Transformada Z
Anuncio

eman ta zabal zazu
Universidad del País Vasco
Departamento de Arquitectura y Tecnología de Computadores
upv
ehu
Procesado digital de imagen y sonido
Tema 5_ Transformada Z
•
•
•
•
•
•
•
Definición
Propiedades principales
Aplicación a señales y sistemas LTI
Convergencia
Más propiedades
Forma compacta racional
Polos y ceros
–
–
Definición
Diagramas:
•
•
•
•
Transformada inversa
–
–
•
•
PDI 2007-08
Relación con la ROC
Causalidad y estabilidad.
Sistemas de fase mínima
Definición general
Cálculo si X(z) es racional
Señales y sistemas bidimensionales
Relación entre DTFT y transformada Z
5.1
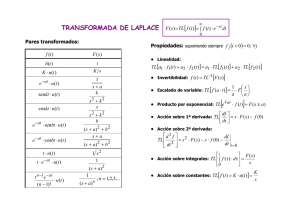
Transformada Z: definición
La definición matemática de la transformada Z es la siguiente:
X ( z ) = Z [x(n)] =
x (n)
→ X ( z )
Ζ
+∞
−n
x
(
n
)
z
con
∑
z ∈C
n = −∞
• Transforma una señal en tiempo discreto x(n) en una función polinómica
compleja de variable compleja.
• Forma alternativa de representar la señal. Los valores de la señal pasan
a ser los coeficientes de un polinomio en la variable compleja z.
x(n)
K
Z
Im
Im
z
X()
X(z)
K
n
x (n) = {K , x (−1), x(0), x (1), x (2), K}
Re
Re
X ( z ) = K + x( −1) z + x (0) + x (1) z −1 + x( 2) z −2 + K
• Para realizar la transformación no hay que realizar ningún cálculo
• Si tenemos que almacenar la señal almacenaremos los mismos valores.
• Usando este punto de vista (polinomios complejos en lugar de listas de
números) el tratamiento matemático de los sistemas LTI se simplifica.
PDI 2007-08
5.2
Transformada Z: principales propiedades
La transformada Z cumple tres propiedades interesantes:
Z
a1 x1 (n) + a2 x2 (n)
→
a1 X 1 ( z ) + a2 X 2 ( z )
• Linealidad:
+∞
∑ (a x (n) + a x (n))z
ya que
n = −∞
1 1
−n
2 2
+∞
= a1 ∑ x1 (n) z
−n
n = −∞
+ a2
+∞
∑ x ( n) z
n = −∞
−n
2
Z
• Desplazamiento en
x(n − k )
→
z −k X ( z)
el tiempo:
+∞
+∞
+∞
−n
−n −k
−k
ya que
∑ x ( n − k ) z = ∑ x ( n) z = z ∑ x ( n ) z − n
n = −∞
n = −∞
Z
x1 (n) ∗ x2 (n)
→
X1 ( z) X 2 ( z)
• Convolución:
+∞
ya que
∑ (x (n) ∗ x (n))z
n = −∞
PDI 2007-08
n = −∞
1
2
−n
+∞
+∞
= ∑ ∑ x1 (k ) x2 (n − k ) z − n
n = −∞ k = −∞
+∞
+∞
− n
= ∑ x1 (n) z ∑ x2 (n) z − n
n = −∞
n = −∞
5.3
Transformada Z: aplicación a sistemas LTI
Si utilizamos las transformadas Z de las señales entrada, salida y
respuesta a impulso
Z
Dominio n
x(n)
Dominio Z
X(z)
y(n)
h(n)
Y(z)
H(z)
• Convolución
Función de transferencia
y ( n) = h( n) ∗ x ( n)
H ( z) =
Y ( z) = H ( z) X ( z)
Y ( z)
X ( z)
• Ecuación en diferencias
N
N
∑a
k =0
M
k
y (n − k ) = ∑ bk x(n − k )
k =0
∑a z
k =0
M
Y ( z ) = ∑ bk z − k X ( z )
k =0
N
M
−k
∑ ak z Y ( z ) = ∑ bk z − k X ( z )
k =0
k =0
Y ( z) =
PDI 2007-08
k
−k
B( z )
X ( z)
A( z )
H ( z) =
B( z )
A( z )
5.4
ejercicio
A continuación se pueden ver la entrada x(n) y la salida y(n) obtenida al aplicar un
sistema LTI desconocido a esa entrada:
x(n) = {1, 1, 0, ...}
y(n) = {1, -1, 1, 0, ...]
