CAPITULO II ESPECIFICACIONES TÉCNICAS DE LOS TRABAJOS
Anuncio

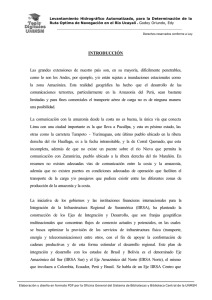
Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley CAPITULO II ESPECIFICACIONES TÉCNICAS DE LOS TRABAJOS 2.1 POSICIONAMIENTO GEODÉSICO La Geodesia, ciencia que estudia la forma, dimensiones y campo de gravedad de la tierra nos permite determinar con gran precisión la posición de un punto (Latitud y longitud), sobre una superficie matemática denominada Elipsoide, Ejemplos de elipsoides incluyen WGA-1984, Internacional, Clarke 1866 y Bessel. Cada elipsoide tiene un punto fundamental ó Datum, punto desde el cual se extiende la Red Geodésica que cubre una determinada región. La Red Geodésica Nacional esta referida al Datum Provisional Sudamericano 1956, Elipsoide Internacional. Sin embargo en la actualidad con el advenimiento de la tecnología del Sistema de Posicionamiento Global (GPS), se esta emigrando al Sistema Geodésico Mundial (WGS 84), densificándose una red Geodésica Satelital integrada al Sistema de Referencia Geodésico para América del Sur (SIRGAS). 2.1.1 GESTIÓN DE PUNTOS GEODÉSICOS En nuestro país el IGN; se ha encargado de la red Geodésica SIRGAS, a partir de 1998 ha actualizado toda la red con equipos GPS Geodésicos de doble frecuencia, estableciéndose en las siguientes ordenes: • Orden 0 • Orden Primario A • Orden Primario B • Orden Secundario C Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley A continuación se presenta la red geodésica nacional GPS-SIRGAS, donde lo mas destacable es la existencia de 4 puntos de orden cero: ubicadas en Arequipa, Lima, Piura e Iquitos. Entre estos 4 puntos la estación Characato de Arequipa, es la que esta constantemente comunicado con la NASA. En la Figura 2.1 se puede observar las 4 estaciones de orden cero que han sido enlazadas a la red del nivel medio del mar para costa, sierra y selva, obteniéndose las elevaciones ortométricas a través del Modelo Geoidal Gravimétrico EGM-96. FIGURA 2.1 Estaciones de la red geodésica nacional GPS – Sirgas Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley 2.1.2 CLASIFICACIÓN DE LOS LEVANTAMIENTOS GEODÉSICOS Con propósitos de clasificación de los levantamientos geodésicos se establecen los siguientes órdenes y clases de precisión relativa, asociados con valores de esta última que es posible obtener entre puntos enlazados directamente, con un nivel de confianza del 95% y en tanto se observen las normas del caso: CUADRO 2.1 Clasificación de los levantamientos geodésicos Cabe resaltar que antiguamente para la clasificación de los levantamientos geodésicos se establecieron otro tipo de ordenes que fueron los de 1º, 2º y 3º orden, cuyo grado de precisión están por debajo del orden C de esta nueva clasificación. En las órdenes 0, A, B, se aplican básicamente las técnicas diferenciales del Sistema de Posicionamiento Global y el orden C esta vigente para los levantamientos geodésicos convencionales con métodos tradicionales, siendo posible la aplicación de técnicas diferenciales del Sistema de Posicionamiento Global en este orden. Orden 0.- Los levantamientos geodésicos horizontales que se hagan dentro de este orden estarán destinados a estudios sobre deformación regional y global de la corteza terrestre y de efectos geodinámicos y en general cualquier trabajo que requiera una precisión de una parte en 100'000,000. Orden A.- Deberá aplicarse para aquellos trabajos encaminados a establecer el sistema geodésico de referencia continental básico, a levantamientos Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley sobre estudios de deformación local de la corteza terrestre, así como cualquier levantamiento que requiera una precisión de 1:10'000,000. Orden B.- Se destinarán a levantamientos de densificación del sistema geodésico de referencia nacional, conectados necesariamente a la red básica; trabajos de ingeniería de alta precisión, así como de geodinámica. Los trabajos que se hagan dentro de esta clasificación deberán integrarse a la red geodésica básica nacional y ajustarse junto con ella, dando como resultado una precisión no menor a 1:1,000,000. Orden C.- Los levantamientos geodésicos horizontales que se hagan dentro de este orden deberán destinarse al establecimiento de control suplementario en áreas metropolitanas, al apoyo para el desarrollo de proyectos importantes de ingeniería, con fines de investigación científica, y en general a cualquier trabajo que requiera una precisión no menor a 1:100,000, y debiéndose ligar a la red geodésica básica o a su densificación. El orden requerido de precisión para clasificar un vértice obliga a cumplir con los requisitos indicados en el Cuadro 2.2 en la que se especifican características del equipo en función de las frecuencias, número de sesiones, tiempos mínimos de medida por sesión, observaciones meteorológicas en las estaciones de observación, número de veces que se debe de medir la antena por sesión, número de receptores que participan en medida simultánea, y número y orden de las estaciones con que se debe diferenciar. