Series de Tiempo
Anuncio

Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Procesos ARMA: Estimación
Supongamos que la serie de tiempo x1 , . . . , xT ha sido
generada por un proceso ARMA(p,q):
Causal, invertible y gaussiano.
Cuyos órdenes p y q son conocidos.
Representemos dicho proceso a través de
Xt = c + φ1 Xt−1 + φ2 Xt−2 + · · · + φp Xt−p
+at + θ1 at−1 + θ2 at−2 + · · · + θq at−q .
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Los parámetros c, φ1 , . . . , φp , θ1 , . . . , θq y σa2 son desconocidos.
A continuación, abordaremos su estimación.
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Procesos ARMA: Estimación por mı́n. cuadrados condicionados
Germán
Aneiros Pérez
Dados (c̃, φ̃1 , . . . , φ̃p , θ̃1 , . . . , θ̃q ), se consideran los residuos
Introducción
ât = Xt − c̃ − φ̃1 Xt−1 − · · · − φ̃p Xt−p − θ̃1 ât−1 − · · · − θ̃q ât−q
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
y la suma de sus cuadrados
T
X
S c̃, φ̃1 , . . . , φ̃p , θ̃1 , . . . , θ̃q =
ât2
t=1
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
La estimación de los parámetros c, φ1 , . . . , φp , θ1 , . . . , θq por
medio del método de mı́nimos cuadrados condicionados se
obtiene a través de los valores (ĉ, φ̂1 , . . . , φ̂p , θ̂1 , . . . , θ̂q ) que
minimizan a la función S condicionada a que
â1−q = â2−q = · · · = â0 = â1 = · · · = âp = 0.
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Procesos ARMA: Estimación por máxima verosimilitud
La credibilidad que los valores c̃, φ̃1 , . . . , φ̃p , θ̃1 , . . . , θ̃q , σ̃a2 dan
a la serie x1 , . . . , xT se mide a través de la función de
verosimilitud:
Lx1 ,...,xT c̃, φ̃1 , . . . , φ̃p , θ̃1 , . . . , θ̃q , σ̃a2 =
fc̃,φ̃1 ,...,φ̃p ,θ̃1 ,...,θ̃q ,σ̃2 (x1 , . . . , xT ) ,
a
donde fc̃,φ̃1 ,...,φ̃p ,θ̃1 ,...,θ̃q ,σ̃2 denota a la función de densidad
a
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
conjunta de un vector aleatorio (X̃1 , . . . , X̃T )0 procedente de un
proceso ARMA con parámetros c̃, φ̃1 , . . . , φ̃p , θ̃1 , . . . , θ̃q , σ̃a2 .
Nota: A partir de ahora, suprimiremos los subı́ndices en las
funciones de densidad y verosimilitud; esto es, serán denotadas
por f y L, respectivamente.
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos ARMA: Estimación por máxima verosimilitud
La estimación de máxima verosimilitud de los parámetros
c, φ1 , . . . , φp , θ1 , . . . , θq y σa2 se obtiene a través de los valores
que dan mayor credibilidad a la serie x1 , . . . , xT .
Por tanto, la estimación de los parámetros c, φ1 , . . . , φp ,
θ1 , . . . , θq y σa2 por medio del método de máxima verosimilitud
se obtiene a través de los valores (ĉ, φ̂1 , . . . , φ̂p , θ̂1 , . . . , θ̂q y
σ̂a2 ) que maximizan a la función de verosimilitud L.
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Procesos ARMA: Estimación por máxima verosimilitud
Ejemplo: {Xt }t es un proceso ARMA(p,q) gaussiano
L c̃, φ̃1 , . . . , φ̃p , θ̃1 , . . . , θ̃q , σ̃a2 =
−1
(xT −µ̃T )0 ṼT
(xT −µ̃T )
r
exp
−
2
(2π)T ṼT 1
!
,
donde xT = (x1 , . . . , xT )0 , µ̃T = (µ̃, . . . , µ̃)0 con
µ̃ = E X̃t = c̃/ 1 − φ̃1 − · · · − φ̃p
y ṼT es la matriz de varianzas-covarianzas del vector aleatorio
(X̃1 , . . . , X̃T )0 procedente de un proceso ARMA(p,q) con
parámetros c̃, φ̃1 , . . . , φ̃p , θ̃1 , . . . , θ̃q y σ̃a2 .
