Controlador lógico programable
Anuncio

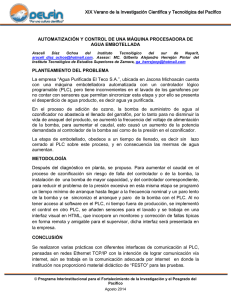
Controlador lógico programable Un Controlador Lógico Programable, más conocido por sus siglas en inglés PLC (Programmable Logic Controller), es una computadora utilizada en la ingeniería automática o automatización industrial, para automatizar procesos electromecánicos, tales como el control de la maquinaria de la fábrica en líneas de montaje o atracciones mecánicas. Los PLC son utilizados en muchas industrias y máquinas. A diferencia de las computadoras de propósito general, el PLC está diseñado para múltiples señales de entrada y de salida, rangos de temperatura ampliados, inmunidad al ruido eléctrico y resistencia a la vibración y al impacto. Los programas para el control de funcionamiento de la máquina se suelen almacenar en baterías copia de seguridad o en memorias no volátiles. Un PLC es un ejemplo de un sistema de tiempo real «duro», donde los resultados de salida deben ser producidos en respuesta a las condiciones de entrada dentro de un tiempo limitado, de lo contrario no producirá el resultado deseado.[1] 1 Historia Su historia se remonta a finales de la década de 1960, En un rack UR2 de nueve ranuras, de izquierda a derecha: fuente cuando la industria buscó en las nuevas tecnologías elec- de alimentación PS407 4A, CPU 416-3, módulo de interfaz IM trónicas una solución más eficiente para reemplazar los 460-0 y procesador de comunicaciones CP 443-1. sistemas de control basados en circuitos eléctricos con relés, interruptores y otros componentes comúnmente utilizados para el control de los sistemas de lógica com- 2 Desarrollo binacional. En 1968 GM Hydramatic (la división de transmisión au- Los primeros PLC fueron diseñados para reemplazar los tomática de General Motors) emitió una solicitud de pro- sistemas de relés lógicos. Estos PLC fueron programapuestas para un reemplazo electrónico de los sistemas dos en lenguaje llamado Listado de instrucciones con el cableados de relés. La propuesta ganadora vino de Bed- cual las órdenes de control se le indicaban al procesador ford Associates. El resultado fue el primer PLC, desig- como un listado secuencial de códigos en lenguaje de mánado 084 porque era el proyecto de Bedford Associates quinas. Luego para facilitar el mantenimiento de los sistenº 84.[2] Bedford Associates comenzó una nueva empresa mas a controlar se introdujo un lenguaje gráfico llamado dedicada al desarrollo, fabricación, venta y mantenimien- lenguaje Ladder también conocido como diagrama de esto de este nuevo producto: Modicon (MOdular DIgital calera, que se parece mucho a un diagrama esquemático CONtroler). Una de las personas que trabajaron en ese de la lógica de relés. Este sistema fue elegido para reduproyecto fue Dick Morley, quien es considerado como cir las demandas de formación de los técnicos existenel «padre» del PLC.[3] La marca Modicon fue vendida tes. Otros autómatas primarios utilizaron un formulario en 1977 a Gould Electronics, y posteriormente adquirida de listas de instrucciones de programación. por la compañía francesa AEG y luego por la alemana Los PLCs modernos pueden ser programados de diversas Schneider Electric, el actual propietario. maneras, desde la lógica de escalera de relés, a los lengua1 2 6 jes de programación tales como dialectos especialmente adaptados de BASIC y C. Otro método es la lógica de estado, un lenguaje de programación de alto nivel diseñado para programar PLC basados en diagramas de estado. 3 Funciones La función básica y primordial del PLC ha evolucionado con los años para incluir el control del relé secuencial, control de movimiento, control de procesos, sistemas de control distribuido y comunicación por red. Las capacidades de manipulación, almacenamiento, potencia de procesamiento y de comunicación de algunos PLCs modernos son aproximadamente equivalentes a las computadoras de escritorio. Un enlace-PLC programado combinado con hardware de E/S remoto, permite utilizar un ordenador de sobremesa de uso general para suplantar algunos PLC en algunas aplicaciones. En cuanto a la viabilidad de estos controladores de ordenadores de sobremesa basados en lógica, es importante tener en cuenta que no se han aceptado generalmente en la industria pesada debido a que los ordenadores de sobremesa ejecutan sistemas operativos menos estables que los PLCs, y porque el hardware del ordenador de escritorio está típicamente no diseñado a los mismos niveles de tolerancia a la temperatura, humedad, vibraciones, y la longevidad como los procesadores utilizados en los PLC. Además de las limitaciones de hardware de lógica basada en escritorio; sistemas operativos tales como Windows no se prestan a la ejecución de la lógica determinista, con el resultado de que la lógica no siempre puede responder a los cambios en el estado de la lógica o de los estado de entrada con la consistencia extrema en el tiempo como se espera de los PLCs. Sin embargo, este tipo de aplicaciones de escritorio lógicos encuentran uso en situaciones menos