Apuntes
Anuncio

Capı́tulo 4
El Modelo de Espacio-Estado
4.1.
Introducción
Tal y como hemos visto en la lección anterior el punto de vista clásico en la
Teorı́a de Control consiste en estudiar las propiedades de los sistemas a partir de
su comportamiento entrada salida. La teorı́a moderna de control pone el énfasis en
el concepto de estado del sistema. En una primera aproximación el estado de un
sistema en un instante dado es el valor de unas variables internas del sistema (en
ocasiones ficticias y no accesibles) que describen, a lo largo del tiempo, la evolución
del mismo.
Antes de proceder a una definición formal del concepto de estado, de un sistema
un ejemplo puede servir de ilustración.
Ejemplo 4.1 Supongamos que la función de transferencia de un sistema es
1`s
ŷpsq
“ ĝpsq “
ûpsq
1 ` 2s ` 5s2
de modo que
p1 ` 2s ` 5s2 qŷpsq “ p1 ` sqûpsq.
57
(4.1)
58
El modelo de espacio-estado
Usando la transformada de Laplace inversa podemos escribir las ecuaciones del sistema en el dominio del tiempo suponiendo el sistema en reposo en t “ 0:
9 ` yptq “ uptq
9 ` uptq
5:
y ptq ` 2yptq
(4.2)
1
9 ´ uptq, la ecuación (4.2) es equivalente al
Definiendo: x1 ptq “ yptq, x2 ptq “ yptq
5
siguiente conjunto de sistemas; uno de ecuaciones diferenciales y otro de ecuaciones
algebraicas:
$
’
& x9 1 ptq “ x2 ptq ` 1 uptq
5
,
1
2
3
’
% x9 2 ptq “ ´ x1 ptq ´ x2 ptq ` uptq
5
„5
25
“
‰ x1 ptq
yptq “ x1 ptq “ 1 0
.
x2 ptq
(4.3)
(4.4)
En efecto,
1
9 “ x2 ptq ` uptq,
x9 1 ptq “ yptq
5
y
2
1
1
1
9
9 ´ yptq ` uptq “
“ ´ yptq
x9 2 ptq “ y:ptq ´ uptq
5
5
5
5
1
2
2
1
“
x1 ptq ´ x2 ptq ´ uptq ` uptq “
5
5
25
5
1
2
3
“ ´ x1 ptq ´ x2 ptq ` uptq
5
5
25
Este sistema algebraico-diferencial tiene una única solución una vez fijadas unas
condiciones iniciales para x1 ptq y x2 ptq. Al vector (función vectorial)
„
x1 ptq
xptq “
x2 ptq
se le llama vector de estados del sistema, mientras que las funciones vectoriales
(en este caso escalares) yptq y uptq son, como siempre, las salidas y entradas del
sistema. Si tomamos transformadas de Laplace de los sistemas (4.3) y (4.4) con la
condición inicial x1 p0q “ x2 p0q “ 0, la relación entre las transformadas de Laplace
de yptq y uptq es la función de transferencia ĝpsq de (4.1). Por lo tanto, el sistema
formado por las ecuaciones (4.3) y (4.4) es un modelo cuyas soluciones tienen el
mismo comportamiento entrada salida que el sistema original. Este modelo es, en
general, no único y se llama modelo de espacio-estado del sistema (4.1).
4.2 El modelo de Espacio-Estado. Formalismo
4.2.
59
El modelo de Espacio-Estado. Formalismo
Según Rosenbrock “es más fácil distinguir un sistema dinámico que definirlo”
([13]). Se han propuesto varias definiciones formales de “sistema”, todas ellas buscando un modelo para el mismo concepto. Algunas referencias son: [4], [6], [10] or
[14]; sin olvidar, por supuesto que formalismos similares se han usado desde hace mucho tiempo en la teorı́a de sistemas dinámicos (sin controles ni salidas). Seguiremos
aquı́ algunas ideas de [9] y [15].
En vez de presentar una definición formal vamos a introducir la terminologı́a y
las relaciones que se necesitan entre distintos elementos constitutivos de los sistemas
de control cuando se utiliza el modelo de espacio-estado. Algunas de ellas ya fueron
presentadas en el Capı́tulo 1. Ahora las introducimos con más detalle. En este tipo
de sistemas están presentes los siguientes elementos:
Un conjunto tiempo. Un sistema dinámico evoluciona con el tiempo y, por lo
tanto, las variables que describen el comportamiento del sistema son funciones del
tiempo. Con cada sistema dinámico hay un conjunto tiempo asociado a él T Ă R
que contiene todos los valores de t en los que pueden ser evaluadas las variables.
Este conjunto T puede ser continuo como en los ejemplos 2.4, 2.8 o el de la Sección
2.5.3 en los que T “ r0, 8q, o discreto; i.e. T consiste de puntos aislados de R;
e.g. T “ Z o T “ N como en el ejemplo de la Sección 2.5.2. Por conveniencia
notacional escribiremos rt0 , t1 q en vez de T X rt0 , t1 q para referirnos al intervalo (en
T ) tt P T |t0 ď t ă t1 u siempre que el conjunto tiempo T subyacente sea claro.
Unas variables externas. Son las que describen las interacciones del sistema
con el mundo exterior. Es el diseñador del modelo quien debe determinar cuáles son
las variables significativas que intervienen en el problema. Es habitual (aunque no
siempre evidente) dividir las variables en una familia u “ pui q de entradas y otra
de salidas y “ pyi q. Las entradas son las variables que representan la influencia del
mundo exterior en el sistema fı́sico. Pueden ser de diferentes tipos; por ejemplo,
entradas que se pueden utilizar para tener algún control sobre el sistema (controles)
o sobre las que no se puede influir como perturbaciones. En el Ejemplo 2.8 carropéndulo la entrada con la que se pretende controlar el péndulo invertido es la fuerza
horizontal ejercida sobre el carro (βuptq en la notación usada allı́).
Las salidas son las variables con las que el sistema actúa sobre el mundo exterior.
También las hay de distintos tipos; algunas de ellas sirven para medir lo que sucede en
el sistema, sobre otras se quiere tener control. Ası́ las salidas medibles en el Ejemplo
2.4 de la suspensión del coche son el desplazamiento del chasis y sus velocidad, y
las salidas en el Ejemplo 2.8 del carro-péndulo son el desplazamiento del carro rptq
desde una posición de referencia dada y el ángulo del péndulo θptq teniendo como
objetivo que este ángulo sea 0. Para el sistema en tiempo discreto del Ejemplo 2.5.2
60
El modelo de espacio-estado
está claro que la entrada es la desviación del gasto público Gptq mientras que hay dos
tipos de salidas: unas que se pueden medir (el consumo C ˚ ptq, las inversiones I ˚ ptq
y el PIB P ˚ ptq) cuya desviaciaciones de unos valores objetivo se quieren controlar.
En un sistema dinámico debe estar claro el conjunto U donde las entradas toman sus valores y el conjunto Y donde lo hacen las salidas. Ası́ en el Ejemplo 2.8
podrı́amos tomar U “ R, Y “ R2 pero también, quizá, ciertos subconjuntos de R y
R2 , respectivamente. Supondremos que los valores admisibles de las entradas están
en un conjunto determinado de una vez por todas y que, por consiguiente, no cambia
con el tiempo.
El sı́mbolo U lo usaremos para el conjunto de las funciones de entrada o de
control: up¨q : T Ñ U . Por lo general serán funciones continuas, o continuas a
trozos; suficentemente generales como para que podamos usar la teorı́a matemática
básica de existencia de soluciones sin tener que prestar demasiada atención a los
detalles.
De forma similar Y se usará para denotar el conjunto de las funciones de salida
admisibles: yp¨q : T Ñ Y .
El estado interno. Las variables de estado describen los procesos que tienen
lugar en el interior del sistema y sirven para modelizarlos. Al igual que las entradas
y salidas, evolucionan con el tiempo y para cada valor de t P T , xptq representará el
valor de la variable de estado en el instante t. Sencillamente diremos que xptq es
el estado del sistema en el instante t. El conjunto de estados; es decir, el conjunto
donde toman valores los estados, lo denotamos con X de modo que la variable de
estados es una función xp¨q : T Ñ X. Requeriremos que xp¨q cumpla las siguientes
propiedades básicas:
(I) El estado actual del sistema y la función de control elegida determinan los
futuros estados del sistema. Con más precisión: dado el estado xpt0 q “ x0 del
sistema en el instante t0 P T y una función de control up¨q P U, la evolución
del estado del sistema xptq P X queda completamente determinada para todo
t en algún intervalo de tiempo de T que comienza en t0 . Este intervalo de
tiempo puede verse como el “intervalo de existencia” de la función (también
llamada trayectoria) xp¨q que comienza en x0 en el instante t0 bajo la acción
de la función de control up¨q. Lo representaremos como Tt0 ,x0 ,up¨q .
(II) Dado xpt0 q “ x0 en el instante t0 P T , el estado xptq en cualquier instante
posterior t P T (t ě t0 ) sólo depende de los valores upsq para s P rt0 , tq. Ası́,
en el instante t, el estado xptq no está influenciado por los valores presente
y futuros de la función de control upsq, s ě t, ni por los controles pasados
anteriores a t0 ; es decir, por upsq para s ă t0 . .
4.2 El modelo de Espacio-Estado. Formalismo
61
(III) Los valores de las salidas en el instante t están determinados completamente
por los valores de las entradas, uptq, y estados, xptq, en t. En otras palabras,
las entradas antiguas sólo actúan sobre las salidas presentes a través de los
efectos acumulados en el estado presente.
Estos requerimientos aseguran el principio de causalidad de los sistemas de control. Si miramos las salidas yptq como el “efecto” de las “causas” (=entradas) pasadas, entonces uptq representa la causa en el instante t y el estado xptq acumula la
totalidad de las “causas” pasadas.
Las condiciones (I), (II) y (III) permiten introducir dos funciones fundamentales:
La función de transición de estados. De acuerdo con (I) y (II) el estado del
sistema a lo largo del tiempo (también llamado trayectoria) puede describirse por
una aplicación ψ llamada función de transición de estados definida como sigue:
xptq “ ψpt; t0 , x0 , up¨qq,
t P Tt0 ,x0 ,up¨q .
Realmente, por (II), ψpt; t0 , x0 , up¨qq sólo depende de la restricción de up¨q a rt0 , tq. En
la mayorı́a de los casos, esta aplicación viene definida implı́citamente por las ecuaciones que definen el sistema. Si éstas son ecuaciones diferenciales o en diferencias
como en todos los ejemplos del Capı́tulo 2, entonces se debe resolver un problema de
condiciones iniciales con xpt0 q “ x0 y un control up¨q dado para conseguir la función
ψpt; t0 , x0 , up¨qq, t P Tt0 ,x0 ,up¨q , que es la solución del sistema xptq.
La función de salida. Debido a (III) la salida del sistema está determinada en
cada instante de tiempo t por el control y el estado en este instante:
yptq “ ηpt, xptq, uptqq.
Esta función η recibe el nombre de función de salida.
En el Ejemplo 4.1, la función de transición de estados es la única solución del
sistema (4.2) que cumple la condición inicial que se establezca. En concreto, si
xpt0 q “ x0 , up¨q es una función continua en el intervalo rt0 , t1 s,
„
„
0
1
1{5
A“
y b“
´1{5 ´2{5
3{25
entonces la función de transición de estados serı́a
żt
0
Apt´t0 q 0
ψpt; t0 , x , up¨qq “ e
x `
eApt´sq bupsqds,
t0
Y la de salidas:
“
‰
yptq “ ηppt, xptq, uptqq “ 1 0 xptq,
t P rt0 , t1 s.
