El coche inteligente - Departamento de Ingeniería Telemática
Anuncio

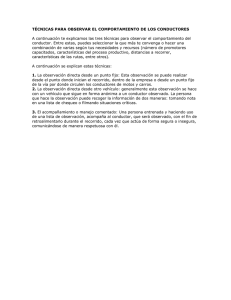
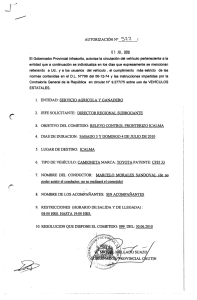
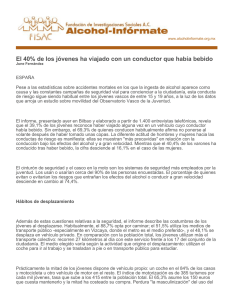
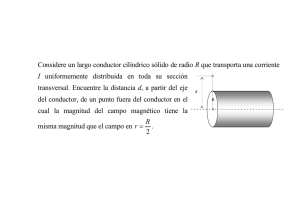
El coche inteligente En busca de mayor seguridad, sostenibilidad y confort Daniel Asegurado Turón Universidad Carlos III de Madrid Leganés, Madrid, España [email protected] RESUMEN Si alguna vez has soñado con tener un coche como KITT, el coche fantástico, ese sueño podría hacerse realidad en un futuro no muy lejano. El sueño del coche fantástico es una realidad que está emergiendo con fuerza en varios países, incluido España. El objetivo del presente documento es realizar un recorrido por la historia del automóvil hasta llegar a los considerados coches inteligentes, donde nos detendremos a analizar los diferentes proyectos que trabajan con esta idea. Palabras clave Coche autónomo, automatización de vehículos, autoconducción, Mecatrónica, radar, LIDAR, GPS, visión artificial, eye tracking, estereoscopía 1. INTRODUCCION Todos hemos tenido envidia del mítico Michael Knight cuando, con sólo una orden de voz llamaba a KITT, su coche fantástico, para que le fuese a recoger allá donde se encontrase. KITT no sólo era capaz de conducir autónomamente, sino que era capaz de reaccionar a todo tipo de peligros a los que se enfrentase gracias a una supercomputadora integrada dotada de inteligencia artificial (cerebro), que era capaz de interpretar los datos procedentes de los diversos sensores de sonidos, imágenes e incluso olores (los órganos de los sentidos). Hasta era capaz de hablar. En definitiva, un coche con el comportamiento de un ser humano. Figura 1. KITT, el coche fantástico Durante muchos años, esta idea del automóvil no ha sido más que mera ciencia ficción. Sin embargo, la realidad hoy es bien diferente. En los casi treinta años que separan la emisión de la legendaria serie de la actualidad, se han realizado grandes progresos en el estudio del coche inteligente. Organismos oficiales, como la Unión Europea, fabricantes de automóviles, como Volvo, o incluso compañías de otros sectores ajenos al motor, como es el caso de Google, se han lanzado a la carrera por conseguir el coche del futuro. ¿Cuál es el interés por obtener un coche de estas características? Siguiendo con la analogía del coche fantástico, el principal interés sigue siendo salvar vidas. Mientras que KITT se preocupaba de salvarle la vida a su compañero Michael, el objetivo de los organismos institucionales como la Unión Europea es reducir el número de muertes al volante. Según la DGT [1], en el primer semestre de 2011 ya se contabilizaban 986 víctimas mortales por accidentes en la carretera (no están incluidas las víctimas de lesiones graves o leves en el total de accidentes). En cifras relativas, en Europa murieron 62 personas por millón de habitantes el pasado 2010, según el informe del ETSC sobre seguridad vial [2]. Aunque la cifra vaya en descenso en los últimos años, sigue siendo demasiado elevado el número de personas que pierden la vida en accidentes de tráfico, por lo que es necesario la puesta en marcha de proyectos que trabajen por aumentar la seguridad y evitar el mayor número posible de siniestros. Con el coche inteligente podríamos mejorar en cuestiones de seguridad gracias a la incorporación, por ejemplo, de sistemas de alerta ante el alejamiento involuntario del carril, detectores de peatones o sistemas de control del conductor que sean capaz de reaccionar si el conductor se duerme al volante. Por otro lado, el coche inteligente tiene que velar por la mayor eficiencia energética posible. Con el creciente número de coches en el mundo (sólo en 2010 se fabricaron más de 58 millones en todo el mundo según el informe del OICA [3]), y la cada vez más escasa cantidad de recursos energéticos, debida en gran parte a la crisis del petróleo, exigen que los nuevos vehículos gestionen más eficientemente las fuentes de energía con las que cuente. Las propias instituciones gubernamentales exigen, para cumplir con las normativas de sostenibilidad y respeto del medio ambiente, que además se reemplacen los modelos más antiguos por nuevos que sean más ecológicos. En España, un 13% del parque automovilístico supera los 20 años de antigüedad según el último informe de la DGT [4], por lo que un gran número de coches deberá ser renovado en los próximos años. En este punto, el coche inteligente juega también un papel crucial, pudiendo dotársele de la capacidad para controlar el consumo de forma autónoma. Los nuevos coches eléctricos y los futuribles coches de hidrógeno u otras fuentes de energía limpias, exigirán aún más si cabe una gestión eficiente de la energía, y el desarrollo del mismo incentivará la creación de coches cada vez más sostenibles. Al automóvil, que ha vivido grandes transformaciones desde su invención, le llega por tanto el momento de cobrar inteligencia. Para ello, siguiendo el prototipo de KITT, es necesario incrementar la capacidad de percepción (mejorar los órganos de los sentidos para adquirir más información del exterior) y dotarle de un cerebro que controle, analice y sea capaz de decidir autónomamente. Nuevos medidores no sólo de mayor precisión de los niveles internos del automóvil, como tradicionalmente se ha venido desarrollando, sino para incorporar nuevas funcionalidades como detectores de obstáculos para el aparcado automático, detectores de otros objetos móviles -como otros vehículos- para aumentar la seguridad en el adelantamiento, o detectores de posición para el ambicioso plan de la autonavegación. Todo ello, una vez más, para facilitarle la vida un poco más al ser humano del siglo XXI. El presente documento analizará el concepto de coche inteligente, como el resultado de la incorporación de elementos de inteligencia artificial en el automóvil, según el siguiente esquema: - Sección 1 presenta una introducción al tema de la inteligencia artificial aplicada al automóvil y motiva el estudio realizado en este informe. - Sección 2 realiza una breve reseña histórica de la evolución del automóvil y de la incorporación de elementos de inteligencia artificial en el mismo. - Sección 3 analiza las distintas tecnologías en las que actualmente trabaja la iniciativa i2010 Intelligent Car Initiative, promovida por la Comisión Europea. - Sección 4 aborda el concepto de autoconducción, donde se presentarán diferentes proyectos que trabajan en conseguir coches que se conduzcan solos. Una especial atención se prestará al proyecto de Google, ya que está actualmente en marcha en Estados Unidos, y al proyecto que los compañeros de la Universidad Carlos III están desarrollando en esta materia. - Sección 5 valora el futuro de los coches inteligentes para la sociedad en los próximos años, desde el punto de vista del autor del documento. 