Document
Anuncio

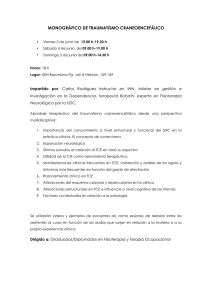
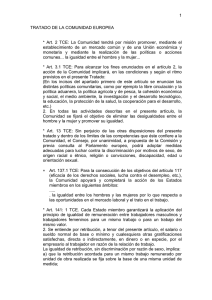
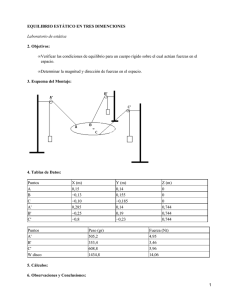
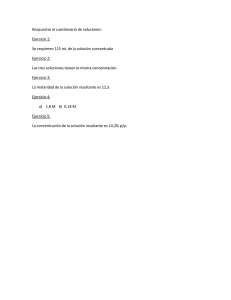
Capítulo III EQUILIBRIO DE UN CUERPO RÍGIDO 3.1 CONCEPTOS PREVIOS 1. Momento de una fuerza respecto a un punto ( M OF ).Cantidad vectorial que mide la rotación (giro) o tendencia a la rotación producida por una fuerza que actúa sobre un cuerpo, respecto a un punto de dicho cuerpo. La figura siguiente muestra un cuerpo rígido sometido a una fuerza externa F . Esta fuerza produce un giro en sentido contrario a las manecillas de un reloj, respecto al punto “O” de dicho cuerpo. La dirección del vector momento M OF se determina aplicando la regla de la mano derecha o regla del sacacorchos. Vector M OF : Eje de momento z F O F M Línea de acción de la fuerza j ry Fy k rz Fz Dirección de M OF : Perpendicular al r O i F M O = r F = rx Fx d y plano que contiene a r y F . Se determina por la regla de la mano derecha. Magnitud de M OF : x M F O = M OF r F = r F sen En la figura: M OF : momento de la fuerza F con respecto al punto “O” 16 : vector posición que va desde el punto “O” hasta un punto conocido de la línea de acción r de la fuerza. O : punto de giro o centro de giro o centro de rotación o centro de momentos d : distancia perpendicular desde el punto “O” hasta la línea de acción de la fuerza. También se denomina brazo de palanca. 2. Momento resultante de un sistema de fuerzas ( M R ) .Se calcula mediante la suma vectorial de todos los momentos producidos por las fuerzas con respecto a un punto de un cuerpo rígido. n n M R M OF ri Fi i 1 i 1 Es decir: M R (O ) r1 F1 r2 F2 . . . rn Fn 3. Principio de los momentos (Teorema de Varignón).Establece que: “El momento de una fuerza con respecto a un punto es igual a la suma de los momentos de las componentes de la fuerza con respecto al mismo punto” Ejemplo: F y F Fzas componentes de F M o M o F2 Es decir: F1 M OF r F r F1 r F2 r * Se cumple: F F1 F2 O x 17 4. Momento de una fuerza con respecto a un eje específico.Es la proyección del vector momento de una fuerza con respecto a un punto, sobre un eje específico o línea de referencia. F M BB ` = momento de la fuerza F respecto al eje Eje de momento específico BB´. z B F O F BB ' M M r = vector de posición que va desde un punto conocido del eje específico a un punto conocido de la línea de acción de la fuerza. Eje específico F F Vector M BB ` (Proyección del vector M O sobre el eje BB´): F O F y M BB ` r BB´ r F BB´ * Recordar: x x BB´ r F rx Fx B´ y ry Fy z rz Fz Nota: Una fuerza no proporcionará un momento con respecto a un eje específico si la línea de acción es paralela al eje o su línea de acción pasa a través del eje. 5. Momento de un par ( M ).Un par se define como dos fuerzas paralelas que tienen la misma magnitud y direcciones opuestas, que están separadas por una distancia perpendicular “d”. El único efecto que el par produce es un giro o una tendencia a la rotación (perpendicular al plano donde está el par). M Vector M : M r F r = vector de posición que va desde un punto cualesquiera de la línea de acción de F , hasta un punto cualesquiera d F r F de la línea de acción de F Magnitud de M : M F d ; d = distancia perpendicular entre las fuerzas. Dirección de M : está dado por la regla de la mano derecha o regla del sacacorchos. 