INTRODUCCIÓN A LOS PROBLEMAS NO LINEALES
• RASGOS DISTINTIVOS DE LOS PNL.
Forma de un problema de optimización no lineal.
Concepto de óptimos locales y globales.
Estrategia de los algoritmos de descenso.
• PROBLEMAS SIN RESTRICCIONES: Ejemplos.
Problema de lote óptimo de pedido en un inventario.
Ajuste no lineal.
• PROBLEMAS CON RESTRICCIONES: Ejemplos.
Localización de torres de transmisión.
Problema de equilibrio de mercados.
MIOPD.FIB
I.O.E. dística
UPC
PP
ROGRAMACIÓN NO LINEAL SIN RESTRICCIONES
CONCEPTOS BÁSICOS.
Definición de mínimo local y global
Representación a lo largo de una dirección de f.
Concepto de dirección de descenso. f. Dif.
CONDICIONES DE OPTIMALIDAD
Necesarias de 1er orden.
Funciones convexas dif. Propiedades básicas.
Funciones cuadráticas y funciones 2-dif.
Necesarias y suficientes de 2º orden
MÉTODO DEL GRADIENTE Y EXPLORACIÓN LINEAL.
MIOPD.
I.O.E. FIB
ca
UPC
x3
B
A
VÉRTICE A
x1
x2
MIOPD.
I.O.E. FIB
de Estadística
UPC
x3
B
C
VÉRTICE B
x1
x2
VÉRTICE C
ÓPTIMOS ALTERNATIVOS
MIOPD.
FIB
I.O.E.
Diplomatura
de
UPC
Recorriendo las diferentes bases
encontraríamos los puntos C, D, E, F.
x3
C
En todos ellos la f.obj. tiene igual
valor: z* = 220/15.
F
G
E
D
x1
Cualquier punto G sobre la
cara tendrá igual valor para la
f.obj.
( COMPROBADLO)
x2
MIOPD.
I.O.E. FIB
Diplomatura de
UPC
EFICACIA DEL ALGORITMO SÍMPLEX
• En el ejemplo anterior se examinan sólo 3 de los 9 vértices del
poliedro.
• Hay ejemplos en los que el algoritmo debe examinarlos TODOS
(Klee-Minty, 1972). ⇒ PEOR CASO POSIBLE.
x3
x2
x1
MIOPD.
FIB
I.O.E. Diplomatura
de
UPC
Introducción a los Problemas No Lineales (P.N.L.)
• Un P.N.L. es un problema de programación
matemática donde la F.O. o alguna restricción és no
lineal.
• Las propiedades y características de estos
problemas son distintas a los de P.L.
• En consecuencia: Los algoritmos de optimización
que se utilizan para resolver PNL's son muy
diferentes a los utilizados en los P.L.
• La utilización de "RESOLVEDORES" (Solvers) en
lenguajes de modelización como AMPL esconde las
diferencias entre P.L. y P.N.L.'s.
MIOPD.
FIB
IE. Diplomatura
de
UPC
Forma General de un P.N.L
Max (Min):
s. a:
f0(x1, x2, …, xn)
f1(x1, x2, …, xn)≤0
:
fk(x1, x2, …, xn)≥0
∂ fi
∃(i , j )
≠ cte.
∂ xj
:
fm(x1, x2, …, xn)=0
• fj(x1, x2, …, xn) diferenciable ∀j
• xi continua ∀i
MIOPD.
FIB
I.O.E.
Diplomatura
UPC
43
PROBLEMA DE OPTIMIZACI´
ON NO LINEAL SIN RESTRICIONES
M in x∈IRn f (x)
f : IRn → IR, f diferenciable
∇f (x) =
∂f
∂x1
..
∂f
∂xn (x)
Curvas de nivel de
44
CAPÍTULO 1. MODELOS DE TIEMPO DE VIDA
Definici´
on de m´
ınimo local x∗ de f .
∃δ0 t.q. ∀x, x∗ − x2 ≤ δ, δ < δ0:
f (x) ≥ f (x∗)
Definici´
on de m´
ınimo local estricto x∗ de f .
∃δ0 t.q. ∀x = x∗, x∗ − x2 ≤ δ, 0 < δ < δ0:
f (x) > f (x∗)
Definici´
on de m´
ınimo global x∗ de f .
∀x ∈ IRn, f (x) ≥ f (x∗)
Definici´
on de m´
ınimo global estricto x∗ de f .
