Part1 - Portal de porticos
Anuncio

República Bolivariana de Venezuela
Universidad de Los Andes
Facultad de Ingeniería
Doctorado en Ciencias Aplicadas
EVALUACIÓN DE LA SEGURIDAD ESTRUCTURAL
Contribuciones a la Teoría del Daño Concentrado, a la Mecánica
Computacional de la Fractura y a la Teoría de Localización
TOMO I
María Eugenia Marante Garrido
Mérida, Octubre 2004
República Bolivariana de Venezuela
Universidad de Los Andes
Facultad de Ingeniería
Doctorado en Ciencias Aplicadas
EVALUACIÓN DE LA SEGURIDAD ESTRUCTURAL
Contribuciones a la Teoría del Daño Concentrado, a la Mecánica
Computacional de la Fractura y a la Teoría de Localización
Por:
María Eugenia Marante Garrido
Tesis presentada como requisito parcial para la obtención del
Doctorado en Ciencias Aplicadas
Tutor:
Dr. Julio Flórez-López
Mérida, Octubre 2004
Indice general
Agradecimientos…………………………………………………………………...………
iii
Indice de figuras……………………………………………………………………………
xiv
Indice de tablas……………………………………………………………………………. xxiv
PARTE I
Contribución a la Teoría del Daño Concentrado
Capítulo I-1: Teoría de elasticidad
I-1.1. Notación Indicial y tensores de orden n…………………………………………..
9
Sistemas…………………………………………………………………………..
10
Convención para la sumatoria……………………………………………………….
10
Notación para la diferenciación…………………………………………………….
11
Tensores de orden n………………………………………………………………...
12
I-1.2. Aspectos fundamentales de Mecánica de Sólidos…………..…………………....
12
Análisis de Esfuerzos……………………………………………………………….
12
Definición de Esfuerzo………………………………………………………...
12
Estado de esfuerzos en un punto……………………………………………….
13
Tensor de esfuerzos en notación matricial……………………………………..
15
Ecuaciones de equilibrio……………………………………………………….
15
Condiciones de contorno………………………………………………………
17
Esfuerzos Principales…………………………………………………………..
18
Análisis de deformación……………………………………………………………
19
Definición de Deformación…………………………………………………….
19
iv
Tensor de deformación en notación matricial………………………………….
21
Compatibilidad de las deformaciones………………………………………….
22
Relaciones esfuerzo-deformación……………………………………………...…...
22
Ortotropía y planos de simetría elástica………………………………………..
25
Estado de esfuerzos planos……………………………………………………...….
27
Estado de deformaciones planas generalizadas en elasticidad anisótropa…..……..
28
Coordenadas polares……………...………………………………………………...
30
Componentes de esfuerzo en coordenadas cilíndricas polares………………...
30
Ecuaciones de equilibrio en términos de coordenadas cilíndricas polares…….
30
Relaciones desplazamiento-deformación………………………………………
31
Ecuaciones de Compatibilidad…………………………………………………
32
Funciones de esfuerzos……………………………………………………………...
32
La Función de Esfuerzos de Airy………………………………………………
32
Vector de funciones de esfuerzo……………………………………………….
34
Función de esfuerzos en variable compleja……………………………………
34
I-1.3. Principio de los Trabajos Virtuales o de las Potencias Virtuales……………….
37
Capítulo I-2: Mecánica de la fractura frágil
I-2.1. Balance de Energía de Griffith……………………………………………………
38
I-2.2. Factores de Intensidad de Esfuerzos……………………………………………...
40
Análisis de esfuerzos en una grieta………………………………………………….
40
Factores de intensidad de esfuerzos…………………………………………………
41
I-2.3. Relación entre K y el comportamiento global……………………………………
42
v
Capítulo I-3: Método de los elementos de contorno
I-3.1. Soluciones Fundamentales………………………………………………………...
46
I-3.2. Formulación de la integral de contorno…………………………………………..
51
Identidad de Somigliana……………………………………………………………
52
Puntos del contorno…………………………………………………………………
53
I-3.3. Método de los Elementos de Contorno……………………………………………
54
Transformación de coordenadas……………………………………………………
59
Sistema de ecuaciones………………………………………………………………
60
Puntos internos……………………………………………………………………...
61
Capítulo I-4: Teoría de plasticidad
I-4.1. Comportamiento uniaxial de sólidos elastoplásticos……………………………..
62
Dominio Elástico…………………………………………………………………...
63
Efecto Baushinger…………………………………………………………………..
63
Idealizaciones de la curva esfuerzo-deformación…………………………………..
64
Modelo Elastoplástico perfecto………………………………………………….
65
Modelo Elastoplástico perfecto con endurecimiento cinemático lineal………...
66
Modelo Elastoplástico perfecto con endurecimiento isótropo…………………..
68
I-4.2. Vigas elastoplásticas y rótulas plásticas…………………………………………..
69
Rótula Plástica……………………………………………………………………...
73
Efecto de la carga axial……………………………………………………………..
76
I-4.3. Sólidos tridimensionales elastoplásticos…………………………………………..
81
Modelos para metales………………………………………………………………
82
Criterio de Tresca………………………………………………………………..
83
vi
Criterio de Von Mises o de la Energía máxima de distorsión…………………..
85
Endurecimientos Cinemático e Isótropo…………………………………………….
88
Ablandamiento por deformación……………………………………………………
90
Modelos para rocas y suelos………………………………………………………...
90
Criterio de Mohr Coulomb………………………………………………………
90
Criterio de Drucker-Prager……………………………………………………...
93
Modelos No Estándar………………………………………………………………..
94
Capítulo I-5: Teoría de pórticos planos elastoplásticos
I-5.1. Cinemática de pórticos planos…………………………………………………….
96
Desplazamientos generalizados…………………………………………………….
96
Desplazamientos restringidos………………………………………………………
97
Deformaciones generalizadas………………………………………………………
98
Ecuaciones cinemáticas…………………………………………………………….
98
I-5.2. Dinámica de pórticos planos……………………………………………………… 101
Esfuerzos generalizados……………………………………………………………. 102
Fuerzas externas sobre los nudos…………………………………………………... 102
Fuerzas de inercia………………………………………………………………….. 103
Ecuación de equilibrio dinámico…………………………………...……………… 104
I-5.3. Leyes de Comportamiento de pórticos elásticos planos………………………… 106
I-5.4. Leyes de Comportamiento de pórticos elastoplásticos planos………………….. 106
Capítulo I-6: Teoría del daño continuo y concentrado
I-6.1. Definición de la variable de daño continuo y esfuerzo equivalente…………….. 111
vii
I-6.2. Hipótesis de equivalencia en deformación y leyes de comportamiento………
113
I-6.3. Teoría del daño concentrado……………………………………………………
115
Daño en una rótula plástica………………………………………………………
116
Matriz de flexibilidad en un miembro elastoplástico con daño………………….
117
Función de fluencia de las rótulas plásticas con daño…………………………...
119
Leyes de evolución del daño de las rótulas plásticas…………………………….
120
Función de resistencia al agrietamiento………………………………………….
121
Influencia de la carga axial………………………………………………………
123
Condiciones de admisibilidad termodinámicas………………………………….
125
Daño unilateral en pórticos planos de concreto armado…………………………
126
Fatiga de bajo ciclaje en pórticos planos de concreto armado…………………...
129
Capítulo I-7: Teoría de localización
I-7.1. Localización en el caso uniaxial…………………………………………………... 131
I-7.2. Criterio de localización de Rudnicki y Rice……………………………………… 135
PARTE II
Contribución a la Teoría de Daño Concentrado
Capítulo II-1. Portal de pórticos e implementación numérica
II-1.1. Descripción del portal……………………………………………………………. 141
Enlaces del portal………………………………………………………………….. 141
Programa de elementos finitos…………………………………………………...
147
Resolución numérica de la estructura y algoritmo de dicretización del tiempo... 148
viii
Implementación numérica del problema global………………………………… 150
Implementación numérica del problema local………………………………….. 151
II-1.2. Ejemplos numéricos……………………………………………………………… 163
Capítulo II-2. Extensión del modelo de daño concentrado al caso tridimensional
II-2.1. Cinemática de pórticos tridimensionales………………………………………... 170
Desplazamientos generalizados….………………………...……………………...
170
Desplazamientos restringidos………………………….………………………….. 172
Deformaciones generalizadas……….…………………………………………….. 172
Ecuaciones cinemáticas…………….……………………………………………… 173
II-2.2. Dinámica de pórticos planos……………………………………………………... 174
Esfuerzos generalizados…………….……………………………………………... 175
Fuerzas externas sobre los nudos……………….…………………………………. 175
Fuerzas de inercia….……………………………………………………………… 176
Ecuación de equilibrio dinámico……….…………………………………………. 178
II-2.3. Leyes de Comportamiento de pórticos elásticos tridimensionales…………….. 179
II-2.4. Leyes de Comportamiento de pórticos elastoplásticos tridimensionales……… 180
II-2.5. Leyes de Comportamiento de pórticos elastoplásticos con daño
tridimensionales………………………………………………………………………….. 184
Ley de estado………………………………………….…………………………... 184
Leyes de evolución del daño………………………………………………………
186
Leyes de evolución de las deformaciones plásticas……………………………….. 190
Parámetros del modelo…………………………………………………………….. 191
II-2.6. Análisis de estructuras tridimensionales de concreto armado………………… 192
ix
Datos del problema………………………………………………………………... 192
Incógnitas del problema…………………………………………………………… 192
Ecuaciones………………………………………………………………………… 193
Resolución numérica………………………………………………………………. 196
Problema global………………………………………………………………… 196
Problema local………………………………………………………………….. 197
Implementación numérica…………………………………………………………. 200
II-2.7. Ejemplos numéricos……………………………………………………………… 201
Simulaciones numéricas de ensayos experimentales realizados por
Bousias et al. (1995)………………………………………………………………. 201
Simulaciones numéricas de ensayo experimental realizado por Oliva
y Clough (1987)………………………………………………………………….
211
Conclusiones……………………………………………………………………………… 215
PARTE III
Contribución a la mecánica computacional de la fractura
Capítulo III-1: Formulación directa del método de los elementos de contorno en
variables complejas
III-1.1. Soluciones fundamentales………………………………………………………. 218
III-1.2. Interpretación física de la Identidad de Somigliana…………………………... 222
III-1.3. Interpolación…………………………………………………………………….. 224
III-1.4. Desplazamiento y Esfuerzo……………………………………………………... 225
III-1.5. Métodos de Elementos de Contorno en Desplazamientos y Tracciones……... 227
x
Método de Elementos de Contorno en Desplazamientos……...………………….. 228
Método de Elementos de Contorno en Tracciones…………………...…………… 229
Capítulo III-2: Modelado de grietas y resultados numéricos
III-2.1. Elemento convencional de grieta (ECG)……………………………………….. 231
III-2.2. Elemento singular de grieta (ESG)……………………………………………... 232
III-2.3. Elemento singular de vértice de grieta (EVG) ………………………………... 235
III-2.4. Simulaciones y resultados numéricos…………………………………………... 237
Conclusiones……………………………………………………………………………… 249
PARTE IV
Contribución a la Teoría de Localización
Capítulo IV-1 Demostración alternativa del criterio de localización en medios
continuos
IV-1.1. Modelo de daño isótropo………………………………………………………... 252
Análisis clásico de localización…..……………………………………………….. 253
Análisis de localización en términos de la velocidad de daño bajo la condición
carga/carga…………………………………………..…………………………….. 255
Análisis de localización bajo la condición carga/descarga……..…………………. 256
Ejemplos………………………………..…………………………………………. 257
IV-1.2. Modelo de elastoplasticidad con ablandamiento y dominios elásticos
suavizados………………………………………………………………………………… 261
Análisis clásico de localización……………………………………..…………….. 262
Análisis de localización en términos del salto del multiplicador plástico bajo
la condición carga/carga……...…………………………………………………… 264
xi
Análisis de localización en términos del salto del multiplicador plástico bajo
la condición carga/descarga………………………...……………………………... 265
Ejemplo…………………………………………………..………………………... 267
Capítulo IV-2 Localización en estructuras aporticadas
IV-2.1. Modos de localización en una estructura aporticada………………………….. 270
IV-2.2. Criterios de localización en el miembro………………………………………... 271
Rótula plástica con ablandamiento sometida a flexión y cargas axiales……..…… 271
Modelo general……………………………..…………………………………. 271
Rótula plástica con ablandamiento lineal y sin carga axial……………..…….. 271
Rótula plástica con ablandamiento sinusoidal y sin carga axial……….……...
272
Rótula plástica con cargas axiales y ablandamiento lineal en flexión…….…..
272
Miembros de pórticos elastoplásticos con rótulas con ablandamiento……………. 274
Análisis de unicidad de la respuesta del miembro por el método de Nguyen
y Bui………..……………………………………………………………………… 277
Localización en el caso general………………..……………………………… 277
Localización en un miembro de pórtico con ablandamiento lineal y sin
carga axial……..………………………………………………………………. 279
Localización en el caso de ablandamiento no lineal sin acortamiento
inelástico………………………………………………………………………... 280
Localización en un miembro de pórtico con cargas axiales y ablandamiento
lineal en flexión…………………………………………………………………. 282
IV-2.3. Localización en el nudo: análisis de un caso particular……………………….. 283
Ecuaciones de equilibrio……………………………………………….………….. 283
Análisis de localización en un pórtico simple……………………………………... 284
Localización en un nudo y localización en un miembro de pórtico………………. 287
xii
IV-2.4. Implicaciones numéricas del criterio de localización en el miembro………… 288
Conclusiones……………………………………………………………………………… 290
Conclusiones generales…………………………………………………………………... 291
Anexos…………………………………………………………………………………….. 293
Anexo A…………………………………….……………………………………... 294
Anexo B……………………………………….…………………………………... 300
xiii
Indice de figuras
PARTE I
Capítulo I-1
Conceptos Básicos
Teoría de elasticidad
I-1.1.
Esfuerzos en un punto……………………………………..….…….…
13
I-1.2.
Convención de signos: componentes de esfuerzos, fuerzas de
superficie y fuerzas de volumen referidas a las coordenadas
cartesianas x1, x2 y x3……………………………………...…….….…
14
I-1.3.
Componentes de esfuerzo en la dirección x1………………………..…
16
I-1.4.
Definición geométrica del dominio y contorno de un cuerpo…………
16
I-1.5.
Diagrama de esfuerzos en dos dimensiones……………………..…….
18
I-1.6.
Deformaciones resultantes de esfuerzos unidireccionales (a) normales
y (b) cortantes que actúan en un elemento diferencial de material
elástico………………………………………………….............……
20
(a) Plano de simetría material; (b) Plano que no corresponde a una
simetría material……………………………..………………………...
26
I-1.8.
Material Ortótropo………………………..……………………………
27
I-1.9.
Ilustración de estado de esfuerzos planos….……….………………….
28
I-1.10.
Componentes de esfuerzo en coordenadas cilíndricas polares en tres
dimensiones………………………………………….........…………...
31
I-1.7.
Capítulo I-2
I-2.1.
Mecánica de la fractura frágil
Hueco elíptico en una placa infinita sometida a esfuerzos de tensión
uniforme remotos……………………………………………………...
39
I-2.2.
Definición de los ejes coordenados en el vértice de una grieta ……….
41
I-2.3.
Modos de carga en una grieta………………………………………….
41
I-2.4.
Grieta de borde en una placa semi-infinita sujeta a esfuerzos de
tensión remotos……………………………………….………………..
43
xiv
I-2.5.
Capítulo I-3
Grieta central en placa infinita para el caso general donde el esfuerzo
principal no es perpendicular al plano de la grieta…………………….
44
Método de los elementos de contorno
I-3.1.
Componentes del vector de distancia r………………………………...
50
I-3.2.
Aumento del contorno para el análisis de puntos de superficie en el
caso (a) tridimensional y (b) bidimensional…………………………...
54
55
I-3.3.
Tipos de elementos de contorno en 2D:
(a) Elementos constantes, (b) Elementos lineales, (c) Elementos
cuadráticos
I-3.4.
Tipos de elementos de contorno en 3D:
(a) Elementos constantes, (b) Elementos lineales, (c) Elementos
cuadráticos…………………………………………………...................
56
Interpretación geométrica de las componentes de las soluciones
fundamentales. (a) Definición geométrica, (b) Componentes de
desplazamiento de la solución fundamental, (c) Componentes de
tracción de la solución fundamental…………………………………...
58
Sistema de ejes coordenados para un elemento de superficie curvo…..
59
I-3.5.
I-3.6.
Capítulo I-4
I-4.1.
Teoría de plasticidad
Curva esfuerzo-deformación de metales con efectos de descarga y
cargas reversibles…………………………….………………………...
64
Curva esfuerzo-deformación obtenida con el modelo elastoplástico
perfecto en el caso (a) monotónico, (b) cíclico.………………………..
66
I-4.3.
Centro del dominio elástico……………………………………………
67
I-4.4.
Curva esfuerzo-deformación obtenida con el modelo elastoplástico
perfecto considerando endurecimiento cinemático en el caso cíclico
(Modelo de Prager)…………………………………………………….
68
Curva esfuerzo-deformación obtenida con el modelo elastoplástico
perfecto considerando endurecimiento isótropo no lineal en el caso
cíclico………………………………………….……………………....
69
I-4.2.
I-4.5.
xv
I-4.6.
Viga simplemente apoyada sometida a una carga concentrada en el
centro…………………………………………………..……………....
70
Evolución de los esfuerzos y deformaciones en la sección central de la
viga (a) m<my ; (b) m = my ; (c) my < m < mp ; (c) m = mp……….…..
70
I-4.8.
Curva momento-curvatura en la sección central de la viga……………
71
I-4.9.
Distribución de momentos, zona plástica y curvaturas a lo largo de la
viga………………………………………………………………..…....
72
I-4.10.
Curva aproximada momento-curvatura………………………………..
73
I-4.11.
Distribución de momentos, zona plástica y curvaturas aproximadas….
74
I-4.12.
Relación momento-rotación en una rótula plástica perfecta…………...
75
I-4.13.
Interpretación de la rotación plástica……………………………..……
75
I-4.14.
Comportamiento de una rótula plástica con endurecimiento
cinemático lineal……………………………………………………….
76
Distribución de esfuerzos bajo la acción combinada de momento
flector y fuerza axial de compresión…………………………………...
77
Distribución de esfuerzos en una sección rectangular totalmente
plastificada……………………………………………………….…….
78
Representación de las deformaciones plásticas en una rótula sometida
a flexión y carga axial………………………………………………….
79
I-4.18.
Representación de la Ley de Normalidad……………………………...
81
I-4.19.
Estado general de esfuerzos en un elemento representativo de
volumen en sólido tridimensional
82
I-4.20.
Comparación de los Criterios de Rankine, Tresca y Von Mises con
datos de algunos ensayos. (Popov (1997))……………………………..
83
Superficies de fluencia de Tresca y Von Mises para el estado de
esfuerzo tridimensional. (Popov (1997))………………………………
85
Resolución de esfuerzos principales en esfuerzos dilatacionales y
distorsionales……………………………………………………..…….
87
Endurecimiento isótropo. (Lemaitre y Chaboche (1985))……………..
89
I-4.7.
I-4.15.
I-4.16.
I-4.17.
I-4.21.
I-4.22.
I-4.23.
xvi
I-4.24.
I-4.25.
I-4.26.
I-4.27.
I-4.28.
Capítulo I-5
I-5.1.
Movimiento de la superficie de falla en el espacio de esfuerzos a
tracción y compresión y el correspondiente diagrama esfuerzodeformación. (Lemaitre y Chaboche (1985))……………….………….
90
Criterio de Mohr-Coulomb (a) Diagrama de Mohr (b) En el espacio de
esfuerzos principales. (Halphen y Salençon (1987))………….……….
91
Criterio de falla de Mohr-Coulomb en el plano deviatórico de
ecuación σ I + σ II + σ III = 3P .(Halphen y Salençon (1987))……………….
92
Criterio de falla de Drucker-Prager en el espacio de esfuerzos
principales. (Halphen y Salençon (1987))……………………………..
94
Criterios de falla de Mohr-Coulomb y Drucker-Prager en el plano
deviatórico……………………………………………………………..
95
Teoría de pórticos planos elastoplásticos
Representación de un pórtico plano y desplazamientos generalizados
del nudo………………………………………………………………..
97
I-5.2.
Deformaciones generalizadas de un miembro de pórtico plano……….
99
I-5.3.
Deformaciones generalizadas del miembro i-j producidas por
incrementos diferenciales de los desplazamientos del nudo i………….
99
I-5.4.
Esfuerzos generalizados en un miembros de pórtico plano…………… 102
I-5.5.
Modelo de plasticidad concentrada de un miembro de pórtico plano…
Capítulo I-6
107
Teoría del daño continuo y concentrado
I-6.1.
Validez de la mecánica de la fractura frágil (Flórez-López (1999))…... 111
I-6.2.
Daño en un medio continuo…………………………………………… 112
I-6.3.
Esfuerzo efectivo………………………………………………………
I-6.4.
I-6.5.
Envolvente parabólica en un modelo de daño frágil…………………... 115
Representación del estado de daño por flexión en un miembro de
concreto armado mediante variables internas…………………………. 116
I-6.6.
Junta viga-columna para la identificación de la resistencia al
agrietamiento………………………………………………………….. 121
113
xvii
I-6.7.
Curva fuerza contra desplazamiento del ensayo de la probeta para la
identificación de la resistencia al agrietamiento………………………. 122
I-6.8.
Curva daño contra tasa de disipación de energía……………………… 123
I-6.9.
Representación del daño para momentos positivo y negativo………… 127
Capítulo I-7
Teoría de localización
I-7.1.
Ensayo de compresión triaxial en arena realizado en La Universidad
del Estado de Luisiana………………………………… …………….. 130
I-7.2.
Medio continuo unidimensional y discretización por elementos finitos
131
I-7.3.
Leyes de comportamiento y ecuación de equilibrio…………………...
132
I-7.4.
(a) Solución Homogénea; (b) solución localizada…………………….. 134
I-7.5.
Gráfico fuerza desplazamiento para el modelo de la figura I-7.2……... 134
I-7.6.
(a) Medio continuo sometido a solicitaciones,
(b) Superficie de
r
discontinuidad orientada según la normal n ………………………….. 136
I-7.7.
Equilibrio a través de la superficie de discontinuidad………………… 137
PARTE II
Capítulo II-1
Contribuiciones a la Teoría del Daño Concentrado
Portal de pórticos e implementación numérica
II-1.1.
Página principal del Portal de Pórticos………………………………... 141
II-1.2.
Pantalla de registro de usuario……………………………………….... 142
II-1.3.
Pantalla principal del preprocesador…………………………………... 142
II-1.4.
Pantalla de geometría de la estructura…………………………………
143
II-1.5.
Pantalla de Aceros de refuerzo………………………………………...
143
II-1.6.
Pantalla de características de los materiales…………………………...
144
II-1.7.
Pantalla de cargas actuantes sobre la estructura……………………….
144
xviii
II-1.8.
Gráfico del pórtico…………………………………………………….. 145
II-1.9.
Diagramas de interacción calculados en el preprocesador…………….
II-1.10.
Ventana de monitoreo de un análisis en el portal……………………... 147
II-1.11.
Postprocesador gráfico………………………………………………… 147
II-1.12.
Algoritmo de resolución numérica del problema……………………...
150
II-1.13.
Esquema general de la implementación de la resolución numérica…...
151
II-1.14.
Esquema general de la subrutina MDC………………………………..
152
II-1.15.
Subrutina cal_def1…………………………………………………….. 153
II-1.16.
Subrutina cal_prop…………………………………………………….. 154
II-1.17.
Subrutina esfuerzos……………………………………………………. 158
II-1.18.
Subrutina cal_residu…………………………………………………...
II-1.19.
Subrutina cal_jacob……………………………………………………. 160
II-1.20.
(a) Gráfica momento – curvatura de la viga en volado después de
Abrams (1987); (b) Simulación numérica…………………………….. 164
II-1.21.
Información para la descripción del comportamiento uniaxial de los
materiales: (a) concreto; (b) acero de refuerzo………………………... 164
II-1.22.
(a) Gráfica momento – curvatura de la viga en volado después de
Abrams (1987); (b) Simulación numérica después de modificar los
diagramas de interacción……………………………………………… 165
II-1.23.
(a) Diagramas de interacción usados en la simulación de la figura II1.20b; (b) Diagramas de interacción usados en la simulación de la
figura II-1.22b…………………………………………………………. 165
II-1.24.
Ensayo realizado en pórtico de concreto armado realizado por Vechio
y Emara (1992)…...…………………………………………………… 166
(a) Gráfica fuerza contra desplazamiento en el pórtico ensayado por
Vechio y Emara (1992); (b) Simulación numérica…………………… 166
II-1.25.
146
159
II-1.26.
Distribución de daño al final del ensayo………………………………. 167
II-1.27.
Pórtico de concreto armado de 10 niveles……………………………..
168
xix
II-1.28.
Distribución de daño al final del análisis con el sismo de diseño……... 169
II-1.29.
Distribución de daño al final del análisis con el sismo más severo…… 169
Capítulo II-2
Extensión del modelo de daño concentrado al caso tridimensional
II-2.1.
Representación de un pórtico espacial………………………………… 171
II-2.2.
Deformaciones generalizadas de un miembro de pórtico espacial……. 173
II-2.3.
Esfuerzos generalizados en un miembro de pórtico espacial………..… 175
II-2.4.
Modelo de plasticidad concentrada de un miembro de pórtico………..
II-2.5.
Superficie de interacción…………………………………………….… 182
II-2.6.
Ley de Normalidad en plasticidad………………………………….….. 183
II-2.7.
Representación del agrietamiento en un pórtico de concreto armado…
II-2.8.
Criterio de evolución del daño………………………………………… 188
II-2.9.
Detalle de refuerzo de los especimenes ensayados por Bousias et al.
(1995)…………………………………………………………….……. 202
II-2.10.
Resultados experimentales y simulación numérica del ensayo S0
realizado por Bousias et al. (1995)……………………………………. 204
II-2.11.
Resultados experimentales y simulación numérica del ensayo S1
realizado por Bousias et al. (1995)……………………………………. 205
II-2.12.
Resultados experimentales y simulación numérica del ensayo S2
realizado por Bousias et al. (1995)……………………………….……. 206
II-2.13.
Resultados experimentales y simulación numérica del ensayo S3
realizado por Bousias et al. (1995)………………………………….…. 207
II-2.14.
Resultados experimentales y simulación numérica del ensayo S4
realizado por Bousias et al. (1995)…………………………….………. 208
II-2.15.
Resultados experimentales y simulación numérica del ensayo S6
realizado por Bousias et al. (1995)…………………………….………. 209
II-2.16.
Resultados experimentales y simulación numérica del ensayo S9
realizado por Bousias et al. (1995)…………………………….………. 210
180
185
xx
II-2.17.
Estructura aporticada sometida a solicitaciones sísmicas por Oliva
(1980)…………………………………………………………….……. 211
II-2.18.
Detalles de las secciones transversales de los elementos del pórtico
mostrado en la figura II-2.17………………………………………….. 212
II-2.19.
Distribución del daño en el pórtico: (a) después del sismo de baja
intensidad; (b ) después del sismo severo……………………….…….. 213
II-2.20.
Desplazamientos primer piso: (a) longitudinal, ensayo; (b)
longitudinal, simulación; (c) transversal, ensayo; (d) transversal,
simulación……………………………………………………….…….. 214
II-2.21.
Comportamiento local de una columna del primer nivel: (a)
longitudinal, ensayo; (b) longitudinal, simulación; (c) transversal,
ensayo; (d) transversal, simulación……………………………………. 214
PARTE III
Capítulo III-1
Contribución a la Mecánica Computacional de la Fractura
Formulación directa del método de los elementos de contorno en
variables complejas
III-1.1.
Fuerza lineal F en ξ=η1 + iη2………………………………….………. 219
III-1.2.
Dislocación b en ξ…………………………………………….……….. 219
III-1.3.
(a) Fuerza dipolar; (b) Dislocación dipolar……………………………. 220
III-1.4.
Interpretación física de la Identidad de Somigliana…………………… 224
III-1.5.
Contorno poligonal aproximado………………………………………. 228
Capítulo III-2
Modelado de grietas y resultados numéricos
III-2.1.
Elemento Singular de Grieta (ESG)…………………………………… 232
III-2.2.
Elemento Singular de Vértice de Grieta (EVG)……………………….
III-2.3.
Distribuciones simétricas de elementos en una grieta interna………… 238
III-2.4.
Distribuciones (a) simétricas y (b) asimétricas de elementos en una
grieta de borde…………………………………………………….…… 239
235
xxi
III-2.5.
Dos grietas colineales bajo tensión uniaxial remota…………………... 241
III-2.6.
Tres grietas colineales bajo tensión uniaxial remota…………………..
III-2.7.
Dos grietas paralelas alineadas bajo tensión uniaxial remota…………. 243
III-2.8.
Tres grietas paralelas alineadas bajo tensión uniaxial remota………… 244
III-2.9.
Dos grietas inclinadas bajo tensión uniaxial remota…………………... 245
III-2.10.
Dos grietas de borde paralelas en un semi-plano bajo tensión uniaxial
remota………………………………………………………………..… 246
III-2.11.
Grieta de borde desviada en un semi-plano bajo tensión uniaxial
remota………………………………………………………………..… 247
III-2.12.
Doble grietas de borde en una placa cuadrada………………………… 248
PARTE IV
Capítulo IV-1
241
Contribución a la Teoría de Localización
Demostración alternativa del criterio de localización en medios
continuos
IV-1.1
Placa sometida a un estado de esfuerzos planos………………………. 258
IV-1.2.
Ley de comportamiento del modelo de daño isótropo definido según
(IV-1.1), (IV-1.3) y (IV-1.27)…………………………………………. 259
IV-1.3.
Condición de localización para la placa de la figura IV-1.1 con φ=0,
ν = 0.25 y α 0.001…………….……………………………………….. 260
IV-1.4.
Condición de localización para la placa de la figura IV-1.1 con φ = 30,
ν = 0.25 y α = 0.001…………………………………………...……… 260
IV-1.5.
Ley de comportamiento para el modelo elastoplástico………………... 267
Capítulo IV-2
IV-2.1
Localización en estructuras aporticadas
(a) Localización en el nudo; (b) Localización en un miembro de
pórtico………………………………………………………………… 270
xxii
IV-2.2.
(a) Rótula plástica con ablandamiento lineal en rotaciones plásticas;
(b) Rótula plástica con ablandamiento no lineal………………………. 272
IV-2.3.
(a) Función de fluencia en el espacio de esfuerzos generalizados (α =
2/2 y β = 2); (b) Momento en función de la rotación plástica para
diferentes valores de fuerza axial; (c) Fuerza axial en función de la
elongación plástica…………………………………………………….. 273
IV-2.4.
(a) Desplazamientos generalizados de un miembro de pórtico; (b) 274
Deformaciones generalizadas; (c) Esfuerzos generalizados
IV-2.5.
Modelo de plasticidad concentrada de un miembro de pórtico plano.… 275
IV-2.6
Dominio de localización sin fuerzas axiales…………………………... 281
IV-2.7.