críticas, como la automatización de laboratorio y su uso en instalaciones pequeñas en las que la aplicación es menos exigente y crítica, ya que por lo general son mucho menos costosos que los PLCs. 3.1 Relé lógico programable (PLR) En los últimos años, unos pequeños productos llamados relés lógicos programables (PLR), y también por otros nombres similares, se han vuelto más comunes y aceptados. Estos son muy similares a los PLC, y se utilizan en la industria ligera, donde sólo unos pocos puntos de entrada/salida (es decir, unas pocas señales que llegan desde el mundo real y algunas que salen) están involucrados, y el bajo costo es deseado. Estos pequeños dispositivos se hacen típicamente en un tamaño físico y forma común por varios fabricantes, y con la marca de los fabricantes más grandes de PLCs para completar su gama baja de producto final. La mayoría de ellos tienen entre 8 y 12 entradas digitales, 4 y 8 salidas discretas, y hasta 2 entradas analógicas. El tamaño es por lo general al- REFERENCIAS rededor de 10 cm de ancho y 7,5 cm de alto y 7,5 cm de profundidad. La mayoría de estos dispositivos incluyen una pantalla LCD de tamaño pequeño para la visualización simplificada lógica de escalera (sólo una porción muy pequeña del programa está visible en un momento dado) y el estado de los puntos de E/S. Normalmente estas pantallas están acompañados por una botonera basculante de cuatro posiciones más cuatro pulsadores más separados, y se usan para navegar y editar la lógica. La mayoría tienen un pequeño conector para la conexión a través de RS-232 o RS-485 a un ordenador personal para que los programadores pueden utilizar simples aplicaciones de Windows para la programación en lugar de verse obligados a utilizar la pantalla LCD y el conjunto de pequeños pulsadores para este fin. A diferencia de los PLCs regulares que son generalmente modulares y ampliables en gran medida, los PLRs son por lo general no modulares o expansibles, pero su precio puede ser dos órdenes de magnitud menos de un PLC y todavía ofrecen un diseño robusto y de ejecución determinista de la lógica. En los últimos años se está incluso incorporando en estos pequeños dispositivos, una conexión de red Ethernet con RJ45 que permite configurar y monitorizar el equipo de forma remota. 4 Ventajas Dentro de las ventajas que estos equipos poseen se encuentra que, gracias a ellos, es posible ahorrar tiempo en la elaboración de proyectos, pudiendo realizar modificaciones sin costos adicionales. Por otra parte, son de tamaño reducido y mantenimiento de bajo costo, además permiten ahorrar dinero en mano de obra y la posibilidad de controlar más de una máquina con el mismo equipo. Sin embargo, y como sucede en todos los casos, los controladores lógicos programables, o PLC’s, presentan ciertas desventajas como es la necesidad de contar con técnicos calificados y adiestrados específicamente para ocuparse de su buen funcionamiento. 5 Otros usos Hoy en día, los PLC no sólo controlan la lógica de funcionamiento de máquinas, plantas y procesos industriales, sino que también pueden realizar operaciones aritméticas, manejar señales analógicas para realizar estrategias de control, tales como controladores PID (Proporcional, Integral y Derivativo). 6 Referencias [1] «What IS a PLC?» (en inglés). Consultado el 23 de enero de 2013. 3 [2] M. A. Laughton, D. J. Warne (ed), Electrical Engineer’s Reference book, 16th edition,Newnes, 2003 Chapter 16 Programmable Controller [3] Alison Dunn (12 de septiembre de 2008). «The father of invention: Dick Morley looks back on the 40th anniversary of the PLC» (en inglés). Consultado el 23 de enero de 2013. 7 Enlaces externos • Programación de controladores lógicos (PLC) • Simulador de PLC Online (ladder) • Controlador logico programable • Simple PLC How-To Guides • Atipica micro PLC 4 8 ORIGEN DEL TEXTO Y LAS IMÁGENES, COLABORADORES Y LICENCIAS 8 Origen del texto y las imágenes, colaboradores y licencias 8.1 Texto • Controlador lógico programable Fuente: https://es.wikipedia.org/wiki/Controlador_l%C3%B3gico_programable?oldid=91463051 Colaboradores: PACO, Joseaperez, Lourdes Cardenal, Rolf, Murphy era un optimista, Suruena, Superzerocool, Unificacion, CEM-bot, Mpeinadopa, Rtalaman, Gacq, Biasoli, Technopat, SieBot, BOTarate, Marcelo, Pategila11, Rolfds, Tirithel, Leonpolanco, Mar del Sur, UA31, Linfocito B, Arjuno3, Luckas-bot, Boto a Boto, SuperBraulio13, Ortisa, Xqbot, Jkbw, Botarel, Halfdrag, RedBot, Nintendoking, Rocatek, Miss Manzana, EmausBot, Savh, Allforrous, Mecamático, Emiduronte, MadriCR, WikitanvirBot, Willy000015, Invadibot, Acratta, Tximitx, Elvisor, Syum90, Aosoriom, Ivanretro, Addbot, Itrofimoff, Jarould, Egis57, Rocker Hetfield, Crisrafalugar y Anónimos: 91 8.2 Imágenes • Archivo:Siemens_Simatic_S7-416-3.jpg Fuente: https://upload.wikimedia.org/wikipedia/commons/f/f3/Siemens_Simatic_S7-416-3. jpg Licencia: Public domain Colaboradores: Trabajo propio Artista original: Mixabest 8.3 Licencia del contenido • Creative Commons Attribution-Share Alike 3.0