62
El modelo de espacio-estado
que, en este caso, no tiene una depencia explı́cita de t y de u.
En este ejemplo, Tt0 ,x0 ,up¨q “ rt0 , t1 s, y no se ve la dependencia del periodo de
existencia de la trayectoria respecto de las condiciones iniciales y la función de
control. Este otro ejemplo lo ilustra mejor.
Ejemplo 4.2 Consideremos el problema de condiciones iniciales
9
xptq
“ xptq2 ` uptq,
xp0q “ x0
(4.5)
donde T “ R y x0 P X “ R. Supongamos que el control es constante pero arbitrario
uptq “ a para todo t P R. Separando las variables e integrando obtenemos:
arctan
0
Poniendo cpx , aq “ arctan
ˆ
ˆ
x0
?
a
xptq “
x
?
a
˙
˙
´ arctan
ˆ
x0
?
a
˙
“ at.
tenemos que la solución de (4.5) es
?
a tanpat ` cpx0 , aqq,
t ě 0.
¯
1´ π
˘ ´ cpx0 , aq .
Ahora bien, como tanp˘π{2q “ ˘8, resulta que x “explota”para t “
a
2
En consecuencia
ˆ
˙
´π{2 ´ cpx0 , aq π{2 ´ cpx0 , aq
Tt0 ,x0 ,up¨q “ ´
,
,
a
a
en el que se ve la dependencia del periodo de existencia de la solución respecto de
las condiciones iniciales y los controles.
Hay sistemas de control de lo más variados, presentamos algunos de ellos:
1. Sistemas diferenciales: Son los sistemas en los que la función de transición
de estados es la solución de un Problema de Condiciones Iniciales (P.C.I.). Los
elementos definitorios son:
(i) T Ă R es un intervalo abierto.
(ii) U Ă Rm , Y Ă Rp y X Ă Rn abiertos.
(iii) Supondremos en todo lo que sigue que U es el conjunto de las funciones
continuas o continuas a trozos.
4.2 El modelo de Espacio-Estado. Formalismo
63
(iv) xptq “ ψpt; t0 , x0 , up¨qq es la única solución del P.C.I.1
"
9
xptq
“ f pt, xptq, uptqq, t ě t0 , t P T
xpt0 q “ x0
(4.6)
(v) η : T ˆ X ˆ U Ñ Y es continua.
2. Sistemas recursivos o en diferencias finitas: En estos sistemas la función
de transición de estados también es la solución de un Problema de Condiciones Iniciales pero de sistemas dados por ecuaciones en recurrencias (también
llamados en diferencias finitas):
(i) T “ N o Z.
(ii) U, X, Y conjuntos no vacı́os
(iii) xptq “ ψpt; t0 , x0 , up¨qq es la única solución del sistema en diferencias
finitas
xpt ` 1q “ f pt, xptq, uptqq
con la condición inicial xpt0 q “ x0 con t0 P T , x0 P X y t ě t0 .
(iv) La función de salidas es cualquier tipo de aplicación η : T ˆ X ˆ U Ñ Y .
3. Sistemas Lineales: Un sistema es lineal si:
(i) U , U, X, Y son espacios vectoriales sobre K (un cuerpo).
(ii) Las aplicaciones
ψpt; t0 , ¨, ¨q :
X ˆU
px0 , up¨qq
ηpt, ¨, ¨q :
X ˆU
pxptq, uptqq
Ñ
X
Ñ ψpt; t0 , x0 , up¨qq
Ñ
Y
Ñ ηpt, xptq, uptqq
(4.7)
son lineales para todo t, t0 P T , t ě t0 .
En particular, dado que ψpt; t0 , ¨, ¨q es lineal,
ψpt; t0 , 0X , 0U q “ 0X ,
t, t0 P T , t ě t0
También, por ser ψ y η lineales:
˜
¸
k
k
k
ÿ
ÿ
ÿ
0
ψ t; t0 , λi xi , λi ui p¨q “
λi ψpt; t0 , x0i , ui p¨qq,
i“1
1
i“1
(4.8)
(4.9)
i“1
Existen varios teorema de existencia y unicidad de soluciones para sistemas diferenciales con
una condición inicial en los que gpt, xq “ f pt, x, uptqq no es continua respecto de t. El Teorema de
Carathéodory ([9, Sec. 2.1.2]) es nuestra referencia principal en este curso.
64
El modelo de espacio-estado
y
˜
η t,
k
ÿ
i“1
λi xi ptq,
k
ÿ
i“1
λi ui ptq
¸
“
k
ÿ
i“1
λi ηpt, xi ptq, ui ptqq.
(4.10)
Estas ecuaciones expresan el principio de superposición para los estados y las salidas:
la salida de una suma de estados y entradas es la suma de las salidas de cada uno de
los estados y entradas. Como caso especial obtenemos el principio de descomposición:
ψpt; t0 , x0 , up¨qq “ ψpt; t0 , x0 , 0U q ` ψpt; t0 , 0X , up¨qq,
que muestra que las trayectorias de los sistemas lineales se descomponen en una suma
de dos términos: un movimiento libre: t Ñ ψpt; t0 , x0 , 0U q que depende exclusivamente del estado inicial del sistema x0 ; y un movimiento forzado: t Ñ ψpt; t0 , 0X , up¨qq
que depende sólo de la entrada o control up¨q. Y en relación con estos dos tipos de
movimientos tenemos los siguientes casos especiales de (4.9): si ponemos ui p¨q “ 0U
entonces obtenemos la ley de superposición para el movimiento libre
˜
¸
k
k
k
ÿ
ÿ
ÿ
ψ t; t0 , λi x0i , λi 0U “
λi ψpt; t0 , x0i , 0U q;
(4.11)
i“1
i“1
i“1
y si ponemos x0i “ 0X obtenemos la ley de superposición del movimiento forzado
˜
¸
k
k
ÿ
ÿ
ψ t; t0 , 0x , λi ui p¨q “
λi ψpt; t0 , 0X , ui p¨qq.
(4.12)
i“1
i“1
Los mismos conceptos pueden aplicarse a las salidas del sistema y en tal caso habları́amos de los principios de descomposición y superposición para los movimientos
libre y forzado respecto a las salidas. O, mejor, de la respuesta del sistema al movimiento libre (o control cero) y de la respuesta del sistema al movimiento forzado (o
al estado inicial cero), respectivamente.
En dimensión finita, los sistemas diferenciales y en diferencias finitas están definidos a partir de sistemas de ecuaciones lineales:
"
Sistemas Diferenciales
9
xptq
“ Aptqxptq ` Bptquptq
yptq “ Cptqxptq ` Dptquptq
"
Sistemas en Diferencias
xpt ` 1q “ Aptqxptq ` Bptquptq
yptq “ Cptqxptq ` Dptquptq
(4.13)
Es decir, los estados son soluciones de problemas de condiciones iniciales de sistemas
de ecuaciones diferenciales (o en diferencias finitas) lineales y las salidas en cada
instante t son combinaciones lineales de los estados del sistema y de los controles en
dicho instante. El sistema del Ejemplo 4.1 es un sistema diferencial lineal.
4.2 El modelo de Espacio-Estado. Formalismo
65
Las matrices (de funciones) Aptq, Bptq, Cptq y Dptq en (4.13) reciben nombres
especiales: a Aptq se le llama matriz de estados, a Bptq matriz de entradas
o controles, a Cptq matriz de salidas desde los estados y a Dptq matriz de
salidas desde las entradas o controles. Con frecuencia Dptq es la matriz cero y
en tales casos se dice que Cptq es la matriz de salidas.
En el caso de sistemas diferenciales supondremos que las funciones matriciales
Ap¨q P P CpT , Rnˆn , Bp¨q P P CpT , Rnˆm , Cp¨q P P CpT , Rpˆn y Dp¨q P P CpT , Rpˆm
donde T Ă R es un intervalo y P CpT , Rq es el espacio vectorial (respecto a R)
de las funciones continuas a trozos definidas en el interval T y con valores reales.
Supondremos también, como ya se ha dicho, que U “ P CpT , Rm q. Se cumplen
entonces las condiciones de Carathéodory de existencia y unicidad de soluciones en
todo T del P.C.I.
"
9
xptq
“ Aptqxptq ` Bptquptq, t P T
xpt0 q “ x0
para todo up¨q P U, t0 P T y x0 P X “ Rn . La solución de estos sistemas xptq “
ψpt; t0 , x0 , up¨qq son funciones continuas en T y diferenciables en todo T excepto
en los puntos de discontinuidad de Ap¨q, Bp¨q y up¨q. Mucha de la teorı́a se puede
desarrollar también para sistemas en C pero nos restringiremos a sistemas reales (es
decir, sobre R).
En este curso sólo trabajaremos los sistemas diferenciales con especial atención
a los lineales. En particular, en esta lección nos centraremos en el estudio de las
soluciones de los sistemas lineales mientras que las propiedades de controlabilidad,
observabilidad y estabilidad de los mismos serán estudiadas en lecciones posteriores.
También se hará una breve incursión en estas mismas propiedades para sistemas no
lineales.
4.2.1.
Estados de Equilibrio o Estacionarios
Hay estados para ciertos sistemas que adquieren importancia especial: son los
estados estacionarios o de equilibrio. Supongamos que tenemos un sistema sobre el
que actúa una función de control up¨q y cuya función de transición de estados es
ψpt; t0 , x0 , up¨qq; es decir, el estado en el instante t es
xptq “ ψpt; t0 , x0 , up¨qq P X,
t ě t0 , t0 , t P T .,
donde X es el espacio de estados para el sistema. Un estado x̄ P X es un estado de
equilibrio o estacionario de un sistema bajo el control up¨q si
ψpt; t0 , x̄, up¨qq “ x̄
66
El modelo de espacio-estado
parar todo t P T con t ě t0 . En otras palabras, los estados estacionarios son los
estados xptq tales que si xpt0 q “ x̄ entonces xptq “ x̄ para todo t P T con t ě t0 . Se
trata pues de estados que se mantienen constantes durante su periodo de existencia.
Tal y como hemos visto en (4.8) para los sistemas lineales:
ψpt; t0 , 0X , 0U q “ 0X ,
t, t0 P T , t ě t0 ,
lo que indica que el estado cero, 0X , es siempre un estado estacionario de los sistemas
lineales cuando el control es la función nula: uptq “ 0 para todo t P T , t ě t0 . Esto
es fácil de comprobar en los sistemas finito-dimensionales. En efecto, en tal caso las
ecuaciones de estados con control cero son:
9
xptq
“ Aptqxptq,
de modo que xptq “ 0 es una solución del sistema cuando el sistema está en reposo en
el instante inicial; es decir, xpt0 q “ 0. Lo mismo sucede en los sistemas en diferencias
finitas.
Para los sistemas diferenciales generales
"
9
xptq
“ f pt, xptq, uptqq,
pΣq
xpt0 q “ x0
t ě t0 , t P T
los estados estacionarios son las soluciones de equilibrio; es decir, las soluciones xe
que cumplen lo siguiente: si en un instante inicial t0 P T el estado es xpt0 q “ xe y el
sistema está bajo el control de ũp¨q entonces el estado de Σ es xptq “ xe para todo
t ě t0 , t P T . En otras palabras, los estados estacionarios bajo el control ũp¨q son
9
las soluciones constantes de xptq
“ f pt, x, ũptqq. Es decir, las que cumplen:
f pt, xe , ũptqq “ 0, para todo t ě t0 , t P T .
