Programación lineal (+ extensiones). Objetivos y panorama del curso.
Anuncio
. Objetivos y panorama del curso.")
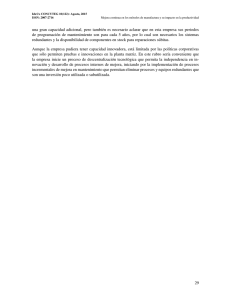
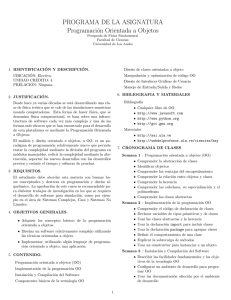
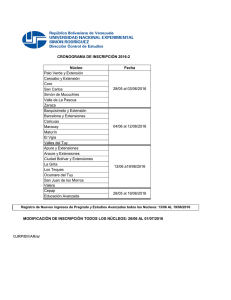
Programación lineal (+ extensiones). Objetivos y panorama del curso. Departamento de Matemáticas. ITAM. 2008. Programación lineal (+ extensiones). Objetivos y panorama del c Introducción Programación lineal http://allman.rhon.itam.mx/∼jmorales La programación lineal es una de las aportaciones de la matemática con alto impacto en las aplicaciones. El problema por resolver es el siguiente: minimizar sujeta a f (x) = c T x Ax = b, (1) x ≥ 0, Programación lineal (+ extensiones). Objetivos y panorama del c en donde Programación lineal (+ extensiones). Objetivos y panorama del c en donde x ≥ 0 indica xi ≥ 0, i = 1, 2, . . . , n Programación lineal (+ extensiones). Objetivos y panorama del c en donde x ≥ 0 indica xi ≥ 0, i = 1, 2, . . . , n c es el vector de costos Programación lineal (+ extensiones). Objetivos y panorama del c en donde x ≥ 0 indica xi ≥ 0, i = 1, 2, . . . , n c es el vector de costos A es una matriz de m × n con m < n Programación lineal (+ extensiones). Objetivos y panorama del c en donde x ≥ 0 indica xi ≥ 0, i = 1, 2, . . . , n c es el vector de costos A es una matriz de m × n con m < n b es un vector m-dimensional. Programación lineal (+ extensiones). Objetivos y panorama del c en donde x ≥ 0 indica xi ≥ 0, i = 1, 2, . . . , n c es el vector de costos A es una matriz de m × n con m < n b es un vector m-dimensional. El vector x es llamado el vector de variables de decisión Programación lineal (+ extensiones). Objetivos y panorama del c en donde x ≥ 0 indica xi ≥ 0, i = 1, 2, . . . , n c es el vector de costos A es una matriz de m × n con m < n b es un vector m-dimensional. El vector x es llamado el vector de variables de decisión la función f es conocida como la función objetivo Programación lineal (+ extensiones). Objetivos y panorama del c en donde x ≥ 0 indica xi ≥ 0, i = 1, 2, . . . , n c es el vector de costos A es una matriz de m × n con m < n b es un vector m-dimensional. El vector x es llamado el vector de variables de decisión la función f es conocida como la función objetivo El conjunto determinado por Ax = b, x ≥ 0 es llamado la zona factible. Programación lineal (+ extensiones). Objetivos y panorama del c Objetivos En este curso nos concentraremos en los siguientes aspectos de la programación lineal: Programación lineal (+ extensiones). Objetivos y panorama del c Objetivos En este curso nos concentraremos en los siguientes aspectos de la programación lineal: Estudiar diversos problemas que se pueden formular como (1) Programación lineal (+ extensiones). Objetivos y panorama del c Objetivos En este curso nos concentraremos en los siguientes aspectos de la programación lineal: Estudiar diversos problemas que se pueden formular como (1) Estudiar las condiciones teóricas que aseguran la existencia de una solución de (1) Programación lineal (+ extensiones). Objetivos y panorama del c Objetivos En este curso nos concentraremos en los siguientes aspectos de la programación lineal: Estudiar diversos problemas que se pueden formular como (1) Estudiar las condiciones teóricas que aseguran la existencia de una solución de (1) Utilizar las condiciones de optimalidad para diseñar algoritmos prácticos que resuelvan eficientemente (1) Programación lineal (+ extensiones). Objetivos y panorama del c Contenido del curso 1 Introducción. Motivación. Programación lineal (+ extensiones). Objetivos y panorama del c Contenido del curso 1 Introducción. Motivación. 2 Propiedades de un PL. Soluciones básicas. El teorema fundamental de la PL. Programación lineal (+ extensiones). Objetivos y panorama del c Contenido del curso 1 Introducción. Motivación. 