2. HISTORIA Para entender con mayor detalle hacia dónde va dirigida la carrera por el coche del futuro, es interesante hacer un breve recorrido por la evolución del automóvil y repasar los avances que se han ido desarrollando en la senda de la automatización desde su invención hasta los modelos contemporáneos y los nuevos coches autónomos. 2.1 El automóvil clásico Aunque hubo vehículos a vapor que se pueden considerar los precursores del automóvil (como el invento de Cugnot en torno a 1769, o el modelo de Murdoch), se considera a Karl Benz el inventor del automóvil moderno, con la incorporación de la combustión por gasolina. El primer modelo de Benz, el Benz Patent-Motorwagen (representado en la Figura 2), al igual que los modelos que se venían desarrollando paralelamente a finales del siglo XIX, no dejaba de ser un mero carro (más bien un triciclo grande) propulsado por un motor. Figura 2. Benz Patent-Motorwagen (1885) Ya antes del invento de Benz, la idea del coche eléctrico estaba desarrollándose. Los primeros coches eléctricos se remontan a 1828, cuando el húngaro Ányos Jedlik inventa el motor eléctrico y crea el primer modelo de coche propulsado por dicho motor. Diversos ingenieros trabajan en la idea del coche eléctrico hasta que alrededor de 1839, el escocés Robert Anderson inventa el primer coche eléctrico impulsado por baterías eléctricas no recargables. Sin embargo, la abundancia de carburantes líquidos y la eficiencia de los motores de gasolina hacen que el coche eléctrico quede aparcado hasta la actualidad, cuando la necesidad de nuevas alternativas a los derivados del petróleo hace que se recupere esta vieja idea de coche eléctrico. La etapa comprendida entre los últimos años del siglo XIX y la primera mitad del siglo XX está cargada de avances en la producción de automóviles. Entre ellos, la invención de la cadena de montaje en 1910 de la mano de Henry Ford. A partir de este momento, gracias a la producción industrial de modelos de coches y su uso extendido para todas las clases sociales, la industria del automóvil adquiere una importancia vital en la economía de los países y se convierte en una de las industrias en las que más recursos se invierten en investigación y desarrollo. Los avances más destacados en la industria del automóvil durante el siglo XX se orientan principalmente en la mejora del motor. Las distintas empresas automovilísticas inician la guerra por conseguir los motores más potentes y eficientes, y se investigan en los motores de explosión, o comúnmente conocidos como diesel. En los últimos años del siglo pasado y los primeros del XXI, etapa considerada como la edad moderna del automóvil, aparecen las primeras automatizaciones dentro del coche. A continuación, se presentan algunas de estas incorporaciones: El elevalunas eléctrico: mediante un mecanismo eléctrico controlado por el usuario gracias a un botón de dos posiciones, se suben y bajan las ventanillas del automóvil, sustituyendo así a la tradicional manivela manual. El airbag: sistema de bolsas de aire que automáticamente se dispara cuando el automóvil sufre un choque brusco. Mediante un sistema electro- mecánico, el coche es capaz de saber cuándo debe activar el airbag y cuándo no. El climatizador: un sistema de calefacción que mantiene la temperatura interna del vehículo a la temperatura deseada por el conductor. Cuenta con un sensor de temperatura gracias al cual determina la temperatura del habitáculo y si debe proporcionar mayor calor o frío para mantener la temperatura dentro de los márgenes fijados por el usuario. El ordenador de abordo: con mayor o menor sofisticación, los nuevos automóviles incorporan una pantalla que facilita información sobre kilómetros recorridos, consumo medio cada 100km, velocidad media, etc. Aviso de cinturón de seguridad: mediante sensores de presencia en los asientos, y sensores en el cierre del cinturón de seguridad, el sistema de alarma detecta, cuando el coche arranca el motor, los asientos que están ocupados y si en dichos asientos sus pasajeros tienen abrochado el cinturón de seguridad. En caso contrario, se activa una alarma sonora y visual, indicando que hay pasajeros sin cinturón de seguridad. Aviso de puertas abiertas: mediante un sistema de sensor de cierre, similar al del aviso de cinturón de seguridad, cuando el motor se enciende un piloto avisa de si hay alguna puerta mal cerrada o abierta. Subida automática del volumen en función de la velocidad: al superar determinada velocidad punta, el coche sube automáticamente el volumen del reproductor de música, avisando al conductor de que está sobrepasando el límite de velocidad, o incluso despertarte el caso de que el aumento de velocidad se deba a que el conductor se ha dormido. El limpiaparabrisas automático: gracias a un sensor de lluvia en el parabrisas, la velocidad y frecuencia de barrido de los limpiaparabrisas se ajustan automáticamente de acuerdo con la cantidad de lluvia detectada. El origen de la Mecatrónica se remonta a las investigaciones en el área de la Cibernética de Turing (1936), Wiener y Morthy (1948) y Devol (1954) y los autómatas programables de Bedford Associates en 1968. En la década de los setenta, la Mecatrónica se centra en la tecnología de servomecanismos, empleada en productos como puertas automáticas. En los años ochenta, en pleno auge de la tecnología de la información, los microprocesadores empiezan a ser introducidos en los sistemas mecánicos para mejorar su desempeño. Las máquinas de control numérico y los robots se volvieron más compactos, y las aplicaciones automotrices como los mandos electrónicos del motor y los sistemas anticerrado y frenando se hicieron extensas. Por los años noventa, se agregó la tecnología de comunicaciones, creando productos que podían conectarse en amplias redes. Al mismo tiempo, se están usando novedosos microsensores y microactuadores en nuevos productos como los sistemas microelectromecánicos como los diminutos acelerómetros de silicio que activan las bolsas de aire de los