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos ARMA: Estimación por máxima verosimilitud
Ejemplo: Proceso AR(1) gaussiano Xt = c + φ1 Xt−1 + at
Se tiene que
S
c̃,
φ̃
1
1/2
−T /2
,
exp −
L c̃, φ̃1 , σ̃a2 = 2πσ̃a2
1 − φ̃21
2
2σ̃a
Procesos
ARIMA:
Definición e
identificación
donde
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
S c̃, φ̃1 = 1 −
φ̃21
x1 −
c̃
1 − φ̃1
2
T
X
+
(xt − c̃ − φ̃1 xt−1 )2
t=2
Los valores de c̃, φ̃1 y σ̃a2 que maximizan a la función L dan
lugar a los estimadores de máxima verosimilitud de los
parámetros del AR(1) gaussiano.
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos ARMA: Estimación por máxima verosimilitud
Bajo condiciones adecuadas, se tiene que:
Los estimadores de máxima verosimilitud de los
parámetros µ, φ1 , . . . , φp , θ1 , . . . , θq de un ARMA(p,q)
gaussiano son asintóticamente óptimos: Si el tamaño T
de la serie es grande, se puede considerar que
1
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
2
3
Son centrados (o insesgados).
Son eficientes.
Su distribución es normal.
El estimador de máxima verosimilitud de σa2 es consistente.
Nota: La importancia de la propiedad 3 radica en que nos
permite construir intervalos/regiones de confianza y constrastes
de hipótesis referentes a los parámetros. Las propiedades 1 y 3
se mantienen para estimadores basados en la verosimilitud
gaussiana, aunque el proceso no sea gaussiano.
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Identificación
Serie, fas y fap
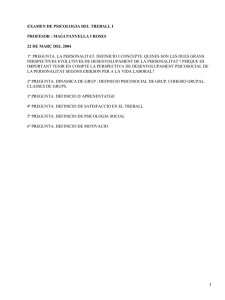
En un ejemplo anterior,
habı́amos hecho un análisis
básico de cierta serie y de sus
fas y fap muestrales (gráfico de
la derecha). Dicho análisis
sugerı́a que la serie podrı́a
haber sido generada por un
proceso AR(2).
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Procesos ARMA: Estimación
Si estimamos sus parámetros por máxima verosimilitud resulta:
φb1 = −0.4201 (0.0942), φb2 = 0.3096 (0.0943),
µ
b = 0.0473 (0.0794) y σ
ba2 = 0.7799.
Observamos que, al 5%, la media µ no es significativamente
distinta de cero. Pasamos por tanto a estimar un AR(2) con
µ = 0.
Nota: Estimar un ARMA(p,q) con µ = 0 es lo mismo que
estimar un ARMA(p,q) con c = 0, pues se tiene que
c = µ (1 − φ1 − · · · − φp ).
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Procesos ARMA: Estimación
Bajo la restricción µ = 0, se obtienen las estimaciones:
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
φb1 = −0.4149 (0.0939), φb2 = 0.315 (0.094) y σ
ba2 = 0.7826,
resultando todos sus parámetros significativamente distintos de
cero (al 5%).
Por tanto, el AR(2) estimado es:
Xt = −0.4149Xt−1 + 0.315Xt−2 + at ,
siendo 0.7826 la varianza del ruido blanco.
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Procesos ARMA: Diagnosis
Una vez que un modelo ARMA ha sido ajustado, la siguiente
etapa es la “comprobación”de que las hipótesis básicas
realizadas sobre él se verifican. Esto se conoce como la
diagnosis o chequeo del modelo ajustado.
La hipótesis más importante es la que exige que las
innovaciones {at }t sean ruido blanco, esto es:
Tengan media cero.
Tengan varianza constante.
Estén incorreladas.
Su no verificación invalida al modelo ajustado como
posible generador de la serie de tiempo en estudio.
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Procesos ARMA: Diagnosis
La hipótesis de normalidad es conveniente por tres
motivos:
1
2
3
Bajo normalidad, el ruido blanco equivale a la
independencia. Esto garantiza que no estamos dejando
información por modelizar.