∀x ∈ IRn, x = x∗, f (x) > f (x∗)
Ejemplo: P.N.L. sin restricciones
Min
y
t
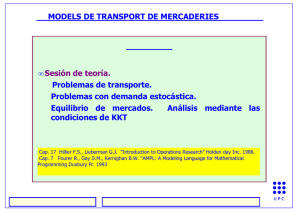
Ejemplo de P.N.L. con restricciones no lineales
– Una empresa de telefonía móvil suministra
servicio a varias ciudades.
– Quiere mejorar su servicio instalando una
nueva torre.
– La nueva torre tendrá un radio de transmisión
de 40 km y aprovechará las torres existentes
en las cuatro ciudades.
MIOPD.deFIB
plomatura
Estadística
UPC
50
C1
x=5, y=45
40
Nueva Torre
x=?, y=?
30
C3
C2
x=12, y=21
20
x=52, y=21
10
C4
x=17, y=5
0
0
10
20
I.O.D. Diplomatura de Estadística
I.O.E.
30
40
50
60
UPC
1-x
f(x)
x-1
x/2
1
NO DIFERENCIABLE !!
0,5
x
0,5 1
1,5 2
REFORMULACIÓN
(3.d) PROGRAMACIÓN NO LINEAL SIN RESTRICCIONES
CONCEPTOS BÁSICOS.
Definición de mínimo local y global
Representación a lo largo de una dirección de f.
Concepto de dirección de descenso. f. Dif.
CONDICIONES DE OPTIMALIDAD
Necesarias de 1er orden.
Funciones convexas dif. Propiedades básicas.
Funciones cuadráticas y funciones 2-dif.
Necesarias y suficientes de 2º orden
MÉTODO DEL GRADIENTE Y EXPLORACIÓN LINEAL.
MIOPD. stadística
FIB
I.O.E.
UPC
43
PROBLEMA DE OPTIMIZACI´
ON NO LINEAL SIN RESTRICIONES
M in x∈IRn f (x)
f : IRn → IR, f diferenciable
∇f (x) =
∂f
∂x1
..
∂f
∂xn (x)
Curvas de nivel de
44
CAPÍTULO 1. MODELOS DE TIEMPO DE VIDA
Definici´
on de m´
ınimo local x∗ de f .
∃δ0 t.q. ∀x, x∗ − x2 ≤ δ, δ < δ0:
f (x) ≥ f (x∗)
Definici´
on de m´
ınimo local estricto x∗ de f .
∃δ0 t.q. ∀x = x∗, x∗ − x2 ≤ δ, 0 < δ < δ0:
f (x) > f (x∗)
Definici´
on de m´
ınimo global x∗ de f .
∀x ∈ IRn, f (x) ≥ f (x∗)
Definici´
on de m´
ınimo global estricto x∗ de f .
∀x ∈ IRn, x = x∗, f (x) > f (x∗)
h(α)
x2
x
z=f(x1,x2)
d
x1
α
46
CAPÍTULO 1. MODELOS DE TIEMPO DE VIDA
h(α) = f (x + αd) es derivable y
o(α)
h(α) = h(0) + h (0)α + o(α) con im α→0+
=0
α
Por la regla de la cadena: h(0) = d∇f (x):
f (x + αd) = f (x) + α · d∇f (x) + o(α)
Direcci´
on d de descenso (d.d.) para f en x
∃α0 > 0, t.q. ∀ 0 < α < α0, es f (x + αd) < f (x).
Si f es diferenciable en x:
(a) d es d.d. en x ⇒ d∇f (x) ≤ 0.
(b) d es d.d. en x ⇐ d∇f (x) < 0.