Dominio de localización para endurecimiento sinusoidal…………….. 281
IV-2.8.
Variación del factor k(n)………………………………………………. 283
IV-2.9.
Pórtico simple usado como ejemplo para el estudio del
comportamiento de una junta perteneciente a una estructura…………. 284
IV-2.10.
Leyes constitutivas para el pórtico de dos elementos…………………. 286
IV-2.11
(a) Soluciones bifurcada y fundamental; (b) Localización en la rótula
A............................................................................................................. 287
ANEXOS
ANEXO B
B-1.
Fuerza resultante a lo largo de una línea………………………………. 300
xxiii
Indice de tablas
PARTE II
Capítulo II-1
Contribuiciones a la Teoría del Daño Concentrado
Portal de pórticos e implementación numérica
II-1.1.
Datos para la simulación presentada en la figura II-1.20………….….
164
II-1.2.
Datos para la simulación presentada en la figura II-1.25b y II-1.26.…
167
PARTE III
Capítulo III-2
Contribución a la Mecánica Computacional de la Fractura
Modelado de grietas y resultados numéricos
III-2.1.
Efecto del tamaño del elemento de vértice de grieta en el factor de
intensidad de esfuerzos KI/KIanalitico de una grieta interna (figura II2.3) en una placa infinita de material isótropo sometida a tensión
uniaxial…………………………………………………………….…. 239
III-2.2.
Efecto del tamaño del elemento de vértice de grieta en los factores de
intensidad de esfuerzos KI/KIanalitico en una grieta de borde de una
placa semi-infinita de material isótropo sometida a tensión uniaxial… 239
III-2.3.
Factores de intensidad de esfuerzos para las dos grietas colineales de
la figura II-2.5 con 2a/d = 0.9, en un cuerpo infinito bajo tensión σ..... 242
III-2.4.
Factores de intensidad de esfuerzos para las tres grietas colineales de
la figura II-2.6 con 2a/d = 0.9, en un cuerpo infinito bajo tensión
σ……………………………………………………………….……... 242
III-2.5.
Factores de intensidad de esfuerzos para las dos grietas alineadas
paralelas de la figura II-2.7 con 2a/d = 5.0, en un cuerpo infinito bajo
tensión σ……….……………………………………………………... 243
III-2.6.
Factores de intensidad de esfuerzos para las tres grietas alineadas
paralelas de la figura II-2.8 con 2a/d = 0.8, en un cuerpo infinito bajo
tensión σ………………………………………………………............ 244
III-2.7.
Factores de intensidad de esfuerzos para las dos grietas inclinadas de
la figura II-2.9 con α = 30º y 2a/d = 0.9, en un cuerpo infinito bajo
tensión σ……………………………………………………………... 245
xxiv
III-2.8.
Factores de intensidad de esfuerzos para las dos grietas paralelas de
borde de la figura II-2.10 en un cuerpo semi-infinito bajo tensión
σ……………………………………………………………………… 246
III-2.9.
Factores de intensidad de esfuerzos para la grieta desviada de la
figura II-2.11 con θ1 = 90º, θ2 = 45º y c2 = 1.0 en un cuerpo infinito
bajo tensión σ….………….…………………………………………... 247
III-2.10.
Factores de intensidad de esfuerzos para la doble grieta de borde en
la placa cuadrada de la figura II-2.12 con (H/W = 1) sometida a
tensión σ……………………………………………………………… 248
xxv
Introducción
El estudio de la seguridad estructural puede ser realizado mediante el análisis de
diversos aspectos que afectan la estabilidad de las estructuras. Entre estos aspectos se
encuentran: la acumulación de microdefectos en los materiales, la propagación de grietas
macroscópicas, la aceleración en el colapso debido al efecto de localización de deformaciones,
las inestabilidades geométricas como el pandeo en vigas, placas y sólidos tridimensionales, los
efectos de la fatiga mecánica, etc. Para el estudio de los aspectos antes mencionados se hace
uso de disciplinas tales como la teoría de elasticidad y plasticidad, la mecánica de la fractura,
la teoría del daño, la teoría de localización y la mecánica computacional, entre otras. En este
trabajo se hacen aportes a tres de los aspectos antes mencionados (la mecánica computacional
de la fractura, la teoría del daño y la teoría de la localización) según la presentación que se
describe a continuación.
En la primera parte, que está constituida por 7 capítulos, se incluyen conceptos básicos
de teoría de elasticidad, mecánica de la fractura frágil, método de los elementos de contorno,
teoría de plasticidad, teoría de pórticos elastoplásticos, teoría del daño continuo y concentrado
y finalmente de teoría de localización. En esta primera parte no se describen resultados
originales y sólo se incluye con la finalidad de establecer una notación y facilitar la
comprensión de los enfoques que se plantean en los siguientes capítulos.
La segunda parte, compuesta por dos capítulos, comprende el aporte al desarrollo de la
teoría de daño concentrado. Esta teoría ha sido desarrollada en la Universidad de los Andes
desde principios de los años 90 y ha sido utilizada para la simulación del comportamiento de
estructuras de acero estructural y de concreto armado sometidas a sobrecargas severas como
las que se pueden presentar durante los sismos. En el capítulo II-1 se presenta un prototipo
llamado Portal de Pórticos, constituido por un programa de elementos finitos no lineal
acoplado a Internet que puede resultar muy útil en la evaluación de las edificaciones existentes
o por construir. Este prototipo es el resultado de un trabajo multidisciplinario en el que han
participado ingenieros de sistemas, licenciados en matemática e ingenieros civiles. El sistema
consiste en un programa de elementos finitos dinámico no lineal basado en la Teoría del Daño
Concentrado especialmente diseñado para el portal. Esta teoría combina los métodos de la
mecánica de la fractura, de la teoría del daño continuo con el concepto de rótula plástica. De
1
esta manera se obtiene una teoría general de pórticos para el análisis de estructuras aporticadas
sometidas a sobrecargas severas. Para ello se tomó como punto de partida el modelo para
pórticos planos de concreto armado propuesto por Picón (1999) que considera la pérdida de
resistencia y rigidez que se produce como consecuencia del agrietamiento del concreto y de la
fluencia del acero de refuerzo, la influencia de la carga axial variable, secciones reforzadas
asimétricamente y el efecto de la fatiga de bajo ciclaje. En el marco de este trabajo se le
hicieron las modificaciones necesarias al modelo antes mencionado para su implementación
en el programa de elementos finitos.
Con la finalidad de obtener una representación más realista del comportamiento de las
estructuras, en el capítulo II-2 se presenta un modelo también basado en la Teoría del Daño
Concentrado. Cipollina et al. (1995), Bolzon (1996), Flórez-López (1998), Mazza (1998), y
Perera et al. (2000) han usado esta teoría en pórticos planos. En este trabajo se tomó el modelo
para pórticos planos propuesto en Perdomo et al. (1999) y se adaptó para el análisis de
estructuras tridimensionales. Adicionalmente se describe la implementación numérica del
modelo en un programa comercial de elementos finitos llamado ABAQUS y se presentan
simulaciones numéricas de ensayos experimentales encontrados en la literatura donde se
evidencia una adecuada representación del comportamiento de las estructuras tridimensionales
con el modelo propuesto.
En la tercera parte, conformada por los capítulos III-1 y III-2, se presentan
contribuciones a la mecánica computacional de la fractura. Para ello se desarrolla el método de
los elementos de contorno para el análisis de múltiples grietas curvilíneas en modo mixto de
fractura. El estudio es realizado en sólidos bidimensionales con anisotropía general. En un
estado de deformaciones planas generalizadas pueden estar acoplados tres modos de falla,
Modo I y Modo II en el plano y el Modo III fuera del plano. La mayoría de los estudios que
utilizan el Método de los Elementos de Contorno bidimensionales para el análisis de sólidos
anisótropos han considerado solo casos de deformaciones y esfuerzos planos desacoplados
(Snyder y Cruse (1975); Sollero y Aliabadi (1993), Denda (1999)). Denda (2001) y Denda y
Mattingly (2003) han considerado acoplamiento total de los tres modos.
Snyder y Cruse (1975) usan la función de Green para el modelado de la singularidad en
el vértice de una grieta simple en sólidos anisótropos y calculan analíticamente los factores de
intensidad de esfuerzos sin modelar la superficie de la grieta. Tan y Gao (1992) usan
2
elementos de vértice de grieta en tracción y desplazamiento a partir de los cuales se derivan
expresiones analíticas para los factores de intensidad de esfuerzos. Sollero y Aliabadi (1993)
usan un método de elementos de contorno dual y calculan los factores de intensidad de
esfuerzo con la integral – J. El método de dislocaciones dipolares de Denda (1999,2001)
adopta la integral de conservación desarrollada por Chen y Shield (1997) para calcular los
mismos. No obstante la excelente precisión de los factores de intensidad de esfuerzos
obtenidos con las integrales de conservación, es requerida la realización de un post-proceso lo
que implica una carga de trabajo importante en el caso de múltiples grietas. La propuesta de
función de Green no requiere el post-proceso debido a que usa expresiones analíticas para
calcular los factores de intensidad de esfuerzos; sin embargo, el método está limitado a
problemas de una sola grieta de trayectoria recta. En Denda y Mattingly (2003) se emplea la
propuesta de dislocaciones dipolares desarrollada por Denda (1999,2001). En esta propuesta
se interpola el desplazamiento de abertura de grieta de una fisura única de trayectoria recta con
la función de peso
a 2 − X 2 y polinomios de Chebychev, donde X es la coordenada local a lo
largo de la grieta de longitud media a. Con este procedimiento se obtiene una fórmula analítica
para los factores de intensidad de esfuerzos en términos de los coeficientes del polinomio de
desplazamiento de apertura de grieta (COD). Este elemento de grieta es llamado elemento
singular de grieta (ESG). En este caso no es requerido un post-proceso ya que se obtienen
fórmulas analíticas que calculan los factores de intensidad de esfuerzos como parte de la
solución. El ESG para sólidos isótropos ha sido desarrollado por Denda y Dong (1997).
Aunque con el ESG se pueden analizar múltiples grietas centrales de manera eficiente, no
permite el análisis de grietas de borde ni curvilíneas. Para extender la capacidad del ESG y
poder realizar el análisis de múltiples grietas curvilíneas, Denda y Dong (1997) propusieron un
elemento singular de vértice de grieta (EVG) para sólidos isótropos, el cual es un pequeño
ESG ubicado en cada vértice de la fisura.
El objetivo de esta parte del trabajo, es desarrollar un elemento singular de vértice de
grieta para sólidos con anisotropía general en dos dimensiones. El EVG es ubicado localmente
en cada vértice de grieta superpuesto a los ECG no singulares que cubren toda la superficie de
la fisura. Cualquier grieta curvilínea, bien sea central o de borde, puede ser modelada a través
de elementos rectos. El método propuesto calcula los factores de intensidad de esfuerzos
mediante una integral que se resuelve dentro del proceso principal superando la desventaja de
3
la necesidad de procesos posteriores. Esta es una herramienta ideal para el análisis de fractura
de múltiples grietas en sólidos con anisotropía general en dos dimensiones.
La cuarta y última parte está conformada por dos capítulos. En el IV-1 se presentan
procedimientos para la determinación del criterio de localización en medios continuos en dos
casos específicos. El primero corresponde al caso de un modelo con daño isótropo y el
segundo a un modelo de elastoplasticidad con ablandamiento y dominios elásticos suavizados.
Originalmente, los análisis de localización han sido expresados en términos del salto de la tasa
de gradientes de desplazamientos como en Rudnicki y Rice (1975). Bajo condiciones de carga
en ambos lados de la superficie de discontinuidad, la demostración del criterio de localización
es extraordinariamente simple. Sin embargo, bajo condiciones de carga inelástica/descarga
elástica, la demostración es muy complicada (Rice y Rudnicki (1980)).
En este capítulo se deducen condiciones de localización expresadas en términos del
salto en el daño, para el caso de materiales frágiles y del salto en el multiplicador plástico en el
caso de materiales dúctiles. Estas condiciones de localización pueden ser demostradas de una
manera muy simple como en el caso de carga/carga formulado por Rudnicki y Rice (1975),
pero son igualmente válidas en el caso de carga/descarga.
En el capítulo IV-2 se presenta un enfoque alternativo para el análisis de la localización
en estructuras aporticadas con rótulas plásticas. Este tema ha sido estudiado en el pasado (ver
Maier et al. (1973); Bazant y Cedolin (1991); Bazant y Kazemi (1994); Bazant y Jirásek
(1997); entre otros). El presente trabajo parte del estudio presentado en Jirásek (1997) en el
que se analizan las condiciones de localización en un miembro de pórtico con ablandamiento
lineal y sin acortamiento inelástico. Luego, estos resultados se usaron para estudiar el
comportamiento posterior al máximo de algunas estructuras simples pero representativas. PAsí
mismo se generalizan los resultados obtenidos por Jirásek (1997) incorporándole
ablandamiento no lineal general y el efecto de acortamiento inelástico en el miembro de
pórtico. En este capítulo, el procedimiento seguido en el análisis de la localización es diferente
del usado por Jirásek (1997). Nguyen y Bui (1974) proponen una condición para la existencia
y unicidad de la solución en una variedad casi general de modelos de plásticos en medios
continuos. Esta condición asegura que tasas únicas de esfuerzos y de variables internas están
asociadas a una tasa dada de deformaciones. En Nguyen y Bui (1974) no fue considerado el
problema de las estructuras aporticadas, de las rótulas plásticas ni la localización. Sin
4
embargo, en este trabajo se demuestra que si el procedimiento general de Nguyen y Bui se
adapta al problema de pórticos, se obtiene un método simple, general y poderoso para el
análisis de localización en este tipo de estructuras.
Del presente trabajo se han generado las siguientes publicaciones en revistas
internacionales arbitradas:
•
Marante M.E., Flórez-López J., 2002. Análisis tridimensional de elementos de concreto
armado mediante la teoría del daño concentrado. Revista Internacional de Métodos Numéricos
para Cálculo y Diseño en Ingeniería, 18(3), 335-350.
•
Marante M.E., Flórez-López J., 2002. Model of damage for RC elements subjected to
biaxial bending. Engineering Structures, 24(9), 1141-1152.
•
Marante M.E., Flórez-López J., 2003. Three dimensional analysis of reinforced concrete
frames based on Lumped Damage Mechanics. International Journal of Solids and Structures,
40(19), 5109-5123.
•
Delgado S., Sarcos A., Flórez-López J., Picón R., Marante M.E., 2003. Cuantificación del
daño estructural en pórticos planos de concreto armado diseñados según las normas sísmicas
venezolanas vigentes sometidos a excitaciones sísmicas. Revista Internacional de Desastres
Naturales, Accidentes e Infraestructura Civil. Vol. 3, No. 1, pp. 3-11.
•
Denda M., Marante M.E., 2004. Mixed mode BEM analysis of multiple curvilinear cracks
in the general anisotropic solids by the crack tip singular element. International Journal of
Solids and Structures, 41, 1473–1489.
•
Marante M.E., Flórez-López J., 2004. Plastic localization revisited. Journal of Applied
Mechanics, 71.
5
•
Marante M.E., Picón R. y Flórez-López J., 2004. Analysis of localization in frame
members with plastic hinges. International Journal of Solids and Structures, 41(14), 39613975.
•
Marante M.E., Suárez L., Quero A., Redondo J., Vera B., Uzcategui M., Delgado S., León
L., Núñez L., Flórez-López J., PORTAL OF DAMAGE: a Web-Based finite element program
for the analysis of framed structures subjected to overloads. (Enviado a consideración a
Advances in Engineering Software)
Así mismo dio lugar a publicaciones en las memorias de las siguientes reuniones científicas:
•
Marante M.E., Flórez-López J., 2001. Análisis tridimensional de elementos de concreto
armado mediante la Mecánica de la Fractura. Primeras Jornadas de Ingeniería Estructural “Ing.
Mario Paparoni”, Barquisimeto, Venezuela.
•
Marante M.E., Flórez-López J., 2002. Three-dimensional analysis of RC frames based on
lumped damage mechanics. VII Congreso Panamericano de Mecánica Aplicada, Temuco,
Chile.
•
Marante M.E., Picón R. y Flórez-López J., 2002. Localización en un miembro de pórtico
sometido a flexión y fuerzas de compresión. (CIMENICS 2002), Caracas, Venezuela.
•
Avon D., Marante M.E., Flórez-López J., 2002. El doble paso de INTEGRACIÓN: un
algoritmo computacional para mejorar la convergencia en problemas altamente no lineales.
Numerical Methods in Engineering and Applied Sciences (CIMENICS 2002), Caracas,
Venezuela.
•
Marante M.E., Flórez-López J., 2002. Modeling of biaxial bending of RC members based
on fracture mechanics. VII Conferencia Nacional en Ingeniería Sísmica, Boston,
Massachussets, Estados Unidos 21-25.
6
• Delgado S., Flórez-López J., Picón R., Marante M.E., 2002. Un modelo venezolano para
cuantificar el daño estructural en pórticos sismorresistentes. II Congreso Nacional de
Ingeniería Sísmica, Managua, Nicaragua.
• Espinosa R., Flórez-López J., Jaramillo N., Marante M.E., Quero A., Suárez L., 2003.
Rupture of framed structures, lumped damage mechanics and Internet. International
Symposium, Recent Developments in the Modeling of Rupture in Solids, Iguazu, Brasil.
•
Marante M.E., Flórez-López J., 2003. Análisis del daño estructural en edificaciones
tridimensionales de concreto armado sometidas a sobrecargas severas. VII Congreso
Venezolano de Sismología e Ingeniería Sísmica, Barquisimeto, Venezuela.
•
Quero A., Suárez L., Marante M.E., Redondo J., Vera B., Uzcátegui M. y Flórez-López J.,
2004. Portal de Pórticos: Herramienta computacional para el análisis de estructuras
aporticadas basadas en la teoría del daño concentrado. Numerical Methods in Engineering and
Applied Sciences (CIMENICS 2004), San Cristóbal, Venezuela.
•
Marante M.E. y Denda M., 2004. Análisis de múltiples grietas curvilíneas mediante el
método de los elementos de contorno. Numerical Methods in Engineering and Applied
Sciences (CIMENICS 2004), San Cristóbal, Venezuela.
7
PARTE I: EVALUACIÓN DE LA SEGURIDAD ESTRUCTURAL
Conceptos Básicos
8
Capítulo I-1
Teoría de elasticidad
El comportamiento de un miembro o elemento en el que actúan fuerzas depende no
sólo de las leyes fundamentales de la mecánica newtoniana que rigen o gobiernan el equilibrio
de las fuerzas, sino también de las características mecánicas de los materiales de que está
hecho dicho elemento. Existe una gran variedad de materiales y en consecuencia un gran
número de modelos que tratan de describir su comportamiento. Estos modelos toman en
cuenta si los esfuerzos en un instante dependen del estado de deformación en el mismo
instante o de la historia de las deformaciones, si dependen sólo de las deformaciones o si
adicionalmente dependen de la velocidad de deformación, o si la dependencia con las
deformaciones es de forma lineal o no lineal.
El principal objetivo de este capítulo es describir el tipo de material más simple que es
el denominado elástico lineal. En él el comportamiento se plantea como una relación lineal
entre los esfuerzos y las deformaciones en cada punto en un instante determinado. En
consecuencia, al volver el material a un estado de referencia (que habitualmente se identifica
con deformaciones nulas) los esfuerzos desaparecen volviendo a la situación de partida.
En este capítulo se presenta inicialmente un resumen de la notación indicial ya que la
misma es utilizada con frecuencia en los diversos planteamientos realizados a lo largo del
trabajo. Posteriormente se introducen algunos conceptos fundamentales de mecánica de
sólidos que sirven de base para la formulación del modelo elástico. Finalmente se presenta el
Teorema de los Trabajos Virtuales.
I-1.1. Notación Indicial y tensores de orden n:
La notación indicial es una forma de representar los elementos en un conjunto de
cantidades. Un índice es una letra minúscula que aparece como subíndice. En este trabajo se
considera que los índices toman los valores 1, 2 o 3. Por ejemplo, las tres coordenadas de un
punto X en un sistema de ejes coordenados rectangular, se denotan como x1, x2 y x3. En la
notación indicial, una coordenada típica se representa como xi considerando que i toma
valores entre 1 y 3.
9
Sistemas
Una ventaja de esta notación es que un sistema que consta de varios elementos o
componentes puede ser representado por uno solo. Por ejemplo, cualquiera de las tres
componentes V1, V2, V3 de un sistema V es representada por Vi. El conjunto de las tres
componentes constituye un sistema de primer orden. Un sistema de segundo orden es
representado por un elemento típico Aij con dos índices. Los índices i y j pueden tomar valores
entre 1 y 3 de manera independiente. Estos son llamados índices libres. El sistema de segundo
orden tiene nueve componentes. Un sistema de orden n tiene n índices libres y contiene 3n
componentes.
Convención para la sumatoria
La convención para la sumatoria es complementaria a la notación indicial y permite el
uso de expresiones abreviadas cuando se trabaja con sumatorias. En esta convención se
considera que:
1) Cualquier término en el cual se encuentra repetido un índice representa la suma de todos los
términos obtenidos al asignarle por turnos los números 1,2,3 a dicho índice. Considérese por
ejemplo:
3
a i b i ≡ ∑ a i b i = a 1 b1 + a 2 b 2 + a 3 b 3
(I-1.1)
i =1
Si hay varios índices repetidos en un término, cada repetición representa una suma por
ejemplo:
3
3
a ji b ji ≡ ∑∑ a ji b ji =
j=1 i =1
3
∑a
i =1
b + a 2i b 2i + a 3i b 3i
1i 1i
= a 11b11 + a 12 b12 + a 13 b13 + a 21b 21 + a 22 b 22 + a 23 b 23 + a 31b 31 + a 32 b 32 + a 33 b 33
Esta convención requiere que sea repetido un índice pero elimina el uso del símbolo de
sumatoria Σ. El índice repetido puede ser escogido de manera libre por lo tanto, a i b i y a j b j
representan la misma sumatoria a 1b1 + a 2 b 2 + a 3 b 3 .
10
2) Un mismo índice no puede aparecer más de dos veces en un término. Una expresión como
ai bii no tiene sentido, es un error.
3) Se entiende que un índice libre que aparezca en ambos lados de una ecuación se le asigna
el mismo número en ambas partes. Por ejemplo: la ecuación a j = b j + c j representa una de las
tres ecuaciones, a 1 = b1 + c1 , a 2 = b 2 + c 2 , a 3 = b 3 + c 3 .
Es importante aclarar que bj + cj representa una suma vectorial y no una suma escalar de
ningún
tipo.
Es
decir
que
la
siguiente
ecuación
es
incorrecta
b i + c i = b1 + c1 + b 2 + c 2 + b 3 + c 3 .
4) Algunas veces es útil representar solo los elementos que tienen dos índices libres iguales.
En estos casos ambos índices se representan por la misma letra minúscula pero el índice que se
repite se debe encerrar entre paréntesis. Por ejemplo, Ai(i) o A(ii) representa cualquiera de los
tres elementos A11, A22, A33. Se debe tener presente que:
Aii = A11 + A22 + A33
(I-1.2)
5) La divergencia del vector V es ∇⋅V o la suma escalar
∇⋅V =
∂v1 ∂v 2 ∂v 3
+
+
∂x 1 ∂x 2 ∂x 3
En la convención de sumatoria, ∇ ⋅ V =
(I-1.3)
∂v i
donde i es el índice repetido.
∂x i
Notación para la diferenciación:
En la notación indicial se usa una coma para indicar diferenciación. La expresión:
∂v i
se puede simplificar como vi,i. El primer subíndice se refiere a la componente de V, y la
∂x i
11
coma indica derivada parcial con respeto al segundo subíndice correspondiente al eje
coordenado a considerar. En consecuencia:
v i ,i = v1,1 + v 2, 2 + v 3,3
(I-1.4)
Tensores de orden n
Un sistema con n índices libres es un tensor de orden n siempre y cuando sus
componentes obedezcan la siguiente ley de transformación por cambio de espacio de
referencia:
A ´ijk ... = p ia p jb p kc ...A abc...
(I-1.5)
donde A ´ijk ... son las componentes del tensor en el espacio de referencia x 1' , x '2 , x 3' , A abc... son
las componentes del tensor en el espacio de referencia x 1 , x 2 , x 3 y p ia = cos(x i' , x a ) . Puede
observarse que un vector es un tensor de orden uno.
I-1.2. Aspectos fundamentales de Mecánica de Sólidos:
A continuación se presentan algunos conceptos fundamentales y ecuaciones relevantes
de Mecánica de Sólidos que sirven de base para la formulación del análisis de grietas
curvilíneas por el método de los elementos de contorno que se discutirá mas adelante.
Análisis de Esfuerzos:
El análisis de esfuerzos es un cálculo estático a través del cual se obtiene el estado de
esfuerzos de un cuerpo considerado. Este análisis es independiente de las propiedades del
material del cuerpo, que puede ser elástico, plástico, viscoso o cualquier otro tipo. Sin
embargo en este capítulo se estudiará solo el caso elástico.
Definición de Esfuerzo:
En general un cuerpo de materia continua puede estar sujeto a 2 tipos de fuerzas:
fuerzas de volumen y fuerzas de superficie. Las fuerzas de volumen son producidas sin que
12
exista ningún contacto físico con otros cuerpos. Ejemplos de este tipo de fuerzas son las
gravitatorias, las magnéticas y las fuerzas internas. Por otro lado, las fuerzas de superficie son
causadas por el contacto físico con otros cuerpos. Estas pueden ser fuerzas concentradas o no.
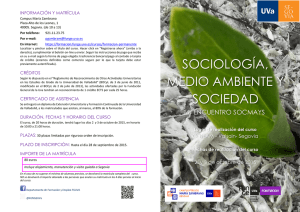
El esfuerzo se define como la fuerza por unidad de área. En la figura I-1.1 se puede
observar una fuerza externa ∆F actuando en un punto P en un plano de un cuerpo en el cual n
es la normal al mismo y ∆A es un área pequeña alrededor del punto P en el plano.
∆F
n
P
∆A
Figura I-1.1. Esfuerzos en un punto.
Matemáticamente el esfuerzo puede ser definido como:
S n = lim ∆A→0
∆F
∆A
(I-1.6)
Por lo general, la dirección de ∆F o Sn no es la misma que la normal al área ∆A. En
consecuencia, Sn puede descomponerse en: σ n perpendicular al área ∆A y σ nt paralela al área
∆A. σ n es llamado esfuerzo normal y σ nt esfuerzo cortante. De allí que:
S2n = σ 2n + σ 2nt
σ n = Sn cos(Sn , n )
(I-1.7)
σ nt = Sn sen (Sn , n )
Estado de esfuerzos en un punto:
Debido a que en un punto P hay un número infinito de esfuerzos, el estado de
esfuerzos está relacionado con algunos planos particulares que pasan a través de él en los
13
cuales el esfuerzo es descompuesto en sus componentes normales y cortantes. Típicamente
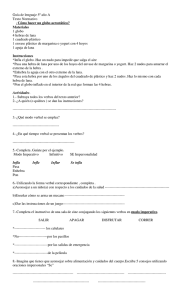
como se muestra en la figura I-1.2, el estado de esfuerzos en un punto puede estar dado por las
coordenadas cartesianas. En esta figura se puede observar la convención utilizada para la
designación de los esfuerzos normales σ11 , σ 22 , σ 33 y los esfuerzos cortantes σ12 , σ 23 , σ 31 . Un
esfuerzo normal que sale de la cara es considerado un esfuerzo de tensión y definido como
positivo. Un esfuerzo normal que entra a la cara es llamado esfuerzo de compresión y por
definición negativo. Para los esfuerzos cortantes se toma la siguiente convención: un esfuerzo
cortante es positivo si tanto el esfuerzo cortante como el vector unitario normal están
orientados ambos en la dirección coordenada positiva o negativa correspondiente. Signos
diferentes en estas direcciones coordenadas indica un valor negativo para el esfuerzo cortante.
x3, u3
σ31
σ33
σ32
σ13
p3
n
p2
b3
σ23
σ22
p1
σ21
σ11
b2ª
b1
x2, u2
x1, u1
Figura I-1.2. Convención de signos: componentes de esfuerzos, fuerzas de superficie y fuerzas de volumen
referidas a las coordenadas cartesianas x1, x2 y x3.
El estado de esfuerzo en un punto P en coordenadas cartesianas puede ser expresado
como:
⎡ σ11
⎢
σ ij = ⎢σ 21
⎢
⎢⎣σ 31
σ12
σ 22
σ 32
σ13 ⎤
⎥
σ 23 ⎥
⎥
σ 33 ⎥⎦
(i, j = 1,2,3)
(I-1.8)
14
De la consideración del equilibrio de momentos en un elemento de material, se puede
observar que el tensor de esfuerzos es simétrico y por lo tanto de las 6 componentes
cartesianas de los esfuerzos cortantes sólo son independientes tres de ellas. Esto es,
σ ij = σ ji
o
σ12 = σ 21 , σ 23 = σ 32 , σ 31 = σ13
(I-1.9)
En consecuencia, la totalidad del campo de esfuerzos tridimensionales en un punto
puede ser determinado por seis componentes. Debido a que estas son cantidades tensoriales,
deben ser medidas en términos de un grupo de coordenadas como se muestra en la expresión
(I-1.8).
Tensor de esfuerzos en notación matricial
Para la representación matricial del tensor de esfuerzos se reemplazará el par de
subíndices ij de las componentes de la expresión (I-1.8) por un único subíndice de acuerdo a la
siguiente equivalencia (11→1), (22→2), (33→3), (23→4), (31→5), (12→6). En este trabajo
para referirse a la matriz de esfuerzos se usará indistintamente las notaciones σ o {σ}:
σ t = {σ1 , σ 2 , σ 3 , σ 4 , σ 5 , σ 6 } = {σ11 , σ 22 , σ 33 , σ 23 , σ 31 , σ12 }
(I-1.10)
El superíndice t indica la transpuesta de la matriz.
Ecuaciones de equilibrio
Si un cuerpo se encuentra en estado de equilibrio, cada punto de él debe estar en
equilibrio. La figura I-1.3 muestra un elemento vecino al punto O, el estado de esfuerzos y el
incremento de los mismos a lo largo de la dirección x1. b1, b2 y b3 son las fuerzas de volumen
como se muestra en la figura I-1.2. Las ecuaciones de equilibrio se obtienen haciendo la
sumatoria de las fuerzas en las direcciones x1, x2 y x3 iguales a cero ya que el punto O está en
equilibrio, obteniéndose las ecuaciones:
15
∂σ11 ∂σ 21 ∂σ 31
+ b1 = 0
+
+
∂x 1 ∂x 2 ∂x 3
∂σ12 ∂σ 22 ∂σ 32
+
+
+ b2 = 0
∂x 3
∂x 1 ∂x 2
(I-1.11)
∂σ13 ∂σ 23 ∂σ 33
+
+
+ b3 = 0
∂x 1 ∂x 2
∂x 3
σ 31 +
σ11
σ 21
∂σ
σ 21 + 21 dx 2
∂x 2
σ 31
∂σ 31
dx 3
∂x 3
σ11 +
∂σ11
dx 1
∂x 1
Figura I-1.3. Componentes de esfuerzo en la dirección x1.
