Análisis Cinemático de Mecanismos Mediante Adamsc y su
Anuncio

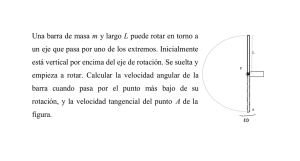
(b) point B, (c) point C. C u 100 mm P c y su Análisis CinemáticoBde Mecanismos Mediante Adams c. Comparación con Maple A Apago PDF Enhancer José Marı́a Rico Martı́nez Departamento de Ingenierı́a Mecánica. División de Ingenierı́as. Campus Irapuato-Salamanca. w Universidad de Guanajuato CP 36885, Salamanca, Gto., México Fig. E-mail: P15.173 and P15.174 [email protected] 15.174 Pin P slides in a circular slot cut in the plate shown at a constant 1 Introducción y Motivación. relative speed u 5 90 mm/s. Knowing that at the instant shown the angular velocity V of the plate is 3 rad/s clockwise and is decreasing at the rate of 5 rad/s , determine the acceleration of the pin if it is located at (a) point A, (b) point B, (c) point C. c En este apunte se mostrará como realizar el análisis cinemático de mecanismos, empleando el programa Adams c y su comparación con otras herramientas, como por ejemplo el2 programa de matemática simbólica Maple . Como un subproducto de esta comparación se obtiene la conclusión de que es importante siempre revisar y cuestionar los resultados obtenidos mediante programas de computadora en los que el usuario no tiene control sobre la operación del programa y el programa se emplea como una “caja negra” en la cual se introducen datos y se obtienen resultados. Como ejemplo se resolverá el problema 176, del capı́tulo 15, del libro “Vector Mechanics for Engineers: Statics and Dynamics. Beer, F.P., Johnston Jr. E. R., Mazurek, D. F. Cornwell, F.J. y Eisenberg, E. R., McGraw Hill. New 15.175 and 15.176 York, 2009”. Es importante notar que este problema involucra el análisis de aceleración Coriolis, un tema considerado “dificil” por la mayoria de los estudiantes de ingenierı́a mecánica y mecatrónica. B El enunciado del problema es el siguiente: Sabiendo que en el instante mostrado la barra conectada al punto B gira con una velocidad angular constante en sentido antihorario de 6 rad/s, determine las velocidad angular y la aceleración angular de la barra conectada a A. Knowing that at the instant shown the rod attached at B rotates with a constant counterclockwise angular velocity V of 6 rad/s, determine the angular velocity and angular acceleration of the rod attached at A. 0.4 m A B 30⬚ D Fig. P15.176 Figure 1: Problema número 176, capı́tulo 15, Beer y Johnston, Ninth Edition. 1 c. Solución empleando Maple 2 c . El primer paso En esta sección, el problema se resolverá empleando el programa de matemática simbólica Maple consiste en determinar los vectores de posición de D respecto de B y respecto de A, además de un vector unitario en la dirección y sentido de B a D. √ √ ~rD/B = 0 −2/15 3 0 ~rD/A = 2/5 −2/15 3 0 ûBD = 0 −1 0 De manera semejante se definirán las velocidades y aceleraciones angulares de las barras o eslabones 2 = BD y 4 = AD ω ~ 2 = 0 0 ω2 ω ~4 = 0 0 6 α ~ 2 = 0 0 α2 α ~4 = 0 0 0 2.1 Análisis de Velocidad. La ecuación vectorial que resuelve el análisis de velocidad del mecanismo está dada por ~vDOXY Z = ~vDoxyz + ω ~ 4 × ~rD/B donde OXY Z es un sistema de referencia fijo al eslabón fijo y oxyz es un sistema de referencia móvil, con origen en el punto B y sujeto a la misma rotación que la barra 2 = BD. Por lo tanto ~vDOXY Z = ω ~ 2 × ~rD/A y ~vDoxyz = v ûBD Consiguientemente, la ecuación vectorial final está dada por ω ~ 2 × ~rD/A = v ûBD + ω ~ 4 × ~rD/B Sustituyendo las componentes cartesianas de estos vectores se tiene que √ 0 0 ω2 × 2/5 −2/15 3 0 = v 0 −1 0 + 0 0 6 × 0 −2/15 √ 3 0 Las ecuaciones escalares, asociadas a las componentes x y y están dadas por √ √ 2/5 ω2 + v = 0. 2/15 ω2 3 − 4/5 3 = 0 La solución de este sistema está dado por ω2 = 6 rad/s y v = − 12 5 m/s. De forma vectorial, se tiene que 0 ω ~2 = 0 0 6 ~vDoxyz = v ûBD = 0 12 5 Debe notarse que ~vDoxyz es necesaria para calcular la componente Coriolis de aceleración. 