Bajo normalidad, los estimadores que utilizamos (máxima
verosimilitud gaussiana) son asintóticamente eficientes.
Próximamente realizaremos predicciones de valores futuros
del proceso, resultando conveniente que vayan
acompañadas de intervalos de predicción. Si no tenemos
normalidad, no podremos “garantizar”su nivel de
confianza.
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Procesos ARMA: Diagnosis
A continuación, presentamos algunos gráficos que nos pueden
asesorar acerca de si una muestra y1 , . . . , yT es o no una
realización de un conjunto de variables aleatorias procedentes
de un proceso de ruido blanco gaussiano.
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Procesos ARMA: Diagnosis
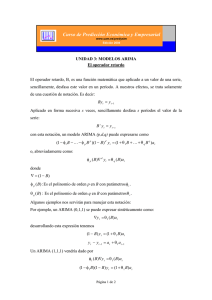
El gráfico de la muestra frente al tiempo
La representación gráfica de la muestra frente al tiempo puede
ayudarnos a detectar de manera visual y rápida la presencia de:
Tendencia.
Componente estacional.
Variabilidad no constante.
Dependencia lineal
Positiva: tendencias que desaparecen a corto plazo
(tendencias locales).
Negativa: valores altos son seguidos con frecuencia por
valores bajos, y viceversa (zig-zag).
Cualquiera de estas situaciones invalidarı́a la hipótesis de ruido
blanco.
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Dependencia positiva vs Dependencia negativa
Germán
Aneiros Pérez
Dependencia positiva
Dependencia negativa
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos ARMA: Diagnosis
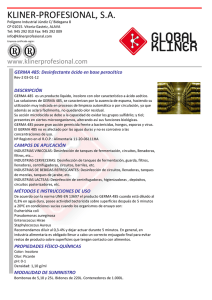
El gráfico Q-Q normal
El gráfico Q-Q (Cuantil-Cuantil) normal representa a los
cuantiles muestrales frente a los cuantiles de una distribución
N (0, 1).
Si la muestra y1 , . . . , yT es i.i.d. con distribución normal, su
gráfico Q-Q normal deberı́a ser aproximadamente lineal.
Por tanto, la no linealidad del gráfico Q-Q normal sugiere
ausencia de normalidad.
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Normalidad vs Falta de normalidad
Germán
Aneiros Pérez
Normalidad
Falta de normalidad
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Procesos ARMA: Diagnosis
A continuación, presentamos varios contrastes de hipótesis
diseñados para contrastar si una muestra y1 , . . . , yT es una
realización de un conjunto de variables aleatorias:
Independientes.
Con media cero.
Con distribución común gaussiana.
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos ARMA: Diagnosis
Contraste de independencia
Denotemos por ρbk (k = 1, 2, . . .) a la fas de la muestra en
estudio, y1 , . . . , yT .
Bajo la hipótesis nula de que la muestra proviene de variables
aleatorias i.i.d. con varianza finita, y asumiendo que el tamaño
muestral T es “grande”, se tiene que:
1
.
ρbk ≈ N 0, √
T
Por tanto, rechazaremos la independencia (al 5%) si
Procesos
ARIMA
estacionales
1.96
|b
ρk | ≥ √
T
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Procesos ARMA: Diagnosis
Contraste de independencia
Utilicemos ahora además la notación
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
QH = T (T + 2)
Procesos
ARIMA
estacionales
k=1
ρb2k
T −k
Bajo la hipótesis nula de que la muestra proviene de variables
aleatorias i.i.d. con varianza finita, y asumiendo que el tamaño
muestral T es “grande”, se tiene que:
Estimación y
diagnosis
Selección del
modelo y
predicción
PH
QH ≈ χ2H
Por tanto, rechazaremos la independencia (al 5%) si el valor de
QH es mayor o igual que el percentil 0.95 de la distribución χ2H .
Este contraste se conoce como contraste de Ljung-Box.
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Procesos ARMA: Diagnosis
Contraste de media cero
Utilicemos ahora los sı́mbolos ȳ y sy2 para denotar a la media y
a la varianza muestrales, respectivamente.