↑
↑
a) Calcular la respuesta a impulso, suponiendo el sistema causal, con y sin
transformada Z
b) Escribir una ecuación en diferencias del sistema.
c) ¿Es estable el sistema?
PDI 2007-08
5.5
Transformada Z: convergencia
X(z) es una serie de potencias, y puede haber valores de z en los que no
converge. El conjunto de puntos en los que X(z) converge se llama Región de
convergencia (ROC)
z ∈ ROC
⇔
X (z ) < ∞
• Si la señal es finita la ROC ocupa todo el plano, excepto z = 0 y/o z = ∞
• Si la señal es infinita, expresando z en forma polar
X ( z) =
+∞
∑ x ( n) r
n = −∞
− n − jθn
e
≤
+∞
∑ x (n)r
− n − jθn
=
e
n = −∞
+∞
∑ x (n)r
n = −∞
+∞
+∞
= ∑ x (− n)r + ∑
n
n =1
n =0
−n
=
−1
∑ x (n)r
n = −∞
−n
+∞
+ ∑ x ( n) r − n
n =0
x (n)
rn
Si existe r1< ∞ tal que la 1ª suma converge, convergerá para r<r1
Si existe r2< ∞ tal que la 2ª suma converge, convergerá para r>r2
Por tanto la ROC será una región de forma anular, es decir:
r2 < z < r1
PDI 2007-08
5.6
Transformada Z: convergencia
Señales de duración finita
Causal
Anticausal
Bilateral
PDI 2007-08
Plano z completo
excepto z=0
Plano z completo
excepto z=∞
Plano z completo
excepto z=0 y z=∞
Señales de duración infinita
z > r2
Causal
.....
z < r1
Anticausal
.....
r2 < z < r1
Bilateral
.....
.....
5.7
Transformada Z: convergencia
En ocasiones se dibujan gráficos del módulo de la transformada Z
X (z )
Ejemplo
x(n) = 0.5n u (n)
R=2.5;
z=cplxgrid(31)*R;
X=z*0;
for i=0:200,
X=X+0.5^i*z.^(-i);
end
mesh(real(z),imag(z),abs(X))
axis([-R R -R R 0 2])
view([1 -2 1]),hold
circulo=0.5*exp(j*(0:50)*2*pi/50);
plot3(real(circulo),imag(circulo),zeros(1,51),'r');
plot3(0.5,0,0,'x')
PDI 2007-08
5.8
Transformada Z: otras propiedades
• Correlación:
Z
rx1x2 (n)
→
X 1 ( z ) X 2 ( z −1 )
• Teorema del valor inicial:
Si x(n) causal
• Escalado en el dominio z:
Z
a n x ( n)
→
X (a −1 z )
• Inversión temporal:
Z
x ( − n)
→
X ( z −1 )
• Conjugación:
Z
x ∗ (n)
→
X ∗ ( z∗ )
• Parte real:
Z
Re[x(n)]
→
• Parte imaginaria:
• Diferenciación en el dominio z:
• Multiplicación:
• Relación de Parseval:
PDI 2007-08
x(0) = lim X ( z )
z →∞
[
[
]
]
1
X ( z) + X ∗ ( z∗ )
2
1
Z
Im[x(n)]
→
X ( z) − X ∗ ( z∗ )
2
dX ( z )
Z
nx(n)
→
−z
dz
1
z −1
Z
x1 (n) x2 (n)
→
X
(
v
)
X
1
2 v dv
2πj ∫C
v
∞
1
1
∑ x1 (n) x2∗ (n) = 2πj ∫C X 1 (v) X 2∗ v∗ v −1dv
5.9
Transformada Z: forma compacta racional
A veces, la transformada Z puede escribirse en forma compacta como un
cociente de 2 polinomios en z de orden finito.