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley CUADRO 2.2 Lineamientos para levantamientos GPS de acuerdo a su clasificación D.F..- Doble frecuencia. OP..- Opcional el uso de doble frecuencia En el Presente proyecto se ha trabajado dentro de la precisión relativa para redes secundarias (1:100,000) sin embargo en los trabajos de posicionamiento de redes primarias con equipos GPS Geodésicos Glonass se ha obtenido precisiones entre el grado A y B. 2.2 LEVANTAMIENTO TOPOGRÁFICO La Topografía es la ciencia que estudia el conjunto de procedimientos para determinar las posiciones de puntos sobre la superficie de la tierra, por medio de medidas según los 3 elementos del espacio. Estos elementos pueden ser: dos distancias y una elevación, o una distancia, una dirección y una elevación. Para distancias y elevaciones se emplean unidades de longitud (en sistema métrico decimal), y para direcciones se emplean unidades de arco (grados sexagesimales). Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley El conjunto de operaciones necesarias para determinar las posiciones de puntos y posteriormente su representación en un plano es lo que se llama comúnmente "Levantamiento". La mayor parte de los levantamientos, tienen por objeto el cálculo de superficies y volúmenes, y la representación de las medidas tomadas en el campo mediante perfiles y planos, por lo cual estos trabajos también se consideran dentro de la topografía. El levantamiento topográfico de las riberas y de los malos pasos, se realizó mediante el uso de una Estación Total. Las Estaciones Geodésicas de apoyo utilizadas son las establecidas mediante los GPS de Doble Frecuencia. Las Estaciones Totales pertenecen a una nueva generación de instrumentos topográficos. Su probado diseño constructivo y las modernas funciones ayudan al usuario a aplicar los instrumentos de modo eficiente y preciso. Además, los elementos innovadores, tales como la plomada láser o los tornillos de ajuste sin fin, contribuyen a facilitar de modo considerable las tareas topográficas cotidianas. 2.2.1 TIPOS DE LEVANTAMIENTOS TOPOGRÁFICOS De terrenos en general - Marcan linderos o los localizan, miden y dividen superficies, ubican terrenos en planos generales ligando con levantamientos anteriores, o proyectos obras y construcciones. De vías de comunicación - Estudia y construye caminos, ferrocarriles, canales, líneas de transmisión, etc. De minas - Fija y controla la posición de trabajos subterráneos y los relaciona con otros superficiales. Levantamientos catastrales - Se hacen en ciudades, zonas urbanas y municipios, para fijare linderos o estudiar las obras urbanas. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley Levantamientos aéreos - Se hacen por fotografía, generalmente desde aviones y se usan como auxiliares muy valiosos de todas las otras clases de levantamientos. 2.2.2 FUENTES DE ERROR Los errores se dividen en dos clases: Sistemático.- En condiciones de trabajo fijas en el campo son constantes y del mismo signo y por tanto son acumulativos, por ejemplo: en medidas de ángulos, en aparatos mal graduados o arrastre de graduaciones en el transito, cintas o estadales mal graduadas, error por temperatura. Accidentales.- Se dan indiferentemente en un sentido o en otro y por tanto puede ser que tengan signo positivo o negativo, por ejemplo: en medidas de ángulos, lecturas de graduaciones, visuales descentradas de la señal, en medidas de distancias, et.. Muchos de estos errores se elimina por que se compensan. 2.3 CONTROL VERTICAL Para el Control Vertical se podrá utilizar el método de nivelación geométrica, diferencial, o el método de nivelación trigonométrica. La selección de uno, cualquiera de ellos, deberá estar ligado a consideraciones relacionadas con el propósito, utilidad de levantamiento y capacidad relativa para producir los resultados esperados, los que deben formar parte de los criterios contemplados en el preanálisis y diseño del anteproyecto. Nivelación Geométrica (diferencial).- La nivelación geométrica constituye el método clásico utilizado para el desarrollo de los levantamientos geodésicos verticales, mediante un procedimiento que determina directamente la diferencia de altura entre puntos vecinos, por la medida de la distancia vertical existente entre dichos puntos y un plano horizontal local definido a la altura del instrumento que se utilice para hacer dicha medida. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley Nivelación Trigonométrica.