Veremos a continuación un par de ejemplos.
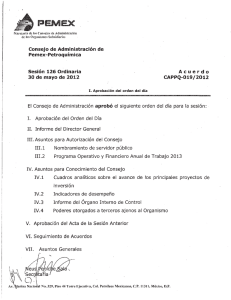
Ejemplo 4.3 Consideremos el péndulo invertido de la
Figura 4.1. Se quiere aplicar una fuerza en la base del
péndulo amortiguado para devolverlo a la posición vertical. Recordando la expresión para el par de fuerzas:
9
xptqF2 ptq ´ yptqF1 ptq “ N ptq “ mr2 ωptq:
: “ ´cθptq
9 ` mg` sen θptq ` uptq` cos θptq,
m`2 θptq
Figura 4.1: Control
del péndulo invertido
donde c es la constante de amortiguamiento producido, por ejemplo, por el rozamiento sobre el brazo del
1
péndulo. Suponiendo, por sencillez que ` “ g “ c “
m
y suprimiendo el argumento t:
θ: “ ´θ9 ` sen θ ` u cos θ.
4.2 El modelo de Espacio-Estado. Formalismo
67
Para obtener las ecuaciones del espacio-estado realizamos el cambio de variables
9 De esta manera el sistema de primer orden equivalente es:
habitual: x1 “ θ, x2 “ θ.
"
x9 1 “ x2
x9 2 “ ´x2 ` sen x1 ` u cos x1
„
x
Ası́ pues, si x “ 1
x2
„
x2
f pt, x, uq “
.
´x2 ` sen x1 ` u cos x1
Los estados estacionarios bajo el control up¨q son las soluciones constantes de f pt, x, uq “
0. Si consideramos el control cero (uptq “ 0) entonces
„
x2
,
f pt, x, 0q “
´x2 ` sen x1
de modo que f pt, x, 0q “ 0 si y sólo si x2 “ 0 y x1 “ kπ, k “ 0, ˘1, ˘2, . . . En
efecto, los estados estacionarios corresponden a la posición vertical (arriba o abajo)
del péndulo porque en ausencia de una acción externa, el péndulo permanecerı́a en
dicha posición indefinidamente.
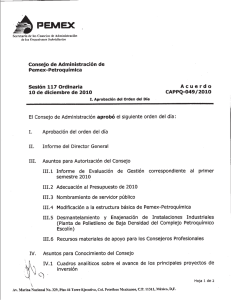
Ejemplo 4.4 Se trata de modelizar el movimiento de un satélite de comunicaciones.
Éstos reciben y emiten ondas electromagnéticas desde y hacia radares situados en la
superficie terrestre. A fin de no tener que estar moviendo estos radares para apuntar
continuamente al satélite, se intenta que éste ocupe una posición fija relativamente
a ellos. Las órbitas que deben describir dichos satélites se llaman geosı́ncronas.
Figura 4.2: Satélite en órbita estacionaria.
Para simplificar el modelo supondremos que el movimiento del satélite se hace
en el plano del Ecuador. Tomaremos el centro de la Tierra como origen de coordenadas, usaremos coordenadas polares pr, θq. Denotamos la masa de la Tierra por MT
(5,973 ˆ 1019 Kgr., aproximadamente), por MS la del satélite, por G la constante
68
El modelo de espacio-estado
de gravitación universal (6,67428 ˆ 10´11 N¨m2 /kgr2 ) y por Ω la velocidad angular
de la Tierra (7,27 ˆ 10´5 rad/seg). Supondremos que el satélite está dotado de dos
propulsores que pueden impulsarlo en la dirección radial y tangencial con fuerzas
Fr y Fθ . Aplicando las leyes de Newton, las siguientes ecuaciones proporcionan las
posibles trayectorias que describe el satélite:
$
& M r:ptq “ M rptqθptq
9 2 ´ GMT MS ` Gr ptq ` Fr ptq
S
S
rptq2
(4.14)
%
:
9
9 θptq ` Gθ ptq ` Fθ ptq
MS rptqθptq “ ´2MS rptq
Estas ecuaciones son el resultado de tener en cuenta las diversas fuerzas a las
que está sometido el satélite: La fuerza debida al movimiento del satélite alrededor
de la Tierra (F~ “ m ¨ ~a), la fuerza de atracción de masas, la fuerza debida a los
motores y la fuerza perturbadora y, posiblemente mucho más débil que las demás,
ejercida por la Luna, el Sol, otros planetas, viento solar, etc. y que las hemos reunido
en Gr y Gθ
Para calcular la fuerza debida al movimiento, se toman vectores unitarios ~er y
~eθ en las direcciones radial y tangencial de la trayectoria del satélite. Ası́ ~er “ ~er ptq
y ~eθ “ ~eθ ptq son vectores que cambian en cada instante de tiempo y si ~rptq es el
vector de posición del satélite; es decir, el que une el centro de masa de la Tierra
con el del satélite, la trayectoria de éste está determinada por la función vectorial
~rptq “ rptq~er ptq, siendo rptq el módulo del vector (de forma general consideramos una
partı́cula que se mueve alrededor de la Tierra pero a una distancia no constante).
Un cálculo simple muestra que para cada instante fijo t,
~er pt ` hq ´ ~er ptq “ ´p1 ´ cospθpt ` hq ´ θptqqq~er ptq ` senpθpt ` hq ´ θptqq~eθ ptq
~eθ pt ` hq ´ ~eθ ptq “ ´ senpθpt ` hq ´ θptqq~er ptq ` p1 ´ cospθpt ` hq ´ θptqqq~eθ ptq.
Ahora bien, para h próximo a 0, y suponiendo θ infinitamente diferenciable, podemos
desarrollar esta función en serie de Taylor cerca de t:
9 ` gphq “ θptq ` hωptq ` gphq
θpt ` hq “ θptq ` hθptq
gphq
“ 0. Hacemos lo mismo con las funciones seno y coseno cerca de 0
hÑ0 h
(recordemos que t está fijo):
donde lı́m
cospθpt ` hq ´ θptqq “ cospωptqh ` gphqq “ 1 ` f phq,
senppθpt ` hq ´ θptqq “ senpωptqh ` gphqq “ ωptqh ` gphq ` mphq
f phq
mphq
“ 0 y lı́m 2 “ 0 y donde ωptq es la velocidad angular del satélite
hÑ0 h
hÑ0 h
con lı́m
4.2 El modelo de Espacio-Estado. Formalismo
69
en el instante fijo t. Por lo tanto,
~er pt ` hq ´ ~er ptq
dθ
d~er
ptq “ lı́m
“ ωptq~eθ ptq “
ptq~eθ ptq
hÑ0
dt
h
dt
d~eθ
~eθ pt ` hq ´ ~eθ ptq
dθ
ptq “ lı́m
“ ´ωptq~er ptq “ ´ ptq~er ptq.
hÑ0
dt
h
dt
Se sigue entonces que
d~r
dr
dθ
“ ~er ` r ~eθ ,
dt
dt
dt
y
d2~r
“
dt2
˜
d2 r
´r
dt2
ˆ
dθ
dt
˙2 ¸
ˆ
˙
d2 θ
dr dθ
~er ` r 2 ` 2
~eθ .
dt
dt dt
Usando la terminologı́a de la Fı́sica:
d2 r
= aceleración debida al cambio de posición del satélite en la dirección
dt2
radial,
r
ˆ
dθ
dt
˙2
= aceleración centrı́peta,
d2 θ
r 2 = aceleración debida al cambio de posición del satélite en la dirección
dt
tangencial,
2
dr dθ
= aceleración de Coriolis.
dt dt
Aplicando las leyes de Newton:
˜
ˆ ˙2 ¸
ˆ 2
˙
d2~r
d2 r
dθ
dθ
dr dθ
MS 2 “ MS
´r
~er ` Ms r 2 ` 2
~eθ .
dt
dt2
dt
dt
dt dt
Por otra parte, la fuerza de atracción de masas es
GMT MS
F~g “ ´
~er
rptq2
Y las fuerzas de los motores del satélite y de la perturbación son:
F~m “ Fr~er ` Fθ~eθ ,
F~p “ Gr~er ` Gθ~eθ
70
El modelo de espacio-estado
En el sistema de referencia no inercial correspondiente al satélite la fuerza total
que actúa sobre el mismo es nula (en otras palabras, “en el satélite no se nota que
haya ninguna fuerza cuyo origen esté en el mismo satélite”). Por consiguiente:
MS
˜
d2 r
´r
dt2
ˆ
dθ
dt
˙2 ¸
~er ` MS
ˆ
˙
d2 θ
dr dθ
r 2 `2
~eθ ´ F~g “ F~m ` F~p .
dt
dt dt
Igualando las componentes radial y tangencial obtenemos (4.14).
En una primera aproximación vamos a suponer que las fuerzas Gr y Gθ son despreciables respecto a las demás. A fin de simplificar la expresión (4.14) renombramos
Fr “ Fr {MS , y Fθ “ Fθ {MS , obteniendo ası́:
$
&
GMT
` Fr ptq
rptq2
%
:
9 ` Fθ ptq
rptqθptq
“ ´2rptq
9 θptq
9 2´
r:ptq “ rptqθptq
(4.15)
Para obtener las ecuaciones de espacio-estados podrı́amos hacer el cambio de varia9
9
x3 ptq “ θptq y x4 ptq “ θptq.
bles habitual: x1 ptq “ rptq, x2 ptq “ rptq,
Sin embargo,
este cambio de variables no tendrı́a en cuenta que se quiere que el satélite mantenga
una posición constante respecto de la Tierra. Es decir, que gire a la misma velocidad
angular que la Tierra (recordemos que la hemos denotado con Ω y que su valor es
7,27 ˆ 10´5 rad/seg). El cambio de variables apropiado entonces es:
9 ´ Ω,
9
x1 ptq “ rptq, x2 ptq “ rptq,
x3 ptq “ θptq ´ pθ0 ` Ωtq y x4 ptq “ θptq
donde θ0 es el ángulo inicial de la posición del satélite respecto de un punto de
referencia prefijado (por ejemplo, el meridiano cero). Por lo tanto, x3 p0q “ 0. El
sistema que se obtiene es:
fi
»
x2 ptq
»
fi
ffi
—
GMT
x9 1 ptq
2
ffi
—
—x9 2 ptqffi —x1 ptqpx4 ptq ` Ωq ´ x1 ptq2 ` Fr ptqffi
ffi
—
ffi “ —
ffi
–x9 3 ptqfl —
x
ptq
4
ffi
—
–
2x2 ptqpx4 ptq ` Ωq Fθ ptq fl
x9 4 ptq
´
`
x1 ptq
x1 ptq
Vamos a estudiar los estados estacionarios de este sistema con control nulo Fr ptq “
Fθ ptq “ 0. Estamos presuponiendo que x1 ptq “ rptq ‰ 0 (lo contrario significarı́a
que el satélite está en el centro de masa de la Tierra). En particular, los estados
estacionarios deben cumplir este requerimiento. Como para los estados estacionarios
x1 ptq debe ser constante (digamos R0 ), tendremos x1 ptq “ R0 . Como x1 ptq y x3 ptq
4.3 Sistemas Lineales
71
son constantes, x2 ptq “ x4 ptq “ 0. Ahora bien, esto implica (sustituyendo en la
ecuación de x9 2 ) que
0 “ x1 ptqΩ2 ´
GMT
GMT
.