M
X ( z) =
∑b z
−k
∑a z
−k
k =0
N
k =0
k
=
B( z )
A( z )
k
¡Ojo! Señales distintas pueden tener la misma expresión X(z) en forma compacta.
En ese caso tendrán distinta ROC y es necesario especificarla.
Ej: Obtener la transformada Z en forma compacta de las siguientes señales:
PDI 2007-08
a)
a n u ( n)
b)
−a nu ( −n − 1)
5.10
Transformada Z: forma compacta y convergencia
X (z )
Ejemplo
1
X ( z) =
1 − 0.5 z −1
R=2.5;
z=cplxgrid(31)*R;
X=1./(1-0.5*z.^(-1));
X(1,:)=zeros(1,63);
mesh(real(z),imag(z),abs(X))
axis([-R R -R R 0 2]),view([1 -2 1]),hold
circulo=0.5*exp(j*(0:50)*2*pi/50);
plot3(real(circulo),imag(circulo),zeros(1,51),'r');
plot3(0.5,0,0,'x')
PDI 2007-08
5.11
Algunos pares de transformadas Z
Secuencia temporal
δ ( n − m)
a nu (n)
− a nu (−n − 1)
na n u (n)
0 ≤ n ≤ N −1
resto
cos(ω 0 n)u (n)
sin(ω 0 n)u (n)
PDI 2007-08
z −m
1
1 − az −1
1
1 − az −1
az −1
ROC
Todo z excepto 0 (m>0) o ∞ (m<0)
z >a
z<a
(1 − az )
z >a
(1 − az )
z<a
−1 2
− na n u (−n − 1)
a n ,
0,
Transformada
az −1
−1 2
1− aN z−N
1 − az −1
1 − cos ω 0 z −1
1 − 2 cos ω 0 z −1 + z − 2
sin ω 0 z −1
1 − 2 cos ω 0 z −1 + z − 2
z >0
z >1
z >1
5.12
Transformada Z: polos y ceros
Se llama ceros a los valores de z para los que X(z)=0
Se llama polos a los valores de z para los que X(z)=∞
M
La expresión racional compacta:
X ( z) =
B( z )
=
A( z )
∑b z
−k
∑a z
−k
k =0
N
k =0
k
k
puede escribirse utilizando las raíces de los polinomios numerador y denominador:
(
(
)(
)(
) (
) (
)
)
b0 1 − z1 z −1 1 − z 2 z −1 L 1 − z M z −1
N − M ( z − z1 )( z − z 2 )L ( z − z M )
X (z) =
=
Gz
(z − p1 )(z − p2 )L (z − p N )
a0 1 − p1 z −1 1 − p2 z −1 L 1 − p N z −1
Se dice que X(z) tiene:
•
M ceros z1, z2, ...
•
•
N polos p1, p2, ...
Ganancia
G = b0 / a0
Im
Re
La transformada Z puede mostrarse gráficamente mediante su diagrama de polos
y ceros. Los polos se representan mediante aspas y los ceros mediante círculos
PDI 2007-08
5.13
Transformada Z: polos y ROC
Si se dispone de una expresión de la transformada Z que utilice polos y
ceros:
(
(
)(
)(
) (
) (
)
)
B( z )
1 − z1 z −1 1 − z 2 z −1 L 1 − z M z −1
X ( z) =
=G
A( z )
1 − p1 z −1 1 − p2 z −1 L 1 − p N z −1
Las posiciones de los polos determinan la frontera de la ROC, ya que la
ROC no puede contenerlos.