Las ecuaciones (I-1.11) también pueden ser escritas en notación indicial como:
∂σ ij
∂x j
+ bi = 0
o
σ ij, j + b i = 0 en Ω
(i, j = 1,2,3)
(I-1.12)
Donde Ω es el dominio en el que se aplica la ecuación y se supone que está limitada por la
superficie Γ (ver figura I-1.4).
Γ
Γ1
n
Ω
Γ2
Figura I-1.4. Definición geométrica del dominio y contorno de un cuerpo.
16
Condiciones de contorno
Las componentes de esfuerzo son proyectadas en un diferencial del contorno dΓ y
produce fuerzas de superficies o tracciones que son denotadas por pi (ver figura I-1.2) de modo
que:
p1 = σ11n 1 + σ12 n 2 + σ13 n 3
p 2 = σ 21n 1 + σ 22 n 2 + σ 23 n 3
(I-1.13)
p 3 = σ 31n 1 + σ 32 n 2 + σ 33 n 3
En notación matricial se expresan como:
p =σn
(I-1.14)
Donde: n1, n2 y n3 son los cosenos directores de la normal n con respecto a los ejes x1, x2 y x3,
esto es: n1 = cos (n,x1), n2 = cos (n,x2) y n3 = cos (n,x3). La ecuación (I-1.14) puede ser escrita
en notación indicial como:
p i = σ ij n j
en
Γ
(i, j = 1,2,3)
(I-1.15)
Se supone que las tracciones son conocidas en la parte Γ2 del contorno y que son las
condiciones de borde para este problema. De aquí que:
p1 = p1
p 2 = p2
en Γ2
(I-1.16)
p 3 = p3
Donde los términos con barra representan valores conocidos. Estas condiciones implican que
las tracciones aplicadas pi tienen que estar en equilibrio con las componentes de tracciones
obtenidas de los esfuerzos internos en el contorno, esto es:
p i = σ ij n j = pi
en Γ2
(I-1.17)
17
Esfuerzos Principales:
En cada punto de un cuerpo existen planos, conocidos como planos principales, en los
cuales los esfuerzos actuantes son perpendiculares al mismo. Esto implica que no hay
esfuerzos cortantes actuando en estos planos y la dirección de la normal a cada plano es
llamada dirección principal.
Considérese un sólido en un estado de esfuerzos planos como el que se muestra en la
figura I-1.5a. Se suponen conocidos los esfuerzos σ11, σ22 y σ33 y que los esfuerzos σθ y τθ
normales y tangenciales respectivamente, actúan en el plano AB. En la figura I-1.5b se
muestra el diagrama de fuerzas siendo ∆A el área del plano. Suponiendo que el elemento está
en equilibrio y haciendo sumatoria de fuerzas en las direcciones de σθ y τθ se obtiene:
∑ Fσ
∑ Fτ
θ
= σ θ ∆A − σ11∆A cos 2 θ − σ 22 ∆Asen 2 θ − 2σ12 ∆A cos θ senθ = 0
θ
= τ θ ∆A − σ12 ∆Asen 2 θ − σ12 ∆A cos 2 θ + σ11∆A cos θ senθ − σ 22 ∆Asenθ cos θ = 0
(I-1.18)
Expresando las ecuaciones en términos de funciones trigonométricas se obtiene:
σθ =
1
(σ11 + σ 22 ) + 1 (σ11 − σ 22 ) cos 2θ + σ12 sen 2θ
2
2
τ θ = σ12 cos 2θ −
(a)
1
(σ11 − σ 22 ) sen 2θ
2
(I-1.20)
(b)
σ22
A
σθ
τθ
σ11
θ
σ12
(I-1.19)
σ11
τθ∆A
σ11∆Acosθ
θ
σθ∆A
σ12 ∆Acosθ
B
σ21
σ22
σ21 ∆Asenθ
σ22 ∆Asenθ
Figura I-1.5. Diagrama de esfuerzos en dos dimensiones
18
De acuerdo a la definición de plano principal, τθ = 0 por lo que el ángulo θ puede ser obtenido
de la ecuación (I-1.20):
θ=
⎛ 2σ12 ⎞
1
⎟⎟
tan −1 ⎜⎜
2
σ
−
σ
22 ⎠
⎝ 11
(I-1.21)
Con esta ecuación se determinan las direcciones del máximo y del mínimo esfuerzo normal.
Sustituyendo estos valores en la ecuación (I-1.19) se obtienen los valores de dichos esfuerzos.
Análisis de deformación
Todo cuerpo compuesto por una distribución continua de materia sufre deformaciones
cuando se somete a esfuerzos, esto es, las posiciones relativas de varios puntos en el cuerpo se
alteran entre ellas y con respecto a los ejes coordenados. El objetivo del análisis de
deformación consiste en usar una técnica matemática que permita describir la deformación de
un cuerpo. Es necesario distinguir entre un desplazamiento que resulta en el movimiento de
cuerpo rígido y un desplazamiento que produce deformación. Debido a que en el primero el
tamaño y la forma del cuerpo permanecen intactos, es decir, no se producen deformaciones,
por lo general los desplazamientos de cuerpo rígido son despreciados en el análisis de
deformación.
Definición de Deformación
La deformación es una cantidad geométrica que depende del movimiento relativo de
dos o tres puntos en el cuerpo y en consecuencia está relacionada a los desplazamientos
correspondientes a los esfuerzos normal y cortante presentados en las secciones previas.
Existen dos tipos de deformación, la deformación normal ε, definida como el cambio en la
longitud por unidad de longitud inicial del segmento de línea, y la deformación cortante γ,
definida como el cambio angular entre dos segmentos de línea que originalmente eran
perpendiculares (ver figura I-1.6).
19
(a)
x2
(b)
ε11dx1
γ12dx1
τ12
dx2
σ11
dx2
σ11
dx3
x1
γ12
dx1
dx3
dx1
x3
Figura I-1.6. Deformaciones resultantes de esfuerzos unidireccionales (a) normales y (b) cortantes que actúan en
un elemento diferencial de material elástico.
Siendo u1, u2 y u3 los desplazamientos en las direcciones x1, x2 y x3, matemáticamente,
las deformaciones normales pueden ser definidas como:
ε11 =
∂u
∂u 1
∂u
, ε 22 = 2 , ε 33 = 3
∂x 1
∂x 2
∂x 3
(I-1.22)
Un signo positivo de estas ecuaciones implica alargamiento mientras que uno negativo
se aplica a la contracción. Similarmente, por definición las deformaciones cortantes pueden ser
escritas como:
ε12 =
γ
∂u ⎞
γ
γ 12 1 ⎛ ∂u 1 ∂u 2 ⎞
∂u ⎞
1 ⎛ ∂u
1 ⎛ ∂u
⎟⎟; ε 23 = 23 = ⎜⎜ 2 + 3 ⎟⎟; ε 31 = 31 = ⎜⎜ 3 + 1 ⎟⎟
= ⎜⎜
+
2
2 ⎝ ∂x 2 ∂x 1 ⎠
2
2 ⎝ ∂x 3 ∂x 2 ⎠
2
2 ⎝ ∂x 1 ∂x 3 ⎠
(I-1.23)
La deformación cortante es positiva cuando el ángulo entre dos ejes positivos decrece.
En cualquier otro caso es negativa.
En Mecánica de Sólidos las ecuaciones (I-1.22) y (I-1.23) son conocidas como las
relaciones desplazamiento-deformación. También son llamadas relaciones cinemáticas. En
20
forma similar a las componentes de esfuerzos cortante, en las componentes de deformaciones
cortantes se cumple:
ε12 = ε 21 , ε 23 = ε 32 , ε 31 = ε13
(I-1.24)
Las ecuaciones (I-1.22) y (I-1.23) se pueden expresar en notación indicial como:
1 ⎛ ∂u ∂u j ⎞⎟
1
ε ij = ⎜ i +
o ε ij = (u i, j + u j,i )
2 ⎜⎝ ∂x j ∂x i ⎟⎠
2
(i, j = x, y, z )
(I-1.25)
El estado de deformación en un punto puede expresarse en forma tensorial como:
⎡ ε11
⎢
ε ij = ⎢ε 21
⎢
⎢⎣ε 31
ε12
ε 22
ε 32
ε13 ⎤
⎥
ε 23 ⎥
⎥
ε 33 ⎥⎦
(i, j = 1,2,3)
(I-1.26)
Como se puede observar existen solo seis componentes de deformaciones independientes.
En Γ1 (figura I-1.4) se definen las siguientes condiciones de borde:
u 1 = u1 ; u 2 = u 2 ; u 3 = u 3
o
u j = u j ( j = 1,2,3)
en Γ1
en Γ1
(I-1.27)
Donde u j son los valores prescritos. Nótese que la superficie total Γ del contorno es igual a Γ1
+ Γ2 .
Tensor de deformación en notación matricial
Al igual que en el caso de las componentes de esfuerzo, para la representación
matricial del tensor de deformaciones se reemplaza los subíndices ij de las componentes de la
expresión (I-1.26) por un único subíndice de acuerdo a la siguiente equivalencia (11→1),
21
(22→2), (33→3), (23→4), (31→5), (12→6). En consecuencia en notación matricial las
componentes del tensor de deformaciones se agrupan en ε (o {ε}) de la siguiente manera:
ε t = {ε1 , ε 2 , ε 3 , ε 4 , ε 5 , ε 6 } = {ε11 , ε 22 , ε 33 , γ 23 , γ 31 , γ 12 }
(I-1.28)
Compatibilidad de las deformaciones:
Las ecuaciones (I-1.22) y (I-1.23) relacionan seis componentes de deformación con
solo 3 componentes de desplazamiento, es decir, se tienen seis ecuaciones y 3 incógnitas (u1,
u2, u3). Con el fin de garantizar una única solución para los desplazamientos u1, u2 y u3, las
componentes de deformaciones no pueden ser asignadas arbitrariamente sino que deben
satisfacer ciertas restricciones o condiciones de compatibilidad. Las ecuaciones de
compatibilidad se obtienen eliminando las componentes de desplazamiento u1, u2 y u3 en las
ecuaciones (I-1.22) y (I-1.23), diferenciando la parte derecha de las ecuaciones con respecto a
x1, x2 y x3 e intercambiando el orden de diferenciación. De esta manera las ecuaciones de
compatibilidad en problemas tridimensionales son:
∂ 2 ε11 ∂ 2 ε 22
∂ 2 γ12
+
=
2
2
∂x 1∂x 2
∂x 2
∂x 1
;
∂ 2 ε11
∂ ⎛ ∂γ 23 ∂γ 13 ∂γ 12 ⎞
⎟
⎜
=
2
+
+
∂x 2 ∂x 3 ∂x 1 ⎜⎝ ∂x 1 ∂x 2 ∂x 3 ⎟⎠
∂ 2 γ 23
∂ 2 ε 22 ∂ 2 ε 33
+
=
2
2
∂x 2 ∂x 3
∂x 3
∂x 2
;
2
∂ 2 ε 33 ∂ 2 ε11
∂ 2 γ 13
+
=
2
2
∂x 1∂x 3
∂x 1
∂x 3
;
2
∂ 2 ε 22
∂ ⎛ ∂γ 23 ∂γ 13 ∂γ 12 ⎞
⎟
⎜
=
−
+
∂x 3 ∂x 1 ∂x 2 ⎜⎝ ∂x 1 ∂x 2 ∂x 3 ⎟⎠
(I-1.29)
∂ 2 ε 33
∂ ⎛ ∂γ 23 ∂γ13 ∂γ 12 ⎞
⎟
⎜
−
=
+
∂x 1∂x 2 ∂x 3 ⎜⎝ ∂x 1 ∂x 2 ∂x 3 ⎟⎠
Estas seis ecuaciones deben ser satisfechas si las componentes de deformaciones y las
componentes de desplazamiento u1, u2 y u3 son funciones continuas del espacio coordenado
x1, x2 y x3.
Relaciones esfuerzo-deformación
Las ecuaciones de equilibrio (I-1.11) y las relaciones desplazamiento-deformación o
ecuaciones cinemáticas (I-1.22) y (I-1.23) son independientes del tipo de material del cuerpo
en consideración. Las relaciones entre las componentes de esfuerzo y de deformaciones, por el
22
contrario, dependen del tipo de material. En esta sección se supone que el material de un
cuerpo es lineal, elástico y homogéneo de allí que sus propiedades elásticas sean
completamente identificadas a través de las siguientes constantes mutuamente independientes:
módulo de Young E y relación de Poisson ν. La linealidad implica que si el cuerpo se somete
a un esfuerzo entonces la deformación en la dirección del mismo es directamente proporcional
a los esfuerzos aplicados, esto significa que se cumple la Ley de Hooke. Si el tamaño y forma
del cuerpo regresa exactamente a su estado original una vez que los esfuerzos se anulan, se
dice que el cuerpo tiene un comportamiento perfectamente elástico. Finalmente, la
homogeneidad significa que el material de un cuerpo está distribuido uniformemente a través
del volumen del mismo y que las propiedades elásticas son las mismas en todos los puntos del
cuerpo. Estas propiedades son ideales. Ningún material satisface todos estos requerimientos.
Sin embargo, la mayoría de los materiales estructurales, los minerales y las rocas poseen
características y propiedades elásticas que permiten ser analizados a través de la teoría de
elasticidad.
Hasta ahora se ha descrito el tensor de esfuerzos que se obtuvo a través de
consideraciones de equilibrio y el tensor de deformaciones obtenido a partir de
consideraciones cinemáticas. Estos tensores están relacionados entre si a través de las leyes
constitutivas que dependen de la naturaleza del material. Debido a que se considera el
comportamiento como elástico lineal, cada componente del esfuerzo está relacionada
linealmente, en el caso general, con todas las deformaciones a través de la Ley de Hooke
generalizada que tiene la forma:
σ = Cε
(I-1.30)
o en notación indicial:
σ ij = C ijkl ε kl
(I-1.31)
Donde C es un tensor de orden 4, cuyos 81 componentes son los coeficientes de elasticidad.
Debido a que σij y εkl son simétricos, Cijkl también es simétrico en
ij
y en
kl
reduciéndose el
número de componentes independientes a 36. Por otra parte, se admite la existencia de la
función escalar de energía de deformación U tal que dU = σ ijdε ij . Cumpliendo la Ley de
23
1
Hooke esta función debe tener la forma U = C ijkl ε ijε kl y el tensor Cijkl debe cumplir la
2
siguiente propiedad de simetría:
Cijkl = Cklij
(I-1.32)
En consecuencia, de los restantes treinta y seis términos de Cijkl, solo veintiuno son
independientes. Si se considera que el material es homogéneo, podemos considerar Cijkl como
un grupo de constantes para una referencia dada.
En el caso de que el material sea isótropo, las relaciones esfuerzo-deformación en el
caso tridimensional, se pueden escribir matricialmente, como:
λ
λ
⎧ σ11 ⎫ ⎡λ + 2µ
⎪ ⎪ ⎢
⎪σ 22 ⎪ ⎢ λ
λ + 2µ
λ
⎪ ⎪ ⎢
⎪σ 33 ⎪ ⎢ λ
λ
λ + 2µ
⎪ ⎪ ⎢
⎨ ⎬=
0
0
⎪σ 23 ⎪ ⎢ 0
⎪ ⎪ ⎢
0
0
⎪σ 31 ⎪ ⎢ 0
⎪ ⎪ ⎢
⎢
0
0
⎩⎪σ12 ⎭⎪ ⎣ 0
0
0
0
0
0
0
µ 0
0 µ
0
0
0 ⎤ ⎧ ε11 ⎫
⎥⎪ ⎪
0 ⎥ ⎪ε 22 ⎪
⎥⎪ ⎪
0 ⎥ ⎪⎪ε 33 ⎪⎪
⎥⎨ ⎬
0 ⎥ ⎪γ 23 ⎪
⎥⎪ ⎪
0 ⎥ ⎪ γ 31 ⎪
⎥⎪ ⎪
µ ⎥⎦ ⎩⎪ γ 12 ⎭⎪
(I-1.33a)
es decir:
⎡ ν
⎤
σ ij = λδ ijε kk + 2µε ij = 2µ ⎢
δ ijε kk + ε ij ⎥
⎣1 − 2ν
⎦
(I-1.33b)
Donde:
δ ij es la funcion Delta de Kronecker ( ≡ 1 para i = j , ≡ 0 para i ≠ j )
ε kk = ε11 + ε 22 + ε 33
λ=
νE
, constante de Lame
(1 + ν )(1 − 2ν )
24
µ=G=
E
, módulo cortante
2(1 + ν)
E = módulo de Young
ν = relación de Poisson
Las componentes de deformación pueden ser obtenidas a partir de los esfuerzos mediante la
siguiente ecuación:
ε = Sσ
(I-1.34)
o
0
0
0 ⎤ ⎧ σ11 ⎫
⎧ ε11 ⎫
⎡ 1 −ν −ν
⎪ ⎪
⎥⎪ ⎪
⎢
⎪ε 22 ⎪
⎢− ν 1 − ν
0
0
0 ⎥ ⎪σ 22 ⎪
⎪ ⎪
⎥⎪ ⎪
⎢
⎪ε 33 ⎪ 1 ⎢− ν − ν 1
⎥ ⎪⎪σ 33 ⎪⎪
0
0
0
⎪ ⎪
⎥⎨ ⎬
⎢
=
⎨ ⎬
E
⎥ ⎪σ 23 ⎪
⎢
γ
0
0
0
2
(
1
)
0
0
+
ν
⎪ 23 ⎪
⎥⎪ ⎪
⎢
⎪ ⎪
⎢0
0
0
0
2(1 + ν)
0 ⎥ ⎪σ 31 ⎪
⎪ γ 31 ⎪
⎥⎪ ⎪
⎢
⎪ ⎪
⎢
⎪⎩ γ 12 ⎪⎭
0
0
0
0
2(1 + ν )⎥⎦ ⎪⎩σ12 ⎪⎭
⎣0
(I-1.35)
donde S = C-1.
Ortotropía y planos de simetría elástica
Es importante hacer notar que un material isótropo solo tiene 2 constantes elásticas
independientes, por lo que de conocerse dos propiedades cualesquiera las otras pueden ser
calculadas a partir de ellas. En el caso más general el material puede ser anisótropo. En este
caso el número total de constantes elásticas es veintiuno. Este número de constantes para un
material elástico, puede ser reducido cuando la estructura del material tiene uno o más planos
de simetría elástica.
Un material posee un plano de simetría elástica si los coeficientes de la matriz C
permanecen idénticos en un par de sistemas de coordenadas que son imágenes el uno del otro
(véase figura I-1.7).
25
(a)
(b)
B
AA
A
B
B
A
A
B
Figura I-1.7. (a) Plano de simetría material; (b) Plano que no corresponde a una simetría material
Materiales con dos planos de simetría ortogonales se llaman ortótropos y el número de
coeficientes independientes se reduce de 21 a 9. En el caso ortótropo, las componentes de
deformación pueden ser obtenidas a partir de los esfuerzos mediante la siguiente ecuación:
⎡ 1
⎢ E
1
⎧ ε11 ⎫ ⎢ ν
⎪ ⎪ ⎢− 21
⎪ε 22 ⎪ ⎢ E 2
⎪ ⎪ ⎢ ν 31
⎪ε 33 ⎪ ⎢ −
⎪ ⎪ ⎢ E3
⎨ ⎬=⎢
⎪γ 23 ⎪ ⎢ 0
⎪ ⎪ ⎢
⎪ γ 31 ⎪ ⎢
⎪ ⎪ ⎢ 0
⎩⎪ γ 12 ⎭⎪ ⎢
⎢ 0
⎢⎣
ν12
E1
1
E2
ν
− 32
E3
ν13
E1
ν
− 23
E2
1
E3
0
−
−
0
0
0
0
0
0
0
1
G 23
0
0
0
0
1
G 31
0
0
0
0
⎤
0 ⎥
⎥ ⎧ σ11 ⎫
0 ⎥⎪ ⎪
⎥ ⎪σ ⎪
⎥ ⎪ 22 ⎪
0 ⎥ ⎪σ ⎪
⎥ ⎪ 33 ⎪
⎥⎨ ⎬
0 ⎥ ⎪σ 23 ⎪
⎥⎪ ⎪
⎪σ 31 ⎪
0 ⎥⎪ ⎪
⎥
⎩⎪σ12 ⎭⎪
1 ⎥
⎥
G 12 ⎥⎦
(I-1.36)
De acuerdo a las condiciones de simetría se tiene:
26
ν13 ν 31
=
,
E1 E 3
ν12 ν 21
=
,
E1 E 2
ν 23 ν 32
=
E2 E3
(I-1.37)
Este tipo de material en el sistema de ejes coordenados mostrado en la figura I-1.8 tiene
entonces 9 coeficientes independientes, que son:
•
3 módulos de elasticidad, E1, E2 y E3
•
3 módulos de corte, G12, G23 y G31
•
3 coeficientes de Poisson ν12, ν23 y ν31
x2
x1
x3
Figura I-1.8. Material Ortótropo
Las 3 ecuaciones de equilibrio (ecuaciones I-1.11), las 6 relaciones desplazamientodeformación (ecuaciones I-1.22 y I-1.23) y las 6 ecuaciones constitutivas (ecuaciones I-1.30 o
I-1.34) forman un sistema de ecuaciones del cual se pueden determinar las 6 componentes de
esfuerzo, las 6 componentes de deformaciones y los 3 desplazamientos.
Estado de Esfuerzos planos:
La condición de esfuerzos planos se usa para analizar problemas de elasticidad en los
cuales un cuerpo es sometido a fuerzas en el plano y una de sus dimensiones es muy pequeña
en comparación con el resto del cuerpo. Como se muestra en la figura I-1.9 las condiciones de
contorno para la placa delgada son:
27
σ 33 = σ13 = σ 23 = 0
(I-1.38)
x2
x2
O
x1
x3
B
Cargas en el plano
Figura I-1.9. Ilustración de estado de esfuerzos planos
Debido a que el espesor B es suficientemente pequeño comparado con las otras dos
dimensiones de la placa y ya que las cargas aplicadas en el contorno son uniformes a lo largo
del espesor B, se puede suponer que las condiciones anteriores son también válidas en la
sección transversal de la placa. En este caso, se supone que los esfuerzos restantes σ11 , σ 22 y
σ12 no varían a lo largo del espesor B. En consecuencia, este problema se transforma en uno
bidimensional en el cual la tercera dimensión, en sentido del eje x3, puede ser ignorada y la
Ley de Hooke se aplica como:
1
(σ11 − νσ 22 )
E
1
ε 22 = (σ 22 − νσ11 )
E
σ12
γ 12 =
µ
ε11 =
(I-1.39)
Estado de deformaciones planas generalizadas en elasticidad anisótropa
En problemas de deformaciones planas en elasticidad anisótropa se considera que el
desplazamiento u t = {u 1 , u 2 , u 3 } depende solo de las coordenadas x1 y x2. Este caso se
presenta cuando la geometría y la carga no varían en dirección del eje x3, es decir, en la
28
dirección fuera del plano. Si el material anisótropo tiene un plano de simetría paralelo al plano
x1-x2 entonces las deformaciones en el plano (u1 y u2) y las deformaciones fuera del plano (u3)
están desacopladas. En cualquier otro caso, existe acoplamiento total entre las dos
deformaciones.
Utilizando un único índice para representar las componentes de los tensores de
esfuerzos y deformaciones, como se describió anteriormente, y en ausencia de fuerzas de
volumen, las ecuaciones de equilibrio se reducen a:
∂σ1 ∂σ 6
+
=0
∂x 1 ∂x 2
∂σ 6 ∂σ 2
=0
+
∂x 1 ∂x 2
(I-1.40)
∂σ 5 ∂σ 4
+
=0
∂x 1 ∂x 2
Las componentes de deformación no nulas están dadas por:
ε1 =
∂u
∂u
∂u
∂u 1
∂u
∂u
, ε 2 = 2 , ε 4 = 3 , ε5 = 3 , ε6 = 2 + 1
∂x 1 ∂x 2
∂x 1
∂x 2
∂x 2
∂x 1
(I-1.41)
Las relaciones esfuerzo-deformación están dadas por:
εM =
∑S
MN
N =1, 2 , 4 , 5, 6
σN
(M = 1,2,4,5,6)
(I-1.42)
donde SMN es la inversa de la matriz de coeficientes elásticos reducida como:
SMN = s MN − (s M 3s 3 N ) / s 33
(M, N = 1, 2, 4, 5, 6)
(I-1.43)
en función de los términos de sij (i, j = 1, 2, 3, 4, 5, 6).
Las ecuaciones de compatibilidad están dadas por:
29
∂ 2ε6
∂ 2 ε1 ∂ 2 ε 2
+
−
=0
2
2
∂x 1∂x 2
∂x 2
∂x 1
∂ε 4 ∂ε 5
−
=0
∂x 1 ∂x 2
(I-1.44)
Coordenadas polares
En general los problemas en teoría de elasticidad pueden ser simplificados desde el
punto de vista matemático si el contorno del cuerpo se hace coincidir con el sistema
coordenado escogido. Por ejemplo, los problemas que involucran dimensiones cilíndricas
pueden ser resueltos mas fácilmente usando un sistema cilíndrico de coordenadas polares con
el origen del sistema en el centro del cilindro. A continuación se presentan los principios
generales de las coordenadas cilíndricas polares y se deducen las ecuaciones de equilibrio y
compatibilidad.
Componentes de esfuerzo en coordenadas cilíndricas polares
En la figura I-1.10 se muestran las componentes de esfuerzos en coordenadas
cilíndricas polares. El estado de esfuerzo en un punto puede ser dado en coordenadas
cilíndricas polares como:
⎡ σ rr
⎢
σ ij = ⎢σ θr
⎢
⎢⎣σ zr
σ rθ
σ θθ
σ zθ
σ rz ⎤
⎥
σ θz ⎥
⎥
σ zz ⎥⎦
(i, j = r, θ, z)
(I-1.45)
en donde:
σ rθ = σ θr , σ zr = σ rz , σ θz = σ zθ
(I-1.46)
Ecuaciones de equilibrio en términos de coordenadas cilíndricas polares
De manera similar a como se dedujeron las ecuaciones de equilibrio en coordenadas
cartesianas, éstas ecuaciones en términos de coordenadas cilíndricas polares pueden ser
deducidas suponiendo que el estado de esfuerzos que se muestra en la figura I-1.10 está en
equilibrio.
30
σz
Z
τzθ
σr
dθ
τzr
τθz
τrθ
τrz τθr
σθ
r
θ
Figura I-1.10. Componentes de esfuerzo en coordenadas cilíndricas polares en tres dimensiones
En consecuencia, en ausencia de fuerzas de volumen:
∂σ r ∂σ rθ ∂σ rz σ r − σ θ
+
+
+
=0
∂r
∂z
r∂θ
r
∂σ θ ∂σ θr ∂σ θz 2σ rθ
+
+
+
=0
r∂θ
r
r
∂z
∂σ z ∂σ zθ ∂σ zr σ zr
+
=0
+
+
r∂θ
∂z
r
∂z
(I-1.47)
donde:
r = distancia desde el origen
θ = ángulo
Relaciones desplazamiento-deformación
En coordenadas cilíndricas polares las deformaciones normales y cortantes se definen
como:
εr =
∂u
u ∂u
∂u 1
; εθ = 1 + 2 ; εz = 3
r r∂θ
∂r
∂z
∂u
u
∂u ∂u
∂u
∂u ∂u
γ rθ = 1 + 2 − 2 ; γ θz = 2 + 3 ; γ zr = 1 + 3
r∂θ ∂r
r
∂z
∂r
∂z r∂θ
(I-1.48)
31
donde:
u1= desplazamiento en la dirección r, es decir, desplazamiento radial
u2 = desplazamiento en la dirección θ, es decir, desplazamiento tangencial
u3 = desplazamiento en la dirección z, es decir, desplazamiento vertical
Ecuaciones de Compatibilidad
Considerando el caso de problemas bidimensionales, la ecuación de compatibilidad se
obtiene eliminando las componentes de desplazamiento de la ecuación (I-1.48):
∂ 2 (σ r + σ θ ) ∂ 2 (σ r + σ θ ) ∂ (σ r + σ θ )
+
+
=0
r∂r
∂r 2
r 2 ∂θ 2
(I-1.49)
o
⎛ ∂2
∂2
∂ ⎞
⎟(σ r + σ θ ) = 0
⎜⎜ 2 + 2 2 +
r∂r ⎟⎠
r ∂θ
⎝ ∂r
(I-1.50)
es decir:
∇ 2 (σ r + σ θ ) = 0
(I-1.51)
Funciones de Esfuerzo
La Función de Esfuerzos de Airy
En las secciones previas, se ha demostrado que los problemas de esfuerzos planos en
teoría elástica se reducen a la solución de las dos ecuaciones diferenciales de equilibrio y la
ecuación diferencial de compatibilidad. Las constantes de integración se evalúan en función de
las condiciones de borde. Es posible encontrar una función de esfuerzo Φ que cumpla las
condiciones de equilibrio y compatibilidad así como las condiciones de borde. Esta función es
conocida como la función de esfuerzo de Airy.
Suponiendo ausencia de fuerzas de volumen, la función de esfuerzo de Airy es definida
como:
σ11 =
∂ 2Φ
∂ 2Φ
∂ 2Φ
σ
=
σ
=
−
,
,
22
12
2
2
∂x 1∂x 2
∂x 2
∂x 1
(I-1.52)
32
Considérese las siguientes condiciones de equilibrio en dos dimensiones y en ausencia
de fuerzas de volumen:
∂σ11 ∂σ 21
⎫
+
= 0⎪
∂x 1 ∂x 2
⎪
⎬
∂σ 22 ∂σ12
⎪
+
= 0⎪
∂x 2
∂x 1
⎭
(I-1.53)
Sustituyendo las ecuaciones (I-1.52) en las ecuaciones (I-1.53) se demuestra que la
función de Airy satisface las condiciones de equilibrio. A continuación consideremos la
ecuación de compatibilidad en dos dimensiones:
∂ 2 γ 12
∂ 2 ε11 ∂ 2 ε 22
=
+
2
2
∂x 1∂x 2
∂x 1
∂x 2
(I-1.54)
Sustituyendo las ecuaciones (I-1.52) en la ecuación (I-1.54) y considerando un material
isótropo, se obtiene:
∂ 4Φ
∂ 4Φ
∂ 4Φ
+
2
+
=0
4
2
2
4
∂x 1
∂x 1 ∂x 2
∂x 2
(I-1.55)
∇ 2 (∇ 2 Φ ) = ∇ 2 (σ11 + σ 22 ) = 0
(I-1.56)
o
donde:
∇2 =
∂2
∂2
+
2
2
∂x 1
∂x 2
(I-1.57)
La ecuación (I-1.57) es conocida como la ecuación Laplaciana. Cualquier función Φ
que satisface la ecuación (I-1.57) también satisface la condición de compatibilidad y las
condiciones de equilibrio.
33
Vector de funciones de esfuerzo
En el caso de deformaciones planas generalizadas isótropas o anisótropas, se introduce
una función de esfuerzo de valores reales φ = {φ1, φ2, φ3} tal que
σ1j = −
∂φ j
∂x 2
;
σ2 j =
∂φ j
∂x 1
( j = 1,2,3)
(I-1.58)
Se puede comprobar con facilidad que las ecuaciones de equilibrio para los esfuerzos
definidos en (I-1.58) se cumplen también automáticamente.
