Control Háptico de Robot Paralelo de Seis Grados de Libertad
Anuncio

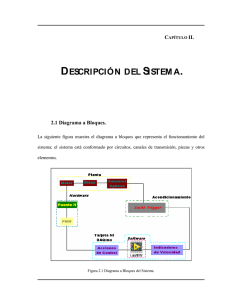
Control Háptico de Robot Paralelo de Seis Grados de Libertad "Desde IPS Norte se ha apostado por la plataforma tecnología NI LabVIEW, no sólo por la sencillez de adaptación al entorno de programación, sino por factores tan necesarios como la modularidad, escalabilidad, integración con dispositivos tanto propietarios como propios mediante conexiones ActiveX" - David Irizabal, Ingeniería, Productividad y Sistemas Norte, S.L. El Reto: Desarrollar un sistema de control robótico háptico para configuraciones de manipuladores de cadena cerrada en un entorno virtual, flexible, escalable a diferentes configuraciones, interactuando con dispositivos externos y prototipos reales. Lea el Caso de Estudio Completo La Solución: Empleo de NI LabVIEW y SolidWorks como plataformas de desarrollo para la simulación y control, generando las librerías necesarias para la monitorización, almacenamiento de datos, tratamiento matemático de la cinemática (Directa e Inversa) y control de los manipuladores con electrónica propia o diseñada en laboratorio. Autor(es): David Irizabal - Ingeniería, Productividad y Sistemas Norte, S.L. Introducción Como primer objetivo para disponer de una plataforma experimental se diseñó, modelizó e implementó un dispositivo háptico abierto, de configuración paralela y con cadena cinemática 6-GDL. Se han desarrollado los modelos y algoritmos necesarios para el control de dicho dispositivo de tal forma que sea capaz de funcionar tanto en un entorno simulado como en un entorno real El reto planteado inicialmente establecía un control de sistemas robóticos con base Stewart con tratamiento matemático complejo y control en sistemas de tiempo real determinístico. Para dar respuesta inicial a dicho control se precisaba disponer de infraestructura dedicada multi-hilo y programación en “C” interactuando con el kernel RT-Linux. Añadido a la complejidad y necesidad de recursos humanos, se analizaron las necesidades de generación de drivers específicos para la electrónica empleada (PCI DAS08) y Joystick SideWinder siendo casi inviable la opción de generación de modelos virtuales y control háptico completo con la realimentación de los motores del manipulador. En el proceso de modelado del manipulador se han empleado técnicas de linealización, de forma que el cálculo matemático inicial de sistemas de ecuaciones no lineales para los 6 actuadores lineales que componen la plataforma se complementan con sendos ejes virtuales que simplifican los sistemas de resolución matemática. Descripción de la aplicación Gracias a la sencillez de programación de la plataforma NI LabVIEW, se posibilita generar un sistema modular de control manejable en sistemas embebidos de tiempo real propios de National Instruments y que aporta igualmente opciones académicas al desarrollo del modelo. La aplicación evalúa y controla el modelado matemático, permitiendo al usuario interactuar con la conexión USB del Joystick. Esta interacción genera a su vez las correspondientes salidas analógicas de control de tarjetas para la manipulación del robot mediante Tres tecnologías: Control neumático: A través de salidas con USB-6008 y una placa de multiplexación de fabricación propia, se alimenta la base de válvulas Norgrem que suministran el caudal necesario para realizar los movimientos de cada uno de los cilindros del robot. Servo control: se está realizando la evolución del modelo para el empleo de motores mediante motion control, empleando tarjetas NI-9514. Este control aportará nuevas configuraciones en modelado de manipuladores de desplazamiento lineal (Modo rampa). Actuadores lineales servocontrolados. Según la geometría de referencia empleada en base al diseño de la plataforma Gough-Stewart, se está programando en la actualidad, con la ayuda de SolidWorks, NI SoftMotion y la aplicación de control con NI LabVIEW, un entorno de simulación para la adecuación del control PID que posteriormente se implementará en la fabricación del robot con cilindros eléctricos de gran capacidad de carga. La aplicación actualmente tiene tres modos de funcionamiento, aportando a los operadores la flexibilidad necesaria para realizar operaciones de simulación háptica (Mediante el empleo de dispositivos externos como el Joystick) simulaciones en entorno virtual con manipulación manual de cada uno de los grados de libertad del robot (Tres traslaciones y tres rotaciones) o simulación de configuraciones (Simuladas o físicas) mediante los movimientos programados de trayectorias, a modo simulación de procesos productivos. Conclusión: Desde IPSNorte se ha apostado por la plataforma NI LabVIEW, no sólo por la sencillez de adaptación al entorno de programación, sino por factores tan necesarios como la modularidad, escalabilidad, integración con dispositivos tanto propietarios como propios mediante conexiones ActiveX. La aplicación actual es un núcleo de desarrollo de sistemas robóticos de cadena cinemática cerrada con una capacidad de integración y simplicidad que proporciona a nuestros ingenieros la capacidad de desarrollo de entornos de control críticos con tiempos de adecuación y respuesta ágiles. Los módulos empleados constituyen el núcleo que posibilitará la integración de nuevos diseños de robots paralelos para entornos industriales complejos. Partiendo de modelos virtuales de configuraciones adaptadas a las necesidades del cliente y que aportan la capacidad de reducción de tiempos y coste en el desarrollo de las aplicaciones de control que permiten solapar los tiempos de fabricación de los manipuladores al tiempo que el equipo técnico desarrolla aplicaciones testadas en el entorno virtual que la oficina técnica especifica. 1/3 www.ni.com Figura 1 Modelo Geométrico del manipulador Figura 2 Estructura de la aplicación en entorno RT-Linux Figura 3 Evolución con LABVIEW de la aplicación 2/3 www.ni.com Figura 4 Generación de trayectorias pre-configuradas Legal Este caso de estudio (este "caso de estudio") fue desarrollado por un cliente de National Instruments ("NI"). ESTE CASO DE ESTUDIO ES PROPORCIONADO "COMO ES" SIN GARANTÍA DE NINGUN TIPO Y SUJETO A CIERTAS RESTRICCIONES QUE SE EXPONEN EN LOS TÉRMINOS DE USO EN NI.COM. 3/3 www.ni.com