“ R0 Ω2 ´
2
x1 ptq
R02
Por lo cual
R0 “
ˆ
GMT
Ω2
˙ 31
(4.16)
es el valor de x1 ptq para el estado estacionario. Finalmente, x3 ptq es constante y
x3 p0q “ 0. Esto implica que x3 ptq “ 0 para todo t ą 0. En definitiva, el estado de
equilibrio a control constante es pR0 , 0, 0, 0q. En términos de rptq y θptq, esto significa
que el estado estacionario corresponde a
rptq “ R0 ,
θptq “ θ0 ` Ωt,
t ě 0.
Es decir, el estado estacionario a control constante determina una trayectoria del
˙1
ˆ
GMT 3
) y con la misma velocidad ansatélite a distancia fija de la Tierra (R0 “
Ω2
gular que la Tierra. Esto es lo que se llama una órbita geoestacionaria y geosı́ncrona.
4.3.
Sistemas Lineales
Consideremos el siguiente sistema lineal con una condición inicial para el estado:
$
9
“ Aptqxptq ` Bptquptq
& xptq
yptq “ Cptqxptq ` Dptquptq
tPT
(4.17)
%
0
xpt0 q “ x ,
donde Aptq P Rnˆn , Bptq P Rnˆm , Cptq P Rpˆn y Dptq P Rpˆm para todo t P T .
Tal y como hemos comentado más arriba, bajo la hipótesis de continuidad a
trozos de Ap¨q, Bp¨q y up¨q en un intervalo de tiempo T , el Problema de Condición
Inicial (P.C.I.)
"
xptq
9
“ Aptqxptq ` Bptquptq
tPT
(4.18)
xpt0 q “ x0 ,
tiene solución única. Ésta se puede obtener por el método de variación de las constantes:
żt
0
0
xptq “ ψpt; t0 , x , up¨qq “ Φpt, t0 qx `
Φpt, sqBpsqupsqds, t P T
(4.19)
t0
72
El modelo de espacio-estado
donde Φpt, t0 q es una matriz fundamental de soluciones del sistema
9
xptq
“ Aptqxptq;
(4.20)
es decir, cada columna de Φpt, t0 q es solución de este sistema. En algunos tratados
(ver por ejemplo [9]) se diferencia el operador evolución: Φpt, t0 q : Rn Ñ Rn definido
por Φpt, t0 qx “ ψpt; t0 , x0 , 0U q de la matriz de este operador en las bases canónicas.
Nosotros no haremos distinción entre el operador y la matriz que lo representa.
Y dada la estrecha relación, (4.19), entre la función de transición de estados ψ y
Φpt, t0 q, a esta matriz se le suele llamar Matriz de Transición de Estados y es
ésta la denominación que usaremos de ahora en adelante.
Dado que cada una de las columnas de Φpt, t0 q es solución del sistema (4.20) y
cumple la condición inicial xpt0 q “ x0 , concluı́mos que Φpt, t0 q es la única solución
del P.C.I. matricial:
"
9
Xptq
“ AptqXptq, t P T
Xpt0 q “ In
9 t0 q “ AptqΦpt, t0 q columna
donde In es la matriz identidad de orden n. En efecto, Φpt,
0
a columna y, sustituyendo en (4.19), para cada x P Rn , x0 “ xpt0 q “ Φpt0 , t0 qx0 .
Esto significa que Φpt0 , t0 q “ In necesariamente. Esta caracterización de Φpt, t0 q
permite demostrar propiedades importantes de esta matriz que se proponen como
ejercicios.
Por otra parte la función de salida para el sistema (4.17) será:
yptq “ ηpt; t0 , x0 , up¨qq “ Cxptq ` Dptquptq “
żt
0
“ CΦpt, t0 qx `
CΦpt, sqBpsqupsqds ` Duptq,
t0
tPT.
(4.21)
No hay fórmulas explı́citas para calcular las matrices de transición de estados
para sistemas lineales generales, pero sı́ para el caso en que la matriz Aptq no depende
del tiempo (es constante); es decir, sistemas de la forma:
"
9
xptq
“ Axptq ` Bptquptq
.
(4.22)
xpt0 q “ x0
En este caso, la matriz de transición de estados es la matriz exponencial:
Φpt, t0 q “ eApt´t0 q .
La matriz exponencial eAt se puede definir de varias formas equivalentes. La más
rápida y conveniente para este curso es la que se obtiene a partir de una serie de
potencias matriciales:
8 k
ÿ
t k
A , t P R.
(4.23)
eAt “
k!
k“0
4.3 Sistemas Lineales
73
8
ÿ
1 k
A converge para toda matriz
k!
k“0
A siempre que en Rnˆn ( conjunto de matrices de números reales de n filas y n
columnas) consideremos las normas de matriz habituales. Por ello es perfectamente
razonable definir eA como el lı́mite de esta serie.
Se puede demostrar que la serie de potencias
De la definición se desprende que
d At
e “ AeAt ,
dt
de modo que Φpt, t0 q “ eApt´t0 q es la única solución del P.C.I.
"
9
Xptq
“ AXptq, t P T
Xpt0 q “ In .
Por lo tanto, tal y como se ha mencionado más arriba, Φpt, t0 q “ eApt´t0 q es la matriz
de transición de estados del sistema (4.22).
4.3.1.
Sistemas lineales invariantes en el tiempo
Los sistemas lineales invariantes en el tiempo son aquellos en los que todas las
matrices (de estados, controles y salidas) son independientes del tiempo; es decir,
son constantes:
"
9
xptq
“ Axptq ` Buptq, t P R A P Rnˆn , B P Rnˆm
(4.24)
yptq “ Cxptq ` Duptq
C P Rpˆn , D P Rpˆm
Estos sistemas son los más sencillos y más estudiados. En realidad son los modelos de
espacio-estado de los sistemas estudiados en el Capı́tulo 3 en términos de la función
de transferencia.
Dado que la matriz de transición de estados para los sistemas lineales con A
constante es Φpt, t0 q “ eApt´t0 q , la función de transición de estados (solución) para
estos sistemas se puede dar explı́citamente (ver (4.19)):
xptq “ e
Apt´t0 q 0
x `
żt
eApt´sq Bupsqds,
t0
tPT.
En consecuencia, la respuesta del sistema será:
żt
Apt´t0 q 0
yptq “ Cxptq ` Duptq “ Ce
x `
CeApt´sq Bupsqds ` Duptq.
t0
(4.25)
(4.26)
74
El modelo de espacio-estado
En la práctica, el cálculo de la matriz eApt´t0 q no es una tarea sencilla y se basa,
por lo general, en el cálculo de los valores y vectores propios (generalizados) de la
matriz de estados A. Es conocido que dada una matriz A P Rnˆn , existe una matriz
no singular (determinante distinto de cero) T P Cnˆn , de números complejos, tal
que
T ´1 AT “ J,
donde
»
—
J “–
J1
..
fi
.
Jr
ffi
fl
»
—
—
—
y Jk “ —
—
–
λk 1
0 ¨¨¨ 0
0 λk 1 ¨ ¨ ¨ 0
..
.. . . . .
.
.
. ..
.
.
0 0 ¨ ¨ ¨ λk 1
0 0 ¨ ¨ ¨ 0 λk
fi
ffi
ffi
ffi
ffi P Cnk ˆnk .
ffi
fl
(4.27)
La matriz J, diagonal por bloques, recibe el nombre de Forma Normal de Jordan
de A. Los números, λk , que aparecen en la diagonal de cada uno de los bloques Jk , son
los valores propios (quizá repetidos) de A. En general son números complejos porque
son las raı́ces del polinomio caracterı́stico de A; es decir, las raı́ces del polinomio que
se obtiene al calcular detpλIn ´ Aq.
Para muchas matrices (casi todas en un cierto
todos distintos. En tal caso, nk “ 1 y
»
λ1
—0
—
J “ Diagpλ1 , λ2 , . . . , λn q “ — ..
–.
0
sentido) sus valores propios son
fi
0 ¨¨¨ 0
λ2 ¨ ¨ ¨ 0 ffi
ffi
.. . .
.. ffi
. . fl
.
0 ¨ ¨ ¨ λn
En este caso, las columnas de las matrices T para las que T ´1 AT “ J son vectores
propios de A (la i-ésima columna de T es vector propio de A asociado al valor propio
λi ). Cuando J no es diagonal, a las columnas de T se les llama vectores propios
generalizados para los correspondientes valores propios que forman los bloques de
Jordan Jk .
Es fácil ver, utilizando la definición de eA como serie de potencias, que si
T ´1 AT “ J entonces
eAt “ T eJt T ´1 .
(4.28)
Además, de la propia definición se tiene también que
» Jt
fi
e1
—
ffi
..
eJt “ –
fl .
.
Jr t
e
4.3 Sistemas Lineales
75
Ahora bien cada bloque en la diagonal de la forma de Jordan se puede escribir como
»
fi
0 1 0 ¨¨¨ 0
—0 0 1 ¨ ¨ ¨ 0ffi
—
ffi
— .. .. . . . . .. ffi
Jk “ λk Ink ` Nk , con Nk “ — . .
.
. . ffi
—
ffi
–0 0 0 ¨ ¨ ¨ 1fl
0 0 0 ¨¨¨ 0
y donde Ink es la matriz identidad de orden (o tamaño) nk . Se comprueba sin dificultad que Nknk “ 0 y, en consecuencia, en el desarrollo de la serie de potencias
eJk t “
8 i
ÿ
t
i!
i“0
Jki “ eλk
8 i
ÿ
t
i!
i“0
Nki ,
t P R.
sólo hay un número finito de sumandos no nulos. En definitiva, sumando los términos
no nulos se obtiene
»
fi
t2
tnk ´2
tnk ´1
— 1 t 2! ¨ ¨ ¨ pnk ´ 2q! pnk ´ 1q! ffi
—
ffi
—
tnk ´2 ffi
tnk ´3
— 0 1 t ¨¨¨
ffi
—
ffi
pn
´
3q!
pn
´
2q!
k
k
—
ffi
Jk t
λk t — .
..
..
ffi .
e “ e — .. ... . . . . . .
(4.29)
.
.
ffi
ffi
—
2
t
—
ffi
..
.
— 0 0 0
ffi
t
—
ffi
2!
– 0 0 0 ¨¨¨
fl
1
t
0 0 0 ¨¨¨
0
1
Finalmente, si λk “ ak ` ibk entonces
eλk t “ eak t eibk t “ eak t pcospbk tq ` i senpbk tqq.
El siguiente ejemplo, en el que se estudian las soluciones del oscilador armónico
amortiguado, es ilustrativo de este proceso.
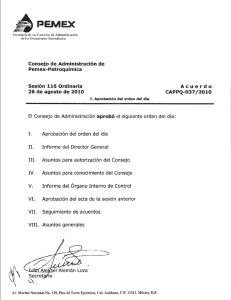
Ejemplo 4.5 (Oscilador Armónico Amortiguado Lineal) Vimos en el Capı́tulo 2 que las ecuaciones que rigen el comportamiento dinámico de los sistemas en las
Figuras 4.3, 4.4, 4.5 son las mismas:
9 ` kxptq “ uptq
m:
xptq ` cxptq
9
xp0q “ x0 , xp0q
“ v0 .
(4.30)
En cada caso, por supuesto, el significado de m, c, k y u es diferente, pero estos tres
sistemas tienen un comportamiento dinámico que puede modelizarse con la misma
76
El modelo de espacio-estado
Figura 4.3: Sistema masaFigura 4.4: Cuerpo rı́gidos Figura 4.5: Circuito eléctrimuelle con amortiguamienco simple
en rotación
to
ecuación. Diremos que (4.30) es la ecuación del oscilador armónico amortiguado (si
c ‰ 0) lineal. Por consiguiente, los tres sistemas son modelos fı́sicos diferentes de
dicho oscilador.