Si x(n) es causal, la ROC se extiende del polo más externo al infinito
Ej:
x(n) causal
j 2
1 − 0.5 z −1
X ( z) = 2
1 + 2 z −2
ROC
0.5
−j 2
PDI 2007-08
5.14
Diagrama de polos: estabilidad y causalidad
• Sistema LTI causal equivale a decir h(n) causal y por tanto:
La ROC de H(z) es el exterior del polo de mayor módulo
• Sistema LTI estable equivale a decir h(n) absolutamente sumable, y por tanto en
puntos de la circunferencia unidad:
H ( z ) z =1 =
es decir:
∑ h(n)(z )
+∞
n = −∞
−n
z =1
≤
+∞
∑
n = −∞
( )
h( n) z
−n
z =1
=
+∞
∑ h( n) < ∞
n = −∞
La ROC de H(z) incluye la circunferencia unidad
• En un sistema LTI causal, estable equivale a decir:
Todos los polos están en el interior de la circunferencia unidad
ROC
Causal
Inestable
PDI 2007-08
ROC
No causal
estable
Causal
estable
No causal
inestable
5.15
Diagrama de polos: sistemas de fase mínima
• Un sistema LTI T2 se dice inverso de otro T1 si:
h1 ( n) ∗ h2 (n) = δ ( n)
o
H 2 ( z) =
x(n)
1
H1 ( z )
x(n)
h1(n)
h2(n)
• Si el sistema tiene transformada Z racional:
B( z )
H1 ( z ) =
⇒
A( z )
A( z )
H 2 ( z) =
B( z )
• Se llama sistema de fase mínima a un sistema LTI estable y causal y
con inverso estable y causal.
Un sistema LTI causal será de fase mínima si todos sus polos y ceros
se encuentran dentro de la circunferencia unidad.
PDI 2007-08
5.16
Transformada Z inversa
A partir de la definición de la transformada Z y utilizando el teorema
integral de Cauchy, puede probarse que la transformada inversa Z puede
obtenerse mediante la expresión:
1
n −1
x ( n) =
X
(
z
)
z
dz
∫
C
2πj
Siendo C un contorno cerrado interior a la ROC, recorrido en sentido
antihorario y que contenga el origen.
Pero nunca utilizaremos esta expresión, pues vamos a trabajar con
señales y sistema con transformada z racional y en esos casos existen
métodos más sencillos
PDI 2007-08
5.17
Transformada Z inversa si X(z) racional
Dada X(z) en forma racional hay dos métodos que podemos utilizar para obtener la
transformada inversa:
1. Expansión en serie de potencias:
• Se divide B(z) entre A(z) obteniendo una suma infinita.
• Hay que tener en cuenta la ROC para decidir en que orden se efectúa la división.
• No produce una expresión cerrada.
2. Expansión en fracciones simples:
• Partiendo de la expresión de X(z) con polos y ceros se descompone en suma de
expresiones simples con transformada conocida..
∏ (1 − z z )
M
−1
k
G
k =1
N
∏ (1 − p z )
−1
k
=
M −N
∑C z
k =0
k
−k
A1
A2
Ai + Ai +1 z −1 + L + Ai + m z − m
+
+
+L+
+L
−1 m
1 − p1 z −1 1 − p2 z −1
1 − pi z
(
)
k =1
Se obtiene
dividiendo si
M≥N
Polos simples
Polo de multiplicidad m
• Hay que tener en cuenta la ROC para elegir la transformada inversa de cada
sumando
• Produce expresiones cerradas.
PDI 2007-08
5.18
Transformada Z inversa si X(z) racional
Ej:
PDI 2007-08
a)
2 − z −1
X ( z) =
1 + 2 z −2
ROC : z > 2
b)
2 − z −1
X ( z) =
1 + 2 z −2
ROC : z < 2
c)
X ( z) =
1
1 − 1.5 z −1 + 0.5 z − 2
ROC : z > 1
d)
X ( z) =
1
1 − 1.5 z −1 + 0.5 z − 2
ROC : z < 0.5
e)
X ( z) =
1
1 − 1.5 z −1 + 0.5 z − 2
ROC : 0.5 < z < 1
5.19
Señales y sistemas bidimensionales
• La transformada Z puede generalizarse para señales bidimensionales:
Ζ
x ( m, n )
→
X ( z1 , z 2 )
X ( z1 , z2 ) = Z [x(m, n)] =
+∞
∑
+∞
∑ x(m, n) z1 z2
−m
−n
con
m = −∞ n = −∞
z1 , z2 ∈ C
• La descripción recursiva de un sistema IIR bidimensional puede hacerse
mediante una función de transferencia que utilice la transformada Z
bidimensional.