Función de esfuerzos en variable compleja
Como se planteó anteriormente, el campo de esfuerzos elásticos en un cuerpo con
contornos continuos puede ser determinado a través de funciones de esfuerzos. Sin embargo,
determinar las concentraciones de esfuerzos alrededor de un hueco o en una grieta de borde en
una placa es extremadamente difícil utilizando el método convencional debido a que estos
casos involucran “contornos no continuos”. Se demuestra que las funciones de esfuerzo en
variable compleja son una herramienta matemática importante y muy útil para la resolución de
problemas elásticos de cuerpos con contornos no continuos como en el caso de placas con
grietas de borde.
Lekhnitskii (1963) y Eshelby et al. (1969) propusieron un vector de función de
esfuerzos de la forma:
3
φi = 2ℜ∑ L iα f α (z α )
(I-1.59)
α =1
en términos de tres funciones analíticas f1 (z1 ), f 2 (z 2 ) y f 3 (z 3 ) de las variables complejas
generalizadas zα. ℜ significa “parte real de”. La expresión de las variables complejas
generalizadas zα es: z α = x 1 + p α x 2 para α = 1,2,3 . pα , junto con sus conjugados, son las tres
raíces distintas de la ecuación polinómica característica de sexto orden que se presenta mas
adelante en la ecuación (I-1.60).
34
Siguiendo el mismo procedimiento del método de la función de Airy, es posible
expresar las componentes de esfuerzos y de deformaciones en términos de la función de
esfuerzos propuesta φi mediante las ecuaciones (I-1.42) y (I-1.58). Adicionalmente, cuando la
expresión de deformaciones es sustituida en la ecuación de compatibilidad (I-1.44) se obtiene
la ecuación característica de sexto orden que es función de p:
d ( 4 ) ( p) d ( 2 ) ( p ) − d ( 3) ( p) d ( 3) ( p ) = 0
(I-1.60)
Los coeficientes de Liα que están dados como las componentes de la matriz L:
⎡− p1L 21
⎢
L = [L iα ] = ⎢ L 21
⎢
⎢⎣ r1L 21
− p 2 L 22
L 22
r2 L 22
− p 3 r3 L 33 ⎤
⎥
r3 L 33 ⎥
⎥
L 33 ⎥⎦
(I-1.61)
donde:
d ( 4) (p) = p 4S11 − 2p 3S16 + p 2 (2S12 + S66 ) − 2pS26 + S22 ,
d ( 3) (p) = p 3S15 − p 2 (S14 + S56 ) + p(S25 + S46 ) − S24 ,
(I-1.62)
d ( 2) (p) = p 2S55 − 2pS45 + S44
y
r1 =
d ( 3) ( p 3 )
d ( 3) (p1 )
d ( 3) ( p 2 )
=
=
,
r
,
r
2
3
d ( 2) (p1 )
d ( 2) (p 2 )
d ( 4) (p 3 )
(I-1.63)
Llamando l α = {L1α , L 2 α , L 3α }t a la columna α de la matriz L, en el proceso de integración de
las componentes de deformación para obtener las componentes de desplazamiento, se
introduce la matriz A de 3x3:
A = [a 1 , a 2 , a 3 ]
(I-1.64)
donde:
35
⎡ s16
⎧ A1α ⎫ ⎢
⎪⎪
⎪⎪ ⎢ s
a α = ⎨A 2α ⎬ = ⎢ 26
⎪
⎪ ⎢⎢
⎪⎩A 3α ⎪⎭
⎢ s 56
⎣
− s11p α
s12
− s 21p α
pα
s 22
pα
− s 51p α
s 52
s14 − s15 p α ⎤
⎥ ⎧ L1α ⎫
⎥
⎪⎪
s 24 − s 25 p α ⎥ ⎪⎪
L
⎥ ⎨⎪ 2 α ⎬⎪
pα
⎥ ⎪L ⎪
s 54 − s 55 p α ⎥ ⎩ 3α ⎭
⎦
(I-1.65)
En el anexo A se presenta la deducción detallada de la matriz A. Nótese que por cada raíz
característica pα se determinan vectores l α = {L1α , L 2 α , L 3α }t y a α = {A1α , A 2α , A 3α }t . Estos
factores pueden ser normalizados como propuso Denda (2001) a través de la relación
3
2∑ L iα A iα = 1
(I-1.66)
i =1
Esta normalización genera las siguientes propiedades de ortogonalidad:
Lt A + A t L = I = Lt A + A t L
(I-1.67)
y
Lt A + A t L = 0 = Lt A + A t L
donde I es la matriz identidad de 3x3 y 0 es una matriz nula de 3x3.
Utilizando A iα y L iα se pueden representar los desplazamientos y la función de esfuerzo
como:
3
u i = 2ℜ∑ A iα f α (z α ),
α =1
3
φ i = 2ℜ∑ L iα f α (z α )
(I-1.68)
α =1
Donde ℜ indica la parte real de una variable compleja. De la relación (I-1.58) y de la función
de esfuerzo (I-1.59) se pueden expresar las componentes del tensor de esfuerzos como:
⎡ 3
⎤
σ1i = 2ℜ ⎢∑ L iα p α f α´ (z α )⎥
⎣ α =1
⎦
⎡ 3
⎤
y σ 2i = 2ℜ ⎢∑ L iα f α´ (z α )⎥
⎣ α =1
⎦
(I-1.69)
36
donde ( )´ indica la derivada con respecto al argumento de la función.
I-1.3. Principio de los Trabajos Virtuales o de las Potencias Virtuales
El Principio de los Trabajos Virtuales establece que si una estructura general es
sometida a un sistema de desplazamientos virtuales pequeños que satisface las condiciones de
contorno, el trabajo virtual de las acciones externas es igual a la energía virtual de
deformación de los esfuerzos internos.
U* = W*
(I-1.70)
donde U* es la energía de deformación virtual de los esfuerzos internos y W* es el trabajo
virtual de las acciones externas.
La energía de deformación virtual de los esfuerzos internos puede ser escrita como:
U * = ∫ σ t ε * dΩ
(I-1.71)
Ω
Adicionalmente, el trabajo virtual de las fuerzas externas se escribe como:
W * = ∫ b t u * dΩ + ∫ p t u * dΓ + ∑ f t u *
Ω
(I-1.72)
Γ
Donde el primer término de la derecha el trabajo de las fuerzas de volumen, el segundo
término el de las fuerzas de superficie y el tercero el trabajo de las fuerzas externas.
Sustituyendo las expresiones (I-1.71) y (I-1.72) en (I-1.70), se obtiene:
∫σ
Ω
t
ε *dΩ = ∫ b t u *dΩ + ∫ p t u * dΓ + ∑ f u *
t
Ω
(I-1.73)
Γ
Esta es una expresión muy utilizada para la definición de las ecuaciones de equilibrio que se
utilizan en diversas formulaciones del comportamiento de estructuras.
37
Capítulo I-2
Mecánica de la fractura frágil
I-2.1. Balance de Energía de Griffith
De acuerdo a la Segunda Ley de la Termodinámica, cuando un sistema pasa de un
estado inestable a uno en equilibrio, debe haber un decrecimiento neto de energía. Griffith
(1921) aplicó esta idea al modelado del crecimiento de una grieta, pero G. Irwin (1948) es el
principal responsable del desarrollo de la versión de la propuesta que se presenta a
continuación.
Una grieta puede crecer solamente si durante el proceso, la energía total decrece o
permanece constante. En consecuencia, la condición crítica para la fractura puede ser definida
como el punto donde el crecimiento de la grieta ocurre bajo condiciones de equilibrio, sin
cambio neto de la energía total.
Considérese la placa de la figura I-2.1 que contiene una grieta de longitud 2a y está
sometida a un esfuerzo constante σ lejos de la grieta. Se supone que el ancho de la placa es
mucho mayor de 2a y que prevalecen las condiciones de esfuerzos planos. El enfoque
energético establece que la propagación de la grieta ocurre cuando la energía disponible para
su crecimiento es suficiente para superar la resistencia del material. La resistencia del material
puede incluir energía de superficie, trabajo plástico o cualquier otro tipo de disipación de
energía asociada a la propagación de grieta.
El balance de energía de Griffith para un incremento diferencial del área de grieta, dA,
bajo condiciones de equilibrio puede ser expresado de la siguiente manera:
dE dΠ dWs
=
+
=0
dA dA dA
−
dΠ dWs
=
dA
dA
o
(I-2.1a)
(I-2.1b)
Donde E es la energía total, Π es la energía potencial suministrada por la energía de
deformación interna y las fuerzas externas y Ws es el trabajo requerido para crear nuevas
superficies. Se define la tasa de disipación de energía G = −dΠ / dA , como la tasa de cambio
38
de la energía potencial con respecto al área de grieta para un material elástico lineal. El área de
grieta (A) se define como el área proyectada de la grieta (2aB en el ejemplo presentado),
mientras que el área de superficie es 2A ya que la grieta está constituida por dos superficies.
En el momento de la fractura, G = Gc que es la tasa crítica de disipación y una medida de la
dureza a la fractura del material.
Para la placa de la figura I-2.1, Griffith usó el análisis de esfuerzos propuesto por Inglis
para mostrar que:
πσ 2 a 2 B
Π = Π0 −
E
(I-2.2)
Π0 es la energía potencial de una placa sin grietas y B es el espesor de la placa. Ya que la
formación de una grieta requiere la creación de dos superficies, Ws esta dada por:
Ws = 4aBγ s
(I-2.3)
Donde γs es la energía superficial del material. De allí que:
G=−
dΠ πσ 2 a
=
dA
E
(I-2.4a)
G cr =
dWs
= 2γ s
dA
(I-2.4b)
y
σ
B
2a
Figura I- 2.1. Hueco elíptico en una placa infinita sometida a esfuerzos de tensión uniforme remotos
39
Haciendo G = Gc se obtiene el esfuerzo de fractura
⎛ 2Eγ s ⎞
σf = ⎜
⎟
⎝ πa ⎠
1/ 2
(I-2.5)
Se puede notar que el esfuerzo de propagación de fisura σf varía con 1
a . La tasa de
disipación de energía, G, es la fuerza conductora para la fractura, mientras que Gc es la
resistencia a la fractura del material.
I-2.2. Factores de Intensidad de Esfuerzos
Análisis de esfuerzos en una grieta
Para ciertas configuraciones de grietas sometidas a fuerzas externas, es posible derivar
expresiones del esfuerzo en el cuerpo suponiendo un comportamiento isótropo, elástico y
lineal del material. Utilizando ejes coordenados polares con el origen en el vértice de la grieta,
se puede demostrar que el campo de esfuerzos en cualquier cuerpo elástico lineal agrietado
está dado por:
m
∞
⎛ k ⎞
(m)
σ ij = ⎜ ⎟f ij (θ) + ∑ A m r 2 g ij (θ)
m =0
⎝ r⎠
(I-2.6)
donde: σ ij es el tensor de esfuerzos, r y θ se definen como se muestra en la figura I-2.2, k es
una constante y fij es una función adimensional de θ. Los términos de orden superior dependen
de la geometría pero la solución para cualquier configuración contiene un término que es
proporcional a 1
r . Cuando r → 0 éste término tiende a infinito pero los otros términos
permanecen finitos o tienden a cero. En consecuencia, el esfuerzo cerca del vértice de la grieta
varía con 1
r , independientemente de la configuración del cuerpo agrietado. También se
puede demostrar que los desplazamientos cerca del vértice de la grieta varían con
r . La
ecuación (I-2.6) describe una singularidad de esfuerzo ya que el esfuerzo es asintótico en r = 0.
40
σ22
x2
τ12
σ11
τ21
r
θ
GRIETA
x1
Figura I- 2.2. Definición de los ejes coordenados en el vértice de una grieta. (La dirección z es perpendicular a
la página.)
Una grieta puede ser sometida a tres tipos diferentes de cargas, como se muestra en la
figura I-2.3. En el Modo de carga I (figura I-2.3a), la carga principal se aplica perpendicular al
plano de la grieta y hace que la misma tienda a abrirse. El Modo II (figura I-2.3b) que
corresponde a carga cortante en el plano y hace que las caras de la grieta tiendan a deslizar una
con respecto a la otra. El Modo III (figura I-2.3c) se refiere a cortante fuera del plano. Un
cuerpo agrietado puede ser cargado en cualquiera de los tres modos o en una combinación de
dos o de tres modos.
σ
τ
(a)
σ
τ
(c)
(b)
τ
τ
Figura I-2.3. Modos de carga en una grieta
Factores de Intensidad de Esfuerzos
Cada modo de carga produce la singularidad de 1
r en el vértice de la grieta pero la
constante de proporcionalidad k y fij dependen del modo de carga. En este momento es
conveniente remplazar k por el factor de intensidad de esfuerzos, K, donde K = k 2π . Al
41
factor de intensidad de esfuerzos se le agrega un subíndice que indica el modo de carga, esto
es, KI, KII o KIII. En consecuencia, el campo de esfuerzos en el vértice de una grieta en un
material elástico isótropo lineal puede ser escrito como:
lim σ ij
( I)
lim σ ij
( II )
lim σ ij
( III)
r →0
r →0
r →0
=
KI
=
K II
=
K III
2πr
2πr
2πr
(I)
f ij (θ)
f ij
( II )
f ij
(I-2.7a)
(θ)
( III)
(I-2.7b)
(θ)
(I-2.7c)
para los modos I, II y III, respectivamente. En un problema de modo combinado (cuando están
presentes más de un modo), las contribuciones individuales a un esfuerzo dado son aditivas:
σ ij
( total )
= σ ij
(I)
+ σ ij
( II )
+ σ ij
( III)
(I-2.8)
I-2.3. Relación entre K y el comportamiento global
Con el fin de que el factor de intensidad de esfuerzos sea útil, es necesario que K sea
determinado a partir de las cargas remotas y de la geometría. Se han derivado algunas
expresiones de K para algunas configuraciones simples. En situaciones más complejas el
factor de intensidad de esfuerzos puede ser determinado a partir de análisis numéricos o
experimentales.
Una configuración para la cual existe una solución K es la de una placa infinita
sometida a esfuerzos de tensión remotos con una grieta interna, como se muestra en la figura
I-2.1. Debido a que el esfuerzo remoto σ es perpendicular al plano de la grieta, la carga es
puramente de Modo I. Los cuerpos elásticos lineales deben experimentar esfuerzos
proporcionales, esto es, todas las componentes de esfuerzos en cualquier ubicación se
incrementan proporcionalmente a las fuerzas aplicadas remotamente. Por esta razón, los
42
esfuerzos en el vértice de la grieta deben ser proporcionales a los esfuerzos remotos. En este
caso la solución tiene la forma:
K I = σ πa
(I-2.9)
Para esta configuración entonces, la amplitud de la singularidad en el vértice de la
grieta es proporcional al esfuerzo remoto y a la raíz cuadrada del tamaño de la grieta. El factor
de intensidad de esfuerzos para una carga de Modo II aplicada en la placa de la figura I-2.1
puede ser obtenido reemplazando σ en la ecuación (I-2.9) por el esfuerzo cortante aplicado
remotamente.
Para una placa semi-infinita con una grieta en el borde (figura I-2.4) el factor de
intensidad de esfuerzos está dado por:
K I = 1.12 πa
(I-2.10)
El incremento de 12% en KI en este caso se debe a la diferencia en las condiciones de
contorno en el extremo libre. Como se muestra en la figura I-2.4, la grieta de borde se abre
mas porque está menos restringida que la grieta central, que toma forma elíptica cuando es
cargada.
σ
a
σ
Figura I-2.4. Grieta de borde en una placa semi-infinita sujeta a esfuerzos de tensión remotos.
43
Considérese una grieta interna en una placa infinita donde la normal al plano de la
grieta esta orientado en un ángulo β con respecto al eje de esfuerzo (figura I-2.5a). Si β ≠ 0 , la
grieta estará sometida a cargas combinadas de Modo I y Modo II; KIII=0 ya que el eje del
esfuerzo y la normal a la grieta están en el plano de la placa. Si se redefine el eje coordenado
de manera que coincida con la orientación de la grieta (figura I-2.5b), se puede observar que el
esfuerzo aplicado puede ser descompuesto en componentes normal y cortante. El esfuerzo
normal al plano de la grieta, σ2’2’, produce carga únicamente en Modo I, mientras τ1’2’ aplica
carga de Modo II a la grieta. Los factores de intensidad de esfuerzos para la placa de la figura
I-2.5 pueden ser deducidos relacionando σ2’2’ y τ1’2’ con σ y β a través del círculo de Mohr:
K I = σ 2 '2 ' πa = σ cos 2 (β) πa
(I-2.11a)
K II = τ 2'1' πa = σ sen (β) cos(β) πa
(I-2.11b)
Nótese que las ecuaciones (I-2.11) se reducen a Modo I únicamente cuando β = 0. El máximo
KII se produce para β = 45°, donde el esfuerzo cortante es también máximo.
(a)
(b)
σ2`2`
τ2`1`
(c)
τ1`2`
2a
β
2a
σ1`1`
x2´
x2
x1´
x1
Figura I-2.5 Grieta central en placa infinita para el caso general donde el esfuerzo principal no es perpendicular
al plano de la grieta.
Relación entre K y G
Hasta ahora se han introducido dos parámetros que describen el comportamiento de las
grietas: la tasa de disipación de energía G y factor de intensidad de esfuerzos K. La tasa de
disipación de energía cuantifica el cambio neto en la energía potencial que acompaña el
crecimiento de la grieta y el factor de intensidad de esfuerzos caracteriza los esfuerzos, las
44
deformaciones y los desplazamientos cerca del vértice de la grieta. El parámetro G describe un
comportamiento global mientras que K es un parámetro local. En materiales elásticos lineales
G y K se relacionan de manera única.
Para una placa infinita sometida a esfuerzos uniformes de tensión, G y K están dados
por las ecuaciones (I-2.4a) y (I-2.9). La relación entre la tasa de disipación de energía G y
factor de intensidad de esfuerzos K se obtiene combinando ambas ecuaciones, lo que resulta
en:
K 2I
G=
E
(I-2.12)
Esta expresión a pesar de haber sido deducida para el caso de una grieta interna, como se
puede estudiar en Anderson (1995) es una relación general para problemas de esfuerzos planos
que puede ser aplicada a cualquier configuración.
45
Capítulo I-3
Método de los elementos de contorno
El método de los elementos de contorno (MEC) es una técnica computacional que ha
emergido como una alternativa poderosa al método de los elementos finitos (MEF) en casos en
los que es requerida mayor precisión debido a problemas como concentraciones de esfuerzo o
donde el dominio se extiende al infinito. La característica más importante de los elementos de
contorno es que solo requiere discretización de la superficie en lugar del volumen. Esta
ventaja es particularmente importante en el diseño de procesos que involucran series de
modificaciones que son más difíciles de llevar a cabo usando el método de los elementos
finitos. Las mallas puede ser generadas fácilmente y los cambio de diseño no requieren un
remallado completo. Otra ventaja del método consiste en que reduce la dimensión del
problema en un grado. Estas dos ventajas conducen a un sistema de ecuaciones más pequeño y
a una reducción de los datos requeridos para el análisis.
La principal ventaja del MEC está relacionada a su mayor complejidad en la
formulación matemática. Esto proporciona un alto grado de versatilidad y precisión en códigos
bien escritos.
Ya que la formulación del método de los elementos de contorno se basa en soluciones
fundamentales que satisfacen las ecuaciones diferenciales que gobiernan el problema, la
aproximación de las variables es requerida solamente en el contorno mediante la solución
numérica de la ecuación integral de contorno. Una vez que esta integral ha sido resuelta, se
tienen identidades explícitas que permiten la determinación precisa de los valores en los
puntos interiores del dominio.
El MEC es especialmente ventajoso en soluciones de problemas de mecánica de la
fractura que involucran un gradiente alto de esfuerzos y muy útil en el modelado de la
propagación de grietas.
I-3.1. Soluciones Fundamentales
La formulación de las ecuaciones integrales de contorno que se describirán en la
siguiente sección requiere el conocimiento de la solución de problemas elásticos con las
46
mismas propiedades del material del cuerpo en consideración, pero correspondiente a un
dominio infinito solicitado con una carga concentrada unitaria puntual. Esta es la llamada
solución fundamental en el caso estático elástico y es denominada solución de Kelvin.
Si las ecuaciones de equilibrio (I-1.11) se expresan en términos de las componentes de
desplazamiento se obtienen las ecuaciones de Navier. Para ello considérese la ecuación:
σ lj, j + b l = 0
(I-3.1)
Sustituyendo en esta ecuación la relación esfuerzo-deformación (I-1.33b):
⎡ ν
⎤
σ lj = 2µ ⎢
δ ljε mm + ε lj ⎥
⎣1 − 2ν
⎦
(I-3.2)
y la ecuación desplazamiento-deformación (I-1.25):
ε lj =
1
(u l, j + u j,l )
2
(I-3.3)
el resultado son las ecuaciones de Navier o ecuaciones de equilibrio en términos de
desplazamientos:
1
⎛ 1 ⎞
⎜
⎟u j, jl + u l, jj + b l = 0
µ
⎝ 1 − 2ν ⎠
(I-3.4)
La solución de Kelvin es obtenida de la ecuación (I-3.4) cuando se aplica una carga unitaria en
un punto ‘i’ en la dirección del vector unitario el,
b l = ∆i e l
(I-3.5)
∆ indica la función Delta Dirac tal que:
47
xi +ε
⎧
∆i dx = 1
singular
en
el
punto
x
con
⎪
i
∫
∆i ⎨
x i −ε
⎪
= 0 en cualquier otro punto
⎩
(I-3.6)
El cálculo de la solución fundamental se puede realizar utilizando la representación de
los desplazamientos en términos del vector de Galerkin. Se supone la existencia de un vector
G del cual se obtienen los componentes de desplazamientos como:
u j = G j,mm −
1
G m, jm
2(1 − ν)
(I-3.7)
Sustituyendo las ecuaciones (I-3.5) y (I-3.7) en la ecuación (I-3.4) se obtiene:
G l,mmjj +
1 i
∆ el = 0
µ
(I-3.8)
o
∇ 2 (∇ 2 G l ) +
1 i
∆ el = 0
µ
(I-3.9)
Esta ecuación puede ser escrita como:
1
∇ 2 (Fl ) + ∆i e l = 0
µ
donde:
(I-3.10)
Fl = ∇2 Gl
(I-3.11)
para el caso tridimensional
(I-3.12)
La solución de la ecuación (I-3.10) es:
Fl =
1
el
4πrµ
y
48
Fl =
1
⎛1⎞
ln⎜ ⎟e l para el caso bidimensional
2πµ ⎝ r ⎠
(I-3.13)
r es la coordenada radial utilizando como origen del sistema de coordenadas el punto de
aplicación de la carga. Sustituyendo (I-3.12) o (I-3.13) en (I-3.11) se obtienen las soluciones:
G l = G.e l
(I-3.14)
donde:
G=
1
r para el caso tridimensional
8πµ
(I-3.15)
G=
1 2 ⎛1⎞
r ln⎜ ⎟ para el caso bidimensional
8πµ
⎝r⎠
(I-3.16)
y
Considerando cada carga independientemente, se puede escribir:
G lk = Gδ lk
(I-3.17)
Donde Glk es la k-ésima componente del vector de Galerkin en cualquier punto cuando una
carga unitaria es aplicada en el punto ‘i’ en la dirección l. El desplazamiento en cualquier
punto del dominio producido por la carga puntual considerando cada dirección
independientemente es:
u *k = u *lk e l
(I-3.18)
Donde u *lk representa los desplazamientos en cualquier punto en la dirección k cuando una
carga unitaria es aplicada en la dirección l.
49
Escribiendo los desplazamientos como la ecuación (I-3.7) en el caso tridimensional
resulta:
u *lk =
1
[(3 − 4ν)δ lk + r,l r,k ]
16πµ(1 − ν)r
(I-3.19)
donde:
r,l =
∂r
∂r
; r,k =
∂x l
∂x k
(I-3.20)
Estas son los relaciones entre la proyección de r en las direcciones x1, x2 y x3, que se llaman r1,
r2 y r3 y la longitud r, como se puede ver en la figura I-3.1.
Punto en la superficie
r
r
r3
punto i
r1
r2
Figura I-3.1. Componentes del vector de distancia r
En problemas de deformaciones planas la solución fundamental en términos de
desplazamientos es:
50
u *lk =
1
1
[(3 − 4ν) ln δ lk + r,l r,k ]
8πµ(1 − ν )
u
(I-3.21)
Si en el dominio infinito se recorta un subdominio de forma arbitraria alrededor del punto de
aplicación de la carga, aparecen fuerzas de superficie o tracciones en el contorno Γ del
r
subdominio cuya normal es n . Estas componentes en el caso tridimensional son:
p *lk =
1
⎡ ∂r
⎤
[(1 − 2ν)δ lk + 3r,l r,k ] + (1 - 2ν)(n l r,k − n k r,l )⎥
2 ⎢
8π(1 − ν)r ⎣ ∂n
⎦
(I-3.22)
p*lk es la tracción en cualquier punto en la dirección k cuando una carga unitaria es aplicada en
la dirección l, nl y nk son los cosenos directores de la normal con respecto a xl y xk. ∂r/∂n es la
derivada del vector de distancia r con respecto a la normal. En el caso de problema de
esfuerzos planos se tiene:
p *lk =
1
⎡ ∂r
⎤
[(1 − 2ν)δ lk + 2r,l r,k ] + (1 - 2ν)(n l r,k − n k r,l )⎥
⎢
4π(1 − ν)r ⎣ ∂n
⎦
(I-3.23)
I-3.2. Formulación de la integral de contorno
El Teorema de los Trabajos Virtuales, en el caso estático en notación matricial tiene la
siguiente expresión:
∫σ
Ω
t
ε *dΩ = ∫ b t u * dΩ + ∫ p t u *dΓ + ∑ f u *
t
Ω
(I-3.24)
Γ
El término de la izquierda representa el trabajo de las fuerzas internas, el primer término de la
derecha el trabajo de las fuerzas de volumen, el segundo término el de las fuerzas de superficie
y el tercero el trabajo de las fuerzas externas.
La ley de comportamiento en el caso elástico es:
51
En el problema real :
σ = Cε
En el problema virtual :
σ * = Cε *
El problema virtual es arbitrario pero se aplica al mismo material y a la misma geometría del
problema real por lo que:
∫ σ ε dΩ = ∫ ε Cε dΩ = ∫ ε σ dΩ
t *
t
Ω
*
Ω
t
*
(I-3.25)
Ω
Aplicando el Teorema de los Trabajos Virtuales en el problema virtual pero considerando los
desplazamientos del problema real tenemos:
∫σ
Ω
*t
ε dΩ = ∫ (b * ) t u dΩ + ∫ (p * ) t u dΓ + ∑ (f * ) t u
Ω
(I-3.26)
Γ
Igualando (I-3.24) y (I-3.26) queda:
∫ b u dΩ + ∫ p u dΓ + ∑ f u = ∫ (b ) u dΩ + ∫ (p ) u dΓ + ∑ (f
t
Ω
*
t
*
Γ
t
*
* t
Ω
* t
* t
)u
(I-3.27)
Γ
Este es conocido como el teorema de reciprocidad de Maxwell-Betti e indica que el trabajo de
las fuerzas reales sobre los desplazamientos virtuales es igual al trabajo de las fuerzas virtuales
sobre los desplazamientos reales.
Identidad de Somigliana
La identidad de Somigliana es un caso particular del teorema de reciprocidad de
Maxwell-Betti, en el cual se toma como problema virtual el problema fundamental descrito en
la sección I-3.1. Como allí se indica, el problema fundamental consiste en una placa infinita a
la que se aplica una fuerza unitaria concentrada en cualquier dirección. Esta fuerza produce
desplazamientos y fuerzas o tracciones que para el caso isótropo pueden ser calculadas con las
ecuaciones (I-3.19) a (I-3.23). En este caso se tiene que p*=1, que es la fuerza aplicada, b*= 0
52
ya que no existen fuerzas de volumen y p* se calcula con (I-3.22) o (I-3.23). La identidad de
Somigliana es:
u i = ∫ b t u * dΩ + ∫ p t u * dΓ + ∑ f t u * − ∫ (p * ) t u dΓ
Ω
Γ
(I-3.28)
Γ
Considerando las siguientes condiciones de contorno:
u=u
en Γ1
p = σn = p
en Γ2
(I-3.29)
Donde los términos con barra representan valores conocidos. La identidad de Somigliana se
expresa como:
u i = ∫ b t u *dΩ + ∫ p t u * dΓ + ∫ p t u * dΓ + ∑ f t u * − ∫ (p * ) t u dΓ − ∫ (p * ) t u dΓ (I-3.30)
Ω
Γ1
Γ2
Γ1
Γ2
Nótese que cuando se aplica una carga concentrada unitaria en una dirección particular l, en el
punto de aplicación solo se producen desplazamientos a lo largo de la dirección de la carga
mientras que las tracciones y los desplazamientos en cualquier punto del domino tienen
componentes en tres o dos direcciones. La identidad de Somigliana da los valores de los
desplazamientos en cualquier punto interno ‘i’ en función de los desplazamientos uk y las
tracciones pk en el contorno, las fuerzas en el dominio y la solución fundamental conocida.
Puntos del contorno
Con la identidad de Somigliana se pueden obtener los desplazamientos en cualquier
punto interno una vez conocidos uk y pk en todos los puntos del contorno. En consecuencia,
solo se pueden calcular los puntos internos cuando se ha resuelto el problema de contorno. Sin
embargo, ya que la ecuación (I-3.30) es válida en cualquier punto del dominio Ω incluyendo el
contorno Γ, se puede obtener una integral de contorno evaluando (I-3.30) en Γ. Esta expresión
53
es aplicada en diferentes puntos del contorno generando un sistema de ecuaciones que una vez
resuelto da los valores del contorno.
Sin embargo cuando el punto ‘i’ es tomado en el contorno, las integrales tienen una
singularidad y es necesario analizar su comportamiento de manera especial. Si se considera
que el contorno es continuo en ‘i’ se puede suplementar el contorno con una semiesfera de
radio ε en el caso tridimensional como se muestra en la figura I-3.2a o con un semicírculo en
el caso bidimensional (I-3.2b). Se considera que el punto ‘i’ está en el centro de la semiesfera
o del semicírculo. Se tienen dos tipos de integrales de contorno, las integrales sobre Γ1 y las
integrales sobre Γ2. Por simplicidad se analiza la ecuación (I-3.28) sabiendo que Γ = Γ1 + Γ2.
Se saca el límite de estas integrales considerando que ε → 0 y se obtiene la siguiente
expresión para analizar los puntos de un contorno continuo:
1 i
u = ∫ b t u * dΩ + ∫ p t u * dΓ + ∑ f t u * − ∫ (p * ) t u dΓ
2
Ω
Γ
Γ
(I-3.31)
La deducción en detalle de esta expresión puede ser estudiada en Brebbia y Domínguez
(1989).