La forma en la que se suele presentar la ecuación de los osciladores lineales no
es (4.30) sino una equivalente que se obtiene al hacer las sustituciones
c
k
c
, ζ“ ? .
ω0 “
m
2 km
A ω0 se le conoce con el nombre de frecuencia natural del sistema y a ζ como la
razón de amortiguamiento. Con esta sustitución el sistema de (4.30) se convierte
en
: ` 2ζω0 x9 ` ω02 x “ kω02 uptq,
(4.31)
x
1
donde hemos sustituı́do k por para simplificar la notación.
k
Las ecuaciones del modelo espacio-estado correspondiente a esta ecuación se ob9
tienen mediante el cambio de variables: x1 ptq “ xptq y x2 ptq “ xptq.
Ası́ el problema
de condiciones iniciales (4.30) es equivalente a:
„ „
„
„
„ „
x9 1
0
1
x1
0
x1 p0q
x
“ 0
(4.32)
“
`
2
2 uptq,
x9 2
´ω0 ´2ζω0 x2
kω0
x2 p0q
v0
Como una aplicación simple de la forma de Jordan, vamos a analizar la dinámica de
los osciladores lineales en movimiento libre; es decir, cuando no hay fuerzas externas
actuando sobre él (uptq “ 0). En este caso la ecuación diferencial (4.31) queda:
: ` 2ζω0 x9 ` ω02 x “ 0.
x
Y las ecuaciones en espacio-estado:
„ „
„
x9 1
0
1
x1
“
,
2
x9 2
´ω0 ´2ζω0 x2
„
„
x1 p0q
x
“ 0
x2 p0q
v0
(4.33)
(4.34)
4.3 Sistemas Lineales
77
Calculamos los valores propios de la matriz de estados:
„
λ
´1
“ λ2 ` 2ζω0 λ ` ω02
det 2
ω0 λ ` 2ζω0
´
¯´
¯
a
a
“ λ ` ζω0 ` ω0 ζ 2 ´ 1 λ ` ζω0 ´ ω0 ζ 2 ´ 1 .
Ası́ pues, la matriz de estados puede tener valores propios reales y distintos (si ζ ą 1),
complejos no reales conjugados (si 0 ă ζ ă 1) o un valor propio real doble (si ζ “ 1).
Analizaremos el comportamiento de las soluciones del sistema (trayectorias) en cada
caso. Recordemos que la solución de (4.34) es
„
„
x1 ptq
At
Jt ´1 x0
“ e “ Te T
x2 ptq
v0
„
0
1
donde A “
es la matriz de estados, T es una matriz de vectores
2
´ω0 ´2ζω0
propios (o vectores propios generalizados) de A y J es su forma de Jordan.
1. ζ ą 1. En este caso ζ 2 ´ 1 ą 0, y la matriz de estados A tiene dos valores
a
a
propios reales distintos λ1 “ ´ζω0 ´ ω0 ζ 2 ´ 1 y λ2 “ ´ζω0 ` ω0 ζ 2 ´ 1.
Su forma de Jordan es J “ Diagpλ1 , λ2 q y
»
fi
¯
´ ?
´ω0 ζ` ζ 2 ´1 t
0
e
´ ?
¯ fl .
eJt “ –
´ω0 ζ´ ζ 2 ´1 t
0
e
“
‰
“
‰
Ahora, si T “ t1 t2 y T ´1 “ p
t1 p
t2 son las matrices T y T ´1 escritas en
función de sus columnas, entonces
„
ı
”
¯
´ ?
¯
´ ?
x0
2 ´1 t
2 ´1 t
´1
Jt
ζ
´ω
ζ´
ζ
´ω
ζ`
“ x0 p
t1 ` v0p
t2 .
Te “ e 0
t1 e 0
t2 , T
v
0
Observemos
que x0p
t1 ` v0p
t2 es un vector columna y escrı́bamoslo x0p
t1 ` v0p
t2 “
„
a
. Se tiene entonces
b
„
„
„
´ ?
¯
´ ?
¯
x1 ptq
´ω0 ζ` ζ 2 ´1 t
´ω0 ζ´ ζ 2 ´1 t
At x0
Jt ´1 x0
“e
“ Te T
“ ae
t1 ` be
t2 .
x2 ptq
v0
v0
En palabras, tanto el desplazamiento x1 ptq como la velocidad x´2 ptq? “ x9¯1 ptq
son ´combinaciones
lineales de las funciones exponenciales e
¯
?
´ω0 ζ´ ζ 2 ´1 t
e
.
´ω0 ζ`
ζ 2 ´1 t
y
La Figura 4.6 muestra las gráficas del desplazamiento y la velocidad de un
sistema en el que ζ ą 1. El sistema se dice que es sobreamortiguado.
78
El modelo de espacio-estado
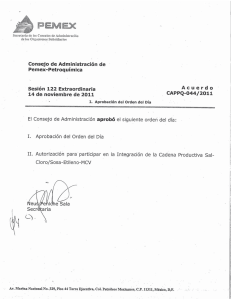
Figura 4.6: Trayectoria de Figura 4.7: Trayectoria de Figura 4.8: Trayectoria de
un oscilador lineal con so- un oscilador lineal subamor- un oscilador lineal crı́ticamente amortiguado .
breamortiguamiento.
tiguado.
2. 0 ă ζ ă 1. En este caso ζ 2 ´ 1 ă 0 y la matriz de estados tiene dos valores
a
complejos (no reales) conjugados. Es decir, si ωd “ ω0 1 ´ ζ 2 (cantidad que se
conoce con el nombre de frecuencia de amortiguamiento) entonces los valores
propios de A son λ1 “ ´ζω0 ` ωd i y λ2 “ ´ζω0 ´ ωd i.
De esta forma tenemos:
„ p´ζω0 `ω iqt
d
e
0
Jt
e
“
0„
ep´ζω0 ´ωd iqt
0
´ζω0 t cospωd tq ` i senpωd tq
“ e
0
„
cospω
„ d tq ´ i senpωd tq
cospω
tq
0
senpωd tq
0
d
“ e´ζω0 t
`i
0
cospωd tq
0
´ senpωd tq
Aparentemente las soluciones van a ser funciones complejas. Sin embargo, los
vectores propios de A se pueden escoger de forma que sean también complejos
conjugados y tras ciertas manipulaciones algebraicas (ver por ejemplo [7, pp
80–90]) se puede ver que se puede elegir de forma adecuada una matriz T de
forma que
„
„
„
x1 ptq
At x0
Jt ´1 x0
“e
“ Te T
“ e´ζω0 t pa cospωd tq ` b senpωd tqq
x2 ptq
v0
v0
donde a y b son vectores columna reales de 2 componentes. Vemos ası́ que,
también en este caso, tanto el desplazamiento x1 ptq como la velocidad x2 ptq “
x9 1 ptq son productos de la función exponencial e´ζω0 t y de una combinación
lineal de las funciones cospωd tq y senpωd tq.
La Figura 4.7 muestra las gráficas del desplazamiento y la velocidad de un
sistema en el que 0 ă ζ ă 1. El sistema se dice que es subamortiguado.
3. ζ “ 1. Los sistemas con razón de amortiguamiento igual a 1 se llaman sistemas
crı́ticamente amortiguados. Tienen un único valos propio doble: ´ω0 por
4.3 Sistemas Lineales
79
lo que la forma de Jordan de la matriz de estados es
„
´ω0
1
J“
.
0 ´ω0
Ası́, ((4.29)))
Jt
e
“e
´ω0 t
„
1 t
.
0 1
Y si A “ T JT ´1 entonces la solución del problema de condiciones iniciales es
„
„
x1 ptq
Jt ´1 x0
“ Te T
.
x2 ptq
v0
Usando el mismo procedimiento que en el caso de dos valores propios reales y
distintos, existen vectores reales a y b de dos componentes tales que:
„
„
„
“
‰ 1 t “
‰ x0
x1 ptq
´ω0 t
p
p
t1 t2
“ e
t t
x2 ptq
0 1 1 2 v0
“ e´ω0 t pa ` btq
Los vectores a y b se pueden dar explı́citamente:
„
ˆ„ „
˙
x1 ptq
x0
pv0 ` ω0 x0 q
´ω0 t
“e
`
t
x2 ptq
v0
v0 ´ ω0 pv0 ` ω0 x0 q
La Figura 4.8 muestra las gráficas de un oscilador lineal crı́ticamente amortiguado en función del signo de la velocidad inicial del mismo.
Una caracterı́stica común a las tres gráficas es que las trayectorias, después de
un periodo transitorio en el que pueden crecer o decrecer, tienden a cero asintóticamente. Ello es debido a que los valores propios, λ1 y λ2 , de los osciladores lineales
con amortiguamiento siempre tienen la parte real negativa: ´ω0 ζ y, por lo tanto,
para t suficientemente grande la función exponencial e´ω0 ζt tienden a cero.
4.3.2.
Respuesta de un sistema lineal
Recordemos que la respuesta de los sistemas lineales
"
xptq
9
“ Aptqxptq ` Bptquptq,
tPT.
yptq “ Cptqxptq ` Dptquptq
viene dada por la fórmula (4.21) que reproducimos de nuevo aquı́:
żt
0
yptq “ CptqΦpt, t0 qx `
CptqΦpt, sqBpsqupsqds ` Dptquptq, t P T .
t0
(4.35)
(4.36)
80
El modelo de espacio-estado
Figura 4.9: Entrada para un sistema lineal.
Figura 4.10: Respuesta transitoria y de
espacio-estado a la entrada de la Figura
4.9.
Vemos en esta expresión que la solución consiste de una
ż t respuesta a la condición
inicial, CptqΦpt, t0 qx0 , y una respuesta a la entrada,
CptqΦpt, t0 qBpsqupsqds `
t0
0
Dptquptq. Utlizando la terminologı́a de la Sección 4.2, ηpt, x,
ż t0U q “ CptqΦpt, t0 qx es
la respuesta del sistema al movimiento libre, y ηpt, 0X , uq “
CptqΦpt, t0 qBupsqds`
Duptq es la respuesta del sistema al movimiento forzado.
t0
Resulta además que la respuesta a la entrada (movimiento forzado) se divide en
dos respuestas: una que se conoce con el nombre de respuesta transitoria y otra que
se llama respuesta de estado estacionario. La Figura 4.10 muestra la respuesta de
un sistema lineal a una entrada de tipo sinusoidal (Figura 4.9). En ella se aprecian
las dos partes de la respuesta a dicha entrada. En particular para entradas periódicas la respuesta de estado-estacionario suele ser también periódica y representa el
comportamiento del sistema a largo plazo.
Hay tres tipos de funciones de entrada que se usan habitualmente para el análisis
de la respuesta de los sistemas lineales: la función impulso, la función salto unidad
y las funciones seno o coseno. Analizaremos cada una de ellas por separado para
sistemas invariantes en el tiempo. Para la función impulso también daremos la expresión de la solución para sistemas lineales generales. Para las demás funciones,
expresiones explı́citaas son sólo posible para sistema invariantes en el tiempo.
Recordemos que para sistemas invariantes en el tiempo
"
9
xptq
“ Axptq ` Buptq,
yptq “ Cxptq ` Duptq
la matriz de transición de estados es Φpt, t0 q “ eApt´t0 q .