18 Nota: a) El vector momento de un par es un vector libre, es decir que lo podemos trasladar de un punto a otro en un mismo cuerpo, siempre y cuando se mantenga su magnitud y dirección correspondientes. M M F F F F F F M b) Se dice que dos pares son equivalentes si producen el mismo momento. Es necesario por lo tanto que los pares de fuerzas iguales estén en el mismo plano o en planos que sean paralelos entre sí. 6. Resultante del momento del par.Si más de dos momentos de un par actúan sobre un cuerpo, la resultante del momento del par está dada por la siguiente expresión: MR (r F) MR M O también: Ejemplo: M1 M2 M1 MR M2 19 7. Movimiento de una fuerza sobre un cuerpo rígido 1er Caso: El punto O está sobre la línea de acción de la fuerza. F F A A = O = O F A F F O Conclusión: los efectos externos sobre un cuerpo rígido permanecen inalterados cuando una fuerza, que actúa en un punto determinado del cuerpo, se aplica en otro punto que está sobre la línea de acción de la fuerza (Principio de transmisibilidad). 2do Caso: El punto O no está sobre la línea de acción de la fuerza. F F M r F A F = A O .O r = .P A F .O F Conclusión: al trasladar una fuerza de un punto a otro fuera de su línea de acción, el cuerpo permanece inalterado siempre y cuando, además de la fuerza, actúe un momento. 8. Resultante de un sistema de pares y fuerzas.Cuando un cuerpo rígido se encuentra sujeto a un sistema de fuerzas y momento de pares, con frecuencia resulta más sencillo estudiar los efectos externos sobre el cuerpo utilizando las resultantes de momentos de pares y fuerzas que el sistema de momentos de pares y de fuerza. 20 F1 O F1 M r1 MR FR F1 F2 F2 F2 M M 2 r2 F2 = r2 O = O M1 r1 F1 9. Fuerzas distribuidas – Reducción de una carga simple distribuida.Toda fuerza real aplicada a un cuerpo se distribuye sobre un área o volumen finitos, ese es el caso de las fuerzas ejercidas por el viento, fluidos, o simplemente el peso del material soportado por la superficie de dicho cuerpo. La intensidad de estas fuerzas (cargas) en cada punto de la superficie se define como la presión (fuerza por unidad de área), que puede medirse en N/m2 (Pascal) o bf /pie2. En aplicaciones de ingeniería es necesario conocer la forma en que se distribuyen las cargas o fuerzas en los cuerpos, por ejemplo: en vigas, cables, etc. Ejemplos de fuerzas distribuidas: 1) En una viga, debido a una carga W = W(x) Curva de carga w w( X ) W( x ) : Función de carga (fuerza/longitud) W( x ) = P( x ) . a Ancho de la viga Presión 21 2) En una torre de alta tensión, debido a la fuerza del viento. T1 Carga o fuerza del viento T2 Magnitud de la fuerza resultante debido a una carga uniformemente distribuida Para calcular resultante y la magnitud de la fuerza ( FR ) , debido a la carga W W( x ) que actúa sobre la viga, analizo un diferencial de fuerza dF que actúa en el diferencial de dF dx y mediante un proceso de integración hallo la fuerza resultante ( FR ) . longitud Se cumple: x x Integrando: dF W( x ) . dx dA FR 0 dF W( x ) dx dx FR W( x ) dx Area Conclusión: la magnitud de la fuerza resultante es igual al área total bajo el diagrama de carga. Ubicación de la fuerza resultante debido a una carga uniformemente distribuida “La fuerza resultante tiene una línea de acción que pasa a través del centroide C (centro geométrico) del área definida por el diagrama de carga distribuida W( x ) ” y La coordenada x del centroide se calcula con la siguiente expresión: FR x C x dA dA O también: xW x W ( x) x x L ( x) dx dx 22 Nota: Si la carga de presión P(x) es tridimensional, la fuerza resultante tiene una magnitud igual al volumen bajo la curva de carga distribuida P = P(x), y una línea de acción que pasa a través del centroide de dicho volumen. 3.2 CONDICIONES DE EQUILIBRIO DE UN CUERPO RÍGIDO Un cuerpo rígido se halla en equilibrio cuando la suma de todas las fuerzas externas que actúan sobre él es igual a cero, y la suma de todos los momentos producidos por estas fuerzas, respecto a un punto ubicado dentro o fuera del cuerpo, así como los momentos de par, también es igual a cero. Ecuaciones para el equilibrio de un cuerpo rígido Para el equilibrio de un cuerpo rígido se requiere que la fuerza resultante y el momento resultante actuando sobre el cuerpo sean iguales a cero. Ecuaciones vectoriales de equilibrio F 0 M 0 Fx i Fy j Fz k 0 Mx i M y j Mz k 0 Ecuaciones escalares de equilibrio: F F F x 0 y 0 z 0 Tres ecuaciones escalares de equilibrio de fuerzas M M M x 0 y 0 z 0 Tres ecuaciones escalares de equilibrio de momentos Estas seis ecuaciones escalares del equilibrio pueden utilizarse para resolver como máximo seis incógnitas en el diagrama de cuerpo libre (DCL). 3.3 CUERPOS ESTÁTICAMENTE INDETERMINADOS Son aquellos cuerpos cuyo diagrama de cuerpo libre contiene un número de incógnitas, fuerzas o pares, mayor que el número de ecuaciones de equilibrio. 23 Ejemplo 1: El cuerpo tiene más soportes que el mínimo necesario para mantenerlo en equilibrio. En este caso el cuerpo tiene soportes de más. Por ejemplo, en la figura se muestra una viga empotrada soportando una carga F de magnitud conocida, y apoyada sobre dos rodamientos. DCL de la viga F F A Ax M C B Cy Ay By Del DCL de la viga notamos que hay un total de 5 incógnitas, sin embargo para un equilibrio en el plano de un cuerpo rígido podemos plantear como máximo tres ecuaciones. Esto hace que el cuerpo sea estáticamente indeterminado. * Incógnitas: Ax , Ay , By , C y y M * Ecuaciones: FX 0 , Fy 0 , M 0 Ejemplo 2: Los soportes de un cuerpo están diseñados o colocados inadecuadamente de modo que no se puede mantener el equilibrio, en tal caso el cuerpo tiene soportes impropios. F F A B Ay By Del DCL de la viga notamos que la componente horizontal de F no se equilibre con ninguna fuerza, por lo tanto la viga no permanece en equilibrio. En este caso se dice que los soportes son impropios. 