MAQUINAS ELECTRICAS - electrotecnia aplicada a la ing
Anuncio

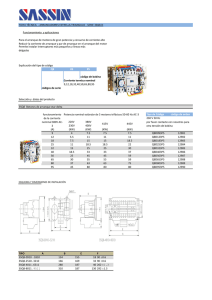
ELECTROTECNIA APLICADA A LA INGENIERIA MECÁNICA UD. 4 MAQUINAS ELECTRICAS Descripción: Principios de electromagnetismo y funcionamiento y aplicaciones de las diferentes máquinas eléctricas. 1 Tema 4.2. MÁQUINA ASÍNCRONA: MOTOR DE INDUCCIÓN 2 Tema 4.2. Máquina asíncrona PRINCIPIOS DE FUNCIONAMIENTO: • La máquina asíncrona es una máquina eléctrica rotativa basada en los mismos principios de inducción electromagnética que el transformador, además de la ley de Laplace. • Partes: • Estator: Contiene el devanado inductor en el que se introduce la corriente alterna. Se corresponde con el primario. • Rotor: Está compuesto por 3 fases o por barras cortocircuitadas formando un devanado multifase. Se corresponde con el secundario. • Carcasa: Es la envolvente del motor, contiene estator, rotor, caja de bornes, eje y otras partes mecánicas. • Eje: Es el elemento mecánico por el que extraemos la energía del motor. 3 Tema 4.2. Máquina asíncrona • Principio de funcionamiento: Intensidad Campo magnético Fuerza Tema 4.2. Máquina asíncrona ESTATOR: está constituido por un apilamiento de chapas de acero con ranuras en el interior donde se aloja un devanado trifásico. Devanado: El devanado es la disposición de las fases que se haga en las ranuras del estator. Llamaremos polo a cada espira que tenga una fase y las espiras siempre serán pares. El objetivo es conseguir un flujo magnético giratorio distribuido senoidalmente por el entrehierro. 5 Tema 4.2. Máquina asíncrona Devanado de dos polo: Cada fase forma dos espiras opuestas 180º en el estator. Devanado de 4 polos: Cada fase forma 4 espiras distribuidas por el estator: 6 Tema 4.2. Máquina asíncrona ROTOR: Existen dos tipos de rotor: •Devanado: Consta de un devanado trifásico similar al del estator conectado en estrella y con salida a unos anillos en el eje. •Jaula de ardilla: Consta de dos anillos laterales unidos por barras conductoras. 7 Tema 4.2. Máquina asíncrona El número de fases del rotor puede variar, pero el número de polos debe ser igual al del estator. En el caso del devanado es una característica constructiva pero en el caso de jaula de ardilla las barras dan lugar a un m2 fases. La necesidad de igualar el número de polos hace que: m2=nºbarras/nºpolos •Devanado: •La posibilidad de incluir resistencias entre los anillos permite el ajuste del par del motor. •Tiene mayores pérdidas mecánicas. •Su construcción es más compleja. •Jaula de ardilla: •Las barras están cortocircuitadas por lo que no hay ajuste de la resistencia. •Su construcción es sencilla. •Es el más utilizado. 8 Tema 4.2. Máquina asíncrona • Circuito equivalente: – El circuito equivalente del motor de inducción es muy similar al del transformador aunque hay que tener ciertos aspectos en cuenta: • La velocidad relativa entre estator y rotor hace que la frecuencia en ambos circuitos no sea la misma. • Además del número de espiras, pueden ser diferentes el número de fases y el factor de devanado. Tema 4.2. Máquina asíncrona • Ensayos: – Ensayo de vacío: Con el eje del motor libre, se aplica la tensión nominal al estator. Se mide P0 e I0 • A diferencia del transformador, en el motor de inducción también existen pérdidas mecánicas además de las del cobre y las del hierro: – 𝑃0 = 𝑃𝐹𝐹 + 𝑃𝑚 +𝑃𝐶𝐶𝐶 - Las pérdidas del cobre se determinan midiendo la resistencia del estator. - Para determinar las perdidas del hierro, deberán tomarse medidas adicionales: - Realizar el ensayo a diferentes tensiones (30%-100% de V1n) y determinar PFe+Pm: - 𝑃𝐹𝐹 + 𝑃𝑚 = 𝑃0 − 𝑚1 ∗ 𝑅1 ∗ 𝐼𝐼2 - El resultado de estos ensayos al dibujar PFe+Pm respecto de V1 es una parábola cuyo punto de corte con el eje vertical corresponde con las pérdidas mecánicas (constantes durante los ensayos ya que la velocidad es constante). • Una vez que se ha calculado Pfe se calcula Rfe y Xμ tal y como se hacía en el transformador Tema 4.2. Máquina asíncrona • Ensayos: – Cortocircuito: Se bloquea el eje del motor, siendo por tanto la velocidad 0 y la resistencia de carga del circuito equivalente también 0. En este caso, el motor se comporta exactamente como un transformador y el ensayo se realiza de manera identica logrando obtener los valores de la rama en serie del circuito equivalente. Tema 4.2. Máquina asíncrona • Diagrama de potencias PCu1 PCu2 Pmi PFe P1 PCu1 P1 PFe ESTATOR PCu2 Pa ROTOR Pm Pmi EJE Pu Tema 4.2. Máquina asíncrona • Par motor: • 𝑀= • 𝐼= 𝑃𝑚𝑚 𝜔 = 𝑃𝑚𝑚 2𝜋 𝑛⁄60 𝑉1 𝑅 2 𝑅1 + 𝑠2 +𝑋𝑐𝑐 2 = 𝑃𝑚𝑚 𝑚1∙ 𝑅2∙ 𝐼 2 = 2𝜋 𝑛1⁄60(1−𝑠) 2∙𝜋∙ 𝑛𝑛⁄60∙𝑠 𝑀= 𝑛 2∙𝜋∙ 601 𝑅′ 𝑚1∙ ∙ 𝑠 2 ∙𝑉 2 1 𝑅2 2 𝑅1 + 𝑠 +𝑋𝑐𝑐 2 Tema 4.2. Máquina asíncrona • Par