automóviles. El concepto de automatización en el automóvil viene ligado precisamente a esta rama de la ingeniería y en la aplicación práctica de la Mecatrónica en técnicas que asistan al conductor en el control del vehículo. En este punto en el que se ha repasado brevemente la historia del automóvil y la aparición de distintas técnicas de automatización de la mano de la Mecatrónica, es necesario hacer una clasificación de los nuevos vehículos, en función de la inmersión de la inteligencia artificial en su producción. Así, podemos diferenciar tres tipos de vehículos: Vehículos inteligentes: aquellos que emplean técnicas de automatización de la Mecatrónica, y en particular de la inteligencia artificial, para disminuir o facilitarle las responsabilidades del manejo del automóvil al conductor. En general, las características inteligentes de estos vehículos hacen referencia a tareas de baja o media dificultad. El control del automóvil recae totalmente en el conductor y la tarea fundamental de la inteligencia del vehículo es asistirle. Existen muchas técnicas de automatización aplicadas al automóvil. Principalmente se clasifican en tres categorías: o Aunque no puedan considerarse como elementos de inteligencia artificial como tal en el automóvil, estas sutiles incorporaciones en los coches modernos son, por así decirlo, antecedentes de los proyectos que hay en marcha ya para dotar a los coches de inteligencia. El auge de las nuevas tecnologías y la aparición de la conocida Sociedad de la Información, afectan a todos los ámbitos de la vida moderna. El automóvil, herramienta que empleamos a diario, no podía ser menos y, dado el enorme capital económico que genera la industria del automóvil, cualquier mejora en este aspecto proporcionará grandes beneficios económicos, al margen de cualquier otro progreso en sostenibilidad, seguridad o confort. 2.2 La automatización en el automóvil Con el auge de las nuevas tecnologías, surgen también nuevas ramas en la ingeniería. Surge además la llamada ingeniería Mecatrónica, que engloba los campos de las ingenierías mecánica, electrónica, de control e informática, con el objetivo de diseñar productos o procesos inteligentes, involucrando sistemas de control en su diseño. o Asistencia sensorial (informativa): informan al conductor sobre eventos que ocurren y de los que el conductor puede que no se dé cuenta. Algunos ejemplos son: Detectores de obstáculos Visión nocturna peatones) Sistema de aviso para el cambio de carril Monitorización de puntos ciegos Detección anticipada de colisión Faros adaptativos Reconocimiento de señales de tráfico (con detección de Asistencia para actuación (correctiva): modifican las instrucciones del conductor para ejecutarlas de una forma más eficiente. Entre las técnicas más conocidas están: ABS (sistema de antibloqueo de frenos) o TCS (sistema de control de tracción) AWD (motor a las cuatro ruedas) ESC (control electrónico de estabilidad) DSR (respuesta a la dirección dinámica) Asistencia sistémica: introducen mejoras que no se incluyen en las anteriores. Son por ejemplo: Aparcamiento automático Asistencia para el control de distancias Dead man's switch: sistemas para detener el coche de forma segura en caso de que el conductor quede inconsciente La Comisión Europea está llevando a cabo un programa de desarrollo de coches inteligentes, en el cuál se engloban diferentes proyectos de universidades, centros de investigación y empresas del mundo automovilístico. Entre los objetivos de este proyecto están el control de crucero autónomo, sistemas de alerta para el cambio de carril o estudios para atacar el problema del conductor somnoliento. Aunque la idea se remonta a los años treinta, no es hasta los ochenta cuando se empiezan a implementar los primeros modelos reales, no sólo teóricos. En estos años, Mercedes-Benz presenta una caravana robótica capaz de alcanzar hasta 100 km/h en carreteras sin tráfico. El éxito del modelo animó a la Comisión Europea a lanzar el proyecto EUREKA-Prometheus (1987-1995) para el desarrollo de vehículos autónomos, el mayor proyecto de I+D en el campo de los vehículos autónomos hasta el momento. Al mismo tiempo en Estados Unidos el Departamento de Defensa realiza sus propios experimentos en el llamado Autonomous Land Vehicle (ALV) y lleva a cabo la primera demostración de vehículos capaces de seguir un camino utilizando LIDAR, visión artificial y control robótico autónomo para controlar un vehículo robótico hasta los 30 km/h. En 1987, consiguen que el ALV sea capaz de viajar autónomamente fuera de carretera mediante un sistema de navegación autónomo basado en sensores. El nuevo modelo es capaz de viajar 600m a 3 km/h en terrenos complejos con fuertes pendientes, barrancos, grandes rocas y vegetación. En la siguiente sección se presentarán en detalle en qué consiste este programa y que tecnologías se están investigando para el futuro coche inteligente. Vehículos semiautónomos: aquellos que emplean las técnicas de automatización para tareas de mayor dificultad, especialmente en cuestiones relacionadas con la navegación. El control del automóvil recae principalmente en el conductor pero parte de la responsabilidad se le cede al control automático. El coche semiautónomo es un paso intermedio entre el coche inteligente y el coche totalmente autónomo. Vehículos autónomos o robóticos: aquellos que confían por completo en el sistema de automatización del vehículo. Se les conoce también por el nombre de driverless, es decir, coches sin conductor. El vehículo sustituye por completo las funciones que tradicionalmente llevaba a cabo el conductor y, como el propio nombre sugiere, conduce “solo”. El vehículo autónomo es capaz de percibir el entorno (a imitación de los sentidos humanos) mediante laser, radar, LIDAR, GPS y visión artificial, y navegar por sí mismo. El papel del humano en este caso se limita a elegir un destino, pero ya no se le requiere realizar ninguna operación mecánica sobre el vehículo. 