(4.37)
4.3 Sistemas Lineales
81
Respuesta a un impulso
Se llama respuesta a un impulso a la respuesta forzada de un sistema cuando la
entrada es la “función” impluso unidad en 0; es decir δa ptq con a “ 0:
"
0, t ‰ a
δa ptq :“
`8, t “ a.
Ya vimos en el Capı́tulo 3 (véase la Sección 3.4) que δ no es una función en sentido
clásico y en el Apéndice A se ponen las bases para un uso riguroso de δ. En particular
se da sentido a la expresión:
ż `8
ż `8
f puqδpt ´ uqdu “
f pt ´ uqδpuqdu “ f ptq, t P R.
(4.38)
´8
´8
Con esta propiedad en nuestras manos podemos decir cuál es la respuesta de un
sistema lineal invariante en el tiempo a un impulso. Suponemos m “ p “ 1 y que
el sistema está en reposo en el instante inicial t “ 0; i.e., x0 “ xp0q “ 0. Se suele
denotar por hptq a la función respuesta. Entonces
żt
hptq “ CeApt´sq Bδpsqds “ CeAt B;
(4.39)
0
donde hemos aplicado (4.38) a la función f pzq “ CeAz B y supuesto f pzq “ 0 para
z fuera del intervalo de integración r0, ts.
fPor lo tanto, la salida (4.36) del sistema lineal (4.37) cuando p “ m “ 1 puede
escribirse de la siguiente forma:
żt
Apt´t0 q 0
yptq “ Ce
x ` hpt ´ squpsqds ` Dupsq.
(4.40)
0
Una interpretación de esta expresión para yptq es que la respuesta del sistema lineal
(4.37) es la superposición de las respuestas a un “conjunto infinito de impulsos
desplazados, cada uno de los cuales tiene magnitud uptq”.
Cuando el sistema es multivariable; es decir, con más de una entrada o salida:
m ą 1 o p ą 1, en lugar de la función respuesta a un impulso, hptq, tendrı́amos la
matriz de respuesta a un impulso. En este caso, habrı́a m funciones de entrada:
ui ptq “ ei δptq,
donde ei es la i-ésima columna de la matriz Im ; es decir, el vector de tamaño m con
todas sus componentes 0 excepto la i-ésima que es 1, y p salidas. En consecuencia,
Hptq “ CeAt B
(4.41)
82
El modelo de espacio-estado
serı́a una matriz de tamaño pˆm cuyo elemento hij ptq es la respuesta yi ptq al impulso
uj ptq cuando el sistema se encuentra en reposo en el instante inicial. En conjunto,
el vector de salidas para un sistema multivariable cuyos vectores de entradas fueran
ui ptq “ ei δptq es:
żt
Apt´t0 q 0
Hpt ´ squpsqds ` Duptq.
(4.42)
yptq “ Ce
x `
t0
Y para sistemas lineales generales:
0
yptq “ CptqΦpt, t0 qx `
siendo
żt
Hpt, squpsqds,
"
CptqΦpt, sqBpsq ` Dptqδpt ´ sq @t ě s
0
@t ă s
żt
Dpsqupsqδpt ´ sqds “ Dptquptq.
Hpt, sq “
(4.43)
0
A la matriz Hpt, sq (o Hptq en el caso de sistemas invariantes en el tiempo) se le
llama matriz de respuesta a un impulso. Nótese que , en efecto, la respuesta a un
impulso de un sistema lineal general con p “ m “ 1 serı́a para t ą s:
żt
hpt, sq “ CptqΦpt, τ qBpτ qδps ´ τ qdτ “ CptqΦpt, sqBpsq,
0
y también:
0
Por lo tanto
żt
żt
0
CptqΦpt, t0 qx ` Hpt, squpsqds “ CptqΦpt, t0 qx ` CptqΦpt, sqBpsqupsqds`Dptquptq “ yptq.
0
0
0
El Control System Toolbox de MATLAB dispone de las funciones impulse y
impulseplot para calcular y dibujar las gráficas de la respuesta de un sistema
lineal a la función impulso. Por ejemplo, para dibujar la gráfica del desplazamiento
y velocidad de un oscilador lineal, inicialmente en reposo, cuando es sometido a
un impulso podrı́amos proceder de la siguiente forma (suponiendo que el oscilador
lineal tiene una frecuencia natural ω0 “ 0,5 una razón de amortiguamiento ζ “ 0,25
y k “ 1{ωo2 ):
1. Definimos el sistema con el comando ss (veremos cuando estudiemos la respuesta a la función salto que hay otras formas de definir un sistema). Para
ello construı́mos las matrices A, B y C. En este caso D “ 0 y C “ I2 porque
queremos tener información de xptq “ x1 ptq y xptq
9
“ x2 ptq. Es decir, queremos
que la salida sea el estado completo.
4.3 Sistemas Lineales
83
Figura 4.11: Gráficas de los estados del sistema en forma de espacio-estado para el
oscilador lineal con parámetros ω0 “ 0,5, ζ “ 0,25 y k “ 1{ω02 .
>> w=0.5; z=0.25;
>> A=[0 1; -w^2 -2*z*w]; B=[0;1]; C=eye(2);
>> sis=ss(A,B,C,0)
sis =
a =
x1
x2
x1
0
1
x2 -0.25 -0.25
b =
x1
x2
u1
0
1
c =
y1
y2
x1
1
0
x2
0
1
d =
u1
y1
0
y2
0
Continuous-time state-space model.
2. Usamos impulse o impulseplot (véase la ayuda de MATLAB para conocer
84
El modelo de espacio-estado
el alcance de estas dos funciones) para dibujar las gráfica de x1 ptq y x2 ptq:
>> impulse(sis)
En la Figura 4.11 se muestran las gráficas de las dos variables. Out(1) se
corresponde con el desplazamiento (xptq “ x1 ptq) y Out(2) con la velocidad
9
(xptq
“ x2 ptq).
Respuesta a un salto
Recordemos que la función salto unidad (o función de Heavisade) es:
"
0, t ă 0
γptq :“
1, t ě 0.
Obsérvese que cualquier función continua puede aproximarse por una sucesión de
funciones que son múltiplo de funciones de salto unidad.
La respuesta a un salto del sistema (4.37) con m “ p “ 1 se define como la salida
yptq del sistema cuando el estado inicial está en reposo (xp0q “ 0) y la entrada es
γptq para t ě 0. Cuando el sistema es lineal, invariante en el tiempo y la matriz de
estados A es invertible, la respuesta a un salto se obtiene a partir de (4.36):
żt
żt
Ce
Bupτ qdτ ` Duptq “ C eApt´τ q Bdτ ` D “
0ż
0
t
ˇ
σ“t
“ C eAσ Bdσ ` D “ CpA´1 eAσ Bqˇσ“0 ` D “
yptq “
Apt´τ q
0
“ CA´1 eAt B ´ CA´1 B ` D.
Podemos reescribir la solución de la siguiente forma:
yptq “ looooomooooon
CA´1 eAt B ` D
´ CA´1 B ,
loooooomoooooon
transitoria
estado-estacionario
t ą 0.
(4.44)
El primer término es la respuesta transitoria y converge a cero cuando t Ñ 8 cuando
las partes reales de los valores propios de A son negativas. El segundo término es
la respuesta de estado-estacionario y representa el valor de la salida del sistema a
largo plazo. Nótese que
d
yptq “ CeAt B,
dt
que comparando con (4.39) nos permite decir que la respuesta a un impulso es la
derivada de la respuesta a un salto unidad. De hecho, tal y como se demuestra eb el
4.3 Sistemas Lineales
85
Figura 4.12: Ejemplo de respuesta a un salto. El tiempo de subida, exceso, tiempo
de ajuste, y el valor de la respuesta de estado-estacionario son los valores que definen
el comportamiento de la señal del sistema.
Apéndice A, la función impulso es la la derivada, en el sentido de las distribuciones,
de la función de Heavisade.
En la Figura 4.12 se muestra un ejemplo de respuesta a un salto para un sistema
lineal. Se suele usar cierta terminologı́a para referirse a los parámetros fundamentales
que definen el comportamiento de la señal de salida:
El valor de estado estacionario yee es el valor final de la salida (suponiendo
que converja).
Tiempo de Subida Tr es la cantidad de tiempo que se requiere para que la
señal pase del 10 % al 90 % de su valor final.
Sobreelongación (Overshoot) Mp es el porcentaje del valor final que la señal
sube por encima de éste en la etapa transitoria (en el supuesto de que la señal
no sube en tiempos posteriores por encima del valor en la etapa transitoria).
Tiempo de Ajuste Ts es la cantidad de tiempo necesaria para que la señal se
sitúe en el 2 % de su valor final.
Al igual que en el caso de la respuesta a un impulso, si el sistema es multivariable
(m ą 1 o p ą 1) en vez de función de respuesta a un salto habları́amos de matriz de
respuesta a un salto. La expresión de esta matriz serı́a la misma que en (4.44).
Hay varias funciones en el Control System Toolbox de MATLAB diseñadas para
analizar la respuesta de un sistema a un salto. Explicaremos el uso de algunas de
ellas tomando como referencia el oscilador lineal con amortiguamiento. Recordemos
que la ecuación que rige la dinámica de los osciladores lineales viene dada por (4.31)
que, en el modelo de espacio-estado, es equivalente a (4.32). Para hacer cálculos
supondremos que la razón de amortiguamiento del sistema es ζ “ 0,25 y la frecuencia
86
El modelo de espacio-estado
natural es ω0 “ 0,6 rad/seg. Con estos datos concretos el sistema (4.31) queda:
:ptq ` 0,30xptq
9 ` 0,36xptq “ 0,36kuptq
x
(4.45)
cuya función de trasferencia (suponiendo yptq “ xptq) es
gpsq “
s2
0,36k
.
` 0,30s ` 0,36
(4.46)
Por su parte, las ecuaciones del sistema en la forma de espacio-estado quedarı́an:
$
„
„
0
1
0
&
9
xptq
“
`
uptq
´0,36
´0,30
0,36k
(4.47)
“
‰
%
yptq “ 1 0 xptq,
„
x1 ptq
siendo, ahora, xptq “
. Ya hemos visto que los sistemas (4.45) y (4.47) son
x2 ptq
9
donde, ahora,
equivalentes a través del cambio de variable x1 ptq “ xptq, x2“ptq “‰ xptq
xptq es la variable del sistema (4.45). La ecuación yptq “ 1 0 xptq de (4.47) nos
indica que la salida del sistema es la solución del sistema (4.45). En consecuencia, la
relación entre las transformadas de Laplace (con condición inicial cero) de la salida
y la entrada del sistema (4.47) debe ser la función de transferencia gpsq en (4.46).
En efecto, denotando con A, B y C a las matrices de estados, entradas y salidas,
respectivamente, del sistema (4.47):
„
„
“
‰
0
1
0
A“
, B“
, C“ 1 0 ,
´0,36 ´0,30
0,36k
y usando las propiedades de la transformada de Laplace obtenemos
ypsq “ CpsI2 ´ Aq´1 Bupsq.
A la matriz CpsIn ´ Aq´1 B ` D, que es una matriz de tamaño p ˆ m de funciones
racionales, se le llama Matriz de Transferencia del sistema. En este ejemplo m “
p “ 1 de modo que la matriz de transferencia se reduce a una sola función que
podemos calcular a mano:
CpsI2 ´ Aq´1 B “
s2
0,36k
“ gpsq.