(b)
(a)
Superficie Γε
Curva de contorno Γε
n
r=ε
n
Punto del contorno
Curva de contorno Γ
Punto del contorno
r=ε
Superficie de contorno
Figura I-3.2. Aumento del contorno para el análisis de puntos de superficie en el caso (a) tridimensional y (b)
bidimensional. (Brebbia y Domínguez (1989))
I-3.3. Método de los Elementos de Contorno
Con la finalidad de resolver la ecuación integral, el contorno del cuerpo debe ser
discretizado en una serie de elementos sobre los cuales se plantean las ecuaciones de
54
desplazamientos y tracciones en términos de sus valores en una serie de puntos nodales. Como
ejemplo se puede considerar por simplicidad, un cuerpo bidimensional. El contorno del cuerpo
es dividido en N segmentos o elementos como se muestra en las figuras I-3.3. y I-3.4. Los
puntos donde los valores son desconocidos se llaman ‘nudos’. Existen varios tipos de
elementos como los llamados elementos constantes en los cuales los nudos se ubican en el
medio del elemento (figuras I-3.3a y I-3.4a), los elementos lineales en los cuales los nudos se
ubican en los extremos (figura I-3.3b y I-3.4b) y los elementos curvos, como los cuadráticos
mostrados en la figura I-3.3c y I-3.4c en los cuales es requerido un nudo en el centro del
elemento además de los nudos extremos. Se escribe la forma discretizada de la ecuación (I3.31) para cada punto nodal y se obtiene un sistema de ecuaciones lineales. Una vez que se
aplican las condiciones de borde, el sistema puede ser resuelto obteniéndose los valores
desconocidos y en consecuencia una solución aproximada al problema de valores de contorno.
(a) Elementos constantes
elementos
nudos
nudos
(b) Elementos lineales
elementos
nudos
(c) Elementos cuadráticos
elementos
Figura I-3.3. Tipos de elementos de contorno en 2D: (a) Elementos constantes, (b) Elementos lineales,
(c) Elementos cuadráticos. (Brebbia y Domínguez (1989))
55
Elementos de
contorno
nudos
nudos
Elementos de
contorno
(a) Elementos constantes
x3
(b) Elementos lineales
nudos
Elementos de
contorno
x2
x1
(c) Elementos cuadráticos
Figura I-3.4. Tipos de elementos de contorno en 3D: (a) Elementos constantes, (b) Elementos lineales,
(c) Elementos cuadráticos. (Brebbia y Domínguez (1989))
Sobre cada elemento ‘j’ actúan funciones u y p que se definen como:
u = Φu j
(I-3.32)
p = Φp j
(I-3.33)
y
uj y pj son los desplazamientos y tracciones nodales del elemento, de dimensión 3Q para tres
dimensiones y 2Q en el caso bidimensional, siendo Q el número de nudos del elemento. u y p
son los desplazamientos y las tracciones en cualquier punto del contorno Γe, es decir:
⎧ p1 ⎫
⎪⎪ ⎪⎪
p = ⎨p 2 ⎬;
⎪ ⎪
⎩⎪p 3 ⎭⎪
⎧ u1 ⎫
⎪⎪ ⎪⎪
u = ⎨u 2 ⎬
⎪ ⎪
⎩⎪u 3 ⎭⎪
(I-3.34)
56
Φ es una matriz de funciones de interpolación que es un arreglo de funciones de forma de
dimensiones 3 x 3Q en 3D y 2 x 2Q en 2D.
⎡φ1
⎢
Φ=⎢0
⎢0
⎣
0
φ1
0
0
φ2
0
0
φ2
0
0
L φQ
L 0
0
φQ
0
φ1
0
0
φ2 L
0
0
⎤
⎥
⎥ = [Φ 1
φ Q ⎥⎦
0
0
Φ2
L ΦQ ]
(I-3.35)
Estas son las funciones estándares en dos dimensiones usadas en el método de los elementos
finitos.
Las fuerzas de volumen en cualquier punto del dominio pueden ser expresadas en
forma vectorial en función de las tres componentes,
⎧ b1 ⎫
⎪⎪ ⎪⎪
b = ⎨b 2 ⎬
⎪ ⎪
⎪⎩b 3 ⎪⎭
(I-3.36)
Los coeficientes de la solución fundamental se pueden expresar como:
*
⎡ p11
⎢
p * = ⎢p *21
⎢
⎢ p*31
⎣
*
p12
p *22
p *32
⎡u11* u12*
*
*
u* = ⎢⎢u21
u22
*
*
⎢⎣u31
u32
Matriz cuyos coeficientes, p*lk , son las
*
⎤
p13
⎥
tracciones en la dirección k debido a una
p *23 ⎥ =
⎥
fuerza unitaria actuando en ‘i’ en la dirección
* ⎥
p 33 ⎦
‘l’.
(I-3.37a)
Matriz cuyos coeficientes, u *lk , son los
u13* ⎤
* ⎥
desplazamientos en la dirección k debido a una
u23
⎥ =
*
u33 ⎥⎦
fuerza unitaria actuando en ‘i’ en la dirección
(I-3.37b)
‘l’
La interpretación geométrica de estas componentes se muestra en la figura I-3.5.
57
(a)
x3,u3
Superficie Γ
(b)
r
n
x1,u1
r
r
x2,u2
x3,u3
(c)
*
u13
r
r
Punto i de
aplicación
de la carga
x3,u3
*
u11
Punto i
x1,u1
p*23
r
r
*
u12
p*22
Punto i
x2,u2
Carga unitaria aplicada
en la dirección x1
p*21
x1,u1
x2,u2
Carga unitaria aplicada
en la dirección x2
Figura I-3.5. Interpretación geométrica de las componentes de las soluciones fundamentales. (a) Definición
geométrica, (b) Componentes de desplazamiento de la solución fundamental, (c) Componentes de tracción de la
solución fundamental. (Brebbia y Domínguez (1989))
Nótese que las coordenadas cartesianas del contorno también pueden ser escritas en
términos de las coordenadas nodales para definir elementos curvos. En este caso es necesario
realizar la transformación de un sistema en otro para lo cual deben ser calculados dos
Jacobianos como se muestra en la siguiente sub-sección.
Sustituyendo las funciones de interpolación en la ecuación (I-3.31), sin considerar
fuerzas externas y discretizando el contorno se obtiene la siguiente expresión para un punto
nodal:
M ⎧
NE ⎧
⎫⎪
⎫⎪
⎫⎪ NE ⎧⎪
⎪
⎪
c (i) u i = ∑ ⎨ ∫ b t u *dΩ⎬ + ∑ ⎨ ∫ (u * ) t Φ dΓ ⎬ p j − ∑ ⎨ ∫ (p * ) t Φ dΓ ⎬ u j
⎪⎭ j=1 ⎪⎩Γ j
s =1 ⎪
j=1 ⎪Γ j
⎪⎭
⎪⎭
⎩Ω s
⎩
(I-3.38)
Donde ci = ½ para contornos continuos . En cualquier otro caso será un arreglo de 3 x 3 en el
caso tridimensional o de 2 x 2 en el bidimensional. La sumatoria en el contorno se realiza
sobre el número total de elementos NE. Γj es la superficie del elemento ‘j’, uj y pj son el
desplazamiento y la tracción nodal en el mismo. El dominio se divide en M celdas internas
sobre las cuales se calculan las integrales de volumen. Las funciones de interpolación Φ se
suelen expresar en un sistema coordenado como el mostrado en la figura I-3.6. Las
coordenadas deben ser transformadas del sistema ξi al sistema global xi.
58
ξ2
n
ξ1
x3
r
r
x2
x1
Figura I-3.6. Sistema de ejes coordenados para un elemento de superficie curvo
Transformación de coordenadas
La transformación de volumen en volumen es:
dΩ = J dξ1dξ 2 dη
(I-3.39)
La transformación de superficie en volumen es:
dΓ = G dξ1dξ 2
(I-3.40)
Para calcular los Jacobianos J y G es necesario conocer la variación de las coordenadas xi en
función del sistema dξ1dξ 2 η que está dada en términos de las mismas funciones de
interpolación usadas para los desplazamientos y las tracciones (ecuaciones I-3.32 y I-3.33),
esto es: x = Φx j . xj son los valores nodales de las coordenadas sobre el elemento en
consideración y Φ es la función de interpolación descrita anteriormente.
Introduciendo (I-3.39) y (I-3.40) en (I-3.38) y realizando una integración numérica resulta:
59
M ⎧ r
⎫ NE ⎧ l
⎫
c (i) u i = ∑ ⎨∑ w p ((u * ) t b * ) p J ⎬ + ∑ ⎨∑ w k ((u * ) t Φ) k G ⎬ p j
s =1 ⎩ p =1
⎭
⎭ j=1 ⎩ k =1
NE
l
⎧
⎫
− ∑ ⎨∑ w k ((p * ) t Φ) k G ⎬u j
j=1 ⎩ k =1
⎭
(I-3.41)
Donde l es el número de puntos de integración en la superficie de los elementos y wk el peso
en esos puntos, r es el número de puntos de integración en las celdas.
Sistema de ecuaciones
La ecuación (I-3.41) corresponde a un nudo particular ‘i’ y una vez integrada se puede
escribir:
M
N
N
s =1
j=1
j=1
ˆ ij u j
c (i) u i = ∑ B is + ∑ G ij p j − ∑ H
(I-3.42)
Donde N es el número de nudos, uj y pj son los desplazamientos y las tracciones en el nudo ‘j’.
Las matrices H y G son:
ˆ ij = ∑ (p * ) t Φ dΓ
H
q
∫
t Γ1
G ij = ∑ ∫ (u * ) t Φ q dΓ
(I-3.43)
t Γ1
La sumatoria corresponde a todos los elementos a los cuales pertenece el nudo ‘j’ y q es el
número que corresponde al orden del nudo j en el elemento t.
Si se llama:
ˆ ij
H ij = H
si i = j
ˆ ij + c i
H =H
si i ≠ j
ij
(I-3.44)
Para el nudo ‘i’ la ecuación (I-3.42) se convierte en:
60
N
M
N
j=1
s =1
j=1
∑ H ij u j = ∑ B is + ∑ G ij p j
(I-3.45)
En forma matricial el sistema global de ecuaciones se escribe:
HU = GP + B
(I-3.46)
Los vectores U y P representan todos los valores de desplazamientos y tracciones antes de
aplicar las condiciones de contorno. Estas condiciones pueden ser introducidas haciendo un
intercambio de las columnas en H y G, pasando las cantidades desconocidas al vector X en el
lado izquierdo de la ecuación. Así se obtiene el sistema final de ecuaciones:
AX = F
(I-3.47)
B se incorpora a F. Resolviendo el sistema de ecuaciones se obtienen todos los valores del
contorno.
Puntos internos
El desplazamiento de cualquier punto interno en términos de los desplazamientos y
tracciones del contorno se puede calcular con la ecuación (I-3.38),
NE ⎧
M ⎧
⎫⎪
⎫⎪
⎫⎪ NE ⎧⎪
⎪
⎪
u i = ∑ ⎨ ∫ b t u *dΩ⎬ + ∑ ⎨ ∫ (u * ) t Φ dΓ ⎬ p j − ∑ ⎨ ∫ (p * ) t Φ dΓ ⎬ u j
⎪⎭ j=1 ⎪⎩Γ j
j=1 ⎪Γ j
s =1 ⎪
⎪⎭
⎪⎭
⎩Ω s
⎩
(I-3.48)
Donde Γj es la superficie correspondiente al elemento ‘j’ e ‘i’ es en este caso un punto interno
del dominio.
61
Capítulo I-4
Teoría de plasticidad
La teoría de plasticidad es una rama de la mecánica que se ocupa del cálculo de los
esfuerzos y las deformaciones en un cuerpo de material dúctil, en el cual se producen
deformaciones permanentes como consecuencia de las cargas aplicadas. La teoría se basa en
observaciones experimentales del comportamiento de metales sometidos a estados de
esfuerzos combinados. Los resultados observados son idealizados en formulaciones
matemáticas que permiten describir el comportamiento de metales sujetos a esfuerzos
complejos. A diferencia de los sólidos elásticos, en los cuales el estado de deformación
depende solo del estado final de esfuerzo, la deformación que se produce en un sólido plástico
se determina a partir de la historia completa de solicitaciones.
En metales dúctiles, bajo condiciones favorables, las deformaciones plásticas pueden
tener una extensión considerable sin que se produzca la falla por fractura. En muchos procesos
de trabajo con metales se producen grandes deformaciones plásticas. Mientras que las
deformaciones elásticas pueden ser ignoradas en estos casos, en el tratamiento teórico se debe
considerar el cambio continuo en la geometría de la pieza. En numerosos problemas
estructurales en los cuales las cargas se aumentan mas allá del límite elástico, se producen
situaciones en las cuales las deformaciones elásticas y plásticas son similares en magnitud.
Los diseños estructurales basados en la estimación de las cargas de colapso son más
económicos que los diseños elásticos debido a que el método plástico toma total ventaja de la
ductilidad disponible del material.
I-4.1. Comportamiento uniaxial de sólidos elastoplásticos
En la figura I-4.1 se muestra una curva típica esfuerzo-deformación correspondiente a
un material dúctil sometido a tracción simple. La parte inicial de la curva OA corresponde a
una línea recta de pendiente E que es el módulo de Young. Hasta este momento, como el
esfuerzo es suficientemente pequeño, el material se comporta elásticamente y el espécimen
recupera su tamaño original una vez que se eliminan las cargas aplicadas. El punto A
representa el límite de proporcionalidad a partir del cual la relación esfuerzo-deformación deja
62
de ser lineal. Generalmente el rango elástico se extiende un poco más allá del límite de
proporcionalidad. Para la mayoría de los metales la transición del comportamiento elástico al
plástico es gradual debido a la cedencia sucesiva de los granos individuales de cristal. La
ubicación del punto de cedencia B es en consecuencia una convención. El esfuerzo
correspondiente σ y conocido como esfuerzo de cedencia se define generalmente como aquel
para el cual se observa una pequeña cantidad de deformaciones permanentes.
Más allá del límite de cedencia, el esfuerzo sigue aumentado continuamente
produciendo mayores deformaciones plásticas. En la curva BC se observa como la pendiente
de la curva esfuerzo-deformación, que representa la tasa de endurecimiento por deformación,
decrece de manera estable con el incremento del esfuerzo. Si el espécimen es cargado hasta un
punto C en el rango plástico y se elimina la carga, se produce una descarga elástica que sigue
la trayectoria CD muy parecida a una línea recta de pendiente E. La deformación permanente
que se obtiene al finalizar la descarga es igual a OE. Cuando se aplica carga de nuevo, el
espécimen se deforma elásticamente hasta que alcanza un nuevo punto de cedencia F. Si se
desprecia el lazo histerético angosto que se forma durante la carga y descarga, se puede
considerar que F coincide con C. A mayor carga, la curva esfuerzo-deformación sigue la
trayectoria FG, como una continuación virtual de la curva BC. La curva EFG puede ser
considerada como la curva esfuerzo-deformación del metal cuando está pre-deformado una
cantidad OE. A mayor grado de deformación previa, el punto de fluencia es mayor y la curva
de endurecimiento por deformación es más plana. Para un metal con deformaciones previas
muy altas, la tasa de endurecimiento por deformación es tan pequeña que se puede considerar
que el material no tiene endurecimiento o sea que es idealmente plástico.
Dominio Elástico
Se define el dominio elástico como el conjunto de valores de esfuerzo para los cuales
la respuesta es elástica. En la gráfica I-4.1, y en ausencia de deformaciones plásticas previas,
el dominio elástico es la zona comprendida entre (σy y -σy).
Efecto Baushinger
Supóngase que un espécimen que ha sido descargado totalmente desde un estado de
tensión plástico representado por el punto C, se recarga en compresión simple (figura I-1.4).
63
σ
C
G
F
A
B
σy
tan-1 E
O
D
E
ε
F’
G’
Figura I-4.1. Curva esfuerzo-deformación de metales con efectos de descarga y cargas reversibles
La curva esfuerzo-deformación seguirá la línea DF’, donde el nuevo punto de cedencia F’
corresponde a un esfuerzo que es apreciablemente de menor magnitud que el correspondiente
al punto C. Este fenómeno es conocido como el efecto Baushinger que ocurre en los metales
reales siempre que se produce un cambio de signo en las cargas aplicadas. El subsiguiente
endurecimiento por deformación sigue la trayectoria F’G’ y se aproxima a la curva esfuerzodeformación en compresión a medida que se sigue aplicando carga. El esfuerzo de cendencia
menor en cargas reversibles es causado principalmente por la existencia de esfuerzos
residuales que permanecen en el espécimen a escala microscópica debido a estados de
esfuerzos diferentes en los cristales individuales.
Idealizaciones de la curva esfuerzo-deformación
Cuando se realizan simulaciones numéricas es necesario representar una determinada
curva experimental esfuerzo-deformación mediante ecuaciones matemáticas. Las ecuaciones
cinemáticas y de equilibrio descritas en la sección I-1 siguen siendo válidas en el caso de que
el elemento incursione en el rango plástico. Por el contrario, es necesario plantear una nueva
ley de comportamiento que considere la existencia de deformaciones permanentes. Para ello se
64
introduce la variable interna ε p que conjuntamente con la deformación ε permite calcular el
esfuerzo σ de manera única. La expresión que permite este cálculo se llama ley de estado. Para
calcular la nueva variable es necesario plantear una nueva ecuación que es la ley de evolución
de ε p .
Existen diversos modelos que idealizan dicha curva algunos de estos cuales se
describen a continuación (Flórez-López (1999)).
Modelo Elastoplástico perfecto
Este modelo propone la siguiente ley de estado para relacionar esfuerzos con
deformaciones:
σ = E (ε − ε p )
(I-4.1)
donde E es el módulo de Young.
La ley de evolución de las deformaciones plásticas se plantea en términos de una
función de fluencia f = f (σ) que indica cuando hay o no plasticidad. Este modelo propone la
siguiente función de fluencia:
f ( σ) = σ − σ y ≤ 0
(I-4.2)
donde σ y es el esfuerzo de cedencia. La ley de evolución de ε p se define como:
⎧ε& p = 0 si f < 0 o f& < 0
⎪
⎨
⎪&
&
⎩ε p ≠ 0 si f = 0 y f = 0
(I-4.3)
(I-4.4)
La ecuación (I-4.3) indica que no hay incremento de la deformación plástica, o sea, que ε p se
mantiene constante, cuando la función de fluencia es negativa, lo que implica que el esfuerzo
65
es menor que el esfuerzo de cedencia o cuando el incremento de f es negativo, lo que ocurre
durante las descargas elásticas. La ecuación (I-4.4) implica que hay aumento de la
deformación plástica cuando el esfuerzo alcanza el valor del esfuerzo de cedencia y f no tiene
tendencia a disminuir, es decir, que no comience un proceso de descarga.
Con este modelo se obtienen curvas esfuerzo-deformación como la que se muestra en
la figura I-4.2a. Como se puede observar, este modelo no considera el efecto de
endurecimiento por deformación. En la figura I-4.2b se muestra la respuesta cíclica obtenida
con el modelo elastoplástico perfecto. En esta figura se puede observar que este modelo no
describe el efecto Baushinger ya que supone que el límite elástico es constante.
El modelo elastoplástico perfecto es adecuado para determinar capacidades resistentes
en términos de fuerzas pero es muy deficiente para describir procesos de falla como en el caso
de la ingeniería sísmica.
El conjunto formado por la ley de estado (I-4.1) y la ley de evolución de εp (I-4.3) y (I4.4) representa la ley de comportamiento uniaxial del modelo elastoplástico perfecto.
(b)
(a)
σ
σ
σy
σy
E
E
ε
E
ε
σy
Figura I-4.2. Curva esfuerzo-deformación obtenida con el modelo elastoplástico perfecto en el caso:
(a) monotónico, (b) cíclico
Modelo Elastoplástico perfecto con endurecimiento cinemático lineal
Este modelo fue propuesto por W. Prager (1955) quien supuso que el efecto
Baushinger se produce debido al desplazamiento del dominio elástico como consecuencia de
la plasticidad. Teniendo en cuenta que el dominio elástico es definido exclusivamente por la
66
función de fluencia, se conservan las leyes de estado (I-4.1) y las de evolución (I-4.3) y (I-4.4)
del modelo elastoplástico perfecto. Para ello propuso una nueva función de fluencia de la
forma:
f (σ, X) = σ − X − σ y ≤ 0
(I-4.5)
donde X representa la ubicación del centro del dominio elástico como se muestra en la figura
I-4.3. Cuando el endurecimiento es lineal se calcula como
X = cε p
(I-4.6)
donde c es una constante propiedad del material que se obtiene experimentalmente.
σy+X
X
Centro del
dominio elástico
X-σy
Figura I-4.3. Centro del dominio elástico
Considerando esta función de fluencia en las leyes evolución de la deformación plástica (I-4.3)
y (I-4.4) se obtiene el comportamiento mostrado en la figura I-4.4.
Para esfuerzos positivos, la plastificación en este modelo comienza cuando el esfuerzo
alcanza el valor de cε p + σ y (f es igual a cero), mientras que para esfuerzos negativos la
plasticidad ocurre cuando el esfuerzo es igual a cε p − σ y . El dominio elástico es por lo tanto
el conjunto de valores ( cε p + σ y , cε p − σ y ). Cuando la deformación plástica es nula, el
67
dominio elástico en ambos modelos es coincidente. La rama plástica definida por f = 0 en
ambos modelos, ahora es una recta inclinada cuya pendiente depende de la constante c.
σ
σy
ε
Figura I-4.4. Curva esfuerzo-deformación obtenida con el modelo elastoplástico perfecto considerando
endurecimiento cinemático en el caso cíclico (Modelo de Prager)
Como puede observarse este modelo permite representar el efecto Baushinger, pero no
impone límite al máximo esfuerzo que el material puede soportar.
Modelo Elastoplástico perfecto con endurecimiento isótropo
El modelo descrito en la sección precedente presenta el inconveniente respecto al
modelo elastoplástico perfecto de no limitar los esfuerzos admisibles del material. En el
modelo anterior el esfuerzo en el material puede aumentar indefinidamente si la constante c es
estrictamente positiva. Para solventar este inconveniente se introduce un término R(p) de
endurecimiento isótropo en la función de fluencia de la forma:
f (σ, X, R ) = σ − (σ y + R (p)) ≤ 0
(I-4.7)
Para el término de endurecimiento isótropo se considera una expresión no lineal de la forma:
R (p) = (σ u − σ y )(1 − e − αp )
(I-4.8)
68
Donde α es una propiedad del material y p es la deformación plástica acumulada que se define
como:
dp = | dε p |
(I-4.9)
Con la introducción del término de endurecimiento isótropo no lineal además de limitar el
esfuerzo en el material permite que el dominio elástico aumente su tamaño con la plasticidad.
La curva esfuerzo-deformación resultante se muestra en la figura (I-4.5).
σ
σu
σy
ε
σu
Figura I-4.5. Curva esfuerzo-deformación obtenida con el modelo elastoplástico perfecto considerando
endurecimiento isótropo no lineal en el caso cíclico
I-4.2. Vigas elastoplásticas y rótulas plásticas
Para describir el proceso de plastificación que se produce en una viga elastoplástica se
seguirá el esquema presentado por (Flórez-López (1999)). Para ello se presenta como ejemplo
la viga simplemente apoyada con una carga concentrada en el centro que se muestra en la
figura I-4.6. La viga tiene una sección transversal rectangular de altura h. Se supone que el
material de la viga obedece la ley de comportamiento elastoplástica perfecta descrita
anteriormente y que se cumplen las hipótesis de Euler-Bernoulli. Estas hipótesis suponen que
69
las secciones transversales se mueven como cuerpo rígido y que permanecen perpendiculares
al eje neutro durante el movimiento.
P
h
L
L
X
P.L/2
M
Figura I-4.6. Viga simplemente apoyada sometida a una carga concentrada en el centro
A medida que la carga concentrada P aumenta, la sección central de la viga pasa por
los diferentes estados de esfuerzo normal y de deformaciones unitarias que se presentan en la
figura I-4.7.
X
(a)
ε
σ
my
mP
σy
X
(b)
ε
my
mP
σ
σy
X
(c)
my
mP
ε
my
mP
σy
σ
σy
X
(d)
σy
σy
σ
σy
σy
Figura I-4.7. Evolución de los esfuerzos y deformaciones en la sección central de la viga (a) m < my ;
(b) m = my ; (c) my < m < mp ; (c) m = mp
70
En la figura I-4.7a se presenta la distribución de esfuerzos y deformaciones
correspondientes a un valor de momento menor a my. En la figura I-4.7b se muestra la
distribución correspondiente al valor de momento my que produce el máximo esfuerzo σy de
tracción y compresión en las fibras extremas de la sección mas solicitada. En este momento,
solo las fibras extremas se plastifican. Si la carga es monotónica creciente, esta sería la última
distribución de esfuerzos elásticos en esta sección. La figura I-4.7c muestra la distribución de
esfuerzos para un momento superior a my. Como se puede observar en esa figura, existe una
zona de la sección transversal en la cual el esfuerzo normal es igual al esfuerzo de fluencia σy.
Esta zona se denomina “zona plástica” y comprende el conjunto de fibras que se plastifican.
Al aumentar la carga, aumenta el tamaño de la zona plástica hasta que alcanza la distribución
de esfuerzos que se muestra en la figura I-4.7d. En este estado se ha producido la
plastificación de toda la sección transversal y es alcanzada la resistencia máxima a flexión m =
mp. Este último valor se denomina momento plástico. Durante este proceso se produce una
curva momento-curvatura como la que se muestra en la figura I-4.8. El proceso de fluencia
sucesiva de fibras que produce cambios en los esfuerzos soportados por las fibras a medida
que el momento flector aumenta, se conoce como plastificación.
m
mp
my
EI
χ
Figura I-4.8. Curva momento-curvatura en la sección central de la viga.
Para valores inferiores a my existe una relación lineal entre el momento y la curvatura
de pendiente EI (módulo de Young multiplicado por el momento de inercia). A partir de este
valor, se produce una disminución de la pendiente de la tangente a la curva la cual tiende
asintóticamente a cero cuando la curvatura tiende a infinito. Cuando esto ocurre el momento
71
tiende a mp. Esta disminución de la pendiente es consecuencia de la propagación de la zona
plástica a lo largo de la sección transversal.
De manera simultánea al aumento de la zona plástica en la sección transversal, se
produce un proceso de plastificación a lo largo de la longitud de la viga tal y como se muestra
en la figura I-4.9.
Cuando el momento en el centro de la viga tiende al momento de fluencia, la curvatura
aumenta considerablemente en esta sección, de hecho tiende a infinito, mientras que se
mantiene proporcional al momento flector en la zona sin deformaciones plásticas. La zona de
deformaciones importantes se mantiene en muchos casos muy localizada.
Zona plástica
X
my
Zona elástica
mp
P
σy
σ
σy
Sección central
X
χ
Figura I-4.9. Distribución de momentos, zona plástica y curvaturas a lo largo de la viga
En el caso general, realizar este tipo de análisis cuantitativo no siempre es posible y es
necesario recurrir a métodos numéricos como el Método de los Elementos Finitos. El análisis
numérico de estas estructuras elastoplásticas requiere la discretización del miembro tanto
transversal como longitudinalmente para poder reproducir numéricamente la progresión de la
zona plástica a lo largo del eje neutro y de la sección transversal del miembro. Por esta causa,
aunque la teoría de vigas elásticas es unidimensional, la teoría de vigas elastoplásticas no lo
es.
72
Rótula Plástica
El uso de la curva exacta momento-curvatura (Figura I-4.8) en el análisis de estructuras
más allá del límite elástico requiere de un proceso iterativo. Sin embargo, este proceso
iterativo puede ser eliminado y el proceso de solución drásticamente simplificado mediante el
uso de la relación momento-curvatura idealizada por dos líneas rectas representadas por:
m = EIΦ
(0 < m < m p )
m = mp
(m > m p )
(I-4.10)
Las relaciones (I-4.10) se han graficado en la figura I-4.10. Estas relaciones equivalen a
suponer que el comportamiento es elástico mientras m < mp y cuando m > mp la sección esta
totalmente plastificada.
m
mp
my
EI
Curva exacta
Curva aproximada
χ
Figura I-4.10. Curva aproximada momento-curvatura
En el caso particular de una viga simplemente apoyada, la gráfica de momentos, la
zona plástica y la distribución aproximada de curvaturas se muestra en la figura I-4.11. Como
se puede observar en esta figura, solo una sección soporta el momento máximo mp. La
distribución de momentos coincide con la de la teoría exacta puesto que el problema es
isostático. En la distribución de curvaturas se produce una discontinuidad en la sección central
ya que según el modelo aproximado, para m = mp, el valor de la curvatura es arbitrario.
Este modelo aproximado sería válido y considerablemente más simple que la teoría
exacta, si no existiesen diferencias significativas entre uno y otro en el cálculo de las
rotaciones y flechas. En la teoría de vigas, la rotación relativa entre dos secciones corresponde
73
al área bajo el diagrama de distribución de curvaturas a lo largo del eje X. Tal y como puede
constatarse, en la teoría exacta (figura I-4.9) se produce un aumento acusado de la rotación
relativa en las zonas plásticas. De hecho, la rotación relativa aumenta indeterminadamente
cuando el momento en la sección central se acerca a mp y la curvatura tiende a infinito. A su
vez, la flecha se calcula midiendo el área bajo el diagrama de rotaciones, lo que implica que el
mismo fenómeno se presenta también para esta variable. Como en el modelo aproximado la
curvatura aumenta en una sola sección de la viga, el área bajo la gráfica de curvaturas de la
figura I-4.11 es la misma independientemente del valor que tome la curvatura en la sección
central. En consecuencia el modelo aproximado no puede representar la naturaleza física del
fenómeno de plastificación en lo que a desplazamientos y rotaciones se refiere.
X
Zona plástica
Zona elástica
mp
P
σ
σ
Sección central
Otras secciones
X
χ
Figura I-4.11. Distribución de momentos, zona plástica y curvaturas aproximadas
Con el fin de representar los fenómenos observados con la teoría elástica, se colocará
en la sección de máximo momento un resorte a flexión que experimentará rotaciones
permanentes únicamente cuando el momento alcance el valor de mp. Este resorte se llamará
“rótula plástica” y se supone de longitud nula.
El comportamiento de la rótula plástica se describe en función del momento y la
rotación. La ley de comportamiento para la rótula plástica se expresa empleando de nuevo una
74
función de fluencia como en los modelos uniaxiales descritos en la sección I-4.1. En el caso de
una rótula plástica perfecta la función de fluencia es:
f ( m) = m − m p
(I-4.11)
La rotación de una rótula plástica se denomina rotación plástica y se calcula mediante la
siguiente ley de evolución:
θ& p = 0
θ& p ≠ 0
si
si
f < 0 o f& < 0
f = 0 y f& = 0
(I-4.12)
donde θp es la rotación plástica de la rótula. La ley de evolución de la rótula plástica perfecta
genera el diagrama momento-rotación mostrado en la figura I-4.12 y la rotación plástica de la
rótula tiene la interpretación indicada en la figura I-4.13.
m
mP
θp
-mp
Rótula plástica
Figura I-4.12. Relación momento-rotación en una rótula plástica perfecta
Z on
ae
lá st
a
Z on
i ca
elá s
ti c a
θp
Figura I-4.13. Interpretación de la rotación plástica
75
Como se puede observar en la figura I-4.12, si el momento sobre la rótula es inferior al
momento plástico, mp, la rotación plástica es nula y el comportamiento es elástico. La
existencia de la rótula limita la capacidad del conjunto para soportar la fuerza concentrada P,
puesto que al alcanzarse el momento plástico en la sección central la rótula comienza a rotar
indefinidamente. Solo en estructuras hiperestáticas sería posible un aumento de la fuerza.