M1
∑
H ( z1 , z 2 ) =
M2
∑ bk1k2 z1 1 z2
−k2
∑ ak1k2 z1 1 z2
−k2
k1 = 0 k 2 = 0
N1
N2
∑
−k
−k
=
B ( z1 , z 2 )
A( z1 , z 2 )
k1 = 0 k 2 = 0
• Sin embargo, se pierde la simplicidad del caso monodimensional y por ello
su uso es poco frecuente
(¿Convergencia, polos, estabilidad, ...?)
PDI 2007-08
5.20
Relación entre DTFT y transformada Z
Observando las definiciones de la transformada Z y la transformada de Fourier
de una señal discreta:
Transformada Z
Transformada de Fourier
X ( z) =
+∞
∑ x ( n) z
−n
con z ∈ C
X (F ) =
n = −∞
+∞
∑ x ( n )e
− j 2πFn
con F ∈ R
n = −∞
podemos ver que evaluando la transformada Z sólo para los valores de z que
se encuentran en la circunferencia de radio unidad obtenemos la
transformada de Fourier
X ( z )]z =e j 2πF =
∑ x(n)(e
+∞
n = −∞
)
j 2πF − n
=
+∞
∑ x ( n )e
− j 2πFn
= X (F )
n = −∞
Im z
e j 2πF
2πF
Re z
1
PDI 2007-08
0 ≤ 2πF < 2π
0 ≤ F <1
5.21
Relación entre DTFT y transformada Z. Ejemplo 2
H (z )
z −1 − z −2
H ( z) =
1 − 1.2732 z −1 + 0.81z − 2
H (F )
PDI 2007-08
5.22
Relación entre DTFT y transformada Z. Ejemplo 1
h( n) = {1,1,1,1,1}
R = 1.5; z = cplxgrid(31)*R;
H (z )
Hz = 1 + z.^(-1) + z.^(-2) + z.^(-3) + z.^(-4);
F = 0:0.02:1; eF = exp(j*2*pi*F);
HF = 1 + eF.^(-1) + eF.^(-2) + eF.^(-3) + eF.^(-4);
ejes = [-1.5 1.5 -1.5 1.5 0 6];
subplot(2,2,1),axis(ejes),hold, view(15,50)
mesh(real(z),imag(z),abs(Hz))
subplot(2,2,3),axis(ejes),hold, view(15,50)
plot3(real(eF),imag(eF),zeros(1,51),'r');
plot3(real(eF),imag(eF),abs(HF));
subplot(2,2,4),plot(F,abs(HF))
H (F )
PDI 2007-08
5.23
Resumen de las descripciones de sistemas LTI más habituales
FIR: (Finite Impulse Response)
si n = 0, K, M
h
h ( n) = n
0
en caso contrario
Respuesta a impulso finita
M
y (n) = ∑ hk x(n − k )
k =0
Ecuación no recursiva
M
H ( z ) = ∑ hk z −k
Función de transferencia polinómica
k =0
M
H ( F ) = ∑ hk e − j 2πFk
k =0
Respuesta frecuencial
IIR: (Infinite Impulse Response)
si n = 0, K, ∞
h
h ( n) = n
0
en caso contrario
N
M
k =0
k =0
∑ ak y (n − k ) = ∑ bk x(n − k )
M
H ( z) =
∑b z
−k
∑a z
−k
k =0
N
k =0
M
H (F ) =
=
B( z )
A( z )
− j 2πFk
∑a e
− j 2πFk
k =0
N
Ecuación en diferencias recursiva
Función de transferencia racional
k
∑b e
k =0
PDI 2007-08
k
Respuesta a impulso infinita
k
Respuesta frecuencial
k
5.24