` 0,30s ` 0,36
Para sistemas más complicados o de mayores dimensiones podemos hacer uso de
los comandos ss (state-space) y tf (transfer function) del Control System Toolbox
de MATLAB. En nuestro ejemplo, podrı́amos proceder como sigue (se ha tomado
k “ 1):
4.3 Sistemas Lineales
87
>> A=[0 1;-0.36 -0.30]; B=[0;0.36];C=[1 0];
>> sis=ss(A,B,C,0);
>> g=tf(sis)
g =
0.36
-----------------s^2 + 0.3 s + 0.36
Continuous-time transfer function.
Dada una función (o matriz, en el caso multivariable) de transferencia se puede
obtener un sistema en forma de espacio-estado cuya matriz de transferencia sea la
dada. Los comandos a utilizar son los mismos en orden inverso:
>> num=[0.36]; den=[1 0.3 0.36];
>> sis=tf(num,den)
sis =
0.36
-----------------s^2 + 0.3 s + 0.36
Continuous-time transfer function.
>> sises=ss(sis)
sises =
a =
x1
x2
x1
-0.3 -0.72
x2
0.5
0
b =
x1
x2
u1
1
0
c =
y1
x1
0
x2
0.72
d =
u1
y1
0
Continuous-time state-space model.
Las matrices de estados, entradas y salidas producidas se pueden extraer usando los
88
El modelo de espacio-estado
siguientes comandos:
>> A1=sises.a
A1 =
-0.3000
-0.7200
0.5000
0
>> B1=sises.b
B1 =
1
0
>> C1=sises.c
C1 =
0
0.7200
Observamos que estas matrices
„
´0,3 ´0,72
A1 “
,
0,5
0
„
1
B1 “
,
0
“
‰
C1 “ 0 0,72 ,
(4.48)
son diferentes de las del sistema (4.45). Es fácil comprobar, sin embargo que los
sistema pA, B, Cq y pA1 , B1 , C1 q son semejantes en el sentido de que existe una
matriz T no singular tal que
A1 “ T ´1 AT, B1 “ T ´1 B, C1 “ CT.
„
0 0,72
En este ejemplo la matriz T “
sirve para realizar el cambio. Debe
0,36 0
observarse no obstante que, aunque en este caso concreto los dos sistemas son semejantes, es posible, para sistemas más complejos en general, que el sistema que
devuelva MATLAB no sea semejante a uno que se haya podido obtener por medio
de otros procedimientos. Una vez definidos los sistemas, bien a través de la función
o matriz de transferencia o con las matrices del modelo de espacio-estado, los comandos step, stepplot y stepinfo pueden usarse para analizar la respuesta del
sistema cuando la entrada es la función salto unidad. Para dibujar la gráfica de
dicha respuesta se puede utilizar tanto step como stepplot. La primera, además,
produce (si se le pide) los valores de la respuesta en ciertos instantes de tiempo, los
instantes de tiempo en los que se calcula la salida y, cuando el sistema está dado
en forma de espacio estado, los valores del vector de estados en esos instantes de
tiempo. El comando stepplot se usa, sobre todo, para poder manipular (editar) la
gráfica una vez producida. Los comandos
>> step(g)
>> step(sis)
>> step(sises)
4.3 Sistemas Lineales
89
Figura 4.13: Gráfica producida por los comamdos step y stepplot para el sistema
(4.47) y sus equivalentes (4.46) y (4.48).
Figura 4.14: Trayectorias de los estados
del sistema (4.47).
Figura 4.15: Trayectorias de los estados
del sistema definido por las matrices en
(4.48).
producen los tres la misma gráfica; la que aparece en la Figura 4.13. Esta misma
gráfica se obtiene sustituyendo step por stepplot en los tres comandos.
Si lo que se desea es una gráfica de la evolución de los estados del sistema, se
podrı́a proceder de la siguiente forma:
>> [y t x]=step(sis);
>> plot(t,x(:,1), ’b-’,t,x(:,2), ’r--’)
>> legend(’desplazamiento’, ’velocidad’)
La gráfica obtenida se presenta en la Figura 4.14 mientras que la gráfica que producirı́an estos comandos para los estados del sistems sises (que es el devuelto por
el comando ss a partir de la función de transferencia gpsq en (4.45)) se presenta en
la Figura 4.15. Nótese que aún cuando la respuesta, yptq, de los dos sistemas es la
misma (Figura 4.13), no lo son sus estados.
Finalmente, el comando stepinfo se usa para obtener información de los parámetros de la respuesta del sistema a la función salto. Debe recordarse que el valor de
estado estacionario (yee ) es, de acuerdo con (4.44), D ´ CA´1 B. El valor de los
90
El modelo de espacio-estado
demás parámetros los proporciona stepinfo. Ası́ para el oscilador lineal que venimos considerando cualquiera de los tres comandos
>> S=stepinfo(sis)
>> S=stepinfo(g)
>> S=stepinfo(sises)
produce la misma salida (ver Figura 4.13):
S =
RiseTime:
SettlingTime:
SettlingMin:
SettlingMax:
Overshoot:
Undershoot:
Peak:
PeakTime:
2.1145
23.5265
0.8027
1.4432
44.3235
0
1.4432
5.5262
donde RiseTime es el tiempo de subida, Tr , SettlingTime es el tiempo de ajuste,
Ts , Overshoot es la sobreelongación por encima de yee , Mp , Undershot es el defecto
por debajo de yee (que se define como el overshoot pero por defecto), SettlingMin y
SettlingMax son los valores mı́nimo y máximo de y después del tiempo de subida,
Peak es el valor máximo de y, y Peaktime es el instante en el que se alcanza el
máximo valor de y.
En general, para un sistema de segundo orden como el oscilador lineal, la forma
de la curva que representa la respuesta del sistema a la función salto depende de
la razón de amortiguamiento ζ mientras que la velocidad depende de la frecuencia
natural del sistema ω0 . En la Figura 4.16 se muestran las respuestas del sistema
(4.31) a la función salto unidad (puptq “ γptq) para k “ 1, ζ “ 0,25 y varios valores
de ω0 . Y en la Figura 4.17 se muestran las respuestas del mismo sistema para k “ 1,
ω0 “ 0,5 y varios valores de ζ.
Para el oscilador lineal
$
„
„
0
1
0
&
xptq
9
“
`
uptq
´ω02‰ ´2ζω0
kω02
“
%
yptq “ 1 0 xptq,
(4.49)
se puede dar una expresión explı́cita de la respuesta a la función salto unidad uptq “
γptq. Para ello, partimos mejor de la ecuación cuadrática original
:ptq ` 2ζω0 xptq
9 ` ω02 xptq “ kω0 ,
x
(4.50)
4.3 Sistemas Lineales
91
Figura 4.16: Respuesta del sistema
(4.31) a la función salto unidad para
k “ 1, ζ “ 0,25 y ω0 “ 0,25, 0,5, 0,75.
Figura 4.17: Respuesta del sistema
(4.31) a la función salto unidad para
k “ 1, ω0 “ 0,5 y ζ “ 0, 0,2, 0,5, 1,05.
y observamos que xp ptq “ k es una solución particular de la ecuación. Entonces, la
solución general de la ecuación es xptq “ xh ptq`xp ptq siendo xh ptq la solución general
de la ecuación (4.50) cuando la fuerza externa es 0; es decir, de la correspondiente
ecuación homogénea. Recordemos que la expresión de xh ptq es diferente según que
ζ ą 1, 0 ă ζ ă 1 o ζ “ 1 (véase Ejemplo 4.5). En cualquier caso, lo que nos interesa
es la respuesta del sistema (en este caso yptq “ xptq) cuando el sistema se encuentra
9
“ 0. Un simple
en reposo en el instante inicial t “ 0; es decir, cuando xp0q “ 0, xp0q
cálculo muestra que cuando se impone esta condición inicial a xptq “ xh ptq ` k para
cada expresión de xh ptq en función de ζ, se obtiene la siguiente expresión explı́cita
de la respuesta del sistema:
¸¸
ζ
sen ωd t
,
yptq “ k 1 ´ e´ζω0 t cos ωd t ` a
1 ´ ζ2
´ω0 t
yptq “ kp1
˜ ´ e ˜p1 ` ω0 tqq, ζ¸“ 1;
?
1
ζ
2
a
yptq “ k 1 ´
` 1 e´ω0 tpζ´ ζ ´1q `
2
ζ2 ´ ¸
1
˜
¸
?
ζ
1
2
a
`
´ 1 e´ω0 tpζ` ζ ´1q , ζ ą 1
2
ζ2 ´ 1
˜
˜
donde, recordemos, ωd “ ω0
a
0 ă ζ ă 1;
1 ´ ζ 2 es la frecuencia de amortiguamiento.
(4.51)
Usando estas fórmulas se pueden calcular los parámetros (tiempo de subida,
exceso, tiempo de ajuste,. . . ) asociados a las respuestas a saltos unidad. Por ejemplo,
para sistemas subamortiguados (0 ă ζ ă 1) haciendo la sustitución ϕ “ arc cos ζ, la
92
El modelo de espacio-estado
correspondiente expresión en (4.51) queda:
ˆ
˙
e´ζω0 t
yptq “ k 1 ´
pcospωd tq sen ϕ ` cos ϕ senpωd tqq
sen ϕ
˜
¸
1
“ k 1´ a
e´ζω0 t senpωd t ` ϕq .
1 ´ ζ2
(4.52)
Ası́, el estado estacionario es
yee “ k,
(4.53)
y la sobreelongación se alcanza en el primer instante en que la derivada de y en (4.52)
π
. Se puede comprobar que las expresiones explı́citas para
se hace 0 que es en t “
2ωd
la sobreelongación, el tiempo de subida y el tiempo de ajuste son, respectivamente:
Mp “ e
? πζ
1´ζ 2
,
Tr «
1 tanϕ ϕ
e
,
ω0
Ts «
4
,
ζω0
(4.54)
Respuesta a una excitación sinusoidal
Otra señal de entrada comúnmente usada para el análisis y diseño de sistemas
lineales es un sinusoide (o una combinación de sinusoides). A la respuesta de los
sistemas lineales a este tipo de entradas se le conoce con el nombre de respuesta de
frecuencia y mide la forma en la que el sistema responde a una excitación sinusoidal
en una de sus entradas. Para ver la forma en que se hace esto, evaluaremos la salida
(4.36) para uptq “ cos ωt, suponiendo m “ p “ 1. Aquı́ ω es la frecuencia de la
señal de entrada. Realizar los cálculos que se necesitan al implantar directamente
uptq “ cos ωt en (4.36) resulta bastante engorroso. Para aliviarlos haremos uso del
principio de superposición (ver (4.9)-(4.10)) de los sistemas lineales aplicándolo a la
salida. Para ello, notemos que
cos ωt “
˘
1 ` iωt
e ` e´iωt ,
2
de modo que calcularemos la respuesta del sistema lineal a una entrada de la forma
uptq “ est (con s un número complejo arbitrario) y, luego, escogeremos s “ iωt y
s “ ´iωt y calcularemos la media de las salidas correspondientes a estos dos valores
de s. Esto nos proporcionará la respuesta a la entrada uptq “ cos ωt. Usando (4.36)
obtenemos (suponiendo la condición inicial xp0q “ x0 )
żt
At 0
yptq “ Ce x ` CeApt´τ q Best dτ ` Dest “
0
żt
At 0
At
“ Ce x ` Ce
epsI´Aqτ Bdτ ` Dest .