- La nivelación trigonométrica sigue en orden de importancia a la anterior y consiste en la determinación indirecta de diferencia de alturas entre puntos vecinos mediante la medida de la distancia existente entre ambos y del ángulo vertical que contiene a dicha línea, con respecto al plano horizontal local de cualquiera de los puntos. Por su naturaleza indirecta y por estar más afectado por errores sistemáticos que en el caso de nivelación geométrica, el método trigonométrico produce resultados de menor precisión. 2.3.1 CLASIFICACIÓN DE LOS CONTROLES VERTICALES Con propósitos de clasificación de los Controles Verticales, se establecen los siguientes órdenes y clases de precisión, limitados a la nivelación diferencial y asociados con los valores de dicha exactitud que es posible obtener entre puntos enlazados directamente, con un nivel de confianza del 95% y en tanto se observen las normas del caso; el indicador para cada orden y clase se da en función de la tolerancia para el error de cierre altimétrico de las nivelaciones desarrolladas en líneas o circuitos cerrados, con secciones corridas ida y vuelta. CUADRO 2.3 Clasificación de los controles verticales ORDEN CLASE PRECISION (mm) Primer Única ±4 k Segundo Única ±8 k Tercer Única ± 12 k En estas expresiones, k es la distancia de desarrollo de la nivelación en un solo sentido, entre puntos de elevación conocida, expresada en kilómetros. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley Para el presente trabajo se desarrollo el control vertical mediante nivelación diferencial, desde un BM de altura conocida, con la finalidad de determinar las cotas del nivel de río. El error de llegada de la nivelación esta sujeto a la especificación técnica de nivelación diferencial de 3er Orden Geodésico el cual tiene la siguiente fórmula de error de llegada. Error = 12 k mm LEVANTAMIENTO HIDROGRÁFICO Los levantamientos hidrográficos están experimentando cambios fundamentales en la tecnología de medición. Los sistemas acústicos multihaz y láser aerotransportados proveen ahora una cobertura y medición del fondo marino casi total comparada con el anterior muestreo por perfiles batimétricos. La capacidad de posicionar los datos con exactitud en el plano horizontal ha crecido enormemente gracias a la disponibilidad de sistemas de posicionamiento por satélite, particularmente cuando se recurre a técnicas diferenciales. Este avance en la tecnología ha sido particularmente significativo, ya que los sistemas de posicionamiento hoy disponibles permiten una exactitud mayor que los datos en los cuales se basan las cartas. Debe notarse, no obstante, que la precisión e integridad de un levantamiento hidrográfico nunca pueden alcanzar la de la cartografía terrestre. El creciente uso que hacen los navegantes de los sistemas de posicionamiento por satélite, combinado con la disminución de costos y la precisión mejorada que brindan estos sistemas (superiores a los sistemas precisos de navegación con apoyo terrestre), han alentado a las organizaciones hidrográficas a utilizar para todos los levantamientos futuros de Orden Especial y Orden 1, sistemas que soportan una precisión en el posicionamiento igual o mejor que la que disponen los navegantes. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley FIG URA 2.2 Sistemas acústicos multihaz y láser aerotransportado El equipo actual para la medición de profundidades ha sido evaluado por el grupo de trabajo como sigue: Las sondas de haz simple han alcanzado una precisión sub-decimétrica en aguas poco profundas. El mercado ofrece una variedad de equipos con diferentes frecuencias, repetición de pulsos, etc, y es posible satisfacer las necesidades de la mayoría de los usuarios y, en particular, las de los hidrógrafos. La tecnología de los equipos de sonar lateral también ha alcanzado un gran Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley nivel de detección y definición de obstáculos del fondo. Aún así, hoy en día, su uso está limitado por la baja velocidad (5-6 nudos como máximo) en la que puede ser operado; es ampliamente utilizado para levantamientos de puertos y canales navegables para asegurar la detección de obstáculos entre las líneas de sondeo medidas. Muchos organismos hidrográficos consideran su uso obligatorio en esas áreas, a menudo prescribiendo superposiciones del 100% o más. La tecnología de las sondas acústicas multi-haz se está desarrollando con rapidez y ofrece un gran potencial para lograr una investigación precisa y total del fondo, siempre que se use con los procedimientos apropiados y a condición de que la resolución de los sistemas sea la adecuada para la apropiada detección de peligros a la navegación. El sondeo láser aerotransportado es una nueva tecnología que puede