Adicionalmente al modelo perfectamente plástico se puede postular la existencia de
una rótula plástica con endurecimiento cinemático lineal añadiendo en la función de fluencia
el término correspondiente como las mostradas en las ecuaciones (I-4.5) y (I-4.6). En este caso
el comportamiento de la rótula plástica se puede observar en la figura I-4.14.
m
mp
c
θp
mp
Figura I-4.14. Comportamiento de una rótula plástica con endurecimiento cinemático lineal
Efecto de la carga axial
La aplicación de una compresión axial produce una distribución de esfuerzos normales
uniformes en la sección transversal. La adición de un momento flector a la fuerza axial de
compresión produce una variación lineal de los esfuerzos elásticos a lo largo de la sección
como se muestra en la figura I-4.15. Cuando se incrementa el momento flector manteniendo la
compresión axial constante, se produce una eventual plastificación de las fibras en la cara a
compresión de la sección seguida por la plastificación de las fibras de la cara en tensión y la
eventual plastificación total de la sección. La presencia de compresión axial reduce la
capacidad total a momento plástico de la sección. Esta reducción de la capacidad depende de
la magnitud de la carga axial.
La capacidad a momento plástico de una sección en presencia de carga axial puede ser
determinada de las condiciones de equilibrio como:
76
N = ∫ σdA
(I-4.13)
M = ∫ σydA
(I-4.14)
A
A
M
N
σ
σ
+
σy σy
σy
(M,N)e
σ
σy
=
σy
σy
σ
σy
σy
(M,N)u
σ
yo
σy
σy
Figura I-4.15. Distribución de esfuerzos bajo la acción combinada de momento flector y
fuerza axial de compresión
En una sección rectangular de ancho b y altura h con carga axial a compresión, el
diagrama de esfuerzo en la sección totalmente plastificada, consta de dos partes como se
muestra en la figura I-4.16. La carga axial Nu se supone soportada totalmente por la parte
central de la sección transversal esforzada hasta el límite de fluencia en compresión y el
momento flector Mu se supone resistido por las porciones superior e inferior esforzadas al
límite de fluencia en tensión en la base y en compresión en el tope. En este caso particular las
ecuaciones (I-4.13) y (I-4.14) toman la forma:
y0
N u = 2σ y ∫ b( x 2 )dx 2 = 2σ y by 0
(I-4.15)
0
77
⎡h4
⎤
M u = 2σ y ∫ x 2 b( x 2 )dx 2 = σ y b ⎢ − y o2 ⎥
⎣4
⎦
y0
h/2
(I-4.16)
h/2
M u = 2σ y
b
Nu
σ
(M,N)u
σ
h
∫x
2
b( x 2 )dx 2
yo
=
2yo
σy
Mu
σ
σy
+
σy σy
σy
σy
yo
N u = 2σ y ∫ b( x 2 )dx 2
0
Figura I-4.16. Distribución de esfuerzos en una sección rectangular totalmente plastificada
La extensión de la porción central 2yo puede ser determinada de la ecuación (I-4.15) como:
yo =
Nu
2σ y b
(I-4.17)
Sustituyendo (I-4.17) en (I-4.16) y considerando que N p = σ y A = σ y bh y que M p =
σ y bh 2
4
se obtiene la expresión adimensional para la capacidad reducida a momento plástico de la
sección rectangular como:
2
M u ⎛⎜ N u ⎞⎟
+
=1
M p ⎜⎝ N p ⎟⎠
(I-4.18)
La función de fluencia para una rótula plástica con carga axial se propone entonces
como:
78
⎛ N
f=
+⎜
M p ⎜⎝ N p
M
2
⎞
⎟ −1 ≤ 0
⎟
⎠
(I-4.19)
En consecuencia:
Si f < 0 o f& ≤ 0 ⇒ Comportamiento elástico
Si f = 0 y f& = 0 ⇒ Se forma una rótula plástica
(I-4.20)
En este caso las deformaciones plásticas están constituidas por una rotación plástica, θp
producto del momento flector y un alargamiento axial plástico, lp consecuencia de la carga
axial como se muestra en la figura (I-4.17).
Sin fuerza axial
dθp
Con fuerza axial
yO
dlp
dθp
Figura I-4.17. Representación de las deformaciones plásticas en una rótula sometida a flexión y carga axial
La ley de evolución de las deformaciones plásticas sigue la Ley de Normalidad que
implica que si se representan las deformaciones plásticas como un vector de componentes dθp
y dlp, el mismo es perpendicular a la superficie de fluencia en el punto correspondiente (M, N)
79
que produce la formación de la rótula plástica como se muestra en la figura I-4.18. Esta ley
puede ser demostrada de la siguiente manera. En la figura I-4.18 se puede observar que la
tangente de la curva de límite elástico es
dN
. Derivando las expresiones (I-4.15) y (I-4.16) se
dM
obtiene la pendiente de la tangente a la curva como:
dN − 1
=
dM y o
(I-4.21)
Asimismo de la figura I-4.17 se obtiene que el alargamiento plástico y la rotación plástica se
relacionan a través de la expresión:
dl = y o dθ
p
p
⇒
dl p
yo = p
dθ
(I-4.22)
Con esto queda demostrada la ortogonalidad entre la tangente del dominio elástico y el vector
de deformaciones permanentes.
La ley de normalidad se expresa como:
dθ p = dλ
∂f
∂M
(I-4.23)
dl p = dλ
donde los términos
∂f
∂N
df
df
y
indican la normalidad con respecto a la superficie de fluencia,
dM dN
es decir, están relacionados con la dirección del vector de deformaciones plásticas y dλ está
relacionado con el módulo del vector de deformaciones plásticas por lo que solo puede ser
positiva.
80
N
Ny
dlp
dθp
-My
Dominio elástico
My
M
-Ny
Figura I-4.18. Representación de la Ley de Normalidad
En consecuencia la ley de evolución de las deformaciones plásticas se plantea como:
⎧dλ = 0
⎨
⎩dλ ≠ 0
si
si
f < 0 o df < 0
f = 0 y df = 0
(I-4.24)
I.4.3. Sólidos tridimensionales elastoplásticos
Como se mencionó anteriormente en el caso de la elastoplasticidad las ecuaciones
cinemáticas y de equilibrio, descritas en la sección I-1 siguen siendo válidas. Por el contrario,
es necesario plantear una nueva la ley de comportamiento que considere la existencia de las
deformaciones plásticas.
Cuando se analizan sólidos tridimensionales elastoplásticos, se debe considerar el
estado de esfuerzos que se describió en la sección I-1.2 y que se muestra en la figura I-4.19.
Como se mencionó en esa sección, debido a que en un punto P hay un número infinito de
esfuerzos, el estado de esfuerzos está relacionado con algunos planos particulares que pasan a
81
través de él y por lo tanto la magnitud de sus componentes depende del sistema coordenado
considerado.
σ33
σ32
x3, u3
σ31
σ13
σ11
σ23
σ22
σ12 σ21
x2, u2
x1, u1
Figura I-4.19. Estado general de esfuerzos en un elemento representativo de volumen en sólido tridimensional
La ley de comportamiento en este caso está dada por la ley de estado:
{σ} = [C]{ε − ε p } o {ε − ε p } = [S]{σ}
(I-4.25)
donde [C] es la matriz de coeficientes elásticos del material y [S] = [C]-1 tal y como fueron
definidas en el capítulo I-1. {εp} agrupa las deformaciones permanentes asociadas a las
deformaciones {ε}.
Para la función de fluencia han sido propuestas diversas expresiones. A continuación
se presenta la descripción de algunas de ellas.
Modelos para metales
Criterio de Rankine
Rankine propone una función de fluencia que depende de los esfuerzos principales,
como:
82
f = max(σ I ,−σ III ) − σ y
(I-4.26)
donde σI es el esfuerzo principal máximo (mayor valor a tracción) y σII es el esfuerzo
principal mínimo (mayor valor a compresión). En la figura I-4.20 se muestra la comparación
de algunos resultados experimentales obtenidos al ensayar metales como hierro colado, acero,
cobre y aluminio, sometidos a un estado de esfuerzos biaxiales, con el criterio de fluencia de
Rankine.
Criterio deTresca
Criterio de Von Mises
Hierro fundido
Acero
Cobre
Aluminio
Criterio de Rankine
Figura I-4.20. Comparación de los Criterios de Rankine, Tresca y Von Mises con datos de algunos ensayos.
(Popov (1997))
Como se puede observar en esta figura, el criterio de Rankine es adecuado para describir el
comportamiento de materiales frágiles como el hierro fundido pero no muy acertado para otros
metales en los cuales la plasticidad es consecuencia de la existencia de esfuerzos cortantes.
Criterio de Tresca
Este criterio resulta de la observación de que en un material dúctil durante la fluencia,
aparece deslizamiento a lo largo de planos críticamente orientados. En consecuencia, el
esfuerzo cortante máximo desempeña el papel clave y se supone que la fluencia depende
únicamente del máximo esfuerzo cortante que se alcanza dentro de un elemento. De acuerdo a
83
este criterio, las deformaciones plásticas aparecen en un cierto punto cuando el máximo
esfuerzo tangente alcanza un cierto valor τy. Este criterio es también conocido como criterio
del esfuerzo cortante máximo y representa de manera adecuada el comportamiento de metales
puros como el acero, el cobre y el aluminio. El criterio de Tresca se expresa como:
f = τ max − τ y ≤ 0
(I-4.27)
donde:
τ max =
σ I − σ III
2
(I-4.28)
y
τy =
σy
2
(I-4.29)
Introduciendo (I-4.28) y (I-4.29) en (I-4.27) se obtiene:
f = σ I − σ II − σ y ≤ 0
(I-4.30)
Como se muestra en la figura I-4.20 con este criterio se puede describir de manera
adecuada el comportamiento de metales dúctiles como el acero, cobre y aluminio. La
superficie de fluencia obtenida con el criterio de Tresca para el estado de esfuerzo
tridimensional es una superficie hexagonal inscrita en un cilindro como se muestra en la figura
I-4.21.
Ley de Normalidad
Los criterios presentados anteriormente permiten determinar cuando la plasticidad está
activa o no. Sin embargo al igual que en el caso de una rótula plástica sometida a fuerza axial
y momento flector, resta por definir la manera como se producirán las deformaciones
permanentes. En el caso de la rótula plástica pudo demostrarse que las deformaciones plásticas
resultantes obedecen la Ley de Normalidad. Para medios continuos esta ley no puede
demostrarse, sin embargo numerosos modelos postulan su validez en este caso también.
84
Eje o línea
central
σ II
Círculo de Von Mises
σ II
σI
σI
σ III
Hexágono de Tresca
σ III
Vista según el eje
Figura I-4.21. Superficies de fluencia de Tresca y Von Mises para el estado de esfuerzo tridimensional.
(Popov (1997))
Aquellos modelos basados en la Ley de Normalidad son denominados modelos estándar y se
expresan como:
ε& p = λ&
∂f
∂σ
(I-4.31)
La ley de evolución para los modelos estándar es por lo tanto:
⎧⎪λ& = 0
⎨&
⎪⎩λ ≠ 0
si
si
f < 0 o f& < 0
f = 0 y f& = 0
(I-4.32)
Criterio de Von Mises o de la Energía máxima de distorsión
Como podemos observar en las figuras I-4.20 y I-4.21, la aplicación de la Ley de
Normalidad no está definida en los vértices del hexágono que se obtiene con el criterio de
Tresca. El criterio que se presenta a continuación solventa este problema representando de
igual manera el comportamiento de metales dúctiles.
85
En este enfoque se supone que la energía total de deformación se divide en dos partes:
una asociada a los cambios volumétricos del material, y otra que produce distorsiones por
corte. Adicionalmente considera que la plasticidad no produce cambios volumétricos por lo
que el criterio de fluencia se establece igualando la energía de distorsión o de deformación por
corte en el punto de fluencia en tensión simple con la energía correspondiente al esfuerzo
combinado.
Para obtener el criterio de fluencia se utiliza el principio de superposición. Se considera
que el tensor de esfuerzos correspondiente a los tres esfuerzos principales σI, σII y σIII está
compuesto de dos tensores componentes aditivos. Uno de estos tensores se denomina tensor de
esfuerzo dilatacional y el otro se denomina tensor de esfuerzo distorsional (o desviatorio). Esto
se escribe matricialmente como:
⎡σ I
⎢
⎢0
⎢
⎢⎣ 0
0
σ II
0
0 ⎤ ⎡ σ 0 0 ⎤ ⎡σ I − σ
0
0 ⎤
⎥
⎥ ⎢
⎥ ⎢
0 ⎥ = ⎢0 σ 0⎥ + ⎢ 0
0 ⎥
σ II − σ
⎥
⎥ ⎢
⎥ ⎢
0
σ III − σ ⎥⎦
σ III ⎥⎦ ⎢⎣ 0 0 σ ⎥⎦ ⎢⎣ 0
(I-4.33)
donde σ es el esfuerzo hidrostático medio que se define como
σ=
σ I + σ II + σ III
3
(I-4.34)
Esta descomposición se muestra gráficamente en la figura I-4.22. Se sabe que el último estado
de esfuerzos mostrado en esta figura, no produce cambios volumétricos sino que sólo
distorsiona o desvía al elemento de su forma cúbica inicial.
La energía total de deformación por unidad de volumen en términos de los esfuerzos
principales es:
U total =
1
ν
(σ 2I + σ 2II + σ 2III ) − (σ I σ II + σ II σ III + σ III σ I )
2E
E
(I-4.35)
86
σ II − σ
σ
σ II
σI
σ
=
σ III
σI − σ
+
σ
σ III − σ
Figura I-4.22. Descomposición de esfuerzos principales en esfuerzos dilatacionales y distorsionales
La energía de deformación por unidad de volumen debida a esfuerzos dilatacionales se obtiene
a partir de la ecuación (I-4.35) haciendo primero σ I = σ II = σ III = p y sustituyendo p por
σ = (σ I + σ II + σ III ) / 3 resultando:
U dilatación =
3(1 − 2ν) 2 1 − 2ν
p =
(σ I + σ II + σ III ) 2
2E
6E
(I-4.36)
Restando la ecuación (I-4.35) de (I-4.36) y considerando que G = E /(1 + ν) se obtiene la
energía de distorsión:
U distorsión =
1
[(σ I − σ II ) 2 + (σ II − σ III ) 2 + (σ III − σ I ) 2 ]
12G
(I-4.37)
Igualando la energía de distorsión con la energía de distorsión máxima en tensión simple
2σ y / 12G se obtiene:
(σ I − σ II ) 2 + (σ II − σ III ) 2 + (σ III − σ I ) 2 = 2σ 2y
(I-4.38)
El criterio de fluencia para una material idealmente plástico se escribe como:
f = σ eq − σ y
(I-4.39)
87
donde:
σ eq =
1
[(σ I − σ II ) 2 + (σ II − σ III ) 2 + (σ III − σ I ) 2 ] =
2
(I-4.40)
1
2
2
=
[(σ11 − σ 22 ) 2 + (σ 22 − σ 33 ) 2 + (σ 33 − σ11 ) 2 + 6(σ12
+ σ 223 + σ 31
)]
2
Para σIII = 0 la ecuación (I-4.38) corresponde a una elipse como se muestra en la figura
I-4.20. La superficie de fluencia en el estado de esfuerzos tridimensionales resulta en un
cilindro como se muestra en la figura I-4.21. Como se puede observar en esta figura no existe
problema alguno en aplicar la Ley de Normalidad para definir la manera como se producirán
las deformaciones permanentes.
Endurecimientos Cinemático e Isótropo
Hasta ahora se han presentado varios criterios que permiten definir la superficie de
cedencia inicial en la cual un material comienza a fluir. Para un material perfectamente
plástico, esta superficie permanece fija, como se observa en un ensayo de tracción simple
donde el esfuerzo se mantiene constante después de la fluencia (figura I-4.2a). Sin embargo,
para un material que presenta endurecimiento con el incremento de la deformación, la
superficie de cedencia debe cambiar cuando se le deforma continuamente más allá de la
fluencia inicial. Para representar este efecto, al igual que en el caso uniaxial, en la formulación
de la función de fluencia se considera el efecto de endurecimiento, bien sea, isótropo y/o
cinemático.
En el endurecimiento isótropo, la superficie de fluencia se expande con el esfuerzo y la
historia de deformaciones, pero mantiene la misma forma inicial. En la figura I-4.23 se
muestra la superficie de cedencia para un material que obedece el criterio de Von Mises con
endurecimiento isótropo en el espacio de esfuerzos a tracción y compresión. El
endurecimiento isótropo es el más sencillo de aplicar desde el punto de vista matemático, pero
no toma en cuenta el efecto de Baushinger. Este efecto tiende a reducir el tamaño del dominio
elástico en un lado mientras que lo incrementa en el otro. En consecuencia, la superficie de
88
fluencia cambia de forma con el progreso de fluencia. Para considerar endurecimiento isótropo
el criterio de fluencia toma la forma:
f = f y ( σ) − Γ ( R )
(I-4.41)
donde fy es una función que indica la forma del criterio del límite elástico considerado (Tresca,
Von Mises, etc.) y Γ es la función donde se introduce el endurecimiento y que relaciona la
fuerza termodinámica R con la variable plástica considerada.
σ II
σ
M
σy + R
σy
Superficie
actual
0 p’
1
p
εp
Superficie
inicial
σ III
σI
M’
Figura I-4.23. Endurecimiento isótropo. (Lemaitre y Chaboche (1985))
Para considerar el efecto Baushinger, Prager (1955) introdujo el endurecimiento
cinemático como se describió en la sección I-4.1 para el caso uniaxial. En este modelo el
rango elástico total se mantiene constante mediante la traslación de la superficie de fluencia
inicial sin deformación. El criterio de fluencia en este caso tiene la forma
f = f y (σ − X ) − k
(I-4.42)
La variable de endurecimiento X es de naturaleza tensorial e indica la posición actual de la
superficie de cedencia. En la figura I-4.24 se muestra esquemáticamente el movimiento de la
superficie de falla en el espacio de esfuerzos a tracción y compresión y el correspondiente
89
diagrama esfuerzo-deformación. El valor del límite elástico k es diferente en cada modelo.
Como se mostró anteriormente, por lo general difiere del valor σy utilizado en el caso uniaxial.
σ
σ II
k
Superficie
inicial
r
X
σ III
k
X
εp
σI
Figura I-4.24. Movimiento de la superficie de falla en el espacio de esfuerzos a tracción y compresión y el
correspondiente diagrama esfuerzo-deformación. (Lemaitre y Chaboche (1985))
Ablandamiento por deformación
Existen materiales en los cuales una vez alcanzado el esfuerzo máximo admisible, el
límite elástico comienza a disminuir debido al deterioro del material. Se supone que cuando
las deformaciones plásticas alcanzan un valor crítico comienza a producirse el ablandamiento
del material. En esta etapa se producen incrementos de las deformaciones totales y plásticas a
pesar de reducirse el esfuerzo. Este efecto puede ser modelado a partir de los mismos términos
de endurecimiento isótropo o cinemático pero considerándolos con pendiente negativa.
Modelos para rocas y suelos
Criterio de Mohr Coulomb
El criterio de Mohr establece que la falla es gobernada por la relación:
τ = f (σ)
(I-4.43)
90
donde el esfuerzo límite τ depende solo del esfuerzo normal σ en el mismo plano en cierto
punto. La envolvente de falla f(σ) es una función determinada experimentalmente. De acuerdo
al criterio de Mohr, la falla del material ocurre para todos los estados de esfuerzos en los
cuales el círculo de Mohr es tangente a la envolvente de falla. Esto implica que el esfuerzo
intermedio σII no tiene influencia en la condición de falla.
La forma más simple de la envolvente de falla de Mohr es una línea recta como la que
se muestra en la figura (I-4.25a). La ecuación de la línea recta está dada por
τ = C + σ tagφ
(I-4.44)
donde C y φ son propiedades del material; C representa la cohesión y φ representa el ángulo de
fricción interna.
(a)
τ
C
Cohesión
(b)
φ
Angulo de
fricción
σ II
(H,H,H)
σ
σI
σ III
Figura I-4.25. Criterio de Mohr-Coulomb (a) Diagrama de Mohr (b) En el espacio de esfuerzos principales.
(Halphen y Salençon (1987))
El criterio de falla asociado con la ecuación (I-4.44) es llamado criterio de Mohr-Coulomb y
se expresa como:
f = τ max − K (σ)
(I-4.45)
donde:
91
τ max =
σ I − σ III
2
(I-4.46)
y
K ( σ) =
σ I − σ III
senφ + C cos φ
2
(I-4.47)
Introduciendo (I-4.47) y (I-4.46) en (I-4.45) se obtiene:
f = σ I − σ III − (σ I + σ III )senφ − 2C cos φ
(I-4.48)
En el espacio de esfuerzos principales, el criterio de Mohr-Coulomb representa una
pirámide hexagonal irregular como la que se muestra en la figura I-4.25b. En la figura I-4.26
se muestra la sección del dominio elástico para un plano deviatórico de ecuación
σ I + σ II + σ III = 3P .
σ III
3
4sen ϕ
(P + H)
2
3 + sen ϕ
3
4senϕ
(P + H)
2
3 − senϕ
0
σI
σ II
Figura I-4.26. Criterio de falla de Mohr-Coulomb en el plano deviatórico de ecuación
σ I + σ II + σ III = 3P .(Halphen y Salençon (1987))
El criterio de Mohr-Coulomb presenta dos deficiencias. Primero, asume que el
esfuerzo principal intermedio no tiene influencia en la falla, aspecto que es contrario a la
evidencia experimental. Segundo, las meridianas y la envolvente de falla son líneas rectas en
92
el diagrama de Mohr, lo que implica que el parámetro φ no cambia con la presión de
confinamiento (presión hidrostática). Adicionalmente, como se puede observar la superficie de
falla tiene esquinas (o singularidades) que como se sabe son difíciles de manejar en los
análisis numéricos. Sin embargo, debido a su simplicidad y buena precisión, este criterio es
ampliamente usado en la actualidad para aplicaciones prácticas en suelos que presentan una
cantidad limitada de presión de confinamiento.
Criterio de Drucker-Prager
Este criterio, que es una modificación del criterio de Von Mises, es usado
frecuentemente en aplicaciones prácticas. En él se incorpora la dependencia con respecto a la
presión hidrostática. El criterio de Drucker-Prager se expresa como:
f (σ) = σ eq − K (σ)
(I-4.49)
donde σeq tiene la expresión mostrada en (I-4.40), y
K (σ) = α ( H − 3σ h )
(I-4.50)
H es la cotangente del ángulo de fricción interna, σh la presión hidrostática y α tiene la
expresión
α=
3senφ
3(3 + sen 2 φ)
(I-4.51)
La superficie de falla de Drucker-Prager en el espacio de esfuerzos principales se
muestra en la figura I-4.27. Como se puede observar en la figura, esta superficie es un cono
circular recto cuyos ejes corresponden a los ejes de esfuerzos hidrostáticos σ I = σ II = σ III . La
traza de falla en el plano deviatórico se muestra en la figura I-4.28.
93
σ III
(H,H,H)
σ II
σI
Figura I-4.27. Criterio de falla de Drucker-Prager en el espacio de esfuerzos principales.
(Halphen y Salençon (1987))
Modelos No Estándar
Como se puede observar en la figura I-4.27, la superficie de falla del modelo de
Drucker-Prager resulta matemáticamente más conveniente que la de Mohr-Coulomb cuando se
realizan análisis tridimensionales por no presentar esquinas (o singularidades). Ahora bien,
cuando se superponen las trazas deviatóricas de ambos modelos (ver figura I-4.28) se puede
observar que el criterio de Drucker-Prager, que corresponde a un círculo, sobrestima la
resistencia del material y no guarda semejanza con las observaciones experimentales. Para
solventar esta situación se utiliza un modelo llamado “no estándar” en el cual se considera el
criterio de Mohr-Coulomb para definir la ley de evolución del flujo plástico y la función de
Drucker-Prager para definir su correspondiente dirección. De este modo el modelo resulta
dε p = dλ
dF
dσ
(I-4.52)
Siendo la ley de evolución:
⎧dλ = 0
⎨
⎩dλ ≠ 0
si
si
f < 0 o df < 0
f = 0 y df = 0
(I-4.53)
94
donde F corresponde a la función de fluencia de Drucker-Prager (ecuación (I-4.49)) y f la
correspondiente al modelo de Mohr-Coulomb (ecuación (I-4.48)).
σ III
Criterio de Drucker-Prager
Criterio de Mohr-Coulomb
0
σI
σ II
Figura I-4.28. Criterios de falla de Mohr-Coulomb y Drucker-Prager en el plano deviatórico
En general los modelos en los cuales el potencial para la ley de normalidad no
corresponde a la función de fluencia de la ley de evolución son denominados “modelos no
estándar”.
95
Capítulo I-5
Teoría de pórticos planos elastoplásticos
En este capítulo se presentan las leyes de comportamiento que permiten considerar la
posibilidad de aparición de deformaciones permanentes, o sea deformaciones remanentes bajo
cargas nulas en pórticos planos. Para ello se siguió el esquema propuesto en Flórez-López
(1999).
I-5.1. Cinemática de pórticos planos
Para estudiar el movimiento de una estructura se introducen los conceptos de
desplazamiento y de deformación. Los desplazamientos permiten representar el movimiento
de la estructura desde un punto de vista matemático y las deformaciones describen el cambio
de forma que sufren sus miembros como consecuencia del movimiento experimentado. La
cinemática del pórtico se describe al deducir las relaciones que existen entre estas dos
variables.
Desplazamientos generalizados
Considérese una estructura aporticada compuesta por m miembros estructurales
conectados entre sí por n nudos como se muestra en la figura I-5.1a. Se desea estudiar el
movimiento de la estructura durante el intervalo de tiempo [0,T]. Para definir la posición de
cada uno de los nudos del pórtico se introduce un sistema de ejes coordenados X ,Y y Z, que
permanece inmóvil durante el movimiento de la estructura. La configuración del pórtico en el
instante cero, es decir, las coordenadas que definen la posición inicial de los n nudos de la
estructura, se supone conocida y se denomina “configuración inicial”. Para cualquier otro
instante, la configuración de la estructura no es en general conocida y se denomina
“configuración deformada”. Para representar entonces el movimiento de la estructura se
definen las siguientes variables:
a) Los desplazamientos generalizados del nudo “i” se agrupan en la matriz columna
{u}it = {u 1 , u 2 , u 3 } donde u1 y u2 indican respectivamente, los desplazamientos del nudo en las
96
direcciones X y Y; u3 es la rotación del nudo con respecto a su posición en la configuración
inicial como se muestra en la figura I-5.1b. El superíndice t indica la transpuesta de la matriz.
b) La matriz de desplazamientos generalizados de un elemento b entre los nudos i y j está
compuesta por los desplazamientos de ambos nudos y se agrupan en la matriz columna
{q}bt = {{u}it ,{u}tj } = {q1 , q 2 , q 3 ,L, q 6 }. Esta variable caracteriza el movimiento de la barra.
c) La matriz de desplazamientos generalizados de la estructura está compuesta por los
desplazamientos de todos los nudos de la estructura que se agrupan en la matriz columna
{U}t = {{u}1t ,{u}2t ,L{u}nt } = {U 1 , U 2 ,L , U 3n } . Esta matriz define el movimiento de toda la
estructura.
Estas tres variables son equivalentes y representan un concepto similar a tres niveles
diferentes: el nudo, el miembro y la estructura.
(a)
(b)
u3
u2
u1
Y
Z
X
Figura I-5.1. Representación de un pórtico plano y desplazamientos generalizados del nudo
Desplazamientos restringidos
Con el fin de asegurar la estabilidad de la estructura, algunos desplazamientos deben
ser restringidos. Esto significa que sus valores durante el intervalo [0,T] son conocidos e
impuestos por el analista. Los grados de libertad restringidos de la estructura se agrupan en el
conjunto Uk que será denominado conjunto de “apoyos” de la estructura. Es decir:
97
U k = U dk ( t ) para
k ∈ Nu
(I-5.1)
donde U dk ( t ) son funciones conocidas del tiempo. Uk es el k-ésimo elemento de la matriz de
desplazamientos del pórtico. En numerosos casos prácticos, las funciones U dk ( t ) son nulas.
Alternativamente, pueden definirse velocidades o aceleraciones en los apoyos. Estas
variables conocidas más las condiciones iniciales en el instante t = 0 permiten determinar la
historia de desplazamientos de los apoyos mediante su integración en el tiempo. El uso de las
aceleraciones en lugar de los desplazamientos en los apoyos es típico de los problemas de
Ingeniería Sísmica.
Deformaciones generalizadas
Esta variable permite describir el cambio de forma que experimentan los miembros
debido al desplazamiento de la estructura.
Considérese un miembro de pórtico b entre los nudos i y j. La matriz de deformaciones
generalizadas está dada por: {Φ}bt = {φ i , φ j , δ} , donde φi y φj son las rotaciones de la tangente
del miembro en los extremos i y j con respecto a la cuerda y δ representa el alargamiento
axial. Estas deformaciones se muestran en la figura I-5.2 y se miden con respecto a la
configuración inicial.
En el caso particular de un movimiento de cuerpo rígido de un miembro, la matriz de
deformaciones generalizadas es nula. Esta variable es equivalente al tensor de deformaciones
que se utiliza en la mecánica de los medios continuos. Al igual que en esta última teoría, la
medida de deformación no es única y pueden introducirse otras variables equivalentes que
representen el mismo concepto.
Ecuaciones cinemáticas
Las ecuaciones cinemáticas relacionan las deformaciones con los desplazamientos
generalizados a través de relaciones geométricas. A fin de obtener estas expresiones,
supóngase que un miembro de la estructura se somete a un incremento diferencial dq1 del
desplazamiento en dirección X del nudo i, mientras las demás componentes de la matriz de
98
desplazamientos generalizados del miembro permanecen nulos (ver figura I-5.3a). Este
desplazamiento da lugar a los siguientes incrementos en las deformaciones generalizadas:
dφ i = dq1
senα
;
L
dφ j = dq1
senα
;
L
dδ = −dq1 cos α
(I-5.2)
φj
Lo+ δ
φi
Lo
Figura I-5.2. Deformaciones generalizadas de un miembro de pórtico plano
Donde L es la longitud de la cuerda i-j y α es el ángulo de la cuerda con respecto al eje X del
sistema de referencia. De manera similar, un incremento dq2 en la dirección Y del mismo nudo
(figura I-5.3b) produce incrementos en las deformaciones generalizadas que se expresan de la
forma:
dφi = −dq 2
cos α
;
L
dφ j = −dq 2
(b)
(a)
cos α
;
L
dδ = −dq 2 senα
(c)
L
α
dq1
(I-5.3)
L
dq2
L
α
dq3
Figura I-5.3. Deformaciones generalizadas del miembro i-j producidas por incrementos diferenciales de
los desplazamientos del nudo i.