2.3 El coche autónomo Aunque en el apartado anterior se han descrito las principales características de los vehículos autónomos y posteriormente se presentarán diferentes proyectos que están trabajando en el desarrollo del coche autónomo, es interesante realizar también un breve recorrido por la historia del coche autónomo. La primera idea que se conoce sobre coches autónomos corresponde al diseño Futurama, del americano Normal Bel Geddes y financiado por General Motors, que fue presentado en la Exposición Universal de Nueva York de 1939. El proyecto presentaba coches eléctricos, alimentados por circuitos integrados en la calzada, y que eran controlados por radio. Figura 3. DARPA: Autonomous Land Vehicle (ALV) En 1994 y de vuelta a Europa, los vehículos robóticos VaMP y su gemelo Vita-2 logran circular miles de kilómetros por una autopista parisina de tres carriles, con tráfico denso, alcanzando velocidades de hasta 130 km/h con una mínima intervención humana. El vehículo empleaba visión artificial para reconocer obstáculos que se podían mover rápidamente, como otros coches, y poder realizar cambios de carril a izquierda o derecha evitando colisionar con otros vehículos. El éxito del proyecto dio paso a muchos otros proyectos en los siguientes años que demostraron ser capaces de recorrer mayores distancias a mayores velocidades. En 1996, el proyecto ARGO consigue completar una ruta de 2000 km a lo largo de autopistas del norte de Italia durante 6 días y con una velocidad media de 90 km/h. Lo sorprendente del proyecto fue que el vehículo consiguió funcionar en modo totalmente automático el 94% del tiempo. El automóvil contaba sólo con dos cámaras detectoras de blancos y negros de bajo coste y utilizaba algoritmos de visión estereoscópica para entender el entorno (se guiaba gracias a que la carretera es negra y las líneas delimitantes son blancas) en contraposición a la aproximación laser/radar de los proyectos anteriores en el mismo campo. Si hasta finales del siglo pasado, todos estos proyectos de coches autónomos no eran más que proyectos, con el cambio de milenio se han conseguido implantar sistemas de autoconducción en distintos lugares del mundo, como puede ser el caso del ParkShuttle en Rotterdam, un sistema de minibuses que funcionan sin conductor. En 2010 además, con motivo de la Exposición Universal de Shanghai, cuatro furgonetas eléctricas realizaron el primer viaje intercontinental sin conductor, saliendo desde Italia y alcanzando China. Y aún queda mucho por hacer. Vivimos en un momento en el que los coches autónomos han dejado de ser una mera idea ficticia o una serie de experimentos de laboratorio, a ser una realidad. El ejemplo más claro son los coches autónomos de Google, que ya están viajando por las calles de Nevada (EEUU) con dueño sí, pero ya sin conductor. mantener la distancia de seguridad con el vehículo de delante, ajustando automáticamente la velocidad del vehículo. Si el vehículo de delante frena, el sistema ACC hace que el vehículo reduzca la velocidad para mantener la distancia de seguridad y, cuando el otro vehículo vuelve a acelerar, automáticamente el sistema ACC acelera hasta una velocidad programada. Actualmente la mayoría de sistemas funcionan para una gama de velocidades limitada y el objetivo de la iniciativa es hacer que el sistema funcione a cualquier velocidad, incluso que sea capaz de detener el coche por completo si la situación lo requiere. 3. EL COCHE INTELIGENTE Los problemas derivados de incremento del tráfico en Europa, tales como congestión en las redes de carreteras y áreas urbanas, el daño al medio ambiente y a la salud pública, el incremento del gasto energético y el elevado número de accidentes (40.000 personas mueren al año en las carreteras europeas) han llevado a la Comisión Europea a lanzar una iniciativa en favor del coche inteligente para impulsar su implantación en los nuevos coches europeos. Entre los objetivos que persiguen alcanzar con los nuevos sistemas inteligentes están aumentar la seguridad, ayudando a los conductores a prevenir o evitar accidentes y mitigando las consecuencias de éstos, y reducir el gasto energético, facilitando a los conductores información en tiempo real sobre el estado del tráfico para evitar zonas congestionadas y optimizando el funcionamiento del motor para mejorar la eficiencia energética global. La iniciativa europea, i2010 Intelligent Car Initiative, presenta una serie de tecnologías en las que se está trabajando o ya están disponibles para los usuarios, y que se clasifican en tres categorías: sistemas de ayuda a la conducción, sistemas cooperativos para la seguridad en carretera y sistemas basados en localización para la seguridad en carretera. 3.1 Sistemas de ayuda a la conducción Los sistemas de ayuda a la conducción buscan en última instancia ayudar al conductor a evitar accidentes o a mitigar el daño causado por estos. Son los sistemas conocidos como eSafety a bordo. A continuación, vamos a analizar con más detalle algunas de las tecnologías más interesantes relacionadas con estos sistemas: 3.1.1 Sistema antibloqueo de frenos (ABS) Como su propio nombre indica, el sistema antibloqueo de frenos (ABS) evita que las ruedas se bloqueen cuando el conductor pisa el freno. Esto se consigue modulando automáticamente la presión ejercida sobre la rueda gracias a una bomba que se incorpora a los circuitos del líquido de freno y a unos detectores que controlan las revoluciones de las ruedas. Cuando los sensores detectan una reducción repentina en las revoluciones de las ruedas (debida a una frenada brusca), interpreta que las ruedas están a punto de bloquearse, por lo que envían una señal al Módulo de Control del sistema ABS, el cual reduce la presión ejercida sobre los frenos (sin intervención del conductor). El sistema ABS se empleó por primera vez en los años 70 y es uno de los sistemas inteligentes más extendidos en la actualidad. 3.1.2 Control de crucero adaptativo (ACC) Este sistema cuenta con un detector radar de gran alcance, un procesador de señales y un control longitudinal del vehículo para Figura 4. Sistema de control de crucero adaptativo (ACC) Aunque los sistemas ACC más comunes están basados en detectores radar, existen también sistemas basados en láser, aunque éstos tienen la limitación de no detectar correctamente al coche de delante en caso de condiciones meteorológicas adversas. Los sistemas ACC son infraestructuras totalmente independientes y no necesitan de ninguna señal satélite para funcionar. Sin embargo, estos sistemas pueden aprovechar también las señales GPS para realizar mejores estimaciones. Por ejemplo, si el vehículo de delante frena no por congestión del tráfico sino porque se aproxima a una salida de la autopista, en lugar de frenar como el sistema ACC convencional haría, gracias a la señal de GPS que avisa de que el otro coche tomará la próxima salida, el coche mantendría su velocidad normalmente. Existen multitud de fabricantes que incorporan el sistema ACC parcialmente (es decir, requieren la intervención del conductor a partir de cierta velocidad), aunque BMW, Mercedes-Benz, Volvo y Audi ya cuentan con modelos que incorporan sistemas ACC capaces de detener al vehículo por completo. La nueva generación de sistemas ACC incluirá también información facilitada por el coche de delante, en lo que se conoce como sistemas cooperativos. Pero para ello, hará falta un acuerdo entre los distintos fabricantes y la estandarización del sistema para la correcta comunicación entre vehículos. 