2 Propiedades de un PL. Soluciones básicas. El teorema fundamental de la PL. 3 Dualidad. Teorema de dualidad. Condiciones de optimalidad de KKT. Programación lineal (+ extensiones). Objetivos y panorama del c Contenido del curso 1 Introducción. Motivación. 2 Propiedades de un PL. Soluciones básicas. El teorema fundamental de la PL. 3 Dualidad. Teorema de dualidad. Condiciones de optimalidad de KKT. 4 Método simplex I. Teorı́a. Programación lineal (+ extensiones). Objetivos y panorama del c Contenido del curso 1 Introducción. Motivación. 2 Propiedades de un PL. Soluciones básicas. El teorema fundamental de la PL. 3 Dualidad. Teorema de dualidad. Condiciones de optimalidad de KKT. 4 Método simplex I. Teorı́a. 5 Método simplex II. Aspectos numéricos. Programación lineal (+ extensiones). Objetivos y panorama del c Contenido del curso 1 Introducción. Motivación. 2 Propiedades de un PL. Soluciones básicas. El teorema fundamental de la PL. 3 Dualidad. Teorema de dualidad. Condiciones de optimalidad de KKT. 4 Método simplex I. Teorı́a. 5 Método simplex II. Aspectos numéricos. 6 Métodos de puntos interiores I. Aspectos básicos. Condiciones de KKT modificadas. La trayectoria central. Programación lineal (+ extensiones). Objetivos y panorama del c Contenido del curso 1 Introducción. Motivación. 2 Propiedades de un PL. Soluciones básicas. El teorema fundamental de la PL. 3 Dualidad. Teorema de dualidad. Condiciones de optimalidad de KKT. 4 Método simplex I. Teorı́a. 5 Método simplex II. Aspectos numéricos. 6 Métodos de puntos interiores I. Aspectos básicos. Condiciones de KKT modificadas. La trayectoria central. 7 Métodos de puntos interiores II. Aspectos numéricos. Programación lineal (+ extensiones). Objetivos y panorama del c Contenido del curso 1 Introducción. Motivación. 2 Propiedades de un PL. Soluciones básicas. El teorema fundamental de la PL. 3 Dualidad. Teorema de dualidad. Condiciones de optimalidad de KKT. 4 Método simplex I. Teorı́a. 5 Método simplex II. Aspectos numéricos. 6 Métodos de puntos interiores I. Aspectos básicos. Condiciones de KKT modificadas. La trayectoria central. 7 Métodos de puntos interiores II. Aspectos numéricos. 8 Extensiones. Complementariedad lineal. Programación cuadrática convexa. Programación lineal (+ extensiones). Objetivos y panorama del c Condiciones de optimalidad (KKT). Forma estándar c − AT λ − s = 0 Ax − b = 0 xi si = 0, i = 1, 2, . . . , n (x, s) ≥ 0 en donde λ es el vector de multiplicadores de Lagrange asociados con las igualdades Ax − b = 0 s es el vector de multiplicadores de Lagrange asociados con las desigualdades x ≥ 0. Programación lineal (+ extensiones). Objetivos y panorama del c Condiciones de optimalidad (KKT) . minimizar f (x) = c T x sujeta a Ax − b ≥ 0, (2) c − AT π = 0 (Ax − b)i πi = 0, i = 1, 2, . . . , m Ax − b ≥ 0 π ≥ 0 en donde π es el vector de multiplicadores de Lagrange asociados con las desigualdades Ax − b ≥ 0 Programación lineal (+ extensiones). Objetivos y panorama del c Ejemplo de un PL minimizar sujeta a − 2x1 − x2 x1 + (8/3)x2 ≤ 4 x1 + x 2 ≤ 2 2x1 ≤ 3 x ≥ 0, Programación lineal (+ extensiones). Objetivos y panorama del c Forma estándar de un PL minimizar sujeta a − 2x1 − x2 x1 + (8/3)x2 + x3 = 4 x1 + x 2 + x 4 = 2 2x1 + x5 = 3 x ≥ 0, Programación lineal (+ extensiones). Objetivos y panorama del c Puntos extremos de un PL 2 x =0 x =0 5 1 x =0 4 x =0 1 3 Ω 1 x2 = 0 2 Programación lineal (+ extensiones). Objetivos y panorama del c Zona factible de un PL 2 x +x =2 2x = 3 2 1 1 x =0 1 x + (8/3)x = 4 1 1 2 Ω 1 x2 = 0 2 Programación lineal (+ extensiones). Objetivos y panorama del c Zona factible e isolı́neas de un PL x2 2.5 5 2.2 6.7 5 2 4.5 f = 2x1 + x2 1.5 5 2.2 4.5 1 Ω x* 0.5 5 2.2 4.5 0 0 0.5 1 1.5 2 2.5 x1 Programación lineal (+ extensiones). Objetivos y panorama del c