24 3.4 TABLA 3.1 – Soportes para cuerpos rígidos sometidos a sistemas de fuerzas bidimensionales 25 TABLA 3.1 – Soportes para cuerpos rígidos sometidos a sistemas de fuerzas bidimensionales (Continuación) Fuente: HIBBELER R.C. Ingeniería Mecánica. Estática. Décimo Segunda Edición. Prentice Hall. 2010 26 3.5 TABLA 3.2– Soportes para cuerpos rígidos sometidos a sistemas de fuerzas tridimensionales 27 TABLA 3.2– Soportes para cuerpos rígidos sometidos a sistemas de fuerzas tridimensionales (Continuación) Fuente: HIBBELER R.C. Ingeniería Mecánica. Estática. Décimo Segunda Edición. Prentice Hall. 2010 28 3.6 PROBLEMAS RESUELTOS DE EQUILIBRIO DE UN CUERPO RÍGIDO PROBLEMA Nº 1 La torre de la figura tiene 70 m de altura. La tensión en los cables BC, BD y BE tiene una magnitud de 2 kN. Considere la base de la torre como un soporte fijo. ¿Qué valores tienen las reacciones en A? y (m) B C (-50; 0; 0) E (40; 0; -40) A D (20; 0; 50) x (m) z (m) Resolución Para resolver problemas de equilibrio de cuerpos rígidos en el espacio, se recomienda seguir el siguiente procedimiento: 1ro. Hacer el DCL del cuerpo rígido completo. Recuerde que sólo deben graficarse las fuerzas externas que actúan sobre dicho cuerpo rígido. 2do. Determinar la expresión vectorial de cada una de las fuerzas que actúan sobre el cuerpo rígido analizado. 3ro. Aplicar las ecuaciones de equilibrio para calcular las incógnitas solicitadas. Para ello se recomienda aplicar primero M 0 con respecto a un eje especifico o con respecto a un punto, y luego F 0 . 29 DCL de la torre (cuerpo rígido completo) Las fuerzas externas que actúan sobre la torre son: las fuerzas en los cables BC, BD y BE, y la fuerza de reacción en el soporte fijo A (esta fuerza de reacción se descompone en tres componentes: R AX , R AY y R AZ ). Además, dado que en A existe un soporte fijo, en este punto actúa un par que se descompone es tres componentes: M X , M Y y M Z . Asimismo, asumiremos que el punto A está ubicado en el origen de los ejes coordenados. y (m) B FBC FBE FBD C (-50; 0; 0) R AZ R AX E (40; 0; -40) A MZ R AY D (20; 0; 50) MX x (m) MY z (m) Expresión vectorial de cada una de las fuerzas que actúan sobre la torre R A ( R AX ; R AY ; R AZ ) FBC ( FBC ) BC ; donde: FBC 2 kN y BC ( 50 70 ; ; 0) 86,02325 86,02325 FBC (1,1625 kN ; 1,6275 kN ; 0) FBD ( FBD ) BD ; donde: FBD 2 kN y BC ( 20 70 50 ; ; ) 88,31761 88,31761 88,31761 FBD (0,4529 kN ; 1,5852 kN ; 1,1323 kN) 30 FBE ( FBE ) BE ; y BE ( FBE 2 kN donde: 40 70 40 ; ; ) 90 90 90 FBE (0,88889 kN ; 1,5556 kN ; 0,8889 kN) Además, el par que actúa en A se expresa como: M (M X ; M Y ; M Z ) Cálculo de RAX ; RAY y RAZ (componentes de la fuerza de reacción en A) Aplicando las tres ecuaciones escalares de equilibrio de fuerzas, tenemos: F 0 x RAX 1,1625 kN 0,4529 kN 0,8889 kN 0 RAX 0,1793 kN R AX indica que esta fuerza está en dirección contraria, es Nota.- recuerde que el signo negativo de decir sigue la dirección –x. F 0 RAY 1,6275 kN 1,5852 kN 1,5556 kN 0 F 0 RAZ 1,1323 kN 0,8889 kN 0 Y Y RAY 8,7682 kN RAZ 0,2433 kN Luego, la fuerza de reacción en A es RA (0,1793 kN; 4,7682 kN ; 0,2433 kN) Cálculo de M X ; M Y y M Z (componentes del par en A) Aplico primero suma de momentos totales respecto al eje x. Totales M Eje X 0 F BC F BD F BE M X M Eje X M Eje X M Eje X 0 . . . (1) Aplicando la ecuación del momento de una fuerza, respecto al eje x: F M Eje X Eje X r F Eje X ; r = vector posición que va desde el eje x hasta la fuerza Obtenemos: F BC F BD M Eje X (0 ; 0 ; 0) ; M Eje X (79 24 kN m; 0 ; 0) ; F BE M Eje X (62,23 kN m; 0 ; 0) Además: M X ( M X ; 0 ; 0) Reemplazando en (1) y despejando M X obtenemos: M X 17,01 kN m Si aplicamos suma de momentos totales respecto al eje y, tenemos: Totales M Eje Y 0 F BC F BD F BE M Y M Eje Y M Eje Y M Eje Y 0 . . . (2) 31 Como las fuerzas de tensión en los cables BC, BD y BE interceptan al eje y, entonces los momentos de estas fuerzas, respecto al eje y, son iguales a cero. Además: M Y (0 ; M Y ; 0) Luego, al reemplazar en la ecuación (2), tenemos que: MY 0 Para calcular M Z aplicamos suma de momentos totales respecto al eje z. Es decir: Totales M Eje Z 0 F BC F BD F BE M Z M Eje Z M Eje Z M Eje Z 0 . . . (2) Aplicando la ecuación del momento de una fuerza, respecto al eje z, obtenemos: F BC F BD F BE M Eje Z (0 ; 0 ; 81,34 kN m) ; M Eje Z (0 ; 0 ; 31,71kN m) ; M Eje X (0 ; 0 : 62,23 kN m) Además: M Z (0 ; 0; M Z ) Luego, al reemplazar en la ecuación (2), tenemos que: M Z 12,64 kN m Por lo tanto, el momento de par en el punto A es: M A (17,01 kN m ; 0 ; 12,64 kN m) PROBLEMA Nº 2 Si la carga tiene un peso de 200 bf , determine la fuerza de tensión en los cables CD, BD y EF y la fuerza de reacción en la rótula esférica A. 32 Resolución DCL de la estructura ABGCE (cuerpo rígido completo) Las fuerzas externas que actúan sobre la estructura ABGCE son las siguientes: peso de la carga, tensiones en los cables CD, BD y EF, y reacción en la rótula esférica A (la cual se ha descompuesto en sus tres componentes espaciales), tal como se observa en el DCL mostrado a continuación. R AZ TBD 3 pies R AX TCD TEF R AY w Expresión vectorial de cada una de las fuerzas que actúan sobre la estructura ABGCE w (0 ; 0 ; 200bf ) TBD (TBD ) BD BD (0 ; 0; 1) ; CD (0 ; 4 / 5 ; 3 / 5) ; EF (0 ; 0; 1) TBD (0 ; 0 ; TBD ) TEF (TEF ) EF ; TCD (TCD ) CD R A ( R AX ; R AY ; R AZ ) ; TCD (0 ; 4TCD / 5 ; 3TCD / 5) TEF (0 ; 0 ; TEF ) Cálculo de la tensiones TBD , TCD y TEF Para calcular las tensiones en los cables BD, CD y EF aplicamos M 0 , respecto al punto A, porque de esta manera elimino de los cálculos las componentes de la reacción en A. Es decir: 33 Totales M A TBD 0 TCD TEF w M A M A M A M A 0 . . . (1) Donde: TBD M A rAB TBD ; de la figura dada: rAB (4 ; 0 ; 0) , y se halló que: TBD (0 ; 0 ; TBD ) TBD M A (0 ; 4TBD ; 0) TCD M A rAC TCD ; de la figura dada: rAC (4 ; 4 ; 0) , y se halló que: TCD (0 ; 4TCD / 5 ; 3TCD / 5) 12 16 12 M A TCD ; TCD ; TCD 5 5 5 TCD TEF M A rAE TEF ; de la figura dada: rAE (2 ; 4 ; 0) , y se halló que: TEF (0 ; 0 ; TEF ) TEF M A (4TEF ; 2TEF ; 0) w M A rAG w ; de la figura dada: rAG (4 ; 2 ; 0) , y según dato: w (0 ; 0 ; 200bf ) w M A (400 ; 800 ; 0) bf pie Reemplazando estos momentos en la ecuación (1) y aplicando las tres ecuaciones escalares de equilibrio de momentos, tenemos: 12 TCD 4TEF 400 0 5 M X 0 M Y 0 4TBD M Z 0 . . . (2) 12 TCD 2TEF 800 0 . . . (3) 5 16 TCD 0 5 TCD 0 Reemplazando TCD 0 en las ecuaciones (2) y (3), se obtiene: TBD 150 bf ; TEF 100 bf Respuesta: TBD (0 ; 0 ; 150 bf ) ; TCD 0 ; TEF (0 ; 0 ; 100 bf ) 34 Cálculo de R A (reacción en la rótula esférica A) Para calcular R A , primero hallo sus componentes