3.1.3 Asistente de cambio de carril / Detector de punto muerto Estos sistemas controlan en todo momento los puntos traseros del vehículo que quedan fuera del alcance de la vista del conductor. Cuando el conductor pretende cambiar de carril y acciona la luz intermitente, el sistema se activa y, en caso de que los sensores detecten que hay otro vehículo que el conductor no ha podido ver, avisa del peligro de choque mediante una señal luminosa o mediante vibración en el volante. 3.1.4 Sistema de control y alerta antisueño El sistema de control y alerta antisueño entran dentro de lo que comúnmente se conoce por sistema de monitorización del conductor, y se encargan de analizar la atención del conductor sobre la carretera y detectar la somnolencia del mismo de diferentes formas: atendiendo a las expresión facial, los movimientos de manos y pies, analizando el parpadeo y la posición de la cabeza o incluso las alteraciones del ritmo cardiaco. Cuando el sistema, mediante alguna combinación de los factores anteriores, entiende que el conductor está durmiéndose o distrayéndose de la conducción, alerta al mismo mediante una señal acústica, una fuerte señal luminosa o, en algunos vehículos, tirando del cinturón de seguridad para con la presión captar su atención. Este sistema emplea lo que se conoce como visión artificial, una rama de la inteligencia artificial en el que el sistema autónomo debe interpretar los datos procedentes de una imagen. Las imágenes que se emplean para monitorizar la atención del conductor se toman de una cámara CCD (dispositivo de carga acoplada) de detectores LED infrarrojos, situada en el panel de mando. información de la zona alrededor del ojo y también ángulos de posicionamiento de la cabeza. Con esta información, el sistema es capaz de calcular si la mirada se está fijando en la carretera o no, aplicando geometría y una serie de márgenes donde la mirada debería estar situada, y también, de los gestos de la cara, comparando con modelos que la máquina haya aprendido o contenga de fabricación, detectar síntomas de fatiga. En la Figura 5 podemos ver los puntos que emplea un modelo de Nissan para detectar síntomas de fatiga. El sistema monitoriza la posición de determinadas zonas de la cara que, cuando superan un umbral una serie de puntos, se considera que el conductor está dormido y se activan los sistemas de alerta. 3.1.5 Sistema de protección de peatones y usuarios vulnerables de la vía pública Los primeros modelos, de la mano del fabricante Lexus, monitorizaban la posición exacta y el ángulo de la cabeza del conductor mientras el coche estaba en marcha. Si el sistema de alerta de colisión (directamente relacionado con éste) detecta un obstáculo delante del coche, y el sistema de monitorización Figura 5. Sistema de monitorización del conductor observa que la cabeza del conductor se ha mantenido fuera de la atención de la carretera demasiado tiempo, se activan los sistemas de aviso para evitar el choque. Toyota fue más allá e implantó un sistema en el Toyota Crown de 2008 que era capaz de detectar si el conductor se dormía analizando el movimiento de las pestañas. Los nuevos modelos son más ambiciosos. Gracias a las imágenes tomadas por la cámara, es posible realizar un seguimiento del movimiento de los ojos. La técnica conocida como eye tracking en inglés evalúa el punto donde se fija la mirada o también el movimiento del ojo en relación con la cabeza. Los últimos modelos de Mercedes-Benz monitorizan el nivel de fatiga y somnolencia del conductor aplicando esta técnica. Las cámaras que se utilizan para eye tracking contienen un sensor CCD con diminutas células fotoeléctricas que registran la imagen, cuyo número determina la resolución de la imagen. El sistema de detección por tanto funciona enviando una señal infrarroja que se refleja en los ojos del conductor y se captura por el sensor óptico. Generalmente, se suelen emplear la señal reflejada en la córnea y en el centro de la pupila para realizar el seguimiento de la visión del conductor. En estos sistemas, es fundamental que no sólo se analice el ojo en sí (como por ejemplo en los sistemas de reconocimiento de retina) sino en la dirección de la mirada. Por ello, además de analizar las señales reflejadas en la zona del ojo (para poder detectar también parpadeos o si el ojo está cerrado) es importante almacenar Figura 6. Sistema de detección de peatones Aunque aún no haya implementaciones en esta materia, sí hay un especial interés en el seno de la iniciativa i2010 por impulsar un sistema de protección de peatones y ciclistas. La idea de partida de este sistema es similar a la que se viene empleando para evitar colisiones con otros vehículos. Se trataría de instalar una serie de sensores de diferentes tipos que vigilen la zona delantera del vehículo y alerten de la presencia de usuarios vulnerables. El sistema integraría un control para accionar de forma automática el sistema de frenado para poder evitar la colisión. En caso de que la colisión fuese inminente y no pudiera evitarse, el sistema accionaría nuevos elementos de seguridad pasiva del coche, por ejemplo airbags en el parachoques, elevación del capó del coche, etc., que disminuyesen el riesgo de lesiones graves de las víctimas. La Figura 6 representa las mediciones realizadas por la tecnología implementada por el proyecto de coche inteligente de la Universidad Carlos III de Madrid. El sistema analiza no sólo todos los peatones que rodean al vehículo sino que también debe tener en cuenta los movimientos de éstos para poder determinar quienes pueden presentar un problema de colisión con el automóvil. 