99
Por último, un incremento diferencial dq3 de la rotación del nudo i (figura I-5.3c) proporciona
los siguientes incrementos de deformaciones generalizadas:
dφ i = dq 3 ;
dφ j = 0;
dδ = 0
(I-5.4)
De igual manera se pueden obtener los incrementos de las deformaciones que se producen al
aplicar desplazamientos dq 4 , dq 5 y dq 6 en el nudo j. Al ser estas deformaciones
infinitesimales es posible aplicar el principio de superposición. Por lo tanto, en el caso general
en el que se producen simultáneamente desplazamientos en todos los grados de libertad del
miembro, se obtiene la relación:
cos α
⎡ senα
−
⎢ L
L
⎢ senα
cos α
[Bl (q)] = ⎢
−
L
⎢ L
⎢− cos α − senα
⎢⎣
{Φ& } = [B (q)]{q& }
l
senα
L
senα
0 −
L
0 cos α
1 −
cos α
L
cos α
L
senα
⎤
0⎥
⎥
1⎥
⎥
0⎥
⎥⎦
(I-5.5)
[B l (q)] es denominada “matriz de transformación local”. En general L = L(q) y α = α(q) son
funciones de los desplazamientos previos experimentados por el miembro, lo que justifica
expresar la matriz de transformación como una función de los desplazamientos. Se supone, sin
embargo, que las longitudes L(q) no son significativamente diferentes a la longitud inicial Lo.
Las deformaciones de una barra b pueden relacionarse con los desplazamientos de
todos los nudos de la estructura introduciendo una matriz de transformación global [B(q)]b de
la siguiente manera:
{Φ& } = [B(U)] {U& }⇒ [B(U)]
b
b
⎡
⎢0
⎢
= ⎢0
⎢
⎢0
⎢⎣
1
senα
cos α
−
L
L
senα
cos α
L
−
L
L
L − cos α − senα
L
L
3i - 2
3i - 1
senα
L
senα
0 L −
L
0 L cos α
cos α
L
cos α
L
senα
3i L
3j - 1
1 L −
3j - 2
⎤
0 L⎥
⎥
1 L⎥
⎥
0 L⎥
⎥⎦
3j L
(I-5.6)
100
Puede observarse que la matriz de transformación global se obtiene introduciendo columnas
adicionales en la matriz de transformación local del elemento. Estas columnas adicionales solo
contienen ceros y se incluyen en los lugares que no corresponden a los grados de libertad del
elemento. Es decir, las únicas columnas de la matriz de transformación no nulas son las
columnas 3i-2, 3i-1, 3i, 3j-2, 3j-1 y 3j.
Cuando el miembro experimenta una transformación desde la configuración inicial
hasta una configuración final, pasa por un número infinito de configuraciones intermedias. Las
ecuaciones cinemáticas se obtienen mediante la integración desde la configuración inicial
hasta la configuración final de la siguiente manera:
{Φ}b = ∫ [B( U)]b {U& }dt
t
(I-5.7)
o
Si se acepta la hipótesis de “pequeños desplazamientos”, que consiste en admitir que
las modificaciones de la matriz de transformación del elemento durante su movimiento son
despreciables, la matriz de transformación permanecerá constante, esto es:
[B( U)] ≅ [B o ]
(I-5.8)
Donde [B o ] es la matriz de transformación en la configuración inicial. En este caso la
integración de la ecuación cinemática resulta en:
{Φ} = [B ol ]{q}
o
{Φ}b = [B o ] b {U}
(I-5.9)
I-5.2. Dinámica de pórticos planos
En esta sección se estudia la caracterización de las fuerzas externas y de las variables
que definen la manera como éstas se reparten entre los diferentes elementos constitutivos de la
estructura. Para ello se introducen los conceptos de esfuerzos generalizados y fuerzas de
inercia. La dinámica de la estructura se define por completo al establecer las relaciones entre
101
las fuerzas externas, los esfuerzos generalizados y las fuerzas de inercia. Estas relaciones son
obtenidas a través del principio de las potencias virtuales.
Esfuerzos generalizados
De acuerdo a la selección realizada para la representación de las deformaciones, los
esfuerzos generalizados se agrupan en la matriz {M}t = {m i , m j , n} . Como se puede observar
en la figura I-5.4, mi y mj representan los momentos flectores en los extremos del elemento y n
representa la carga axial.
mi
n
mj
Figura I-5.4. Esfuerzos generalizados en un miembro de pórtico plano
Fuerzas externas sobre los nudos
Las fuerzas externas que actúan en un pórtico plano se agrupan en la matriz
{P}t = {P1 , P2 , P3 ,LL P3n −2 , P3n −1 , P3n } . Los términos P1, P4,…P3n-2 representan las fuerzas en
dirección del eje X aplicadas en los nudos 1,2,…,n respectivamente. Los términos P2,
P5,…P3n-1 representan las fuerzas en dirección del eje Y aplicadas en los nudos 1,2,…,n
respectivamente, mientras que P3, P6,…P3n representan los momentos que actúan en los
mismos nudos.
Las fuerzas externas que corresponden al conjunto Nu de grados de libertad
restringidos de la estructura son llamadas “reacciones” de los apoyos. Estas reacciones son a
priori desconocidas y forman parte de las incógnitas del problema. Todos los grados de
libertad que no se incluyen en Nu se agrupan en el conjunto Np llamado conjunto de nudos no
restringidos. Las fuerzas externas que corresponden a los grados de libertad contenidos en Np
son datos impuestos por el analista, esto es:
Pl = Pld ( t )
(I-5.10)
102
donde Pld ( t ) son funciones del tiempo conocidas durante el intervalo en el que se desea
calcular la estructura y Pl es el l-ésimo elemento de la matriz de fuerzas externas.
Fuerzas de inercia
Las fuerzas de inercia de un miembro de pórtico plano se representan por medio de la
matriz {I l }bt = {I1 , I 2 ,…, I 6 } , donde
{I l }bt = {[masa l ] b {&q&}}t
(I-5.11)
[masal]b corresponde a la matriz de masas del miembro b referida a los desplazamientos del
⎧ d 2q ⎫
elemento y {&q&} = ⎨ 2 ⎬ es la matriz de aceleraciones generalizadas del mismo. En este
⎩ dt ⎭
trabajo se consideró la matriz de masas consistente que en el caso de miembros rectos de
sección constante tiene la forma:
⎡140c 2 + 156s 2
⎤
⎢
⎥
simétrica
⎢
⎥
− 16cs
156c 2 + 140s 2
⎢
⎥
2
⎢
⎥
− 22cL o
22sL o
4L o
m ⎢
⎥
[masa l ] =
2
2
⎥
420 ⎢ 70c 2 + 54s 2
16cs
13sL o 140c + 156s
⎢
⎥
2
2
2
2
⎢
⎥
− 16cs
16cs
54c + 70s − 13cL o
156c + 140s
⎢
⎥
⎢ − 13sL
2
2 ⎥
− 3L o
− 22sL o
13cL o
22cL o
4L o ⎦
o
⎣
(I-5.12)
Donde m es la masa total del miembro, c = cos α, s = sen α y Lo es la longitud inicial del
miembro.
Alternativamente, puede usarse la matriz de fuerzas de inercia {I g }b y de masa
[masa g ]b de la barra b referida a los desplazamientos del pórtico. En este caso, las fuerzas de
inercia son {I g }bt = {I1 , I 2 ,…, I 3n } y están dadas por:
103
&& }}t
{I g }bt = {[masa g ]b {U
(I-5.13)
&& } es la matriz de aceleraciones del pórtico plano. La matriz de masas del miembro
donde {U
referida a los desplazamientos de la estructura se construye añadiendo filas y columnas que
solo contienen ceros en los lugares que no corresponden a los grados de libertad del elemento
en la matriz de masas (I-5.12).
La matriz {I} de las fuerzas de inercia del pórtico plano se construye sumando las
fuerzas de inercia de todos los miembros:
m
m
b =1
b =1
&& } = [masa ]{U
&& }
{I} = ∑{I g }b = ∑ [masa g ]b {U
(I5.14)
m
donde [masa ] = ∑ [masa g ]b es denominada matriz de masas del pórtico. Puede constatarse
b =1
que en el caso general la matriz de masas depende de los desplazamientos del pórtico, es decir
[masa]=[masa(U)]. En el caso particular de pequeños desplazamientos, la matriz de masas se
calcula en la configuración inicial y permanece constante durante el movimiento de la
estructura.
Ecuación de equilibrio dinámico
La ecuación de equilibrio para pórticos planos puede ser obtenida a través del principio
de las potencias virtuales. Considérese un pórtico como el mostrado en la figura I-5.1,
constituido por m miembros y n nudos. Si el pórtico es sometido a desplazamientos virtuales
{U*}, el principio de las potencias virtuales se expresa como:
Pi* + Pa* =P *e
∀{U * }
(I-5.15)
donde Pi* se denomina potencia de deformación (o potencia interna), Pa* es la potencia de las
fuerzas de inercia y Pe* representa la potencia de las fuerzas externas nodales. Cuando la
ecuación (I-5.15) se verifica, se dice que la estructura está en equilibrio dinámico.
104
La potencia interna se define en términos generales como el producto de los esfuerzos
generalizados por la tasa de variación de las deformaciones virtuales de la estructura, por ello
m
m
b =1
b =1
& * }t [B] t {M}
& * }t {M} = {U
Pi* = ∑{Φ
∑ b b
b
b
(I-5.16)
& * } representan los vectores de la tasa de deformaciones y de
& * } y {U
donde {Φ
b
desplazamientos virtuales.
La potencia de las fuerzas de inercia se obtiene a partir de la matriz de masas del
elemento como:
m
& * }t {I} = {U
& * }t ∑ [masa g ] b {U
&& }
Pa* = {U
(I-5.17)
b =1
Finalmente la potencia de las fuerzas nodales externas se obtiene como:
P e* = { U& * } t { P }
(I-5.18)
donde {P} es el vector de fuerzas nodales. La aplicación del principio de las potencias
virtuales para una estructura aporticada resulta:
m
m
b =1
b =1
& * }t ∑ [B] bt {M}b + {U
& * }t ∑ [masa g ] b {U
&& } ={U
& * }t {P}
{U
& * }t
∀ {U
(I-5.19)
Considerando que la ecuación anterior debe ser válida para cualquier tasa de desplazamientos
virtuales, se obtiene la ecuación de equilibrio:
m
m
b =1
b =1
∑ [B]bt {M}b + ∑ [masa g ]b {U&& } ={P}
(I-5.20)
105
I-5.3. Leyes de Comportamiento de pórticos elásticos planos
Las leyes de comportamiento relacionan los esfuerzos con las deformaciones
generalizadas. A través de esta ecuación se caracteriza el material del pórtico, así que para dos
pórticos de similar geometría pero de diferente material (acero y concreto armado, por
ejemplo), las ecuaciones de compatibilidad o ecuaciones cinemáticas y las de equilibrio son
absolutamente idénticas y sólo las leyes de comportamiento se diferencian en ambos casos.
En el caso de pórticos elásticos la ley de comportamiento es
{Φ} = [Fo ]{M} o {M} = [K ]{Φ}
(I-5.21)
donde [Fo] es la matriz de flexibilidad elástica convencional del miembro tal como puede ser
encontrada en los textos de análisis estructural y tiene la forma:
⎡ L
⎢ 3EI
⎢
L
[Fo ] = ⎢−
⎢ 6EI
⎢
⎢ 0
⎣
L
6EI
L
3EI
−
0
⎤
0 ⎥
⎥
0 ⎥
⎥
L ⎥
⎥
AE ⎦
(I-5.22)
L es la longitud del elemento, E es el módulo de Young correspondiente al material del
elemento, A el área de la sección transversal, I el momento de inercia de la sección. [K] es
llamada matriz de rigidez del miembro que es la inversa de la matriz de flexibilidad elástica.
I-5.4. Leyes de Comportamiento de pórticos elastoplásticos planos
De igual manera que en el caso uniaxial y en sólidos tridimensionales, la ley de
comportamiento de un miembro de pórtico elastoplástico, donde se considera la aparición de
deformaciones permanentes, relaciona los esfuerzos generalizados {M} con la historia de
deformaciones generalizadas {Φ}. Para su obtención se adopta la hipótesis de “plasticidad
106
concentrada”. Esta hipótesis consiste en suponer que un miembro de pórtico está constituido
por una viga-columna elástica entre dos rótulas en los extremos donde se suponen
concentrados los efectos inelásticos como se muestra en la figura I-5.5.
Rótulas inelásticas
Viga-columna elástica
Figura I-5.5. Modelo de plasticidad concentrada de un miembro de pórtico plano
Con la finalidad de describir el comportamiento inelástico del miembro, y por lo tanto
considerar la posibilidad de aparición de deformaciones permanentes, se introduce como
variable interna la matriz de deformaciones plásticas generalizadas {Φ p } = {φ ip , φ pj ,0} que
contiene las rotaciones pláticas de las rótulas i y j, respectivamente, ambas medidas con
respecto a la cuerda deformada.
Las deformaciones generalizadas totales del miembro {Φ} pueden descomponerse en
deformaciones de la viga-columna elástica {Φvc} y deformaciones de las rótulas plásticas
{Φ p } :
{Φ} = {Φ vc } + {Φ p }
(I-5.23)
Las deformaciones de la viga-columna se relacionan con los esfuerzos generalizados mediante
las leyes de comportamiento descritas en la sección anterior puesto que su comportamiento es
elástico por definición. Sustituyendo la ecuación (I-5.23) en (I-5.21) se obtiene la ley de
estado de un miembro elastoplástico:
{Φ − Φ p } = [Fo ]{M} o {M} = [K ]{Φ − Φ p }
(I-5.24)
donde [Fo] es la matriz de flexibilidad de la viga columna elástica y [K] la matriz de rigidez
del miembro tal y como fueron definidas en la sección anterior.
107
Las leyes de evolución de las deformaciones plásticas generalizadas se obtienen
mediante dos funciones de fluencia, una para cada rótula plástica, como las descritas en el
capítulo anterior. Si por ejemplo, se consideran rótulas plásticas perfectas, se tiene:
f i (m i ) = m i − m y
f j (m j ) = m j − m y
(I-5.25)
Donde fi es la función de fluencia de la rótula i y fj la de la rótula j. Las leyes de evolución de
las deformaciones plásticas generalizadas del miembro son ahora:
Para la rótula i:
Para la rótula j:
⎧⎪φ& ip = 0 si f i < 0 o f&i < 0
⎨& p
⎪⎩φ i < 0 si f i = 0 y f&i = 0
⎧⎪φ& pj = 0 si f j < 0 o f& j < 0
⎨& p
⎪⎩φ j < 0 si f j = 0 y f& j = 0
(I-5.26)
Con el fin de poder representar el efecto Baushinger, a las expresiones (I-5.25) se les
incorpora un término de endurecimiento cinemático lineal (X) como se describió en la sección
I-4.1. Adicionalmente para considerar el aumento del tamaño del dominio elástico se introduce
un término de endurecimiento isótropo lineal R que se considera dependiente de la máxima
rotación plástica p. Estos términos tienen la forma:
X = αcφ p ;
R = βcp
(I-5.27)
donde c es una constante del material que depende de las propiedades de la sección
transversal, del signo de los momentos y de la carga axial y p es la rotación plástica máxima
en valor absoluto. En consecuencia las funciones de fluencia para las rótulas con
endurecimientos cinemático e isótropo tienen la forma:
f i (m i , φ ip ) = m i − α i c i φ ip − (m y + β i c i p i ); f j (m j , φ pj ) = m j − α j c j φ pj − (m y + β j c j p j )
(I-5.28)
108
α y β son siempre valores positivos en el intervalo comprendido entre cero y uno y se
relacionan mediante la siguiente expresión: α + β = 1. Dichos términos pueden ser
interpretados como el porcentaje de contribución de los endurecimientos cinemático e isótropo
al endurecimiento global.
La ley de estado (I-5.24) y las leyes de evolución (I-5.26 – I-5.28) constituyen la ley de
comportamiento generalizada del modelo elastoplástico con endurecimientos cinemático e
isótropo lineal, por lo que con las ecuaciones cinemáticas (I-5.6) y de equilibrio (I-5.20)
definen completamente el comportamiento de la estructura.
Puede constatarse la similitud entre la ley de comportamiento de un miembro de
pórtico plano y el modelo elastoplástico perfecto en el caso uniaxial descrito en la sección I4.1.
109
Capítulo I-6
Teoría del daño continuo y concentrado
En capítulos anteriores se consideraron dos comportamientos posibles para el material:
el elástico y el elastoplástico. El primer modelo no establece límites a los esfuerzos admisibles
en la estructura. El segundo admite que la rigidez del material es constante y no varía durante
la vida útil. Es evidente que estas hipótesis no son aceptables en numerosos casos prácticos.
La aplicación de solicitaciones, repetidas o no, produce una degradación progresiva de las
propiedades mecánicas de la estructura y del material que trae como consecuencia una pérdida
gradual de su resistencia. El objetivo de este capítulo es presentar algunos conceptos
fundamentales que conjuntamente con los mostrados en el capítulo I-2 permiten describir este
proceso.
En la mecánica de la fractura frágil se supone que el material es elástico pero se admite
la existencia de fisuras macroscópicas que pueden propagarse. Con la propagación de una
fisura, se genera una zona de alta densidad de microdefectos y/o deformaciones plásticas,
como se muestra en la figura I-6.1. Sin embargo, se supone que el comportamiento del
material puede ser descrito empleando leyes de comportamiento elásticas. Por lo tanto para
que los conceptos introducidos en el capítulo I-2 sean válidos, es necesario que la zona de
microagrietamiento sea muy pequeña con respecto al tamaño de la estructura. Si la zona
inelástica es pequeña, aunque no despreciable, las nociones de mecánica de la fractura frágil
siguen siendo aplicables con una pequeña modificación. Esta consiste esencialmente en
sustituir la longitud real de la fisura “a” por una longitud ficticia equivalente a* mayor que la
real. Este procedimiento es conocido como “corrección de Irwin” o de “Dugdale” en honor a
sus proponentes. Si por el contrario, la zona de microdefectos es significativamente grande
(ver figura I-6.1c), la mecánica de la fractura frágil deja de ser válida y se hace necesario
modelar de manera diferente el comportamiento del material durante la creación de la zona
microagrietada. Este es el objetivo de la teoría del daño continuo que se presenta en este
capítulo.
110
Zona plástica
o
microagrietada
(a) Mecánica de la fractura
frágil
(b) Mecánica de la fractura
frágil corregida
Zona plástica
o
microagrietada
(c) Teoría del daño
continuo
Figura I-6.1. Validez de la mecánica de la fractura frágil (Flórez-López (1999))
I-6.1. Definición de la variable de daño continuo y esfuerzo equivalente
Con el fin de caracterizar la densidad de microdefectos en el material, se introducirá
una nueva variable interna, denominada daño, que se define de la siguiente manera: Sea A el
área de la cara de un elemento de volumen representativo del material, orientada según la
r
normal n . Sea Ad el área de microdefectos en la misma cara (véase figura I-6.2). El daño de
esa cara ωn en el elemento representativo de volumen se define como:
ωn =
Ad
A
(I-6.1)
Puede constatarse que ωn puede tomar valores en el intervalo [0,1]. El valor de cero
r
corresponde a un elemento de volumen que no tiene microdefectos según la normal n . El
valor de uno representa un elemento de volumen partido en dos pedazos según el plano de
r
r
normal n . En términos generales, el campo ω n ( x ) representa la densidad relativa de
r
microdefectos en planos perpendiculares al vector normal n .
111
Ad= área de microdefectos
A = área total
Figura I-6.2. Daño en un medio continuo.
La hipótesis de daño isótropo simplifica considerablemente la teoría del daño continuo.
r
Esta consiste en suponer que el daño es aproximadamente constante en todas las direcciones n
posibles. Esto es:
ωn ≅ ω
r
∀n
(I-6.2)
El daño en un elemento de volumen representativo del material puede entonces ser
representado mediante la variable escalar ω. De esta manera, se tiene que las zonas
deterioradas mostradas en la figura I-6.1 pueden ser caracterizadas como el conjunto de puntos
en donde la variable de daño continuo es diferente de cero. Ello sugiere un enfoque alternativo
al problema de propagación de fisuras. Una fisura podría definirse como el conjunto de puntos
en los cuales el daño toma el valor de uno. De esta manera no sería necesario emplear
conceptos de la mecánica de la fractura al nivel macroscópico para predecir la propagación de
la fisura. También pueden seguir usándose estos conceptos y hacer uso de la teoría del daño
continuo únicamente para modelar el comportamiento del material en la zona microagrietada,
o para predecir la iniciación de fisuras en partes de la estructura donde estas no existen
previamente.
Si se tiene una barra microagrietada tal y como se muestra en la figura I-6.3, el
esfuerzo de Cauchy en la barra es igual a la relación entre la fuerza aplicada y el área
112
resistente: σ = P / A . El esfuerzo efectivo se define como la fuerza aplicada y el área resistente
efectiva: σ = P /( A − A d ) . Una expresión que relaciona el esfuerzo efectivo con el esfuerzo de
Cauchy y la variable de daño puede ser obtenida tomando en cuenta la definición de esta
última (ecuación I-6.1):
σ=
σ
1− ω
(I-6.3)
P
Figura I-6.3. Esfuerzo efectivo
I-6.2. Hipótesis de equivalencia en deformación y leyes de comportamiento
La hipótesis de equivalencia en deformaciones establece que el comportamiento de un
material dañado puede ser descrito mediante las mismas ecuaciones que corresponden al
material intacto, si se sustituye el esfuerzo de Cauchy por el esfuerzo efectivo. Así, la ley de
estado de un material elastoplástico dañado puede ser obtenida a partir de la expresión (I-4.1)
como:
σ = E (ε − ε p )
(I-6.4)
Sustituyendo la ecuación (I-6.3) en esta ecuación se obtiene
σ = (1 − ω)E(ε − ε p )
(I-6.5)
113
La función de fluencia de un material dañado también puede obtenerse siguiendo el
mismo procedimiento. Por ejemplo si se considera un material que inicialmente es
perfectamente plástico, se tiene:
f (σ, ω) = σ − σ y =
σ
− σy ≤ 0
1− ω
(I-6.6)
La función de fluencia del modelo con endurecimiento cinemático lineal se deriva de manera
similar.
La ley de evolución de las deformaciones plásticas permanece inalterada con respecto
a la propuesta en el capítulo I-4, ya que en ella el esfuerzo solo interviene a través de la
función de fluencia:
⎧⎪ε& p = 0 si f (σ, ω) < 0 o f& (σ, ω) < 0
⎨
⎪⎩ε& p ≠ 0 si f (σ, ω) = 0 y f& (σ, ω) = 0
(I-6.7)
Al introducir el daño como una nueva variable interna es necesaria la consideración de
una ley de evolución que permita su determinación. Esta ecuación adicional define por
completo la ley de comportamiento uniaxial de un material dañado. La ley de evolución del
daño en un material frágil, como el concreto o la roca, puede ser obtenida a partir el criterio de
Griffith, propuesto en el capítulo I-2, el cual también puede ser aplicado al caso de las
microfisuras caracterizadas por la variable de daño continuo. La densidad de la energía de
deformación w puede ser obtenida a partir de la ley de estado (I-6.5) como:
1
1
w (ε, ω) = σε = (1 − ω)Eε 2
2
2
(I-6.8)
La tasa de disipación de energía en un elemento de volumen puede definirse entonces
como:
G=−
∂w 1 2
= Eε
∂ω 2
(I-6.9)
114
Esta expresión se obtiene por analogía con (I-2.4a) considerando que ω es una variable que
considera la relación entre el área microfisurada y el área intacta. El criterio de Griffith a nivel
del elemento de volumen se expresa como:
⎧⎪ω
& =0
⎨
& ≠0
⎪⎩ω
si
si
& < R&
G < R (ω) o G
& = R&
G = R (ω) y G
(I-6.10)
Donde R es la resistencia al agrietamiento del material. Esta ley de evolución indica que no
habrá evolución del daño si la tasa de disipación de energía G es inferior a la resistencia al
& < R& . Por el
agrietamiento R, o si se está iniciando una descarga elástica caracterizada por G
contrario, habrá crecimiento de las microfisuras si la tasa de disipación de energía es igual a la
resistencia al agrietamiento y no se está iniciando una descarga elástica. Se admite que G > R
es imposible.
La función de resistencia al agrietamiento del material se obtiene a partir del
comportamiento observado del mismo. Por ejemplo, el comportamiento del concreto en
compresión se representa con frecuencia utilizando una envolvente parabólica de segundo
grado como la mostrada en la figura I-6.4. En este modelo la función R se define como: R =
aω2.
−σ
−ε
Figura I-6.4. Envolvente parabólica en un modelo de daño frágil
I-6.3. Teoría del daño concentrado
La teoría de daño concentrado ha sido desarrollada en la Universidad de Los Andes
desde principio de los años 90 (Cipollina et al. (1995), Flórez-López (1998), Perdomo et al.
115
(1999)). Esta teoría combina el concepto de rótula plástica introducido en el capítulo I-4, con
los métodos de la teoría del daño continuo y de la mecánica de la fractura para el análisis de
estructuras aporticadas de concreto armado y acero estructural. En este trabajo solo se
consideran las primeras.
Daño en una rótula plástica
Considérese un miembro de pórtico plano como el descrito en la sección I-5.4 del capítulo I-5.
Se postula ahora la existencia de un conjunto de variables de daño {D}t = {d i , d j , d a } , donde di
y dj son una medida de la densidad del agrietamiento por flexión en las rótulas i y j
respectivamente, como se muestra en la figura I-6.5 y da corresponde al daño debido a las
fuerzas axiales. Estos parámetros pueden tomar valores entre cero y uno al igual que la
variable de daño de los medios continuos pero está relacionada con grietas macroscópicas en
el material.
i
j
0 ≤ d i+ ≤ 1
0 ≤ d +j ≤ 1
Figura I-6.5. Representación del estado de daño por flexión en un miembro de concreto armado mediante
variables internas
Las deformaciones generalizadas totales del miembro pueden ahora descomponerse en
tres partes: las deformaciones de la viga-columna elástica, las deformaciones plásticas y un
término adicional debido al daño en el elemento:
{Φ} = {Φ vc } + {Φ p } + {Φ d } = [Fo ] {M} + {Φ p } + {Φ d }
(I-6.11)
Como puede observarse, cuando no hay agrietamiento en el miembro, el término adicional es
nulo y se obtiene la teoría de pórticos plásticos del capítulo I-5. En la siguiente sección se
116
obtendrá una expresión general para las rotaciones {Φ d } en función de la variable de daño en
las rótulas plásticas.
Matriz de flexibilidad en un miembro elastoplástico con daño
Considérese un miembro de pórtico plano sometido exclusivamente a fuerzas axiales.
La teoría del daño continuo permite determinar la relación entre la fuerza axial y el
alargamiento del miembro. A partir de la ley de estado (I-5.24) para este caso particular, se
obtiene:
δ − δp =
F33o
n
1− ω
F33o =
L
AE
(I-6.12)
donde ω es la variable de daño continuo, δ es el alargamiento de la cuerda, δp corresponde al
alargamiento plástico de la misma, n es la fuerza axial, F33o es el elemento de la tercera fila y
tercera columna de la matriz de flexibilidad elástica del miembro (ecuación I-5.22), L es la
longitud de la cuerda, A es el área de la sección transversal del miembro y E el módulo de
Young.
Por otra parte, si se emplea el modelo de elasticidad concentrada mostrado en la figura
(I-5.5) y definido por la expresión (I-6.11), la relación entre la fuerza axial y el alargamiento
de la cuerda es:
δ = δ vc + δ p + δ d = F33o n + δ p + δ d
(I-6.13)
Donde δ vc corresponde al alargamiento de la viga-columna elástica y δ d es el alargamiento
adicional debido al daño el cual se supone concentrado en las rótulas al igual que el
alargamiento plástico δ p .
Comparando las ecuaciones (I-6.12) con (I-6.13) es posible obtener una definición del
término adicional δ d :
117
δd =
ωF33o
n
1− ω
(I-6.14)
Empleando la expresión anterior se obtiene un modelo de inelasticidad concentrada
que es equivalente a la teoría del daño continuo en el caso particular considerado. Puede
observarse que cuando el daño es igual a cero, no hay deformaciones adicionales. En el otro
caso extremo, cuando el daño es igual a 1, se tiene una rótula con flexibilidad infinita (o
rigidez nula). En otras palabras, rótula y viga-columna elástica pueden suponerse
desconectadas y el conjunto no tiene capacidad alguna para transmitir fuerzas axiales.
En el caso general cuando los efectos de flexión y carga axial están presentes
simultáneamente, el problema es demasiado complejo como para obtener resultados analíticos
similares. Por lo tanto se postula que las deformaciones generalizadas debidas al daño se
expresan de la siguiente manera:
{Φ d } = [C(D)]{M}; donde
⎡ d i F11o
⎢
⎢1 − d i
⎢
[C(D)] = ⎢ 0
⎢
⎢
⎢ 0
⎣
0
d j F22o
1− d j
0
⎤
0 ⎥
⎥
⎥
0 ⎥
⎥
d a F33o ⎥
1 − d a ⎥⎦
(I-6.15)
Puede constatarse que para el caso particular de un miembro sometido únicamente a
solicitaciones axiales, la expresión (I-6.15) coincide con la (I-6.14) haciendo da = ω. En el
caso general, la variable de daño continuo no corresponde a ninguno de los parámetros de
daño de las rótulas. Los ceros fuera de la diagonal de la matriz [C(D)] implican que se está
suponiendo que el momento sobre alguna de las rótulas sólo induce rotaciones adicionales por
daño en esa misma rótula.
Sustituyendo la ecuación (I-6.15) en (I-6.11) se obtiene la ley de estado de un miembro
elastoplástico dañado:
{Φ − Φ p } = [F(D)]{M} o {M} = [K (D)]{Φ − Φ p }
(I-6.16)
118
donde [F(D)] = [C(D)] + [Fo] es la matriz de flexibilidad del miembro dañado y [K(D)] =
[F(D)]-1 su matriz de rigidez. [C(D)] puede ser considerada como la flexibilidad adicional
debida al agrietamiento del miembro.