Bajo la hipótesis nula de que la muestra y1 , . . . , yT proviene de
variables aleatorias i.i.d. con media cero y varianza finita, y
asumiendo que el tamaño muestral T es “grande”, se tiene que:
y
√ ≈ tT −1 ≈ N (0, 1)
sy / T
Por tanto, rechazaremos que la media µy es cero (al 5%) si
sy
|y | ≥ 1.96 √
T
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Procesos ARMA: Diagnosis
Contraste de normalidad
Utilicemos ahora la notación
PT
PT
3
4
t=1 (yt − y )
t=1 (yt − y )
G1 =
y
G
=
−3
2
Tsy3
Tsy4
Bajo la hipótesis nula de que la muestra y1 , . . . , yT proviene de
variables aleatorias i.i.d. con distribución gaussiana, y
asumiendo que el tamaño muestral T es “grande”, se tiene que:
2
G1
G22
T
+
≈ χ22
6
24
Rechazaremos la normalidad (al 5%) si el valor del estadı́stico
es mayor o igual que el percentil 0.95 de la distribución χ22 .
Este contraste se conoce como contraste de Jarque-Bera.
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Procesos ARMA: Diagnosis
Contraste de normalidad
P
2
[T /2]
y
−
y
b
t,T
(T −t+1)
(t)
t=1
Sea ω =
, donde y(t) denota
2
Tsy
al estadı́stico ordenado de orden t y las constantes bt,T vienen
dadas a partir de la inversa de la distribución normal estándar.
El estadı́stico ω puede interpretarse como el cuadrado del
coeficiente de correlación lineal de los puntos muestrales
dibujados sobre papel probabilı́stico normal. Puesto que bajo la
hipótesis nula de que y1 , . . . , yT son i.i.d. con distribución
gaussiana dicho gráfico deberı́a ser aproximadamente lineal, se
rechaza la normalidad para valores pequeños de ω. Shapiro y
Wilk tabularon los valores de bt,T , y la distribución de ω bajo
la hipótesis Germán
nula.Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Procesos ARMA: Diagnosis
Los gráficos y contrastes de hipótesis que acabamos de
presentar nos ayudarán en la verificación de si el modelo ARMA
propuesto es o no adecuado como generador de nuestra serie
de tiempo (etapa de chequeo o diagnosis).
Concretamente, nos asesorarán en la toma de la decisión
referente a si las innovaciones at del modelo ARMA son o no
ruido blanco con distribución gaussiana.
Puesto que las innovaciones at no son observables, lo que se
hace es “estimarlas”y realizar el chequeo sobre dichas
estimaciones (esto es, sobre los residuos ât del modelo
estimado o ajustado).
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Procesos ARMA: Diagnosis
Los contrastes de independencia aplicados a los residuos ât
sufren las siguientes modificaciones (con respecto a su
aplicación a las innovaciones at ):
Contraste basado en la distribución de cada
autocorrelación muestral ρbk : La varianza asintótica de ρbk ,
para retardos k “pequeños”, deja de ser 1/T (es menor
que 1/T ).
Contraste de Ljung-Box: Los grados de libertad de la
distribución asintótica de QH pasan a ser H − p − q − 1 o
H − p − q, dependiendo de que el ARMA tenga o no
constante, respectivamente (necesitamos por tanto que
H > p + q + 1 o H > p + q, respectivamente).
En ambos casos, la región de rechazo resulta modificada.
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
A continuación, pasamos a
realizar la diagnosis del modelo
AR(2) que habı́amos estimado
para cierta serie. Para ello,
utilizaremos los gráficos y
contrastes que acabamos de
proponer.
Gráficos de residuos y Q-Q
normal
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Contrastes de independencia
Introducción
Procesos
ARMA:
Definición e
identificación
Contrastes de media cero y
normalidad
µa = 0:
p − valor = 0.5637
Normalidad:
Procesos
ARIMA:
Definición e
identificación
Jarque-Bera:
p − valor = 0.8715
Estimación y
diagnosis
Shapiro-Wilk:
p − valor = 0.9016
Selección del
modelo y
predicción
Conclusión: Un AR(2)
gaussiano es un modelo
apropiado como generador de
la serie analizada.