Si ∇f (x) = 0 entonces d = −∇f (x) es d.d. en x para f :
d∇f (x) = −∇f (x)∇f (x) = − ∇f (x)22 < 0
(punto estacionario)
<
estrict. convexa
x1
x2
f(x,y)=5x2+10y
convexa
0
α
COMPORTAMIENTO DEL MÉTODO DEL GRADIENTE
(Exploración Lineal exacta)
f (x ) = x Qx − b x
T
x0
T
x2
x*
x1
E (xk +1) ( A− a )2
,
≤
E (xk ) ( A+ a )2
E (xk ) = (xk − x
) Q(xk − x* )
* T
( h'(0) < 0 )
h(α)
h(α)
α
1ª Regla
α
2ª Regla
τ2
0
1-τ
T
1
0
Determinar
intervalo de
incertidumbre
0
1-τ
τ
1
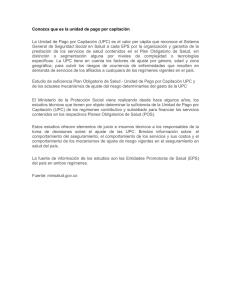
Ejemplo: P.N.L. sin restricciones
Exeini # Carga los vectores t, y
n=5
x0ini
# Carga la solución inicial en x0
[x,OPTIONS,F,J]=leastsq('fexe',x0,OPTIONS,'gexe',t,y,n)
t1=0:0.1:8.0
y1=x(1)*exp(x(2)*t1)
plot(t,n1,'x',t1,y1)
'fexe.m'
function f = FUN(x,t,y,n)
for i=1:n
f(i) = 0.5*(x(1)*exp(x(2)*t(i)) - y(i) );
end
'gexe.m'
function gf = GRADFUN(x, t, y,n)
for i = 1:n
gf(1,i) = 0.5*exp(x(2)*t(i));
gf(2,i) = 0.5*t(i)*x(1)*exp(x(2)*t(i));
end
Min
y
y=2.51exp(0.27t)
t
tema 2.e
OBJETIVO:
Estudiar las
condiciones que
verifican los óptimos
locales de (P)
Notación:
MIOPD. FIB
UPC
CONDICIONES SUFICIENTES DE K-K-T
MIOPD. FIB
UPC
MODELO DE EQUILIBRIO DE MERCADOS
DEMANDA CONSTANTE (INELASTICA)
tij
si
d1
1
Transporte
0
d2
d3
1
d1
2
d2
Demanda
2
Oferta
3
d3
( Pero puede existir zj > 0 !! )
PROGRAMACIÓN NO LINEAL CON RESTRICCIONES
• CONDICIONES DE KARUSH-KUHN-TUCKER.
Concepto de cono normal del conjunto factible.
Condiciones necesarias de 1er orden y regularidad.
Caso de problema convexo. Condiciones suficientes.
Lagrangiano del problema. Ejemplos.
Método de conjuntos activos. Ejemplos.
• MÉTODO DEL GRADIENTE REDUCIDO.
Caso de restricciones lineales.
Variables básicas y no básicas.
Algoritmo del gradiente reducido.
MIOPD.
I.O.E. deFIB
Estadística
UPC
(punto estacionario)
OBJETIVO:
Estudiar las
condiciones que
verifican los óptimos
locales de (P)
Notación:
MIOPD.
I.O.E. FIB
Diplomatura de
UPC
CONCEPTO DE CONO NORMAL A UN
CONJUNTO FACTIBLE
T
uT(Ax-b)=
}
*
<
Índices de las restricciones activas:
MIOPD.
I.O.E. deFIB
Estadística
UPC
CONDICIONES NECESARIAS DE K-K-T
Regularidad en x* :
de pleno rango
MIOPD.
FIB
I.O.E.
Diplomatura
de
UPC
y
x
x
*
CONDICIONES SUFICIENTES DE K-K-T
MIOPD.
I.O.E. FIB
de Estadística
UPC
62
CAPÍTULO 1. MODELOS DE TIEMPO DE VIDA
CONDICIONES DE 1er ORDEN EN FUNCI´
ON DEL LAGRANGIANO
M in f (x)
Para el problema: s.a : h(x) = 0 v
g(x) ≥ 0 u
Se define el Lagrangiano L(x, v, u) = f (x) − v h(x) − ug(x)
De forma que las condiciones de 1er orden se expresan:
∂g
∇xL(x, v, u) = ∇f (x) −
∂x
∇v L(x, v, u) = h(x) = 0
∇uL(x, v, u) = g(x) ≥ 0
ug(x) = 0, u ≥ 0
.
∂h
u−
v=0
∂x
2
1
Necesidad de las condiciones de regularidad
MIOPD. FIB
Diplomatura
de Estadística
UPC
Necesidad de las condiciones de regularidad
En el óptimo se verifica:
También en cualquier otro
punto; p.ej:
(!!!)
MODELO DE EQUILIBRIO DE MERCADOS
DEMANDA CONSTANTE (INELASTICA)
tij
si
d1
1
Transporte
0
d2
d3
1
d1
2
d2
Demanda
2
Oferta
3
d3
Sesión de Problemas
( Pero puede existir zj > 0 !! )
I.O.D. Diplomatura de Estadística
I.O.E.
UPC
x2
x1
x2
x1
Cambio
de base.