2.2 Análisis de Aceleración. La ecuación vectorial que resuelve el análisis de aceleración del mecanismo está dada por ~aDOXY Z = ~aDoxyz + α ~ 4 × ~rD/B + ω ~4 × ω ~ 4 × ~rD/B + 2 ω ~ 4 × ~vDoxyz donde OXY Z es un sistema de referencia fijo al eslabón fijo y oxyz es un sistema de referencia móvil, con origen en el punto B y sujeto a la misma rotación que la barra 2 = BD. El último término de la ecuación es la componente Coriolis de aceleración. Esta componente Coriolis está dada por ACoriolis = 2 ω ~ 4 × ~vOxyz = −28.8 m/s2 î Este resultado es muy relevante para la discusión de los resultados. Por lo tanto ~aDOXY Z = α ~ 2 × ~rD/A + ω ~2 × ω ~ 2 × ~rD/A y ~aDoxyz = a ûBD Usando el concepto de placa representativa, la ecuación vectorial final está dada por α ~ 2 × ~rD/A − ω22 ~rD/A = a ûBD + α ~ 4 × ~rD/B − ω42 ~rD/B + 2 ω ~ 4 × ~vDoxyz 2 Donde debe notarse además que α ~ 4 = ~0. Sustituyendo las componentes cartesianas de estos vectores se tiene que √ √ 0 0 α2 × 2/5 −2/15 3 0 − (6)2 2/5 −2/15 3 0 = √ 2 12 a 0 −1 0 − (6) 0 −2/15 3 0 + 2 0 0 6 × 0 5 0 Las ecuaciones escalares, asociadas a las componentes x y y están dadas por √ 72 2/15 α2 3 + =0 2/5 α2 + a = 0. 5 √ √ La solución de este sistema está dado por α2 = −36 3 = −62.35382909 rad/s2 y a = 725 3 m/s2 = 24.94153164m/s2 . De forma vectorial, se tiene que i h √ √ α ~ 2 = 0 0 −36 3 ~aDoxyz = a ûBD = 0 − 725 3 0 Estos resultados coinciden con los reportados en el libro. 3 c. Simulación del Mecanismo en Adams c . Una mejor presentación de En esta sección se presenta la simulación del mecanismo, mediante el programa Adams c , SolidWorks c los resultados requiere que el mecanismo se modele en un programa de modelado sólido, como Inventor c o Catia . El modelo sólido se exporta en un formato que permita reconocer la geometrı́a y ensamble de los diferentes eslabones del mecanismo. c , es posible colocar los pares cinemáticos y el movimiento del eslabón motriz. Debe notarse Una vez en Adams c coloca el mecanismo en el plano X − Y , de manera que las velocidades angulares siempre que por default, Adams tendrán la dirección del eje Z. c del problema número 176, capı́tulo 15, Beer y Johnston, Ninth Edition. Figure 2: Modelo en Adams El modelo incluye varios tipos de conectores, vea la figura 2. Existe un conector con un ı́cono en forma de candado, este conector une rı́gidamente al piso —ground— el eslabón o barra horizontal, parte 2, que actuará como eslabón fijo o bastidor del mecanismo. Además, el modelo incluye tres pares de revoluta y un par prismático. 3 1. La revoluta —o joint— 2, que conecta el eslabón o barra horizontal, parte 2, con el eslabón o barra inclinada, parte 5. 2. La revoluta —o joint— 3, que conecta el eslabón o inclinada, parte 5, con el colları́n verde, parte 4. 3. La revoluta —o joint— 4, que conecta el eslabón o barra horizontal, parte 2, con el eslabón o barra vertical, parte 3. 4. El par prismático —o joint— 5, que conecta el eslabón o barra vertical, parte 3, con el colları́n verde, parte 4. Es también importante notar que cada par, sea de revoluta o prismático, requiere dos sistemas de referencia — markers— con un origen común y direcciones comunes, cada uno de los dos sistemas de referencia está localizado en cada uno de los dos eslabones que se conectan mediante el par —o joint— correspondiente. c del problema número 176, capı́tulo 15, Beer y Johnston, Figure 3: Datos del movimiento del modelo en Adams Ninth Edition. La figura 3 muestra las caracterı́sticas del movimiento asociado a la revoluta —o joint— 4, que conecta el eslabón o barra horizontal, parte 2, con el eslabón o barra vertical, parte 3. Como muestra la figura 3 el movimiento es rotacional, como debe ser para un par de revoluta con una velocidad angular de 6 rad/s. Debe notarse que esta velocidad tiene c considera positivas, exclusivamente para un signo negativo, por una razón que no encuentro explicación, Adams la tarea de modelado, las velocidades y aceleraciones angulares en la dirección horaria. Como se indicó al inicio del apunte, la velocidad angular del eslabón o barra vertical, parte 3, es de 6 rad/s en sentido antihorario, por lo que es necesario el signo negativo. Se desea programar una revolución del mecanismo, el tiempo necesario está dado pot ∆t = 2 π rad = 1.04719 seg. 6 rad/s Un número razonable de pasos —steps— para la simulación será de 1047 pasos, de manera que