitativo
– Si y toma valores en {Q1, Q2, ..., Qn}, aquella cualificación y=Qi
tal que µQi (x) ≥ µQ*(x) será aceptable
– Si no hay ningún Qi que lo cumpla, se usa algún criterio de
proximidad
– Ejemplo de Función distancia
d = α ( Ai − A) 2 + β (cg i − cg ) 2
con α+β=1,
A, Ai : áreas de las distribuciones de posibilidad
cg, cgi : centros de gravedad (del valor cualitativo i)
xf ( x)dx
∫
cg =
∫ f ( x)dx
– 13 –
Motor de Inferencia Borroso
• La base de conocimiento está formada por reglas de
la forma:
R1: Si x = A1(x) ∧ y = A2(y) ∧ ... → z = Q(z)
R2: Si x = A’1(x) ∧ y = A’2(y) ∧ ... → z = Q’(z)
R3: Si x = A’’1(x) ∧ y = A’’2(y) ∧ ... → z = Q’’(z)
.......................
• El objetivo es obtener el conjunto borroso para la
variable z
• Nota: las reglas también pueden incluir el conectivo ∨
– 14 –
Motor de Inferencia Borroso
• El motor de inferencia aplica Modus Ponens
x = A1(x) ∧ y = A2(y) → z = Q(z)
x = B1(x) ∧ y = B2(y)
z = Q*
• Los valores de entrada (B1(x) y B2(y)) pueden ser
nítidos o borrosos.
• Recordando que µQ*(y) = maxx∈X T(µP*(x), µP→ Q (x,y))
µQ* (z) = maxx,yT(B1(x) ∧ B2(y), A1(x)∧ A2(y) → Q(z))
• Según la t-norma e implicación que se utilice la
respuesta puede ser más o menos intuitiva.
– 15 –
Motor de Inferencia Borroso
• Utilizaremos implicación y t-norma de Mamdani (Min)
µQ*(z) = maxx,y T(B1(x) ∧ B2(y),A1(x) ∧ A2(y) → Q(z))
µQ*(z) = maxx,y min[min[B1(x),B2(y)],min[min(A1(x),A2(y)),Q(z)]]
µQ*(z) = min(NA,Q(z)),
siendo NA = min(NA1,NA2) (máx(NA1,NA2) si el conectivo es ∨)
NA1 = maxx [min(B1(x),A1(x))]
NA2 = maxy [min (B2(y),A2(y))]
A1
B1
NA1
A2
B2
Q(z)
NA2
• Si hay varias reglas, se combinan mediante una tconorma, en este caso S = Max
– 16 –
Procedimiento general de Inferencia
• Se tienen m reglas y datos x=B1(x) y y=B2(y) y ...
• Para cada regla
– Se calcula el NAi
– Se obtiene µQi*(z) = min(NAi,Qi(z))
• Se halla la distribución µQ*(z)=∪ µQi*(z) (t-conorma=Max)
• Se desborrosifica: transformar la distribución de
posibilidad µQ*(z) en un valor numérico.
– Centro de gravedad
– Media de los z con posibilidad máxima
– 17 –
Resumen Sistema de Inferencia Borroso
ENTRADA
x1 = v1, x2 = v2, ..., xn = vn
borrosificación
BASE DE
REGLAS
SI x1 es A11 .... Y xn es A1n ENTONCES y es B1
SI x1 es A21 .... Y xn es A2n ENTONCES y es B2
.......................
.......................
SI x1 es Am .... Y xn es Amn ENTONCES y es Bm
inferencia
RESPUESTA
y es B1*, y es B2*, .., y es Bm*
agregación
SALIDA BORROSA
y es B*
y=v
desborrosificación
– 18 –
SALIDA
Índice
• Repaso Lógica Borrosa
• Sistemas de inferencia borrosos
• Controladores borrosos
– 19 –
Descripción general
• El control de un sistema S tiene por objeto garantizar
una determinada respuesta en la salida de S próxima
a un valor de referencia a pesar del medio en que
opera S
• Control clásico: modelización matemática de los
problemas a resolver mediante sistemas de
ecuaciones diferenciales, a menudo no lineales.
• El control borroso es una de las aplicaciones más
importantes y exitosas de la Lógica Borrosa.
• Es una alternativa al control clásico para problemas
en los cuales o bien no es posible encontrar una
descripción matemática precisa o bien ésta resulta
demasiado compleja.
– 20 –
Ejemplo (control clásico): péndulo invertido
– 21 –
Esquema general de un controlador borroso
SISTEMA BORROSO
BASE DE CONOCIMIENTO
- Variables Lingüísticas
- Base de Reglas
Entrada
Nítida
BORROSIFICACIÓN
(FUZZYFICACIÓN)
Valor
Borroso
MOTOR DE
INFERENCIA
Variables de Estado
Valor
Borroso
DESBORROSIFICACIÓN
(DEFUZZYFICACIÓN)
Variables de Control
SISTEMA
CONTROLADO
– 22 –
Salida
Nítida
Motor de Inferencia Borroso
• La función de control se formula mediante una base
de conocimiento formada por reglas que relacionan
las variables de estado del proceso con la variable
de control de la forma:
R1: Si x = A1(x) ∧ y = A2(y) ∧ ... → z = Q(z)
R2: Si x = A’1(x) ∧ y = A’2(y) ∧ ... → z = Q’(z)
R3: Si x = A’’1(x) ∧ y = A’’2(y) ∧ ... → z = Q’’(z)
.......................
• El objetivo es, considerando las reglas y utilizando un
motor de inferencia, enviar en cada instante
información al sistema sobre las acciones de control
– 23 –
Controlador Borroso
• Las Aki, Qk son etiquetas cualitativas con dominio
similar a <NA,NM,NP,Z,PP,PM,PA>, siendo NA
(negativo alto), NM (negativo medio), NP (negativo
pequeño), Z (nulo), PP (positivo pequeño), PM, PA.
• Un ejemplo de posible distribución de posibilidad es
NA
-1
NM
NP
Z
0
-0.5
– 24 –
PP
PM
0.5
PA
1
Ejemplo (control borroso): péndulo invertido
• Reglas del Controlador Borroso
–
–
–
–
–
–
–
R1: Si e=NM ∧ ∆e=AZ → v=NM
R2: Si e=NP ∧ ∆e=NP → v=NP
R3: Si e=NP ∧ ∆e=PP → v=AZ
R4: Si e=AZ ∧ ∆e=AZ → v=AZ
R5: Si e=PP ∧ ∆e=NP → v=AZ
R6: Si e=PP ∧ ∆e=PP → v=PP
R7: Si e=PM ∧ ∆e=AZ → v=PM
– 25 –