Reciprocal Identities Quotient Identities Pythagorean Identities sin
Anuncio

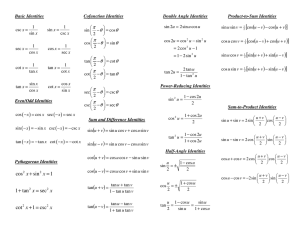
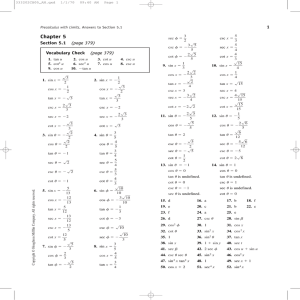
Reciprocal Identities 1 1 1 sin u cos u tan u csc u sec u cot u 1 1 1 csc u sec u cot u sin u cos u tan u Quotient Identities sin u cos u tan u cot u cos u sin u Pythagorean Identities sin 2 u cos 2 u 1 1 cot 2 u csc 2 u 2 2 1 tan u sec u Cofunction Identities sin u cos u cot u tan u 2 2 cos u sin u sec u csc u 2 2 tan u cot u csc u sec u 2 2 Even/Odd Identities sin(u ) sin u cot(u ) cot u cos( u ) cos u sec( u ) sec u tan(u ) tan u csc(u ) csc u Double-Angle Formulas sin 2u 2sin u cos u cos 2u cos 2 u sin 2 u 2 cos 2 u 1 1 2sin 2 u 2 tan u tan 2u 1 tan 2 u Power-Reducing Formulas 1 cos 2u 1 cos 2u sin 2 u cos 2 u 2 2 1 cos 2u 2 tan u 1 cos 2u Sum-to-Product Formulas uv uv sin u sin v 2 sin cos 2 2 uv uv sin u sin v 2 cos sin 2 2 uv uv cos u cos v 2 cos cos 2 2 uv uv cos u cos v 2 sin sin 2 2 Product-to-Sum Formulas 1 sin u sin v [cos(u v) cos(u v)] 2 1 cos u cos v [cos(u v) cos(u v)] 2 1 sin u cos v [sin(u v) sin(u v)] 2 1 cos u sin v [sin(u v) sin(u v)] 2 Sum and Difference Formulas sin(u v) sin u cos v cos u sin v cos(u v) cos u cos v sin u sin v tan(u v) tan u tan v 1 tan u tan v Half Angle Formulas u u 1 cos u 1 cos u sin cos 2 2 2 2 u 1 cos u sin u tan or 2 sin u 1 cos u 1 3 , 2 2 0,1 1 3 , 2 2 90 2 2 2 2 , 120 3 3 60 3 4 135 45 4 5 150 30 6 6 2 2 2 , 2 3 1 , 2 2 1, 0 3 1 , 2 2 2 2 , 0˚ 180 0 2 2 3 1 , 2 2 360 360 22 210 1, 0 330 7 11 3 , 1 2 225 2 6 5 315 6 7 240 300 4 4 2 5 4 2 , 2 2 3 2 2 3 3 270 2 1 3 , 2 2 (0,-1) 1 3 , 2 2