cada paso representa una milésima de segundo. Estas selecciones se pueden observar en la figura 4. Una vez realizada la simulación es posible grabar un video de la simulación del mecanismo. Esta grabación confirma que el movimiento asociado a la 4 c del problema número 176, capı́tulo 15, Beer y Johnston, Figure 4: Datos de la simulación del modelo en Adams Ninth Edition. revoluta —o joint— 4, que conecta el eslabón o barra horizontal, parte 2, con el eslabón o barra vertical, parte 3, es efectivamente en sentido antihorario. c con los resultados obtenidos A continuación se mostrará como comparar los resultados obtenidos por Adams c c mediante Maple . Para tal fin, se usará el postprocesador del programa Adams , que se accesa oprimiendo el ı́cono que muestra una gráfica justo en la parte inferior derecha del dialogo de simulación. Es importante señalar que el c proporciona las velocidades y aceleraciones del mecanismo durante el tiempo de simulación, en programa Adams c unicamente corresponden este caso ∆ t = 1.04719 seg. Mientras que los resultados obtenidos en el programa Maple al tiempo inicial t = 0 seg. 3.1 Verificación de los resultados del análisis de velocidad del mecanismo. En esta sección se compararán los resultados del análisis de velocidad del mecanismo obtenidos mediante el programa c con aquellos obtenidos con el programa Maple c . La figura 5 presenta las gráficas de las velocidades Adams angulares de los dos eslabones o barras. Para la parte 3, la barra vertical que es el eslabón motriz, la gráfica se denomina —PARTE3.CM Angular Velocity.Z—. Esta gráfica confirma que, efectivamente, la velocidad angular de este eslabón es constante de 6 rad/s y en sentido antihorario. Para la parte 4, la barra inclinada la gráfica se denomina —PARTE4.CM Angular Velocity.Z—. Está gráfica muestra una variación de la velocidad angular de este eslabón, pero muestra que para el tiempo t = 0 seg, la velocidad angular de este eslabón es igual a 6 rad/s y en sentido antihorario. c , donde esta velocidad angular se denomina Este resultado verifica el resultado obtenido mediante el programa Maple c ω ~ 2 . Note que Adams asocia estas velocidades angulares con el marker asociado al centro de masas del eslabón, CM, esta decisión va en contra del hecho que las velocidades angulares de los eslabones son independientes del —marker— que se emplee para calcular la velocidad angular. La figura 6 presenta las gráficas de la velocidad relativa del colları́n, parte 4, respecto a la barra vertical, parte 5. Como era de esperarse la gráfica de la velocidad relativa en la dirección del eje Z, denominada —JOINT5. Translational Velocity.Z— muestra que no hay velocidad perpendicular al plano del movimiento del mecanismo. La gráfica de la velocidad relativa en la dirección del eje X, denominada —JOINT5. Translational Velocity.X— 5 c del problema número 176, capı́tulo 15, Beer y Johnston, Figure 5: Velocidades angulares del modelo en Adams Ninth Edition. muestra que para el tiempo t = 0 seg la velocidad en la dirección horizontal X es inexistente; es decir, igual a 0. Finalmente, la gráfica de la velocidad relativa en la dirección del eje Y , denominada —JOINT5. Translational Velocity.Y— muestra que para el tiempo t = 0 seg la velocidad en la dirección vertical Y está dada por 2.4 m/s. Este resultado c , donde esta velocidad relativa se denomina ~v verifica el resultado obtenido mediante el programa Maple Doxyz . 3.2 Verificación de los resultados del análisis de aceleración del mecanismo. En esta sección se compararán los resultados del análisis de aceleración del mecanismo obtenidos mediante el proc con aquellos obtenidos con el programa Maple c . La figura 7 presenta las gráficas de las acelegrama Adams raciones angulares de los dos eslabones o barras. Para la parte 3, la barra vertical que es el eslabón motriz, la gráfica se denomina —PARTE3.CM Angular Acceleration.Z—. Esta gráfica confirma que, efectivamente, la aceleración angular de este eslabón es cero, 0 rad/s2 . Para la parte 4, la barra inclinada la gráfica se denomina — PARTE4.CM Angular Acceleration.Z—. Está gráfica muestra una variación de la aceleración