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos ARIMA: Estimación y diagnosis
Como consecuencia de la estrecha relación existente entre los
procesos ARIMA y los procesos ARMA:
{Xt }t es ARIMA(p,d,q) ⇔ (1 − B)d Xt es ARMA(p,q)
se tiene que para estimar y realizar la diagnosis de un modelo
ARIMA es suficiente:
Identificar el orden de diferenciación regular, d.
Saber estimar y realizar la diagnosis de un modelo ARMA.
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos ARMA: Selección del modelo
Las etapas que hemos seguido para proponer un modelo ARMA
como posible generador de una serie de tiempo han sido:
1
Procesos
ARMA:
Definición e
identificación
Asesorarnos (gráficamente) acerca de la “estacionariedad
de la serie ”. Si es estacionaria, pasar a la etapa 2.
2
Procesos
ARIMA:
Definición e
identificación
Identificar los órdenes p y q del ARMA: estudio de sus fas,
fap y fase muestrales.
3
Estimar el modelo cuyos órdenes se identificaron en la
etapa 2: mı́n. cuadr. condicionados, máx. verosimilitud.
4
Chequear el modelo estimado: análisis de residuos.
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Si los residuos pueden ser considerados como procedentes de
un proceso de ruido blanco (preferiblemente gaussiano), el
modelo estimado es propuesto como posible generador de la
serie de tiempo.
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Procesos ARMA: Selección del modelo
Como acabamos de recordar, hemos basado la etapa
correspondiente a la identificación de los órdenes p y q del
ARMA en el estudio de las fas, fap y fase muestrales.
Las fas, fap y fase muestrales pueden llevarnos a
identificar varios procesos como posibles generadores de la
serie de tiempo.
Es posible que haya algún proceso distinto de los
identificados que sea preferible a ellos.
Parece entonces necesario establecer criterios que nos permitan
determinar, entre varios modelos, cuál es preferible.
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Procesos ARMA: Selección del modelo
Denotemos por k a la cantidad de coeficientes de un modelo
ARMA (esto es, k = p + q + 1 o k = p + q para un
ARMA(p,q) con o sin constante, respectivamente), y por ϕk+1
al vector formado por dichos coeficientes y por σa2 .
Se propone seleccionar aquel modelo ARMA que minimice el
valor de una de las funciones siguientes:
AIC = −2ln L(ϕk+1 ) + 2 (k + 1)
(Criterio de Información de Akaike).
AICC = −2ln L(ϕk+1 ) + 2 (k + 1) T / (T − k − 2)
(Criterio de Información de Akaike corregido).
BIC = −2ln L(ϕk+1 ) + (k + 1) ln (T )
(Criterio de Información Bayesiano).
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Procesos ARMA: Selección del modelo
La estructura de las funciones AIC, AICC y BIC es similar:
Primer sumando: mide tanto la calidad del ajuste como la
credibilidad que le da a la serie de tiempo. Cuanto menor
es su valor mejor es el ajuste y mayor la credibilidad que le
da a la serie; su valor disminuye al aumentar k.
Segundo sumando: penaliza el aumento en la cantidad de
coeficientes del ARMA; su valor disminuye al disminuir k.
El modelo que minimiza a una de estas 3 funciones consigue un
equilibrio entre ambos sumandos (ambos serán “pequeños”);
esto es, un buen ajuste sin demasiados parámetros (que darı́an
problemas tanto a la hora de estimar como de predecir).
Las estimaciones de los parámetros del modelo seleccionado
por este proseso son estimaciones de máxima verosimilitud.
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Procesos ARMA: Selección del modelo
Comparación entre criterios
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
El criterio BIC es consistente: Si realmente la serie ha sido
generada por un ARMA, el BIC selecciona los órdenes
correctos con probabilidad 1 (esto no ocurre con los
criterios AIC y AICC).
Los criterios AIC y AICC son asintóticamente eficientes: Si
realmente la serie ha sido generada por un AR
(posiblemente de orden ∞), el AIC y el AICC seleccionan
el modelo que da lugar al menor error de predicción
esperado (esto no ocurre con el criterio BIC).