aplicando las ecuaciones escalares de equilibrio de fuerzas. Es decir: F 0 F 0 F 0 X Y Z R AX 0 4 R AY TCD 0 , se halló que: TCD 0 5 RAY 0 3 200 R AZ TBD TCD TEF 0 , se halló: TBD 150 bf , TCD 0 y TEF 100 bf 5 RAZ 50 bf Respuesta: R A (0 ; 0 ; 50 bf ) PROBLEMA Nº 3 Una placa rectangular uniforme de 285 bf se sostiene en la posición mostrada por medio de bisagras puestas en A y B, y mediante el cable DCE que pasa sin fricción por un gancho colocado en C. Si la magnitud de la tensión en ambos lados del cable es la misma, determine: a) La magnitud de la tensión en el cable. b) Las reacciones en A y B. Suponga que la bisagra en B no ejerce ninguna fuerza de empuje axial. y D 32 in. E 15 in. 22,5 in. A B 3 in. z C 3 in. x 23 in. 9 in. 35 Resolución DCL de la placa rectangular Dato: wPLACA 285bf y Por condición: La bisagra en B no ejerce ninguna fuerza de empuje axial. Es decir: R AY w R AX R AZ RBY Además: z La magnitud de la tensión en ambos lados del cable es la misma. TCE A RBX 0 TCD RB X B E RBZ x C Si las bisagras están alineadas en forma apropiada, entonces no generan pares sobre la placa. De acuerdo con la figura dada, las coordenadas de los puntos son: A (3; 0 ; 0) in , B (29 ; 0 ; 0) in , C (23; 0 ; 15) in , D (0 ; 22,5 ; 0) in , E (32 ; 22,5 ; 0) in y F (16 ; 0 ; 7,5) in Expresión vectorial de cada una de las fuerzas que actúan sobre la placa rectangular w (0 ; 285bf ; 0) TCD (T ) CD (23 ; 22,5 ; 15) 35,5 (9 ; 22,5 ; 15) 28,5 ; CD ; CE TCE (T ) CE R A ( R AX ; R AY ; R AZ ) , RB (0 ; RBY ; RBZ ) , TCD (0,649T ; 0,634T ; 0,423T ) TCE (0,316T : 0,789T : 0,526T ) a) Cálculo de “T” (magnitud de la tensión en el cable DCE) Para calcular “T” aplico M 0 en el eje AB (eje x) porque de esta manera se anulan las reacciones en A y en B (anulo cinco incógnitas). Totales M Eje x TCD 0 M Eje x w TCE M Eje x M Eje x 0 . . . (1) Aplicando la ecuación del momento de una fuerza, respecto a un eje específico, para las tensiones TCD y TCE y el peso w , se obtiene: 36 TCD M Eje x (9,51T ; 0 ; 0) ; w TCE M Eje x (2137,5 ; 0 ; 0) bf in ; Reemplazando en (1) y aplicando M X 0 , tenemos: T 100,14 bf 9,51T 2137,5 11,835T 0 M Eje x (11,835 T ; 0 ; 0) b) Cálculo de R A y R B (reacciones en las bisagras A y B) Aplicando las tres ecuaciones escalares de equilibrio de fuerzas tenemos: F 0 F 0 285 bf RAY RBY 0,634 T 0,789 T 0 F 0 R AZ RBZ 0,423T 0,526 T 0 X Y Z R AX 0,649T 0,316 T 0 R AX 33,347 bf R AY RBY 142,5 bf . . . (2) R AZ RBZ 95,033 bf . . . (3) A continuación aplico M 0 en el punto A: Totales M A 0 RB w TCD TCE M A M A M A M A 0 . . . (4) Aplicando la ecuación del momento de una fuerza, respecto a un punto, para la reacción R B , las tensiones TCD y TCE y el peso w , se obtiene: RB M A (0 ;26 RBZ ; 26 RBY ) TCD ; M A (952,35 ; 127,65 ; 1269,6) bf in ; TCE w M A (1185,15 ; 1528 ; 1580,2) bf in ; ; M A (2137,5 ; 0 ; 3705) bf in Reemplazando en la ecuación (4) y aplicando las ecuaciones escalares de equilibrio de momentos, tenemos: RBZ 53,85 bf M Y 0 26 RBZ 127,65 1528 0 M Z 0 26 RBY 1269,6 1580,2 3705 0 RBY 32,89 bf Finalmente reemplazamos R BY en (2) y R BZ en (3) y obtenemos: R AY 109,61bf R AZ 41,18 bf ; Respuesta: R A (33,347 ; 