ofrecer sustanciales aumentos de productividad para levantamientos en aguas poco profundas y claras. Estos sistemas de sondeo son capaces de medir profundidades de 50 m o más. Es probable que muchos levantamientos hidrográficos continúen siendo realizados con sondadores de haz simple que sólo muestran perfiles discretos del fondo, mientras que las técnicas señaladas arriba, que brindan una cobertura del fondo del 100% posiblemente sólo sean usadas en áreas críticas. Esta presunción llevó a la decisión de retener el concepto de separación entre líneas de sonda, aunque ya no estén relacionadas directamente con la escala del levantamiento. Los resultados óptimos se logran cuando se usan en conjunto procedimientos y equipos apropiados junto con la experiencia y el entrenamiento del hidrógrafo. La importancia del juicio profesional no puede ser sobrevalorada. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley 2.3.2 CLASIFICACIÓN DE LEVANTAMIENTOS Según la Organización Hidrográfica Internacional (OHI), para clasificar de una manera sistemática los diferentes requerimientos de precisión en las áreas que deben ser levantadas, se han definido cuatro órdenes de levantamientos. Orden Especial -Los levantamientos hidrográficos de Orden Especial se aproximan a las normas de ingeniería y la intención es que su uso se limite a áreas críticas específicas con un margen mínimo bajo la quilla y donde las características del fondo sean potencialmente peligrosas para las embarcaciones. Estas áreas deben ser determinadas explícitamente por la organización responsable de la calidad del levantamiento. Son ejemplos de las mismas puertos, fondeaderos, y canales críticos asociados. Todas las fuentes de error deben ser minimizadas. El Orden Especial requiere el uso de líneas de sonda poco separadas, junto con el uso de sonar lateral, equipos multi-transductores o sondadores acústicos multihaz de alta resolución, para conseguir una cobertura del 100% del fondo. Debe asegurarse que las formas cúbicas mayores de 1 m puedan ser discriminadas por el equipo de sondeo. El uso de sonar lateral junto con un sondador acústico multihaz puede ser necesario en áreas donde puedan encontrarse obstáculos delgados y peligrosos. Orden 1 -Los levantamientos hidrográficos de Orden 1 están concebidos para puertos, canales de acceso a puertos, derrotas recomendadas, canales de navegación interior, y áreas costeras de alta densidad de tráfico comercial donde el margen bajo la quilla es menos crítico y las propiedades geofísicas del fondo son menos peligrosas para las embarcaciones (por ejemplo, fondo de arena o lodo blando). Los levantamientos de Orden 1 deberían limitarse a áreas con una profundidad menor de 100 m. Aunque los requerimientos para la investigación del fondo son menos rígidos que los correspondientes al Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley Orden Especial, se requiere una cobertura total del fondo en áreas seleccionadas donde las características del fondo y el riesgo de obstrucciones son potencialmente peligrosos para las embarcaciones. Para estas áreas, debe asegurarse que las formas cúbicas mayores de 2 m puedan ser discriminadas por los equipos de sondeo en profundidades de hasta 40 m o que en áreas investigadas más profundas se puedan detectar los obstáculos que superen, en dimensión, el 10% de la profundidad. Orden 2 -Los levantamientos hidrográficos de Orden 2 se proponen para áreas de profundidad menor que 200 m no cubiertas por el Orden Especial o el Orden 1, y en las que una descripción general de la batimetría es suficiente para asegurar que no existen obstrucciones en el fondo que pudieran poner en peligro las embarcaciones que se supone transitarán o trabajarán en el área. Este es el criterio para una variedad de usos marítimos para los cuales no se justifican levantamientos hidrográficos de órdenes superiores. Orden 3 -Los levantamientos hidrográficos de Orden 3 se proponen para todas las áreas no cubiertas por el Orden Especial y los Ordenes 1 y 2, en profundidades mayores a 200 m. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley CUADRO 2.4 Resumen de normas mínimas para levantamientos hidrográficos ORDEN ESPECIAL 1 2 3 Ejemplos de áreas típicas Puertos, áreas de amarre y canales críticos asociados con márgenes mínimos bajo la quilla Puertos, canales de acceso a puertos, derrotas recomendadas y ciertas áreas costeras con profundidades de hasta 100 m Áreas no descritas en Orden Especial y Orden 1, o áreas de hasta 200 m de profundidad Zonas costa afuera no descritas en Orden Especial, y Ordenes 1 y 2 Exactitud 2m 5 m + 5% de la 20 m + 5% de la 150 m + 5% de la profundidad profundidad profundidad a=0,25 m b=0,0075 a=0,5 m b=0,013 a=1,0 m b=0,023 Igual que en Orden 2 Obligatorio (2) Requerido en áreas seleccionadas (2) Puede ser requerido No aplicable en áreas seleccionadas Formas cúbicas > 2 metros en profundidades de hasta 40 m; 10% de las profundidades mayores de 40 m Igual al Orden 1 No aplicable 3-4 x profundidad promedio ó 200 m, la que sea mayor 4 x profundidad promedio Horizontal (95% de nivel de confianza) Exactitud para la profundidad reducida (95% de nivel de Confianza) (1) Investigación del 100% del fondo Formas cúbicas > Capacidad del sistema de detección 1 metro (3) Máxima separación entre líneas (4) No aplicable, dada la obligación de una investigación del 100% 3 x profundidad promedio ó 25 m, la que sea mayor (1) Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley Para calcular el límite del error en la exactitud de la profundidad, los valores correspondientes de "a" y "b" dados en el Cuadro 2.4 deben ser introducidos en la fórmula +V [a +(b*d) ] 2 2 donde: error de profundidad constante (por ejemplo: la suma de todos los errores constantes) error dependiente de la profundidad (por ejemplo: la suma de todos los errores dependientes) factor del error dependiente de la profundidad profundidad a b*d b d (2) Para fines de seguridad náutica, el uso de un rastreo mecánico precisamente especificado para asegurar un margen de seguridad mínimo en el área puede ser considerado suficiente para los levantamientos de Orden Especial y Orden 1. (3) El valor de 40 m ha sido escogido considerando el máximo calado esperado de los buques. (4) La separación entre líneas puede ser aumentada si se usan procedimientos para asegurar una densidad de sondeo adecuada. 2.3.3 SISTEMA DE POSICIONAMIENTO El sistema de posicionamiento mas recomendable hoy son los DGPS, permite ubicarse en cualquier lugar de la tierra en cualquier instante, aun bajo las condiciones climatológicos mas adversas, y tener la posición de lugar con una precisión de centímetros. Hay otros equipos que dan menores precisiones que sin embargo no serian recomendable pues aprovecharemos la posibilidad que da el mercado y proporcionar la mayor precisión posible, Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley pues estos equipos se pueden usar igualmente para sistema de posicionamientos mas precisos aun, cambiando alguna configuración y usando un sistema de post-procesamiento. La precisión del equipo se consigue pagando una suscripción anual de una empresa quien brinda la señal y la precisión que se especifica. La exactitud de una posición es la exactitud en la posición de uno que debe ser situada en el marco de referencia geodésico. En la Figura 2.3 se muestra un esquema de trabajo para posicionamiento con DGPS en tiempo real. Las posiciones deben ser referidas a un sistema de referencia geodésico, recomendándose el Sistema Geodésico Mundial (WGS 84). Si excepcionalmente las posiciones se refieren al datum horizontal local, este datum local debe estar vinculado a un sistema de referencia geocéntrico, como el WGS 84. FIGURA 2.3 Esquema de trabajo para posicionamiento con DGPS en tiempo real Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley 2.3.4 MEDICIÓN DE LA PROFUNDIDAD El sistema acústico mono haz es en gran medida la técnica más usada para la medida de la profundidad en proyectos de navegación de ríos y de puertos. El sistema acústico fue utilizado primero en los años 30 pero no obtuvo confianza para la medida de la profundidad hasta los años 50 o los años 60. Una variedad de sistemas acústicos son utilizados, dependiendo de las condiciones del proyecto y de las profundidades. Éstos incluyen sistemas de transductor monohaz, sistemas de barrido múltiples del canal con el transductor, y sistemas del barrido multihaz. Aunque los sistemas multihaz se están utilizando cada vez más para las investigaciones de los proyectos en el bosquejo de la profundidad, los sistemas monohaz todavía son utilizados por la mayoría de usuarios. Muchos de estos principios son también aplicables a los sistemas múltiples de barrido y a los sistemas multihaz. FIGURA 2.4 Medida de la profundidad acústica Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley a) Principio Básico. Los sistemas acústicos de medida de profundidad miden el tiempo transcurrido que un pulso acústico lleva el recorrido de un transductor al fondo del canal y regresa. Esto se ilustra en la Figura 2.4 donde está la profundidad medida (D) entre el transductor y un cierto punto en el fondo acústico reflexivo. El tiempo del recorrido del pulso acústico depende de la velocidad de la propagación (v) en la columna del agua. Si la velocidad de propagación del sonido en la columna del agua se sabe, junto con la distancia entre el transductor y la superficie del agua de la referencia, la profundidad corregida (d) se puede calcular por el