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Procesos ARMA: Selección del modelo
Continuando con el análisis de la serie (un proceso AR(2)
resultaba adecuado para haberla generado), minimizamos el
valor de la función AIC para distintos procesos ARMA(p,q)
(consideramos p y q en {0, 1, 2, 3, 4, 5}).
Los 3 valores más pequeños fueron alcanzados por el
ARMA(3,3) (AIC (3, 3) = 264.6635), por el ARMA(1,1)
(AIC (1, 1) = 264.9980) y por el AR(2) (AIC (2, 0) = 265.9452).
Puesto que el AR(2) es un modelo mucho más simple que el
ARMA(3,3) y más fácil de interpretar que el ARMA(1,1), y la
diferencia entre los valores de sus AICs es pequeña (menor de 2
unidades), el modelo AR(2) es el que finalmente seleccionamos.
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos ARMA: Predicción
Supongamos que la serie de tiempo x1 , . . . , xT ha sido generada
por un proceso ARMA {Xt }t cuyos parámetros son conocidos.
El siguiente objetivo de este tema es predecir, a partir de la
serie de tiempo observada, el valor futuro del proceso dentro de
k instantes de tiempo; esto es, predecir el valor de XT +k .
Dicha predicción se denomina predicción con origen en T y
horizonte k, y la denotaremos por b
xT (k).
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Proceso AR(1): Predicción
Supongamos que la serie ha sido generada por el proceso
Xt = 7.5 + 0.8Xt−1 + at .
Para predecir con origen en T y horizonte 1, escribimos
XT +1 = 7.5 + 0.8XT + aT +1 .
Estimación y
diagnosis
Basándonos en la relación anterior, b
xT (1) será obtenida una
vez que dispongamos de valores “apropiados”para XT y aT +1 .
Selección del
modelo y
predicción
El valor que ha tomado la v.a. XT es conocido (xT ).
Procesos
ARIMA
estacionales
El valor de la v.a. aT +1 no lo tenemos. Su predicción a
partir de la serie x1 , . . . , xT es su media (E (aT +1 ) = 0),
pues la serie no contiene información acerca de aT +1 .
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Proceso AR(1): Predicción
Ahora, para obtener la predicción b
xT (1), basta con sustituir
XT por xT y aT +1 por 0 en la ecuación
XT +1 = 7.5 + 0.8XT + aT +1 .
Dicha sustitución da lugar a la ecuación de predicción del
AR(1) a un horizonte 1:
b
xT (1) = 7.5 + 0.8xT .
Ası́, si el valor de xT fuese 1.5, la predicción del futuro valor de
XT +1 serı́a
b
xT (1) = 7.5 + 0.8 × 1.5 = 8.7
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Proceso AR(1): Predicción
Para predecir con origen en T y horizonte 2, escribimos
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
XT +2 = 7.5 + 0.8XT +1 + aT +2 .
Basándonos en la relación anterior, b
xT (2) será obtenida una
vez que dispongamos de valores “apropiados”para XT +1 y
aT +2 .
El valor de la v.a. XT +1 no lo tenemos. Su predicción a
partir de la serie x1 , . . . , xT ha sido obtenida en la
transparencia anterior (b
xT (1)).
El valor de la v.a. aT +2 no lo tenemos. Su predicción a
partir de la serie x1 , . . . , xT es su media (E (aT +2 ) = 0).
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Proceso AR(1): Predicción
Ahora, para obtener la predicción b
xT (2), basta con sustituir
XT +1 por b
xT (1) y aT +2 por 0 en la ecuación
XT +2 = 7.5 + 0.8XT +1 + aT +2 .
Dicha sustitución da lugar a la ecuación de predicción del
AR(1) a un horizonte 2:
b
xT (2) = 7.5 + 0.8b
xT (1) = 7.5 (1 + 0.8) + 0.82 xT
Ası́, si el valor de xT fuese 1.5, la predicción del futuro valor de
XT +2 serı́a
b
xT (2) = 14.46
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Proceso AR(p): Predicción
El procedimiento anterior, diseñado para predecir valores de un
AR(1) a horizontes k = 1 y k = 2, puede generalizarse
fácilmente para:
Cualquier horizonte k > 0.
Cualquier proceso autorregresivo de orden finito p > 0.