,
PRESENTACIÓN Y ANÁLISIS DE MODELOS EN P.N.L.
Semana 13.
• Sesión de teoría.
Problemas de transporte.
Problemas con demanda estocástica.
Equilibrio de mercados.
Análisis mediante las
condiciones de KKT (Práctica 6)
MIOPD.Diplomatura
FIB
I.O.E.
de
UPC
y
x
x
*
CONDICIONES SUFICIENTES DE K-K-T
MIOPD.
FIB
I.O.E.
de Estadística
Tema 2.e
UPC
MODELO DE EQUILIBRIO DE MERCADOS
DEMANDA CONSTANTE (INELASTICA)
tij
si
d1
1
Transporte
0
d2
d3
1
d1
2
d2
Demanda
2
Oferta
3
d3
MODELO DE EQUILIBRIO DE MERCADOS
t1j >0, t2j>0
t2j>0
DEMANDA
CONSTANTE
(INELASTICA)
t1j
1
dj
0
j
dj
2
t2j
MIOPD.
FIB
I.O.E.
Diplomatura
de
UPC
MIOPD.
I.O.E. FIB
de Estadística
UPC
0
0
PRÁCTICA 6
d = Cota superior de la demanda
p(d)
p(d) = p(d - δ ) = q(δ )
q(δ )
δ
d
d
d
Precio = p(demanda)
δ1
si
d1
0
d2
d3
tij
1
d1
1
δ2
2
d2
Exceso de demanda
Demanda absorbida por
el mercado
DEMANDA ELÁSTICA
2
δ3
MIOPD.
FIB
I.O.E.
Diplomatura
de
d = d +δ
3
d3
UPC
δ1
si
d1
0
d2
d3
tij
1
d1
1
δ2
2
d2
2
δ3
3
d3
set FACT;
set MERC;
set ARCTR within (FACT cross MERC);
set ORIGEN;
set ARC_FACT within (ORIGEN cross FACT);
δ1
set ARC_EXC within (ORIGEN cross MERC);
param CTRANS {(i,j) in ARCTR} >=0;
param a {j in MERC}>=0;
si
param b {j in MERC};
1
d1
param dmax {j in MERC}>0;
δ2
param alfa {i in FACT}>0;
d2
0
param beta {i in FACT};
d3
let dtotal:= sum {j in MERC} dmax[j];
node OR {l in ORIGEN} net_out = dtotal;
node P {i in FACT};
node MR {j in MERC} net_in = dmax[j];
arc fict {(l,j) in ARC_EXC} >= 0,
from OR[l], to MR[j];
arc xij {(i,j) in ARCTR} >= 0,
from P[i], to MR[j];
arc si {(i,j) in ARC_FACT} >=0,
from OR[i], to P[j];
tij
1
2
d1
d2
2
δ3
3
d3
minimize F:
sum{(i,j) in ARC_FACT} alfa[j]*si[j]+0,5*beta[j]*si[j]^2 +
sum{(p,q) in ARCTR} CTRANS[p,q]*xij[p,q]+
sum{(r,s) in ARC_EXC} a[s]*fict[s] + 0,5*b[s]*fict[s]^2;
δ1
si
d1
d3
1
1
δ2
0
d2
tij
d1
2
d2
2
δ3
π(s )=α+βs
s
3
d3
q(δ )=a+bδ
δ
set FACT:= P1 P2;
set MERC:= M1 M2 M3;
set ARCTR:= (P1,M1) (P1,M2) (P1,M3) (P2,M1) (P2,M2)
(P2,M3);
set ORIGEN:= O;
set ARC_FACT:= (O,P1) (O,P2);
set ARC_EXC:= (O,M1) (O,M2) (O,M3);
param CTRANS:= P1 M1 1 P1 M2 2 P1 M3 1.5
P2 M1 3 P2 M2 2 P2 M3 2.5;
param a:=
M1 10 M2 12 M3 9;
param b:=
M1 3
M2 2
M3 4;
δ1
param dmax:= M1 200 M2 200 M3 200;
d1
tij
param alfa:= P1 600 P2 600;
1
param beta:= P1 -0.5 P2 -0.5;
si
1
d1
d2
δ2
d2
0
2
d3
2
d3
δ3
3
δ1
Precio en M2; no se vende
Precio en M3
t
ij
15,91
Precio en M1
si
d1
0
d2
d3
1
d1
1
δ2
2
2
δ3
d2
61,55
3
d3
 0
0