3.1.6 El sistema de aviso de cambio involuntario de carril (LDWS) Especial interés recibe esta técnica no sólo como un sistema de alerta del cambio involuntario del carril, sino por ser una técnica que también será útil en el diseño del coche autónomo. Se trata de un sistema que vigila la posición del vehículo dentro de un carril y, en caso de que el conductor se salga o esté próximo a salirse y el conductor no haya activado el intermitente, avisarle o, en los modelos más autónomos, corregir la posición del vehículo automáticamente hasta que el coche esté posicionado correctamente dentro del carril. Los sistemas que simplemente alertan al conductor se conocen como LDW (lane departure warning) mientras que los que corrigen automáticamente la posición se conocen como LKS (lane keeping system). 3.1.8 Sistema de reconocimiento de señales de tráfico La detección de señales puede ser útil para alertar al conductor de posibles señales que se le escapen a la vista, pero es muy importante para los coches autónomos. El sistema de reconocimiento de señales se basa también en la visión artificial para, dada una serie de imágenes tomadas desde la parte frontal del coche hacia la carretera, es capaz de distinguir e interpretar distintas señales de tráfico. La localización de las señales no es trivial, ya que hay que emplear modelos geométricos que tengan en cuenta el color y la forma y debe funcionar ante condiciones luminosas muy diversas. Además, el diseño de las señales no está totalmente estandarizado, y las señales antiguas y modernas son bastante diferentes. 3.1.9 Otros sistemas Existen otras tecnologías recogidas en el proyecto europeo sobre sistemas de ayuda a la conducción que sólo vamos a mencionar sin entrar en más detalle: Luces autoadaptables Sistemas electrónicos de asistencia en la frenada Control electrónico de estabilidad Indicador de cambio de marcha Sistemas de control de presión de neumáticos 3.2 Sistemas cooperativos para la seguridad en carretera Figura 7. Sistema de aviso de cambio involuntario de carril Los sensores empleados por estos sistemas se basan en sistemas de vídeo (montados detrás del parabrisas para tener una visión general en ángulo de los límites del carril), sensores láser (en la parte delantera del vehículo) y sensores infrarrojos (detrás del parabrisas o bajo el coche). Los primeros modelos, como el Citröen de 2005, empleaban infrarrojos para monitorizar las líneas pintadas en la carretera. Cuando los sensores detectaban la presencia de la línea divisoria, alertaban al conductor para que corrigiera la dirección. Audi por su parte, desarrolla en 2007 un sistema basado en una videocámara de espectro visible situada en el frontal del coche, y que captura imágenes en el ángulo de visión del conductor para estimar el carril. Además, incorpora ya un sistema en la dirección que vibra en caso de salirse del carril, corrigiendo automáticamente la dirección para que el vehículo retorne al carril. 3.1.7 Visión nocturna Para aumentar la capacidad visual del conductor durante la noche, se incorporan al vehículo un sistema de visión nocturna basado en infrarrojos, con un alcance similar al de las luces largas. El sistema no deslumbra, pues se trata de luz infrarroja, y la escena iluminada se le muestra al conductor en una pantalla especial, siendo capaz de percibir éste mejor posibles obstáculos o vehículos distantes, adelantándose a situaciones peligrosas y así poder reaccionar con mayor rapidez. Más allá de la asistencia individualizada, los nuevos modelos deben ser capaces de interactuar y comunicarse. El automóvil pasaría a ser un elemento de una red de comunicaciones y se podría gestionar la red de una forma eficiente, como ocurre con las redes de telecomunicaciones. Con la cooperación entre vehículos, la iniciativa europea pretende obtener una mayor eficacia del transporte, maximizando la eficiencia de uso de las infraestructuras disponibles, y además mejorar la seguridad. A continuación se detallan algunas tecnologías relacionadas. 3.2.1 Gestión dinámica del tráfico Los paneles de señalización variable, o paneles luminosos, que actualmente están desplegados por las carreteras de toda Europa, ayudan al conductor a conocer en tiempo real el estado de las carreteras y ofrecen información sobre rutas alternativas en caso de accidente. Los mensajes de obligatoriedad, de aviso de peligro o informativos que actualmente se envían a través de los paneles de señalización pueden ser enviados a un receptor situado en el interior del vehículo, facilitando la llegada de información útil al usuario sin necesidad de que éste tenga que llegar a la carretera que se encuentra con problemas de tráfico para conocer su estado. Muchos GPS ya disponen de esta funcionalidad de controlar el estado de las carreteras. Pero en la actualidad no deja de ser un sistema meramente informativo. En una red futura, en la que los coches cooperan entre sí para una gestión eficiente del tráfico, la decisión de ruta debería gestionarse por elementos enrutadores (similares a los routers de las redes de ordenadores) y así evitar que ciertas zonas se congestionen. 3.2.2 eCall El sistema eCall incorporaría a la red de comunicaciones de coches a los servicios de urgencia. En caso de accidente, el sistema establecería una conexión de voz con el servicio de emergencias 112, enviando la hora y lugar del accidente, las características del vehículo afectado o incluso facilitar información adicional sobre el conductor si fuese necesario ponerse en contacto con los familiares. El ahorro de tiempo en atender la emergencia supondría salvar la vida de muchos afectados en accidentes que mueren debido a que no es posible atenderles a tiempo. 3.2.3 Asistente de cruces Uno de los puntos negros en los que más accidentes se producen es en las intersecciones. La iniciativa de la Comisión también plantea actuar de forma cooperativa entre vehículos para aumentar la seguridad en los cruces. Para ello, se proponen dos sistemas. El primero, aviso de preferencia, que indique al conductor que ceda el paso a la derecha en una pantalla y, en caso de que el conductor no reaccione, avisarle del peligro de colisión. El segundo, asistente de semáforos, recibiría la información del semáforo inalámbricamente para que el coche adecúe la velocidad y poder cruzarlo en verde. 