motor: • • 𝑑𝑑 𝑑𝑑 = 0 → 𝑠𝑚 = 𝑅′ 2 𝑅 2 1 +𝑋 2 𝑐𝑐 𝑀𝑀𝑀𝑀 = 𝑚1∙ ∙𝑉 2 1 𝑛 4∙𝜋∙ 601 𝑅1 2 +𝑋𝑐𝑐 2 Es posible modificar el punto de maximo par del motor añadiendo una resistencia al rotor (rotores de devanado). Este cambio, no afecta al par máximo. Tema 4.2. Máquina asíncrona • Régimen motor: • • 0<s<1 Pto 0: s=0=>M=0 – N=n1=> IMPOSIBLE • Pto A: s=sn=>M=Mn (nominal) – S= (3-8%) • • Pto C: Par máximo s=(15-30%) Pto D: Arranque s=1; M=Ma. • La curva a la izquierda de C es INESTABLE, ya que al aumentar la velocidad aumenta el par. La parte izquierda es ESTABLE. Cuanto más vertical sea la parte estable, más estable será la velocidad de rotación. • Tema 4.2. Máquina asíncrona • Arranque en estrella triángulo: – El hecho de que la impedancia del motor sea muy baja a bajas velocidades provoca elevadas intensidades de arranque. Una manera de reducirlas es el arranque en estrella-triángulo: – Al conectarse en estrella, el par y la intensidad son un tercio de los que se obtienen en triángulo. Motores de inducción trifásicos Datos a definir Observaciones Requisitos eléctricos Tipo de corriente Corriente trifásica, corriente monofásica Frecuencia Tensión de funcionamiento, para los motores multitensión indicar todos valores y tolerancias posibles V Hz Datos de catálogo Designación de tipo Valor nominal Velocidad Intensidad nominal A Intensidad nominal/ arranque mínima Par Nm Par nominal/mínimo Par nominal/desincronización Par nominal/arranque máximo Momento de inercia kgm2 Rendimiento η % Tiempo de bloqueo máx. s Tiempo de arranque máx. s Tolerancias Tipo de diseño Conmutación Triángulo, estrella Tipo de rotor Rotor de jaula, rotor bobinado Modelo IM.. Tipo de protección IP.. Tipo de enfriamiento Enfriamiento interno natural Enfriamiento automático exterior Enfriamiento de circuito cerrado independiente Tipo de aislamiento B, F, H Amplitud de vibración Nivel de ruido Normas especiales Caja de bornas Extremos axiales Componentes exteriores e interiores Frenos, tacogenerador Calentador de espacios, ventilación independiente Herramientas medidoras de temperatura - Protección del termistor - Interruptor bimetálico - Resistores PTC Tabla 4.5.1 4.5 Especificaciones del fabricante Para motores con varias velocidades, valor por velocidad Para motores con varios polos, velocidad por potencia de salida Especificaciones del fabricante Especificaciones del fabricante Para aplicaciones especiales Especificaciones del fabricante Especificaciones del fabricante Especificaciones del fabricante Especificaciones del fabricante Especificaciones del fabricante Especificaciones del fabricante Especificaciones del fabricante Establecidas por normas Para arranque estrella-triángulo, especificar siempre triángulo IEC 34-7, Pieza 7 IEC 34-7, Pieza 7 Indicar límite temp., si es necesario Normal o reducida db Normas eléctricas y mecánicas Indicar tipo de protección y diseño, si es necesario Indicar tipo de protección y diseño, si es necesario Indicar interruptor o enchufe, si es necesario Para rodamientos o bobinados del estator Contactos de conexión o corte Datos de catálogo para motores Motores de inducción trifásicos Datos para definirse Observaciones Par antagonista - constante - aumento cuadrático - curva especial Nm Momento de inercia de la carga kgm2 Hablar con fabricante, si es necesario Tipo de arranque - estrella-triángulo Convertir para máx. velocidad del motor Arranque de estrella-triángulo intensificado, si es necesario - arranque a plena carga - arranque sin carga - otros métodos Arrancador suave o controlador de carga, si es necesario Frenado eléctrico Frenado de contramarcha o dinámico Modo de funcionamiento S1 S2 S3 min % S4 %, c/h S5 %, c/h S6 % S7 c/h S8 %, c/h S9 Temperatura ambiente Altura Convertir para eje de motor, si es necesario Funcionamiento continuo Servicio temporal Tipo de servicio periódico intermitente sin arranque Servicio periódico intermitente con arranque Servicio periódico intermitente con arranque y frenado eléctrico Tipo de servicio de funcionamiento contínuo Servicio de funcionamiento continuo con arranque y frenado eléctrico Servicio periódico de funcionamien to continuo con cambios de carga/velocidad relacionados Servicio con variaciones de carga y velocidad no periódicas oC metros sobre el nivel del mar Sentido de rotación Ajuste de velocidad a la dcha., a la izda. o ambos método y desde...a... Influencias climáticas Considerar también humedad relativa Carga de rodamiento y axial Fuerza axial N Fuerza radial N Fuerzas rotativas N Tabla 4.6.1 4.6 Dirección de fuerza respecto a posición de eje Indicar distancia respecto al saliente del eje Datos importantes para el diseño del motor