Puede demostrarse que la predicción a largo plazo de futuros
valores de un proceso AR(p) es la media del proceso; esto es,
b
xT (k) → µ si k → ∞.
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Proceso MA(1): Predicción
Supongamos que la serie ha sido generada por el proceso
Xt = 7.5 + at + 0.8at−1 .
Para predecir con origen en T y horizonte 1, escribimos
XT +1 = 7.5 + aT +1 + 0.8aT .
Basándonos en la relación anterior, b
xT (1) será obtenida una
vez que dispongamos de valores “apropiados”para aT +1 y aT .
El valor de la v.a. aT +1 no lo tenemos. Su predicción a
partir de la serie x1 , . . . , xT es su media (E (aT +1 ) = 0).
El valor de la v.a. aT no lo tenemos. Su predicción a
partir de la serie x1 , . . . , xT no es inmediata, pues dicha
serie contiene información acerca de aT .
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Proceso MA(1): Predicción
Supongamos que disponemos de una predicción del valor de aT
obtenida a partir de la serie x1 , . . . , xT (en las próximas
transparencias veremos cómo obtenerla). Denotémosla por
b
aT (0).
Ahora, para obtener la predicción b
xT (1), basta con sustituir
aT +1 por 0 y aT por b
aT (0) en la ecuación
XT +1 = 7.5 + aT +1 + 0.8aT .
Dicha sustitución da lugar a la ecuación de predicción del
MA(1) a un horizonte 1:
b
xT (1) = 7.5 + 0.8b
aT (0) .
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Proceso MA(1): Predicción
Para predecir con origen en T y horizonte 2, escribimos
XT +2 = 7.5 + aT +2 + 0.8aT +1 .
Basándonos en la relación anterior, b
xT (2) será obtenida una
vez que dispongamos de valores “apropiados”para aT +2 y
aT +1 .
Los valores de las v.a. aT +2 y aT +1 no los tenemos. Sus
predicciones a partir de la serie x1 , . . . , xT son sus medias
(E (aT +2 ) = E (aT +1 ) = 0).
Sustituyendo entonces aT +2 y aT +1 por 0 en la ecuación
anterior, se obtiene la ecuación de predicción del MA(1) a un
horizonte 2: b
xT (2) = 7.5.
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Proceso MA(1): Predicción
Existen distintas técnicas para predecir el valor de aT a partir
de la serie x1 , . . . , xT :
Utilizar la propiedad de invertibilidad del proceso:
Xt = c + at + π1 Xt−1 + π2 Xt−2 + · · ·
Procesos
ARIMA:
Definición e
identificación
Cambiando t por T y despejando aT , podemos escribir
Estimación y
diagnosis
Considerando que Xt = xt si 1 ≤ t ≤ T , y fijando Xt = µ
si t ≤ 0, se obtiene una predicción del valor de aT a partir
de la serie x1 , . . . , xT .
Cuando T es “grande”, es esperable que la modificación
realizada a los valores de Xt (t ≤ 0) tenga poco impacto
sobre los resultados finales.
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
aT = −c + XT − π1 XT −1 − · · · − πT −1 X1 − πT X0 − · · ·
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Proceso MA(1): Predicción
Germán
Aneiros Pérez
Fijar un valor inicial para a1 (en general, su media 0).
Introducción
Suponiendo que el MA(1) es
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Xt = 7.5 + at + 0.8at−1 ,
se tiene que
at = Xt − 7.5 − 0.8at−1 .
Para obtener aT a partir de la expresión anterior,
necesitamos conocer un at con 1 ≤ t < T . Ası́, fijando el
valor de a1 , podemos predecir recursivamente los valores
de at (t = 2, . . . , T ) a partir de la serie x1 , . . . , xT .
Cuando T es “grande”, es esperable que la condición
inicial (generalmente, a1 = 0) tenga poco impacto sobre
los resultados finales.
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Proceso MA(1): Predicción
Predecir aT a través de una (“la mejor”) combinación
lineal de x1 , . . . , xT .
Los coeficientes de la combinación lineal de x1 , . . . , xT que
mejor predice a aT se pueden obtener a partir de la media
y las autocovarianzas de X1 , . . . , XT , y de las covarianzas
entre cada una de estas variables y aT .