3.2.4 Sistema de aviso de obstáculo o colisión Las soluciones que actualmente hay implementadas sobre la detección de obstáculos son una extensión del sistema de control de crucero adaptativo: utilizan también información obtenida por detectores radar y generan avisos acústicos y visuales para alertar al conductor de un peligro inminente. Sin embargo, hacia lo que se está caminando es a utilizar en un futuro radares de largo y corto alcance, sistemas LIDAR y procesado de imágenes de vídeo en la detección, y contar con un sistema de frenado automático, capaz de frenar a máxima potencia, preparar los airbags o tensar los cinturones de seguridad en caso de una colisión inminente. Todas estas medidas se recogen en la iniciativa eSafety, impulsada por la Comisión Europea para mejorar la seguridad en la carretera. 4. AUTOCONDUCCIÓN Las mismas tecnologías que asisten al conductor en los coches inteligentes, se toman desde una nueva perspectiva en los modelos de coches autónomos. La técnica es la misma; la filosofía cambia. En lugar de alertar al conductor para que reaccione, ¿por qué no reaccionar autónomamente sin intervención del conductor? Con esta idea se empieza a trabajar en el coche sin conductor, aplicando estas tecnologías y delegando toda la funcionalidad del conductor sobre la inteligencia artificial del vehículo. En la actualidad existen ya varios modelos de vehículos autónomos que funcionan sin problemas sin la necesidad de un conductor. En este documento vamos a analizar dos proyectos concretos: el modelo de Google, por ser el que más atención está acaparando en el sector de los vehículos autoconducidos, y el modelo que están desarrollando investigadores de la Universidad Carlos III de Madrid, por ser parte de nuestra universidad. 4.1 El coche sin conductor de Google El proyecto que presenta Google en el ámbito del coche autónomo está liderado por el ingeniero Sebastian Thrun, director del laboratorio de inteligencia artificial de la Universidad de Standford y coinventor de sistema Google Street View. El mismo grupo de desarrollo de este prototipo ya ganó en 2005 un premio del Departamento de Defensa norteamericano gracias al vehículo robótico Stanley. Los coches sin conductor de Google son legales en el estado de Nevada desde junio de 2011, convirtiéndose en el primer estado que permite la circulación de vehículos autónomos y convirtiendo al proyecto de Google como pionero en la comercialización de estos modelos. Los sistemas LIDAR (Laser Imaging Detection and Ranging) que se mencionan se posicionan como la tecnología de detección del futuro más inmediato y es la tecnología que emplean por ejemplo las pistolas láser de la policía para determinar la velocidad de los vehículos que circular en el tráfico rodado. Estos sistemas determinan distancias entre un emisor láser y un objeto utilizando haces láser pulsados y midiendo el tiempo de retardo entre la emisión del pulso y la detección de la señal reflejada (igual que el radar pero con ondas de luz en vez de radio). Entre las principales ventajas del LIDAR sobre el radar están: es mucho más rápido; los haces de luz divergen menos que los de ondas sonoras, que se dispersan y rebotan en el entorno, y por tanto son más precisos en detección; son más económicos; puede funcionar también de noche; y es más fácil de transportar y mantener. 3.3 Sistemas basados en la localización para la seguridad en carretera En el apartado anterior ya se presentaba la tecnología eCall en materia de comunicar a los servicios de emergencias la posición exacta del lugar donde se ha producido un accidente en carretera. Además de este sistema, existen también proyectos que trabajan con mapas de a bordo como sensores de posición para (al igual que se utiliza el sensor radar para detectar obstáculos u otros vehículos) predecir donde estará el coche momentos después, pudiendo prever que le sucederá cuando llegue a dicho punto, si hay algún corte de tráfico, o algún otro imprevisto en la carretera. Figura 8. Toyota Prius modificado para operar como Google driverless car El sistema de Google combina información obtenida directamente de Google Street View con software de inteligencia artificial. Cuenta con diversos sensores: videocámaras dentro del vehículo (que permiten controlar el movimiento del vehículo y detectar peatones, ciclistas y semáforos), un sensor LIDAR en el capó del coche (que permite al vehículo detectar a más de 60 m en todas las direcciones y así crear un mapa 3D para el vehículo), sensores radar en la parte delantera un sensor de posición adherido a una de las ruedas traseras y que ayuda a localizar la posición del coche en la carretera. Los vehículos además circulan a la velocidad indicada por los mapas proporcionados por Google y lleva instalado un sistema de control de distancias con sensores para evitar colisionar con el vehículo delantero. El proyecto cuenta con siete vehículos (seis Toyota Prius como el de la Figura 6 y un Audi TT) que han demostrado ser capaces de recorrer autónomamente largas distancias (en torno a 1600km sin ninguna intervención humana y unos 230.000 con intervención ocasional). 4.2 El proyecto de la UC3M La Universidad Carlos III de Madrid cuenta con un proyecto propio en la carrera por el vehículo autónomo. El proyecto cuenta con 3 modelos de vehículos: el IVVI, el iCab y el IVVI 2.0. Sistema de control del conductor: midiendo parpadeo de los ojos, movimiento de la cabeza y apertura de la boca para detectar el grado de atención. Sistema de reconocimiento de señales de tráfico: emplean Algoritmos Genéticos y Templado Simulado como algoritmos de búsqueda para encontrar las señales presentes en las imágenes captadas por una cámara a color. Sistema de control de velocidad variable: el reconocimiento del vehículo delantero se realiza mediante análisis de imágenes en lugar de por sensores radar. El sistema se fusiona con el módulo de detección de carriles para delimitar la búsqueda. La segunda versión, el IVVI 2.0, mejora el diseño del vehículo e incorpora como novedad que los sistemas de ayuda a la conducción sólo informan al conductor cuando éste esté en una situación real de peligro. Además se incorpora una sonda CANbus (que obtiene información del funcionamiento del vehículo) así como un sistema GPS-IMU (que informa sobre posición y velocidad del vehículo) para determinar el estado del vehículo. El tercer vehículo, el iCab, es un pequeño vehículo eléctrico de golf que es controlado por un ordenador embarcado. La función de estos vehículos será llevar de forma autónoma a los visitantes del Campus, por lo que la autonomía estará limitada al entorno del Campus y a entornos previamente conocidos. Figura 9. Vehículo Inteligente basado en Información