Función de fluencia de las rótulas plásticas con daño
Un concepto equivalente al de esfuerzo efectivo descrito en la sección I-6.1 puede ser
introducido en el análisis de rótulas plásticas con daño. Se trata del momento efectivo sobre
las rótulas que se definen, por analogía con la expresión (I-6.3), de la siguiente manera:
mi =
mi
;
1− di
mj =
mj
1− d j
(I-6.17)
Si se suponen despreciables todos los efectos inelásticos axiales: alargamientos
permanentes y daño axial, las funciones de fluencia para las rótulas plásticas con daño se
obtienen a partir de la expresión (I-5.28) correspondiente a funciones de fluencia con
endurecimientos cinemático e isótopo lineal como:
f i (m i , φ ip , d i ) =
mj
mi
− α i c i φip − (m y + β i c i p i ); f j (m j , φ pj , d j ) =
− α jc jφ pj − (m y + β jc j p j )
1− di
1− d j
(I-6.18)
donde c y my son coeficientes que dependen de las propiedades del material del miembro, de
su geometría y de la fuerza axial. La determinación de estos coeficientes se detallará más
adelante. Como se explicó en el capítulo I-5, α y β son parámetros a los cuales el analista
asigna valores entre cero y uno para considerar el porcentaje de contribución de los términos
de endurecimientos cinemático e isótropo al endurecimiento global. Se recomienda que en
estructuras de concreto armado se adopten valores de α entre 0.80 y 0.95. p es la rotación
plástica máxima en valor absoluto. Los términos m, d y φp representan el momento, el daño y
la rotación plástica en la rótula correspondiente. Las leyes de evolución de las rotaciones
plásticas se expresan de igual manera que en el capítulo I-5 como:
119
Para la rótula i:
Para la rótula j:
⎧⎪φ& p = 0 si f i < 0 o f&i < 0
i
⎨& p
⎪⎩φ i < 0 si f i = 0 y f&i = 0
⎧⎪φ& pj = 0 si f j < 0 o f& j < 0
⎨& p
⎪⎩φ j < 0 si f j = 0 y f& j = 0
(I-6.19)
Leyes de evolución del daño de las rótulas plásticas
Considérese un miembro de pórtico plano como el mostrado en la figura I-5.1. La
energía de deformación complementaria del miembro dañado se obtiene a partir de la ley de
estado (I-6.16) como:
1
1
W * = {M}t {Φ − Φ p } = {M}t ([Fo ] + [C(D)]){M}
2
2
(I-6.20)
Si se supone que el daño asociado a las fuerzas axiales es despreciable ( d a ≅ 0 ). La tasa de
energía de disipación de una rótula plástica se define entonces como:
o
⎫
⎧ ∂W * ⎫ ⎧ m i2 F 11
⎪
2
⎪
⎪
G
⎫
⎧⎪ i ⎪ ⎪ ∂d ⎪ ⎪ 2(1 − d ) ⎪⎪
i
{G} = ⎨ ⎬ = ⎨ i* ⎬ = ⎨
2 o
⎬
m
F
∂
W
j 22 ⎪
⎪⎩G j ⎪⎭ ⎪
⎪ ⎪
⎪⎩ ∂d j ⎪⎭ ⎪⎩ 2(1 − d j ) 2 ⎪⎭
(I-6.21)
donde Gi y Gj representan las tasas de disipación de energía en las rótulas i y j
respectivamente. Las leyes de evolución del daño para las rótulas se escriben como:
Para la rótula i:
⎧d& i = 0 si G i < R i
⎪
⎨
⎪⎩d& i ≠ 0 si G i = R i
Para la rótula j:
& < R&
o G
i
i
& = R&
y G
i
i
⎧d& j = 0 si G j < R j
⎪
⎨
⎪⎩d& j ≠ 0 si G j = R j
& < R&
o G
j
j
& = R&
y G
j
j
(I-6.22)
donde d& representa el incremento del daño y R la función de resistencia al agrietamiento.
120
Función de resistencia al agrietamiento
En la mecánica de la fractura frágil y en la teoría del daño continuo se admite que la
resistencia al agrietamiento es una función que depende del incremento de la longitud de la
fisura, en el primer caso, o de la variable de daño continuo, en el segundo. Estas funciones se
obtienen a partir de observaciones experimentales del comportamiento del material.
A continuación se presenta el método utilizado para la determinación de la función de
resistencia al agrietamiento en un miembro de concreto armado (Cipollina et al. (1995)).
Considérese la probeta mostrada en la figura I-6.6b que representa una junta viga-columna de
un pórtico plano. La probeta está simplemente apoyada y sometida a una fuerza en el tope de
la columna. La fuerza se controla en desplazamientos y la solicitación sigue la serie de cargas
y descargas mostrada en la figura I-6.6d. En la figura I-6.6c se muestra el modelo de
plasticidad concentrada del ensayo.
(a)
2P
(b)
L
L
(d)
(c)
t
t
P=0
P=0
P=0
tiempo
Figura I-6.6. Junta viga-columna para la identificación de la resistencia al agrietamiento
Como puede observarse se está suponiendo un comportamiento simétrico de la
estructura, lo que permite el análisis de uno de sus elementos solamente. Esta hipótesis se
ajusta razonablemente a lo observado en el laboratorio hasta que se alcanza el máximo de la
curva fuerza contra desplazamiento mostrada en la figura I-6.7. A partir de ese momento se
observa una localización del daño y de la plasticidad en una sola de las rótulas y la estructura
presenta un comportamiento no simétrico.
121
100
01 2
90
3
4
5
6
7
8
80
Fuerza (KN)
70
60
50
40
30
20
10
0
0
10
20
30
40
50
60
70
80
Desplazamientos (mm)
Figura I-6.7. Curva fuerza contra desplazamiento del ensayo de la probeta para la identificación de la
resistencia al agrietamiento
Las condiciones de contorno del espécimen de la figura I-6.6 son:
m i = 0; d i = 0; φ ip = 0; m j = PL; d j = d; φ j =
tp
t
; φ pj =
L
L
(I-6.23)
Donde P es la reacción en el apoyo, t es la flecha en el centro y tp es la flecha permanente, es
decir, la flecha remanente bajo carga nula.
Introduciendo las condiciones de borde en la ley de estado (I-6.16) se obtiene una
expresión que relaciona la fuerza y la flecha:
P = Z(d)( t − t p )
donde
Z(d) = (1 − d) Z o ;
Zo =
3EI
L3
(I-6.24)
Z se interpreta como la pendiente durante la descarga elástica en el gráfico reacción contra
flecha. La constante Zo corresponde a la pendiente elástica inicial que debería existir antes de
producirse el agrietamiento del concreto. El daño en la rótula puede medirse de la siguiente
manera:
d = 1−
Z
Z0
(I-6.25)
122
Los valores de Z pueden medirse directamente de la gráfica de la figura I-6.7. Con los valores
de daño y del momento al inicio de la descarga es posible calcular la correspondiente tasa de
disipación de energía con la expresión (I-6.21). Si construye un gráfico tasa de disipación de
energía contra daño como el mostrado en la figura I-6.8, se propone la siguiente expresión
para la función de resistencia al agrietamiento en la rótula plástica:
R i = G cr + q i
ln(1 − d i )
1− di
(I-6.26)
donde Gcr y qi son parámetros que dependen de las propiedades del material del miembro, de
su geometría y de la fuerza axial. La determinación de estos coeficientes se explicará en la
siguiente sub-sección.
0,7
0,6
Daño
0,5
0,4
Modelo
0,3
Ensayo
0,2
0,1
0
0
500
1000
1500
2000
Tasa de disipación de energía (KN-mm)
2500
Figura I-6.8. Curva daño contra tasa de disipación de energía
Influencia de la carga axial
Los coeficientes my, c, Gcr y q para las rótulas i y j pueden ser calculados mediante la
resolución de un sistema de ecuaciones no lineales. Considérese una carga monotónica en un
miembro de concreto reforzado. Cuando el momento en la rótula alcanza el momento de
agrietamiento de la sección transversal Mcr, la tasa de disipación de energía es, por primera
vez, igual a la resistencia al agrietamiento:
123
2
m i = M cr ⇒ G i = R(0)
M cr F11o
;
G cr =
2
y
(I-6.27)
El primer momento de agrietamiento puede ser calculado mediante la teoría clásica de
concreto armado. Es bien sabido que el parámetro Mcr depende de los valores de carga axial n
en la rótula. En consecuencia, Gcr es también una función de la carga axial.
Para valores de momento superiores, se inicia la evolución del daño; el criterio de
Griffith define una relación entre estas dos variables:
2
m i F11o
= (1 − d i ) 2 G cr + q(1 − d i ) ln(1 − d i )
2
(I-6.28)
De acuerdo con las ecuaciones (I-6.27 y I-6.28), el momento es igual a Mcr para di igual a
cero; a medida que los valores de daño aumentan, el momento se incrementa hasta alcanzar un
máximo denominado Mu, para di igual a du y finalmente su valor es nulo para valores de daño
di igual a uno. El valor del momento último Mu de la sección transversal también puede ser
determinado mediante la teoría convencional de concreto armado y es función de la carga
2
axial en la rótula. Para estos valores, la función m i F11o / 2 alcanza un máximo:
2
M u F11o
= (1 − d u ) 2 G cr + q(1 − d u ) ln(1 − d u )
2
(I-6.29)
−2(1 − d u )G cri + q[ln(1 − d u ) + 1] = 0
(I-6.30)
Resolviendo el sistema de ecuaciones (I-6.29-I-6.30) se obtienen los valores de du y q.
Los últimos coeficientes son los correspondientes a la función de fluencia: my y c. Su
cálculo se describe a continuación. Cuando el momento en la rótula alcanza el valor del
momento de cedencia Mp, el correspondiente valor de daño dp también puede ser calculado
mediante el Criterio de Griffith:
124
2
M p F11o
2(1 − d p )
2
− G cri − q
ln(1 − d p )
(1 − d p )
=0
(I-6.31)
Adicionalmente, para este valor la función de fluencia es por primera vez igual a cero y la
rotación plástica es todavía nula, consecuentemente:
M p − (1 − d p )m y = 0
(I-6.32)
La expresión (I-6.32) permite la determinación del coeficiente my. El momento de fluencia
también es una función de la carga axial y puede ser calculado mediante la teoría clásica de
concreto armado.
Finalmente, el valor de la rotación plástica Φ pu que corresponde al momento último Mu
puede ser usado para el cálculo del parámetro c, es decir, la expresión f = 0 conduce a:
M u − (1 − d u )(cΦ pu + m y ) = 0
(I-6.33)
Se supone que los diagramas de interacción de Mcr, Mp, Mu y Φ pu pueden ser
calculados con una precisión razonable para secciones transversales de cualquier forma y
refuerzo. La rotación plástica última puede ser estimada como:
Φ pu ≅ χ up . l p
(I-6.34)
donde χ up es la curvatura última plástica y lp es una longitud equivalente de la rótula plástica.
Condiciones de admisibilidad termodinámicas
Los principios de la termodinámica imponen ciertas restricciones a las leyes de
evolución de las variables internas para que las mismas representen comportamientos
físicamente posibles. Estas restricciones son denominadas “desigualdades de admisibilidad
termodinámicas” y expresan el hecho de que durante los procesos inelásticos debe haber
125
disipación de energía. En consecuencia, se postulan dos desigualdades para cada rótula
inelástica, cada una asociada a la disipación de energía en una de las variables internas. Estas
desigualdades son:
d& i = ≥ 0
(mi−Xi) φ& ipt≥ 0
d& j = ≥ 0
(I-6.35)
(m j−X j) φ& pjt ≥ 0
La primera de estas desigualdades indica que en la rótula correspondiente, el incremento del
daño solo puede ser positivo o nulo. Físicamente esta restricción se puede entender como que
las grietas en el miembro solo pueden propagarse o no, pero no pueden desaparecer. La
segunda de las desigualdades se puede interpretar como que los incrementos de las rotaciones
plásticas deben tener el mismo signo de las acciones que las producen.
Daño unilateral en pórticos planos de concreto armado
Experimentalmente se ha observado que cuando las solicitaciones sobre un pórtico son
histeréticas, se produce un fenómeno de cierre y abertura de fisuras. Tal y como se ilustra en la
figura I-6.9, la ubicación de las fisuras producidas por momentos positivos y negativos no es
la misma. Las fisuras creadas en alguno de los casos, por ejemplo debido a momentos
positivos (figura I-6.9a), tienden a cerrarse cuando el momento cambia de signo (figura I6.9b). Se admite que el daño producido por un momento positivo o negativo no tiene
influencia en el comportamiento del elemento mientras las fisuras estén cerradas.
Para modelar matemáticamente este fenómeno, se introducen dos variables de daño
{D + } = (d i+ , d +j ) y {D − } = (d i− , d −j ) donde los superíndices + y – indican el daño, es decir, el
agrietamiento debido a momentos positivos y negativos respectivamente. A estas matrices se
las llamará daño positivo y daño negativo. La ley de estado (I-6.16) se generaliza como:
{Φ − Φ p } = [F(D + )] M
+
+ [F(D − )] M
−
(I-6.36)
Los términos [F(D + )] y [F(D − )] representan las matrices de flexibilidad de un miembro
agrietado y tienen la misma forma que en (I-6.16) solo que ahora dependen del daño positivo y
126
negativo respectivamente. Los términos M
+
y M
−
representan la parte positiva y negativa
de la matriz de esfuerzos generalizados. Esto es:
m
+
⎧m si m ≥ 0
⎪
=⎨
⎪⎩ 0 si m < 0
y
m
−
⎧m si m < 0
⎪
=⎨
⎪⎩ 0 si m ≥ 0
(I-6.37)
(b)
(a)
M+
M-
Figura I-6.9. Representación del daño para momentos positivo y negativo
Las leyes de evolución de las variables de daño se obtienen de igual manera a partir del
criterio de Griffith para lo cual se emplean ahora dos tasas de disipación de energía para cada
rótula. Las tasas de disipación para la rótula i son:
+
i
G =
F11o m i
2
+
+ 2
i
2(1 − d )
;
−
i
G =
F11o m i
2
−
− 2
i
2(1 − d )
(I-6.38)
Puede observarse que si el momento es negativo, la tasa de disipación de energía G+ es nula y
viceversa.
Las funciones de resistencia al agrietamiento tienen la forma general (I-6.26) pero
también dependen del daño positivo o negativo según sea el caso. De esta manera el criterio de
Griffith generalizado para la rótula i es:
G i+ = R i+ (d i+ );
G i− = R i− (d i− )
(I-6.39)
127
Las funciones R + y R − representan la resistencia al agrietamiento debido a acciones positivas
y negativas respectivamente y tienen la forma:
R i+ = G cr+ + q i+
ln(1 − d i+ )
;
1 − d i+
R i− = G cr− + q i−
ln(1 − d i− )
1 − d i−
(I-6.40)
La función de fluencia de la rótula i para el caso de daño unilateral se escribe como:
⎞
⎛ mi
mi
f i = max⎜⎜
− α i+ c i+ φ ip − (m +yi + β i+ c i+ p i ); −
+ c i− φ ip − (m −yi + β i− c i− p i ) ⎟⎟
+
−
1− di
⎠
⎝1− di
(I-6.41)
El valor absoluto de la expresión (I-6.18) ha sido sustituido por la evaluación del máximo de
dos expresiones. En el caso particular en el que los términos con superíndices + son iguales a
los de superíndices -, las expresiones (I-6.41) y (I-6.18) coinciden. La ley de evolución de las
deformaciones plásticas permanece inalterada, esto es, es igual a la expresión (I-6.19).
Las leyes de evolución del daño para la rótula i son:
⎧d& i+ = 0 si G i+ < R +
i
⎪
⎨
⎪⎩d& +i ≠ 0 si G +i = R +i
& + < R& +
o G
i
i
& + = R& +
y G
i
i
⎧d& i− = 0 si G i− < R −
i
⎪
⎨
⎪⎩d& −i ≠ 0 si G −i = R −i
& − < R& −
o G
i
i
& − = R& −
y G
i
i
(I-6.42)
Las condiciones de admisibilidad termodinámicas son:
d& i+ ≥ 0 ;
d& i− ≥ 0 ;
⎧⎛
⎞
mi
−(Xi+)⎟⎟(φ& ip ) ≥ 0 si φ ip > 0
⎪⎜⎜
+
−
⎠
⎪⎝ (1−d i )(1−d i )
⎨
⎞
mj
⎪⎛⎜
p
+ ⎟ &p
−
(
X
)
j ⎟ (φ j ) ≥ 0 si φ j > 0
⎪⎜ (1−d +)(1−d −)
j
j
⎠
⎩⎝
d& +j ≥ 0 ;
d& −j ≥ 0 ;
o
⎛
⎞
mi
⎜⎜−
+(Xi−)⎟⎟(φ& ip ) ≥ 0 si φ ip < 0
+
−
⎝ (1−d i )(1−d i )
⎠
o
⎛
⎞
mj
⎜−
+(X −j )⎟(φ& pj ) ≥ 0 si φ pj < 0
+
−
⎜ (1−d )(1−d )
⎟
j
j
⎝
⎠
(I-6.43)
128
Fatiga de bajo ciclaje en pórticos planos de concreto armado
En la fatiga de bajo ciclaje se considera la posibilidad de que el daño se incremente
durante las fases de carga aún cuando el valor máximo de la tasa de disipación de energía halla
sido alcanzado en el primer ciclo. Adicionalmente se considera que el incremento del daño es
nulo durante las descargas (ver Thomson et al. (1998) y Picón (1999)). Las leyes de evolución
del daño para acciones positivas y negativas para la rótula i son:
⎧−
(Gi+ )z
+
&
&
si Gi+ ≥ Gcr
⎪di = (Gi )
+
⎪
+ ∂R
(Ri+ )z +i
⎨
∂di
⎪
&d+ = 0.
⎪
si Gi+ < Gcr
i
⎩
+
⎧−
(Gi− )z
−
&
&
d
(
G
)
=
si Gi− ≥ Gcr
⎪i
i
−
− ∂R
⎪
(R−j )z −i
⎨
∂di
⎪
−
⎪
d& j = 0.
si Gi− < Gcr
⎩
−
(I-6.44)
donde Gi+, Gi- representan las fuerzas termodinámicas asociadas al daño positivo y negativo en
la rotula i, definidas en la expresión (I-6.38). Ri+, Ri- definen la resistencia al agrietamiento
para la parte positiva y negativa en la rótula i, formuladas en (I-6.40). Los parámetros z+ y zcontrolan el incremento del daño por fatiga de bajo ciclaje en cada ciclo de carga. Estos
parámetros son función del daño, mediante una relación cuadrática (Picón (1999)). El valor de
z disminuye al aumentar el daño y varía entre el intervalo de cero a treinta (0 ≤ z ≤ 30). Para
obtener el valor del parámetro se evalúa la siguiente expresión:
z = a o d 2 + a 1d + 30,
donde : a o =
2.5 + 30(du − 1)
, a 1 = −(a o + 30)
du (du − 1)
(I-6.45)
Donde d representa el daño en instante considerado y du define el daño último. Gcr es el
parámetro definido en la ecuación (I-6.27).
129
Capítulo I-7
Teoría de localización
La localización es un fenómeno que se produce durante la fase de ablandamiento en
materiales con comportamiento elastoplástico. En los medios continuos este fenómeno
consiste en la concentración de deformaciones plásticas en una zona relativamente pequeña
mientras las regiones vecinas permanecen prácticamente inalteradas. Esta zona se conoce
como banda de corte. Como consecuencia de la localización, se produce entonces una
discontinuidad en la tasa de deformaciones. En túneles superficiales, condiciones geotécnicas
desfavorables conjuntamente con una excavación inapropiada puede provocar la formación de
grandes bandas de corte en el suelo conduciendo eventualmente a su colapso. Problemas
similares se han encontrado en fallas de presas de tierra, muros de contención, fundaciones,
terraplenes, etc. El modelado numérico de la localización es entonces muy importante ya que
es un fenómeno que acelera el colapso de las estructuras. En la Universidad del Estado de
Luisiana (REU) estudiaron la formación de las bandas de corte a través de técnicas de
tomografía. En la figura I-7.1 se muestra una probeta de arena ensayada triaxialmente. En la
figura I-7.1b se puede observar la formación de la banda de corte en el espécimen después del
ensayo.
(a)
(b)
Figura I-7.1. Ensayo de compresión triaxial en arena realizado en La Universidad del Estado de Luisiana
130
I-7.1. Localización en el caso uniaxial
Considérese el medio continuo uniaxial de longitud L que se muestra en la figura I-7.2
(García et al. (1999)). Como se puede observar en esta figura, el desplazamiento en un
extremo está restringido y en el otro se impone una función de desplazamiento conocida
U d ( t ) . Las fuerzas de volumen son nulas. El sólido se discretiza utilizando dos elementos
finitos con desplazamientos lineales y deformaciones constantes (figura I-7.2) Puede
constatarse que en el caso considerado la solución de elementos finitos coincide con la
solución exacta.
Ud
L2
L
L1
Figura I-7.2. Medio continuo unidimensional y discretización por elementos finitos
Se supone un modelo elastoplástico degradable sin plasticidad como el usado para
materiales frágiles. La ley de estado correspondiente es:
{σ} = (1 − ω)[C]{ε}
(I-7.1)
Donde {σ} representa la matriz de esfuerzos generalizados, ω representa la variable de daño
isótropo, [C] la matriz de coeficientes elásticos y {ε} la matriz de deformaciones
generalizadas. En la figura (I-7.3) se representan las leyes de comportamiento de ambos
elementos simultáneamente. Para determinar el valor de la variable ω se introduce la función
de daño:
131
g(ω) = ε eq − R (ω)
(I-7.2)
Donde R(ω) es la función de resistencia al daño y ε eq es alguna invariante del tensor de
deformaciones. En consecuencia la ley de evolución del daño puede ser expresada como:
& =0
⎧ω
⎨
& ≠0
⎩ω
g(ω) < 0
g(ω) = 0
si
si
o
y
Esfuerzo
Elemento 1
g& (ω) < 0
g& (ω) = 0
(I-7.3)
Elemento 2
Después del máximo
Antes del máximo
ε1
ε1
ε2
ε2
Deformación
Figura I-7.3. Leyes de comportamiento y ecuación de equilibrio
Las ecuaciones de equilibrio establecen que el esfuerzo debe ser constante en el medio
continuo considerado y por lo tanto igual en ambos elementos. Esta ecuación de equilibrio se
expresa como:
N = σ1A = σ 2 A
(I-7.4)
donde N representa la fuerza axial en la barra, σ1 y σ 2 son los esfuerzos en los elementos 1 y
2, respectivamente y A es el área de la sección transversal de la barra. La ecuación de
equilibrio (I-7.4) puede ser representada gráficamente mediante una recta horizontal en la
figura (I-7.3).
132
La tercera ecuación del modelo, que relaciona los desplazamientos con las
deformaciones, es la ecuación de compatibilidad:
ε 1 L1 + ε 2 L 2 = U d
(I-7.5)
Donde ε1 y ε 2 representan las deformaciones unitarias en los elementos 1 y 2
respectivamente, L1 y L2 las longitudes de los mismos elementos y Ud el acortamiento total de
la barra. La ley de comportamiento (I-7.1) - (I-7.3), las ecuaciones de equilibrio (I-7.4) y la de
compatibilidad (I-7.5) definen completamente el modelo.
Considérese un incremento del desplazamiento impuesto sobre el medio, de tal manera
que la deformación unitaria del primer elemento corresponda a un punto de las gráficas
esfuerzo-deformación de la figura (I-7.3) que no ha alcanzado todavía el máximo de la curva.
Puede constatarse entonces que sólo existe una solución que verifica simultáneamente la
condición de equilibrio y las leyes de comportamiento de ambos elementos. Esta solución
impone una deformación en el segundo elemento igual a la del primero. En otras palabras, la
única solución posible corresponde a un estado de deformación constante en el medio
considerado.
Considérese ahora un incremento del desplazamiento impuesto tal que el punto
representativo del estado del elemento 1 esté justo después del máximo de la curva esfuerzodeformación. Ahora existen dos soluciones que verifican la condición de equilibrio y las leyes
de comportamiento. En la primera de ellas (figura I-7.4a), las deformaciones en ambos
elementos se mantienen iguales. En la segunda solución (figura I-7.4b) se produce una
descarga elástica en el segundo elemento y una concentración del daño en el primero (el daño
permanece constante en el segundo elemento). En esta solución aparece por lo tanto una
discontinuidad en el campo de deformaciones y de daño. Esta solución es llamada “solución
localizada” mientras que la primera es la “solución homogénea”. Esta discontinuidad no debe
ser confundida con las que aparecen en los análisis por el método de los elementos finitos.
Estas últimas se deben a errores cometidos al aproximar un problema continuo mediante uno
discreto y tienden a desaparecer cuando se refina la malla.
133
(a) Solución Homogénea
(b) Solución Localizada
Elemento 1
Elemento 1
Elemento 2
ε1
ε 2 ≠ ε1
ε1
ε2=ε1
Elemento 2
Deformación
Deformación
Figura I-7.4. (a) Solución Homogénea; (b) solución localizada
En la figura (I-7.5) se muestra la gráfica fuerza contra desplazamiento correspondiente
a cada una de las soluciones. Puede constatarse que el colapso del sólido (daño igual a uno en
al menos uno de los elementos) ocurre para un desplazamiento igual ML en la solución
homogénea y para un desplazamiento ML1 en la solución con localización. Esta última
solución es más estable y por lo tanto la más significativa físicamente. Sin embargo, la
longitud L1 es una propiedad de la malla de elementos finitos. Se dice por lo tanto que la
solución depende de la malla seleccionada. También puede observarse que la longitud del
primer elemento puede ser escogida arbitrariamente dentro del intervalo (0,L). Existe por lo
Fuerza
tanto un número infinito de soluciones posibles.
Solución Homogénea
Solución Localizada
Desplazamiento
M L1
ML
Figura I-7.5. Gráfico fuerza desplazamiento para el modelo de la figura I-7.2.
134
En el caso unidimensional, la localización solo es posible cuando la deformación
corresponde al máximo de la curva esfuerzo-deformación. En el caso general, “el máximo”
puede ser definido de innumerables maneras y debe por lo tanto escogerse aquel que
corresponde a la aparición de discontinuidades. El “máximo” correcto se denomina en la
literatura “criterio de localización” y se obtiene al plantear el problema en velocidades. En
conclusión, las soluciones localizadas son discontinuas, se presentan solo en la fase de
ablandamiento y aceleran el proceso de colapso de las estructuras, de allí la importancia de
identificar el criterio de localización correspondiente.
I-7.2. Criterio de localización de Rudnicki y Rice
Rudnicki y Rice (1975) propusieron un criterio de localización para medios continuos.
En el caso tridimensional los tensores de esfuerzos y deformaciones se representan
matricialmente como se indicó capítulo I-1 de la forma:
⎧ ε11 ⎫
⎧ σ11 ⎫
⎪ε ⎪
⎪σ ⎪
⎪ 22 ⎪
⎪ 22 ⎪
⎪⎪ε ⎪⎪
⎪⎪σ ⎪⎪
σ = ⎨ 33 ⎬ y ε = ⎨ 33 ⎬
⎪γ 23 ⎪
⎪σ 23 ⎪
⎪ γ 31 ⎪
⎪σ 31 ⎪
⎪ ⎪
⎪ ⎪
⎪⎩ γ 12 ⎪⎭
⎪⎩σ12 ⎪⎭
(I-7.6)
Considérese un medio continuo sometido a solicitaciones como se muestra en la figura
I-7.6a. Supóngase que la solución localizada produce una superficie de discontinuidad
r
identificada a través de su vector normal n . La discontinuidad en las deformaciones expresada
en términos de velocidades se puede escribir como:
+
−
1 ⎛⎜ ∂u& i+ ∂u& i− ∂u& j ∂u& j
+
−
&
&
&
−
+
−
[| ε ij |] = (ε ij − ε ij ) =
2 ⎜⎝ ∂x j ∂x j ∂x i ∂x i
⎞
⎟
⎟
⎠
(I-7.7)
Esta discontinuidad puede ser representada a través de la ecuación de compatibilidad de
Maxwell como:
135
[| ε& ij |] =
1
(p i n j + p j n i )
2
(I-7.8)
r
Donde p representa la magnitud del salto de velocidades y n un vector unitario perpendicular
a la superficie de discontinuidad.
(a)
(b)
Desplazamiento ui
x1
r
n
x2
Figura I-7.6. (a) Medio continuo sometido a solicitaciones, (b) Superficie de discontinuidad orientada según la
r
normal n
Para el caso del medio continuo mostrado en la figura I-7.6a, la ecuación de
compatibilidad de Maxwell tiene la forma:
⎧[| ε& 11 |] ⎫ ⎧ p1 n 1
⎫
⎪⎪
⎪⎪ ⎪⎪
⎪⎪
⎨[| ε& 22 |]⎬ = ⎨ p 2 n 2
⎬
⎪
⎪ ⎪
⎪
⎩⎪[| γ& 12 |]⎭⎪ ⎩⎪p1 n 2 + p 2 n 1 ⎭⎪
(I-7.9)
En notación matricial se escribe como:
⎧[| ε& 11 |] ⎫ ⎡ n 1
⎪⎪
⎪⎪ ⎢
{[| ε& ij |]} = ⎨[| ε& 22 |]⎬ = ⎢ 0
⎪
⎪ ⎢
⎪⎩[| γ& 12 |]⎪⎭ ⎢⎣n 2
0⎤
⎥ ⎧⎪ p1 ⎫⎪
n 2 ⎥ ⎨ ⎬ = [ N]{P}
⎥ ⎪⎩p 2 ⎪⎭
n 1 ⎥⎦
(I-7.10)
136
Ahora bien, en la superficie de discontinuidad debe existir un estado de equilibrio por
lo que la sumatoria de los vectores tensión (ver figura I-7.7) debe ser cero. En consecuencia se
tiene que:
[| Τ& i |] = [| σ& ij |]n j = 0
r
Ti+
(I-7.11)
ni
ni
r
Ti−
Figura I-7.7. Equilibrio a través de la superficie de discontinuidad
Para el ejemplo de la figura I-7.6a la ecuación de equilibrio a través de la superficie es:
⎧⎪[| Τ&1 |] ⎫⎪ ⎧⎪[| σ& 11 |]n 1 + [| σ& 12 |]n 2 ⎫⎪ ⎧⎪0⎫⎪
⎨
⎬=⎨
⎬=⎨ ⎬
⎪⎩[| Τ& 2 |]⎪⎭ ⎪⎩[| σ& 21 |]n 1 + [| σ& 22 |]n 2 ⎪⎭ ⎪⎩0⎪⎭
(I-7.12)
{[| Τ& |]} = [ N] t {[| σ& |]} = 0
(I-7.13)
En notación matricial:
137
La ley de comportamiento elástica (I-1.31) expresada matricialmente y en términos de
velocidades resulta en:
{[| σ& |]} = [K ]{[| ε& |]}
(I-7.14)
donde [K] es llamada matriz de rigidez tangente, que en el caso particular en el que no hay
daño ni plasticidad, es igual a la matriz de coeficientes elásticos [C] estudiada en el capítulo I1.
Introduciendo la ley de comportamiento (I-7.14) y la ecuación de compatibilidad de
Maxwell (I-7.10) en la ecuación (I-7.13) se obtiene:
{[| Τ& |]} = [ N] t {[| σ& |]} = [ N] t [K ]{[| ε& |]} = ([ N] t [K ][ N]){P} = 0
(I-7.15)
Para que esta igualdad se cumpla, se deben producir uno de los siguientes dos casos: a) {P} =
0 o b) ([N]t[K][N]) = 0, es decir que la matriz sea singular. En el primer caso no se produce la
solución localizada ya que el salto en la magnitud de velocidades es nulo y en el segundo caso,
si se consigue una dirección [N] que anule el término, se supone que habrá una solución
localizada. De allí que el criterio de localización se plantee como:
det([ N] t [K ][ N]) = 0
(I-7.16)
138