Este procedimiento es el que sigue el paquete R.
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Proceso MA(q): Predicción
El procedimiento anterior, diseñado para predecir valores de un
MA(1) a horizontes k = 1 y k = 2, puede generalizarse
fácilmente para:
Cualquier horizonte k > 0.
Cualquier proceso de medias móviles de orden finito q > 0.
Puede demostrarse que la predicción a horizontes mayores que
q de futuros valores de un proceso MA(q) es la media del
proceso; esto es,
b
xT (k) = µ si k > q.
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Procesos ARMA: Predicción
Los procedimientos utilizados para predecir valores futuros de
procesos AR(p) y MA(q) pueden ser combinados fácilmente
para predecir valores futuros de procesos ARMA(p,q).
Estimación y
diagnosis
Puede demostrarse que la predicción a largo plazo de futuros
valores de un proceso ARMA(p,q) es la media del proceso; esto
es,
Selección del
modelo y
predicción
b
xT (k) → µ si k → ∞.
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos ARIMA: Selección del modelo
Como consecuencia de la estrecha relación existente entre los
procesos ARIMA y los procesos ARMA:
{Xt }t es ARIMA(p,d,q) ⇔ (1 − B)d Xt es ARMA(p,q)
se tiene que para seleccionar un modelo ARIMA es suficiente:
Identificar el orden de diferenciación regular, d.
Saber seleccionar un modelo ARMA.
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Procesos ARIMA: Predicción
Del mismo modo, la predicción de valores futuros de procesos
ARIMA se basa en la predicción de los valores futuros de los
procesos ARMA asociados.
Los pasos a seguir son:
1
Diferenciar la serie procedente del ARIMA hasta obtener
una serie procedente de un ARMA.
2
Predecir los valores futuros del proceso ARMA.
3
Deshacer la diferenciación en las predicciones del ARMA,
obteniendo entonces las predicciones del proceso original
ARIMA.
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Intervalos de predicción
A continuación, construimos un intervalo de predicción
utilizando la distribución muestral del error de predicción:
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
bT (k).
eT (k) = XT +k − X
Se verifica que, si “T es grande”y {at }t es gaussiano, entonces
2
eT (k) ≈ N 0, σa2 1 + ψ12 + · · · + ψk−1
,
donde ψi son los coeficientes de la representación
Xt = c + at + ψ1 at−1 + ψ2 at−2 + · · ·
Un intervalo de predicción (al 95%) para el valor de XT +k será
q
bT (k) ± 1.96 σ 2 1 + ψ 2 + · · · + ψ 2
X
.
a
1
k−1
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Intervalos de predicción
Observación
En el cálculo de la varianza asintótica del error de predicción,
bT (k) ≈ σ 2 1 + ψ 2 + · · · + ψ 2
Var XT +k − X
a
1
k−1 ,
las estimaciones de los parámetros incluidos en la predicción
bT (k) fueron tratadas como fijas (esto es, como si no
X
dependiesen de los valores del proceso estocástico {Xt }).
Sin embargo, puesto que dichas estimaciones dependen de la
serie x1 , . . . , xT , también dependen de los valores de {Xt }.
Esto provoca un cambio en la varianza del error de predicción, y
por tanto en los intervalos de predicción. Este cambio se puede
considerar despreciable si el tamaño de la serie es “grande”.
Germán Aneiros Pérez
Series de Tiempo
Modelos Box-Jenkins
Series de
Tiempo
Germán
Aneiros Pérez
Introducción
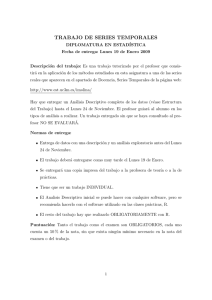
Para finalizar el estudio de la serie, realizamos predicciones
basadas en el modelo AR(2) que habı́amos seleccionado.
Horizonte de predicción: k=5
Horizonte de predicción: k=30
Procesos
ARMA:
Definición e
identificación
Procesos
ARIMA:
Definición e
identificación
Estimación y
diagnosis
Selección del
modelo y
predicción
Procesos
ARIMA
estacionales
Aplicación a
datos reales
Germán Aneiros Pérez
Series de Tiempo