Visual (IVVI). Universidad Carlos III de Madrid El IVVI (acrónimo en inglés de Vehículo Inteligente basado en Información Visual) es el homólogo al coche desarrollado por Google. Cuenta con un sistema estéreo blanco y negro, con cámaras de barrido progresivo para poder captar imágenes en movimiento y evitar así los problemas inherentes al vídeo entrelazado, además de una cámara a color para otros temas cómo la detección de señales de tráfico. Para detectar obstáculos como peatones u otros vehículos en condiciones de visibilidad adversas, cuenta con una cámara de infrarrojo lejano capaz de distinguir objetos por el calor desprendido. En cuanto al interior, el sistema cuenta con tecnología de monitorización del estado del conductor, empleando para ello una cámara infrarroja. El cerebro del coche viaja en el maletero, en donde se hayan dos PC encargados del procesamiento de los sistemas de visión por computador. Para conocer el estado del vehículo, éste incorpora además un sistema GPS. Entre las tecnologías que se incorporan en este proyecto están: Sistema de alerta ante el alejamiento involuntario del carril: se trabaja con imágenes que simulan una vista aérea de la vía y se acompañan de algoritmos de calibración automática. Se distinguen los carriles por la discontinuidad de los niveles de gris de la imagen. Sistema de detección de peatones: dada la enorme diversidad de apariencia de los peatones y los cambios en la forma de estos entre imágenes sucesivas, se emplea un algoritmo basado en los Contornos Activos (técnica empleada para delinear el contorno de un objeto en una imagen 2D ruidosa), inicializados con los resultados de un sistema estéreo y teniendo en cuenta la simetría de las formas de los peatones. 5. EL FUTURO DEL COCHE En este documento se ha pretendido hacer un recorrido por las distintas tecnologías que se están empleando en construir los coches del futuro hoy. Sin embargo, aunque ya haya muchos modelos que incorporen tecnología inteligente y ya estén circulando vehículos sin necesidad de conductor, aún queda mucho camino por recorrer. En la línea de la iniciativa europea, considero que, una vez perfeccionadas las técnicas que hacen que un vehículo sea capaz de conducirse sólo, sin necesidad de una figura humana, hay que trazar un plan para que los vehículos cooperen entre ellos. Del mismo modo que una a persona que entiende la mecánica del coche no le es suficiente para circular por carreteras con tráfico, sino que tiene que aprender el reglamento de circulación, el coche autónomo tiene que ir a la autoescuela. Es decir, el coche que se conduce sólo debe también saber conducirse en compañía de otros coches. El período que se abre para los próximos años, en el que convivirán vehículos autónomos y vehículos tradicionales, se debe prestar especial atención en que los vehículos autónomos comprendan la inexactitud del conductor humano y, del mismo modo, lanzar un sistema de gestión de vehículos autónomos que permita la cooperación entre los distintos automóviles. Como ya adelantaba anteriormente, uno de los objetivos finales es la eficiencia, entendida no sólo como el eficiente uso de los recursos energéticos del automóvil sino también la gestión eficiente de las infraestructuras: las redes de carreteras. Y entendiéndolas como tales redes y aplicando un modelo similar al de las redes de ordenadores, en las que una serie de sistemas se encargan de gestionar el tráfico, se podría –en un futuro algo más lejanoconstruir redes de carreteras inteligentes, donde los coches autónomos sean enrutados como los paquetes en los routers. 6. REFERENCIAS [1] Dirección General de Tráfico (DGT). 2011. Accidentalidad mortal en carretera. Informe oficial. Ministerio del Interior, España. DOI=http://www.dgt.es/was6/portal/contenidos/documentos/ seguridad_vial/estadistica/accidentes_24horas/resumen_anua l_siniestralidad/resumen_siniestralidad037.pdf (última visita noviembre 2011). [2] European Transport Safety Council (ETSC). 2010. 2010 Road Safety Target Outcome:100,000 fewer deaths since 2001. 5th Road Safety PIN Report. Unión Europea. DOI=http://www.etsc.eu/documents/pin/report.pdf (última visita noviembre 2011). [7] Wikipedia. 2011. The history of the automobil. Artículo colectivo.DOI=http://en.wikipedia.org/wiki/History_of_the_ automobile (última visita noviembre 2011) [8] Wikipedia. 2011. Vehicle Automation. Artículo colectivo. DOI=http://en.wikipedia.org/wiki/Vehicle_Automation (última visita noviembre 2011) [9] Comisión Europea, Sociedad de la Información y Medios. 2010. i2010 Intelligent Car Initiative. Publicación Oficial. DOI=http://ec.europa.eu/information_society/activities/intelli gentcar/index_en.htm (última visita noviembre 2011) [10] Wikipedia. 2011. Autonomous cruise control system. Artículo colectivo. DOI=http://en.wikipedia.org/wiki/Autonomous_cruise_contr ol_system(última visita noviembre 2011) [3] Organisation Internationale des Constructeurs d’Automobiles (OICA). 2010. 2010 Production Statistics. Informe oficial. DOI=http://oica.net/category/production-statistics/ (última visita noviembre 2011). [11] Wikipedia. 2011. Driver monitoring system. Artículo colectivo. DOI=http://en.wikipedia.org/wiki/Driver_Monitoring_Syste m (última visita noviembre 2011) [4] Dirección General de Tráfico (DGT). 2009. Anuario Estadístico General 2009. Informe oficial., Ministerio del Interior. España. DOI=http://www.dgt.es/was6/portal/contenidos/documentos/ seguridad_vial/estadistica/parque_vehiculos/series_historicas _parque/series_historicas_parque.pdf (última visita noviembre 2011). [12] Lexus. 2011. Driver Monitoring System. Catálogo de prestaciones. DOI=http://www.lexus.eu/range/ls/keyfeatures/safety/safety-driver-monitoring-system.aspx (última visita noviembre 2011) [5] Wikipedia. 2011. Automobile. Artículo colectivo. DOI=http://en.wikipedia.org/wiki/Automobile (última visita noviembre 2011). [14] Universidad Carlos III de Madrid. 2010. Sistemas Inteligentes de Transportes. Sitio Web. DOI=http://www.uc3m.es/portal/page/portal/dpto_ing_siste mas_automatica/investigacion/lab_sist_inteligentes/sis_int_tr ansporte/ (última visita noviembre 2011). [6] Wikipedia. 2011. Autonomous car. Artículo colectivo. DOI=http://en.wikipedia.org/wiki/Autonomous_car (última visita noviembre 2011) [13] Wikipedia. 2011. Google driverless car. Artículo colectivo. DOI=http://en.wikipedia.org/wiki/Google_driverless_car (última visita noviembre 2011)