109,61 ; 41,18) bf ; RB (0 ; 32,89 ; 53,85) bf 37 PROBLEMA Nº 4 La placa de la figura está soportada por bisagras en A y B y por el cable CE, y está cargada por una fuerza en D. El borde de la placa al cual están unidas las bisagras se encuentra en el plano yz, y los ejes de las bisagras son paralelos a la línea que pasa por los puntos A y B. Las bisagras no ejercen pares sobre la placa. ¿Qué magnitud tiene la tensión en el cable CE? Si la bisagra en B no ejerce una fuerza sobre la placa en la dirección del eje de la bisagra. ¿Qué valores tienen las magnitudes de las fuerzas ejercidas sobre la placa por las bisagras en A y B? Resolución Primero determinamos las coordenadas de los puntos A, B, C, D y E. Para ello observamos la figura dada y concluimos que: A (0; 0; 0) , B(0 : 2 sen20 0 ; 2 cos 20 0 ) , C (2; 2 sen20 0 ; 2 cos 20 0 ) ; D(2 : 0 ; 0) , E (0;1; 3) A continuación hacemos el DCL de la placa, es decir graficamos la placa sola y sobre ella todas las fuerzas externas ejercidas. Luego, hallamos la expresión vectorial de cada una de las fuerzas que actúan sobre la placa y finalmente aplicamos las dos ecuaciones de equilibrio para cuerpos rígidos: M 0 y F 0 38 DCL DE LA PLACA . E R AY X R AX R AZ X X TCE RBX X R BZ X R BY X Expresión vectorial de cada una de las fuerzas que actúan sobre la placa F (2 ; 6 ; 0) kN , R A ( R AX ; R AY ; R AZ ) TCE (TCE ) CE ; CE RB ( RBX ; RBY ; RBZ ) , (2 ; 1,684 ; 1,121) 2,845 TCE (0,703TCE ; 0,592 TCE ; 0,394 TCE ) Cálculo de la magnitud de la tensión del cable CE Para calcular la tensión en el cable CE aplico M 0 respecto al eje AB, porque de esta forma cancelo las fuerzas de reacción en A y en B (las cuales también son incógnitas en este problema). Es decir: Totales M Eje AB 0 F TCE M Eje AB M Eje AB 0 . . . (1) Aplicando la ecuación del momento de una fuerza, respecto a un eje específico, para la fuerza F y la tensión TCE , se obtiene: F TCE M Eje AB (0 ; 3,853656 ; 10,580652) kN m ; Reemplazando en (1) y aplicando M Y M Eje AB (0 ; 0,4726 TCE ; 1,29756 TCE ) kN m 0 , tenemos: 3,853656 0,4726 TCE 0 TCE 8,156 kN 39 Cálculo de las magnitudes de las fuerzas ejercidas sobre la placa por las bisagras en A y B, si la bisagra en B no ejerce una fuerza sobre la placa en la dirección del eje de la bisagra. En este caso aplicamos M 0 respecto al punto B, es decir: Totales M B 0 RA F TCE M B M B M B 0 . . . (2) Aplicando la ecuación del momento de una fuerza, respecto a un punto, para la fuerza de reacción R A , la fuerza F y la tensión TCE , se obtiene: RA TCE M B (0,684 R AZ 1,879 R AY ; 1,879 R AX ; 0,684 R AX ) ; M B (0 ; 6,426 ; 9,6546) kN m F M B (11,274 ; 3,758 ; 13,368) kN m Reemplazando en la ecuación (2) y aplicando las ecuaciones escalares de equilibrio de momentos, se obtiene: 0,684 R AZ 1,879 RAY 11,274 kN 0 . . . (3) R AX 5,43 kN Aplicando las ecuaciones escalares de equilibrio de fuerzas, se obtiene: RBX 9,1624 kN R AZ RBZ 3,213464 0 . . . (4) 6 R AY RBY 4,828352 0 . . . (5) Por condición del problema: F EN LA DIRECCION DEL EJE DE LA BISAGRA EN "B" 0 Para aplicar esta condición se muestra a continuación una vista en el plano y-z: y A z 0 20 B 200 RBZ Eje de la bisagra Aplicando