tiempo medido del recorrido del pulso. Esto es expresada por la fórmula general siguiente: Profundidad corregida a la superficie referida del agua: d = ½ (v · t) + k + dr…………………… (1) Donde: d = Profundidad corregida de la superficie del agua. v = Velocidad media del sonido en la columna del agua. t = Tiempo transcurrido medido de transductor al fondo y de regreso a transductor. k = Constante del transductor dr = Distancia de la superficie del agua al transductor Los parámetros v, t, y dr no se pueden determinar perfectamente durante el proceso, y k se debe determinar de la calibración periódica del equipo. El tiempo transcurrido, t, es dependiente en la reflectividad del fondo y los métodos relacionados de procesamiento de la señal usados para discernir un regreso válido. La forma, o la agudeza, del pulso que vuelve desempeñará un papel importante en las capacidades de la exactitud y de la detección de la medida de la profundidad. b) Velocidad del sonido en agua. Determinar la velocidad del sonido, v, es quizá el factor más crítico al usar sondas acústicas de profundidad. La velocidad del sonido varía con la densidad y las características elásticas del Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley agua. Estas características son, para las profundidades típicas de proyectos de río y de puertos, sobre todo una función de la temperatura del agua y el contenido suspendido o disuelto, es decir, salinidad. Debido a estos efectos, la velocidad (v) puede extenderse a partir del 4.600 a 5.000 pies/seg. Desde que la mayoría de ríos y proyectos portuarios pueden exhibir variaciones grandes en la temperatura y/o la salinidad con la profundidad, la velocidad de la onda acústica no será constante sobre la distancia del transductor del bote al fondo y el regreso. El efecto de esta variación es significativo. Para el trabajo práctico de sondeo del eco monohaz en agua poco profundas, una velocidad promedio de sonido es usualmente asumida (por la calibración). El uso de una velocidad del sonido promedio no puede ser válido en el tema costero de proyectos sujetos a descargas de agua dulce ni será constante sobre el área del proyecto entero examinado. Si las variaciones grandes en la velocidad ocurren sobre la columna del agua, la velocidad media del sonido usada debe ser ésa o cerca de la profundidad promedio del estudio del proyecto, no sobre la columna entera del agua. c) El calado del transductor y la constante del transductor. El calado del transductor y la constante del transductor se debe aplicar a la distancia reducida del tiempo para obtener la profundidad corregida de la superficie del agua de la referencia. La constante del transductor contiene impulsos eléctricos y/o retrasos mecánicos inherentes en el sistema medidor, incluyendo variaciones de detección del origen de la señal de regreso. También contiene corrección constante debido al cambio en la velocidad entre el nivel de la superficie superior y ése usados como promedio para la gama de la profundidad del proyecto. Por esta razón, el ajuste o la lectura evidente del "calado" en un expediente digital o del análogo no es necesariamente la real del calado del transductor, como sería el obtenido por Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley la medida física entre la superficie del agua y el transductor. También, el calado de la embarcación no es igual que el calado del transductor porque el calado de la embarcación se puede medir concerniente a las aletas del motor o a otros puntos en el casco. El único método eficaz de determinar las constantes combinadas en la ecuación (1) está por una calibración del muestreo de la barra. d) Otras correcciones a las profundidades observadas. La profundidad en la ecuación (1) se debe corregir posteriormente para las variaciones a corto plazo del calado del canal debido a los cambios del cargamento, asentamiento (squat), asentamiento debido al movimiento de la embarcación balanceo, cabeceo, etc. La superficie del agua se debe entonces reducir al dato vertical local basado en tiempo real de río / lago, piscina, u observaciones de marea. Las varias correcciones requeridas en una medida acústica de la profundidad se generalizan en el bosquejo demostrado en la Figura 2.5. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley FIGURA 2.5 Correcciones observadas por el sondaje acústico e) Exactitud de la ecosonda. El tiempo de viaje del pulso de sonido es medido ya sea electrónicamente en un dispositivo que digitaliza profundidad o mecánicamente (gráficamente) en un instrumento analógico de grabación. La exactitud de la medida absoluta del tiempo varía generalmente con la profundidad. Esto es debido a la atenuación de la señal, al ruido, y a la capacidad del trazado de circuito de la medida de correlacionar los pulsos salientes y entrantes. Además, las características acústicas de la reflectividad, es decir, tamaño, forma, orientación, material, etc., puede afectar perceptiblemente el pulso que vuelve. Las variaciones en la fuerza y la agudeza de vuelta de la señal afectarán la exactitud de la medida de la profundidad. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley La irregularidad del pulso reflejado causa incertidumbre en el proceso total de la medida del tiempo. No hay proceso práctico de la calibración para reducir al mínimo este error. La exactitud nominal de la ecosonda para la medida del tiempo es clasificada generalmente por los fabricantes en +-0.1 ft y 0.1 a 0.5 por ciento de la profundidad. Esto se compara a un radio de acción de la precisión de +-0,15 a +-0,35 pies en 50 pies y es independiente de las características acústicas de la reflexión. Los tiempos transcurridos digitalmente medidos son más precisos que esos en los que actúan dispositivos mecánicos de grabación. 2.3.4.1 FRECUENCIA DEL TRANSDUCTOR Un transductor convierte energía electrónica en pulsos acústicos y viceversa. El tipo de transductor usado es un factor importante en la determinación de una medida de profundidad. La frecuencia óptima del transductor es altamente dependiente del lugar del proyecto. A través de proyectos de ríos y puertos, se ha utilizado una variedad de frecuencias. Estas frecuencias se extienden generalmente entre 20 kHz y 1000 kHz. Cada frecuencia del transductor tiene características físicas que satisfacen particularmente a un sitio individual del proyecto. La respuesta del transductor depende de la frecuencia, las condiciones de proyecto, el incremento de la colección, y el patrón del haz como se muestra en la Figura 2.6. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley FIGURA 2.6 Ancho del haz del transductor Las sensibilidades se miden en puntos de potencia promedio de 3DB. En general, los transductores de frecuencia más alta (100 kHz a 1000 kHz) proporcionarán una medida más exacta de la profundidad, debido a ambas características de la frecuencia y anchuras mas concentradas del haz (es decir, estrecho). Los transductores de haz estrechos (es decir menos de 8 grados) pueden requerir la corrección por rolido y balanceo puesto que el haz más enfocado tomará la medida de una distancia inclinada en puntos poco verticales. Sin embargo, los lóbulos laterales mostrados en la Figura 2.6 podrían proveer un retorno vertical en agua poco profunda. Los transductores de haz estrechos deberían ser obtenidos con lóbulos laterales mínimos. Los transductores de una frecuencia más baja (debajo de 40 kHz) se usan para tener anchuras más grandes del haz, que pueden causar la distorsión y alisar las Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley características en fondos irregulares o en cuestas laterales. Sin embargo, las frecuencias inferiores están menos sujetas a la atenuación, lo cual permite mayor medida de profundidad y penetración de sedimentos suspendidos. Aunque una mayor medida de la profundidad no se requiere para proyectos de ríos y puertos, la habilidad para penetrar en sedimento suspendido es un bien acordado, especialmente en la ejecución de las pruebas para los proyectos del dragado. Una desventaja importante de los transductores de una frecuencia más alta es que hay alta atenuación de la señal con la profundidad, y la densidad específica baja de los sedimentos suspendidos (la pelusa) o la vegetación fácilmente reflejarán la señal. Los transductores de alta frecuencia no se recomiendan en las áreas donde ocurren excesos de sedimentos suspendidas comúnmente, o donde la vegetación de fondo puede confundir los resultados deseados. En tales áreas, las frecuencias que se extienden entre 20 kHz y 50 kHz se emplean típicamente para la determinación del objetivo. La frecuencia más comúnmente empleada del transductor en proyectos de navegación de ríos y de puertos es de 200 - 208 kHz. Los transductores que funcionan entre en esta frecuencia se emiten generalmente (entre 1,5 grados y 8 grados en los puntos de -3 DB) para proporcionar detalles del fondo más exacto. Haces más estrechos se recomiendan para los proyectos relativamente difíciles, por ejemplo cortes de rocas o fondos de arena. Un transductor de 3 grados proveerá un esbozo ligeramente más alto de características pequeñas de fondo. La frecuencia de 200-208 kHz (+- 10%) no es un estándar obligatorio de la frecuencia, ni es cualquier anchura particular del haz. Los transductores de una frecuencia más baja o Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley más alta, extendiéndose entre 20 kHz y 1000 kHz, y con anchuras de haz que varían, son permisibles para cualquier clase de prueba