angular de este eslabón, pero muestra que para el tiempo t = 0 seg, la aceleración angular de este eslabón es igual a −62.3538 rad/s2 y en c , donde esta velocidad sentido horario. Este resultado verifica el resultado obtenido mediante el programa Maple c angular se denomina α ~ 2 . Note que Adams asocia estas aceleraciones angulares con el marker asociado al centro de masas del eslabón, CM, esta decisión va en contra del hecho que las aceleraciones angulares de los eslabones son independientes del —marker— que se emplee para calcular la aceleración angular. La figura 8 presenta las gráficas de la aceleración relativa del colları́n, parte 4, respecto a la barra vertical, parte 5. Como era de esperarse la gráfica de la aceleración relativa en la dirección del eje Z, denominada —JOINT5. Translational Acceleration.Z— muestra que no hay aceleración perpendicular al plano del movimiento del mecanismo. La gráfica de la aceleración relativa en la dirección del eje X, denominada —JOINT5. Translational Acceleration.X— muestra que para el tiempo t = 0 seg la aceleración en la dirección horizontal X es igual a −28.8 m/s2 . Finalmente, la gráfica de la aceleración relativa en la dirección del eje Y , denominada —JOINT5. Translational Acceleration.Y— muestra que para el tiempo t = 0 seg la aceleración en la dirección vertical Y está dada por −24.9415 m/s2 . El resultado de la componente vertical de esta aceleración verifica la componente 6 c del problema número Figure 6: Velocidades relativas del colları́n respecto a la barra vertical del modelo en Adams 176, capı́tulo 15, Beer y Johnston, Ninth Edition. c , donde esta aceleración relativa se denomina correspondiente del resultado obtenido mediante el programa Maple ~aDoxyz . Sin embargo, para el tiempo t = 0 seg, donde el colları́n se desliza respecto a una barra vertical, es imposible que la aceleración relativa tenga una componente horizontal. ¿Cuál es la razón u origen de esta componente horizontal? La respuesta es muy sencilla, la componente horizontal que aparece es la componente Coriolis de aceleración, dada por ACoriolis = 2 ω ~ 4 × ~vOxyz = −28.8 m/s2 î Donde ω ~ 4 es la velocidad angular del eslabón motriz y ~vOxyz es la velocidad del colları́n respecto a un sistema de referencia sujeto a rotación con eje en el punto B y rotando con la velocidad angular del eslabón motriz. 7 c del problema número 176, capı́tulo 15, Beer y Johnston, Figure 7: Aceleraciones angulares del modelo en Adams Ninth Edition. 8 c del problema número Figure 8: Aceleraciones relativas del colları́n respecto a la barra vertical del modelo en Adams 176, capı́tulo 15, Beer y Johnston, Ninth Edition. c , se solicitó al programa la obtención de resultados En un intento de extraer estos resultados del programa Adams c que no son estandar para Adams . Esta solicitud se lleva a cabo mediante una “Request”, la figura 9, muestra esa solicitud. c del problema número 176, capı́tulo 15, Beer y Figure 9: Solicitud de información adicional al programa Adams Johnston, Ninth Edition. Como puede observarse se solicita la aceleración del sistema de referencia asociado al Marker 10, que forma parte del colları́n, respecto al sistema de referencia asociado al Marker 9, que forma parte de la barra motriz con respecto a la cual se desplaza el colları́n. La figura 10 muestra las direcciones del sistema de referencia asociado al Marker 9, que forma parte de la barra motriz con respecto a la cual se desplaza el colları́n. Es importante notar que esas direcciones no coinciden con las direcciones del sistema de referencia global. Finalmente la figura 11, muestra los resultados de la solicitud. Excepto por las diferencias en la orientación de los ejes, los resultados son los mismos. Esta conclusión es un cuanto c fuera capaz de proporcionar el resultado correcto. decepcionante porque esperaba que el programa Adams 9 Figure 10: Direcciones del sistema de referencia asociado al Marker 9 del modelo del problema número 176, capı́tulo 15, Beer y Johnston, Ninth Edition. Figure 11: Resultados de la Peticion “Request” del modelo del problema número 176, capı́tulo 15, Beer y Johnston, Ninth Edition. 10