la condición a la figura tenemos que: RBY sen20 0 RBZ cos 200 RBY 2,747477 RBZ … (6) 200 RBY 40 Resolviendo las ecuaciones (3), (4), (5) y (6), obtenemos: RAY 6,4686 kN ; RAZ 1,2873 kN ; Las magnitudes de R A RBY 5,2908 kN ; RBZ 1,9257 kN y R B , tenemos: RA 8,543 kN R A (5,43) 2 (6,4686) 2 (1,2873) 2 RB (9,1624) 2 (5,2908) 2 (1,9257) 2 RB 10,754 kN PROBLEMA Nº 5 Para la carga aplicada sobre la viga que se muestra en la figura, determine las fuerzas de reacción en los apoyos A y B. y Parábola 1200 N/m Vértice 300 N/m B A x 6m Resolución En este tipo de problemas, primero se halla la función de carga “ w(x)” que nos permita luego calcular la fuerza resultante de las fuerzas distribuidas. Para ello aplicamos la ecuación de la parábola: ( y k ) 4 p ( x h) 2 , donde: h y k son las coordenadas del vértice de la parábola. Reemplazando los datos del problema en la ecuación de la parábola, se obtiene que: y 25x 2 300 Esta ecuación de la parábola es nuestra función de carga, es decir: y w( x ) 25x 2 300 41 Cálculo de FR y x (magnitud y ubicación de la fuerza resultante) La magnitud de la fuerza resultante de las fuerzas distribuidas está dada por: 6 FR (25 x 2 300) dx FR w( x ) dx FR 3600 N 0 La ubicación de la fuerza resultante (distancia respecto al origen de coordenadas) está dada por: 6 x x w( x) dx x (25x x FR 2 300) dx 3,75 m 0 FR Cálculo de las reacciones en los apoyos Para calcular las fuerzas de reacción en los apoyos, primero se hace el DCL de la viga y luego se aplica las ecuaciones de equilibrio de cuerpos rígidos. En este caso, las fuerzas externas que actúan sobre la viga son: la fuerza resultante de las fuerzas distribuidas y las fuerzas de reacción en los apoyos A y B. FR 3600 N R AX B A 3,75 m RAY 6m RBY Por segunda condición de equilibrio: M TOTALES A 0 RBY (6m) 3600 N (3,75m) 0 RBY 2250 N Por primera condición de equilibrio: F X F Y 0 0 RAX 0 RAY 1350 N Respuesta: RA (0 ; 1350 N ) RB (0 ; 2250 N ) 42 PROBLEMA Nº 6 Para la carga aplicada en la viga que se muestra en la figura, determine las reacciones en los apoyos, cuando w0 1,5 kN / m . 3,5 kN/m w0 50 kN.m A C B 6m 2m D 1m Resolución Primero hallo la función de carga de las fuerzas distribuidas, para ello aplicamos la ecuación de la recta: y mx b , donde “m” es la pendiente de la recta. Además sabemos que y w( x ) . A partir de la figura dada construimos la figura siguiente: y (kN/m) Se sabe: Recta 3,5 y mx b Para x 0 y 3,5 b 3,5 Para x 9 y 1,5 m 2 / 9 Luego: 1,5 0 x (m) 9 Cálculo de FR y 2 y x 3,5 w( x ) 9 x (magnitud y ubicación de la fuerza resultante de las fuerzas distribuidas) La magnitud de la fuerza resultante de las fuerzas distribuidas está dada por: 9 2 FR ( x 3,5) dx 9 0 FR w( x ) dx FR 22,5 kN La ubicación de la fuerza resultante (distancia respecto al origen de coordenadas) está dada por: 9 x x w ( x) FR dx x 2 x ( 9 x 3,5) dx 0 22,5 3,9 m 43 Cálculo de las reacciones en los apoyos FR 22,5 kN 3,9 m 1m 4,1 m 50 kN.m A C B 2m RC X 9m RBY RCY Por segunda condición de equilibrio: M TOTALES C 50 22,5(4,1) RBY (6) 0 0 RBY 7,042 kN Por primera condición de equilibrio: F X F Y 0 0 RCX 0 RCY 15,458 kN Respuesta: RB (0 ; 7,042 kN ) RC (0 ; 15,458 kN ) 44