0
4.3 Sistemas Lineales
93
En el supuesto de que s “ ˘iω no sean valores propios de A, tendrı́amos que sI ´ A
es invertible y podrı́amos escribir
`
˘ˇt
psI´Aqs
ˇ ` Dest “
yptq “ CeAt x0 ` CeAt psI ´ Aq´1
e
B
0
`
˘
“ CeAt x0 ` CeAt psI ´ Aq´1 `epsI´Aqt ´ I˘ B ` Dest “
“ CeAt x0 ` CeAt psI ´ Aq´1 est e´At ´ I B ` Dest “
“ CeAt x0 ´ CeAt psI ´ Aq´1 B ` CpsI ´ Aq´1 est B ` Dest .
En consecuencia,
˘ st
` 0
˘ `
´1
At
´1
`
CpsI
´
Aq
B
`
D
e .
yptq “ Ce
x
´
psI
´
Aq
B
looooooooooooooomooooooooooooooon looooooooooooooomooooooooooooooon
respuesta transitoria
(4.55)
respuesta de estado estacionario
Vemos que, de nuevo, la solución se compone de una respuesta transitoria y una de
estado estacionario. La respuesta transitoria decae asintóticamente a cero si todos
los valores propios de la matriz de estados, A, tienen parte real negativa, mientras
que la de estado-estacionario es proporcional a la entrada (compleja) uptq “ est .
Debe observarse que en el caso que estamos estudiando (sistemas con una entrada
y una salida) la presencia del número complejo s en CpsI ´ Aq´1 B ` D hace que
este número sea, en general, complejo incluso cuando las matrices A, B, C y D
sean todas reales. Si llamamos M al módulo de este número y θ a su argumento,
respectivamente, en la terminologı́a habitual) tenemos que
M eiθ “ CpsI ´ Aq´1 B ` D,
(4.56)
que es, cuando s se mira como una variable compleja, la función de transferencia
del sistema. Por lo tanto el valor de yee , la respuesta en estado estacionario (cuando
hay convergencia para t suficientemente grande) será:
yee ptq “ M eiθ est “ M est`iθ .
Cuando s “ iω, se dice que M es la ganancia y que θ es la fase del sistema a
una frecuencia forzada dada ω. Es decir, ganancia(ω)=M y fase(ω)=θ. Esto tiene
la siguiente interpretación: supongamos que la entrada es una onda sinusoidal de
amplitud Au , frecuencia ω y desfase ψ: uptq “ Au senpωt ` ψq. Podemos escribir
uptq “ Au psen
˙
ˆ ωt cos ψ ` cos ωt sen ψq “
˘
˘
1 ` iωt
1 ` iωt
´iωt
´iωt
e ´e
cos ψ `
e `e
sen ψ .
“ Au
2i
2
Usando el principio de superposición la salida en estado estacionario será:
ˆ
˙
˘
˘
1 `
1`
ipωt`θq
´ipωt`θq
ipωt`θq
´ipωt`θq
yee ptq “ Au
Me
´ Me
cos ψ `
Me
` Me
sen ψ “
2i
2
“ M Au psenpωt ` θq cos ψ ` cospωt ` θq sen ψq “
“ M Au senppωt ` pθ ` ψqq.
94
El modelo de espacio-estado
Figura 4.18: Respuesta de un sistema
lineal a un sinusoidal. La entrada en
lı́nea discontinua y la respuesta en continua va adelantada ∆T segundos.
Figura 4.19: Respuesta de frecuencia en
la que se muestra la ganancia y fase del
sistema en función de frecuencia de entrada.
Esto significa que yee es una función de la misma naturaleza que la entrada: una
función sinusoidal con la misma frecuencia ω pero desplazada hacia la derecha o
izquierda según que θ sea positivo o negativo, respectivamente. Y la amplitud de la
salida es M veces la de la entrada. Es decir, si yee ptq “ Ay senpωt ` ϕq entonces
gananciapωq “ M “
Ay
,
Au
fasepωq “ ϕ ´ ψ “ θ.
Cuando el sistema es multivariable (m ą 1 o p ą 1) para cada elemento de
la matriz de trasferencia tendrı́amos una ganancia y una fase. Si Gpsq “ CpsIn ´
Aq´1 B ` D entonces pondrı́amos
Mkj eiθkj “ gkj piωj q,
1 ď k ď p, 1 ď j ď m.
Mkj y θkj son la ganancia y fase de la respuesta yk ptq a la excitación sinusoidal
uj ptq “ eiωj ej
donde ej es a j-ésima columna de Im . En la Figura 4.18 se muestra la respuesta
de frecuencia de un sistema lineal. La lı́nea discontinua muestra la gráfica de la
entrada que tiene amplitud 2 y la continua la respuesta a dicha entrada que tiene
mayor amplitud porque, en este ejemplo, la ganancia es aproximadamente M “ 1,54.
Además la fase es positiva por lo que la salida va “adelantada” respecto a la entrada.
Para analizar las respuestas de frecuencia de los sistemas lineales se suelen usar
las gráficas de Bode (Bode plot). En ellas se representa la ganancia y la fase del
sistema en función de la frecuencia de la entrada. Este tipo de gráficas se pueden
obtener con la función bode o bodeplot del Control Toolbox de MATLAB, por
ejemplo. La Figura 4.19 muestra un ejemplo de este tipo de representación.
Como en el caso de respuesta a la función salto, hay algunas propiedades estándar
que se usan para caracterizar la respuesta de frecuencia:
4.3 Sistemas Lineales
95
La ganancia de frecuencia cero M0 es la ganancia del sistema para ω “ 0.
Corresponde a la razón entre una entrada constante y la salida en estado
estacionario. Su valor se obtiene al sustituir s “ 0 en (4.56)
M0 “ ´CA´1 B ` D;
i.e., es la respuesta de estado estacionario a la función salto unidad. Es importante notar que la ganancia de frecuencia cero sólo está definida cuando A es
invertible; es decir, si no tiene 0 como valor propio.
El ancho de banda ω?b es el rango de frecuencia en el que la ganancia ha decrecido no más que 1{ 2 de su valor de referencia. Para sistemas con ganancia
de frecuencia cero finita y no nula, este valor de referencia es dicha ganancia.
El valor de referencia puede ser distinto dependiendo de cada tipo de sistema.
El pico resonante Mr y la frecuencia del pico. El primero es el valor máximo
de la ganancia del sistema y el segundo es el valor de la frecuencia de entrada
donde se alcanza el primero.
La resonancia es un fenómeno que se produce en los sistemas cuadráticos
(como los osciladores lineales) que por su propia naturaleza producen una
respuesta (salida) sinusoidal. Para estos sistemas hay valores de frecuencias
que hacen que la ganancia de la respuesta a dicha frecuencia se amplifique
enormemente. A este fenómeno se le llama resonancia. De ahı́ que al valor
máximo de la ganancia de un sistema a una frecuencia dada se le llame pico
resonante.
Comandos del Control Toolbox de MATLAB que proporcionan valores significativos de la respuesta de frecuencia son:
freqresp devuelve un vector (o matriz si el sistema es multivariable) con la respuesta (número complejo) de frecuencia de un sistema para ciertas frecuencias
determinadas por el propio algoritmo que implementa el comando. Para saber
las frecuencias usadas y sus respuestas, se puede usar [h,w]=freqresp(sis),
donde sis es el sistema definido en foma de espacio-estado o como matriz de
transferencia. El comando h=freqresp(sis,w) devuelve la respuesta de frecuencia del sistema sis a la frecuencia w. En todos los casos las respuestas de
frecuencia son números complejos; su módulos son las ganancias en unidades
absolutas y los ángulos las fases en radianes. Para pasar de unidades absolutas
a decibelios,dB, hay que multiplicar por 20 log10 . El comando mag2db hace esta
operación.
El valor de M0 se puede obtener de la siguiente forma: M0=freqresp(sis,0),
aunque el comando dcgain es más apropiado.
96
El modelo de espacio-estado
getPeakGain devuelve Mr y la frecuencia ωr donde se alcanza el pico. Las
unidades para Mr que devuelve getPeakGain son unidades absolutas.
bandwidth(sis,vdB) devuelve la primera frecuencia en la que la ganancia de
la respuesta del sistema cae por debajo del 70,79 % de M0 , o del valor vdB
especificado en decibelios.
getGainCrossover(sis,vub) devuelve un vector de dos frecuencias; son los
extremos del intervalo de frecuencias entre los que la ganancia del sistema
está por encima o por debajo del valor especificado, vub, en unidades absolutas.
Por ejemplo, si para un sistema H, wc = getGainCrossover(H,1) devuelve
>>wc =
1.2582
12.1843
esto quiere decir que entre (aproximadamente) 1,3 rad/seg y 12,2 rad/seg, el
sistema excede la ganancia 0 dB.
Para el oscilador lineal, podemos dar explı́citamente una expresión para M eiθ .
En efecto, M eiθ “ Cpiω ´ Aq´1 B ` D. Ahora bien,
gpsq “ CpsI ´ Aq´1 B ` D
es la función de trasferencia del sistema, que en el caso del oscilador lineal es:
gpsq “
kω02
.
s2 ` 2ζω0 s ` ω02
En consecuencia,
M eiθ “
kω02
kω02
“
.
piωq2 ` 2ζω0 piωq ` ω02
ω02 ´ ω 2 ` 2iζω0 ω
Por lo tanto
y
kω02
M“a 2
“ dˆ
´
pω0 ´ ω 2 q2 ` 4ζ 2 ω02 ω 2
1´
ω
ω0
k
¯2 ˙2
ω02 ´ ω 2
θ “ arc cos a 2
.
pω0 ´ ω 2 q2 ` 4ζ 2 ω02 ω 2
` 4ζ 2
´ ¯2
ω
ω0
Se comprueba ası́ que la ganancia es muy grande si la frecuencia de entrada, ω,
es muy parecida a la frecuencia natural del sistema, ω0 , y el coeficiente de amortiguamiento, ζ, es muy pequeño. Es para estos valores cuando hay peligro de que se
4.3 Sistemas Lineales
97
Figura 4.20: Respuesta de frecuencia para un sistema de segundo orden en función
de ζ. La gráfica superior representa la ganancia y la inferior la fase.
produzca el fenómeno de la resonancia (que “el sistema entre en resonancia’ ’, se
suele decir). Además, la fase es casi cero para valores de la frecuencia forzada, ω,
próximos a la frecuencia natural del sistema ω0 .
En la Figura 4.20 se muestran las gráficas de la ganancia y fase de un oscilador
lineal para varios valores ζ. Valores pequeños de ζ producen picos resonantes más
agudos y un cambio rápido en la fase cuando ω « ω0 . A medida que ζ aumenta la
magnitud del pico decrece y los cambios de fase se hacen más suaves. Nótese que
cuando ζ es pequeño, θ es casi 0 si ω0 ą ω y casi π radianes si ω0 ă ω.
Los siguientes comandos de MATLAB proporcionan el pico resonante y la frecuencia del pico para el oscilador lineal con valores ω0 “ 0,6 y ζ “ 0,05:
>>
>>
>>
ft
w=0.6; z=0.05;
num=w^2; den=[1 2*z*w w^2];
ft=tf(num,den)
=
0.36
------------------s^2 + 0.06 s + 0.36
Continuous-time transfer function.
>> [gp,fp] = getPeakGain(ft)
gp =
10
fp =
0.6000
>> gp_dB = mag2db(gp)
98
El modelo de espacio-estado
gp_dB =
20
El pico resonante se alcanza cuando la frecuencia de entrada coincide, aproximadamente, con la frecuencia natural del sistema ω0 “ 0,6 (medidas absolutas).