o tipo de sistema de medida. Las condiciones locales y los requisitos únicos del proyecto dictarán el tipo óptimo del sistema del examen y frecuencia que se utilizará. Sin embargo, para la navegación y los sondeos del abono de la draga, el sistema acústico de sondeo y / o la frecuencia del transductor debería ser constante a todo lo largo de la duración de proyecto y claramente identificado en especificaciones de la construcción. Los sistemas múltiples de doble frecuencia pueden servir para analizar estratos de sedimento de variar densidades - típicamente usando frecuencias de 200 kHz y 28 kHz. 2.3.4.2 EQUIPO DE SONDEO MONO HAZ Antes de los años 70, la mayoría emplearon los registradores análogos mecánicos de profundidad. Los modelos más comunes usados eran Bludworth y Raytheon 719. Estos dispositivos marcaron el perfil continuo de la profundidad en un papel impreso usando un mecanismo rotativo de la aguja. La velocidad de la aguja mecánica que rotaba era una función de la profundidad del agua y de la velocidad del sonido. Desdichadamente, la velocidad rotatoria de los registradores mecánicos requerían a menudo calibración y alineación constantes. En los años 70, comenzaron a adquirir sistemas digitales de grabación de la profundidad. Estos sistemas marcaron profundidades análogas (perfil) directamente en el papel de grabación termal en blanco; eliminando así la mayoría de los errores en registradores mecánicos. Todos los sistemas modernos de la medida de la profundidad se pueden configurar para hacer salir profundidades medidas a los dispositivos de grabación de Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley datos, donde pueden ser tiempo marcado con etiqueta con la posición e indicar la detección de datos. La Figura 2.7 se presenta algunas de las unidades digitales más comunes de ecosondas usadas actualmente. Las pruebas mono haz son corridas ya sea normales (por ejemplo de sección cruzado) o longitudinal con la alineación del canal. FIGURA 2.7 Típicas ecosondas monohaz y multihaz 2.3.4.3 CALIBRACIÓN DE LA ECOSONDA La calibración de la medición de profundidad de la ecosonda, se realizará mediante la contratación con el patrón de profundidad (plancha o barra), al inicio y término de la actividad diaria de sondaje o cuando haya una suspensión del trabajo por un tiempo Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley mayor de 2 horas seguidas; cambio de transductor o cambio de embarcación. Estas calibraciones se realizarán con un estado de mar calma, en lugares no afectados por corrientes y con la embarcación detenida, de manera de obtener un registro claro. La prueba de la plancha se efectuará cada 2 metros a partir de la superficie del agua, y hasta la profundidad máxima del área de sondaje, considerando para esto que el rango de la prueba de barra cubra la máxima profundidad del área en estudio, sin exceder de los 20 metros, midiendo y registrando las profundidades a la bajada y subida de la plancha (ver Figura 2.8) En las áreas donde no existan batimetrías anteriores se deberá buscar el máximo veril efectuando una batimetría explorativa, para así realizar una prueba de barra que cubra la máxima profundidad sin exceder los 20 metros. Toda prueba de calibración debe quedar dentro del registro de ecograma correspondiente al día, no debiendo ser unida al inicio o al término de la jornada de trabajo, es decir, en ningún caso una prueba de barra se debe pegar. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley + FIGURA 2.8 Metodología para realizar prueba de barra En caso que el rollo de papel de la ecosonda no permita cubrir la jornada total del sondaje, se deberá efectuar el corte de éste dentro de la ejecución de un sondaje, (para cambiar por un nuevo rollo de ecograma), es decir, entre corridas del mismo día e indicando la hora donde se cortó y en ningún caso realizarlo al final del sondaje para posteriormente pegar una prueba de plancha aislada. La plancha o barra deberá tener un peso mínimo de 5 kilogramos y con una superficie no inferior a 600 cm2 , sustentada por un cable de acero marcado cada 2 metros (+/– 10 cm.) y que tenga claramente indicado el punto donde se debe verificar la medida con huincha, a partir de la superficie de la plancha (ver Figura 2.9). Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley FIGURA 2.9 Esquema de la plancha y sus dimensiones La profundidad del transductor deberá ser medida y anotada al centímetro, en la prueba inicial y final. Se recomienda que dicha profundidad no sea inferior a 50 centímetros para asegurar el buen registro de los ecos. Cualquier cambio de ecosonda, transductor o embarcación, obligará a la repetición de la comprobación detallada. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley La prueba de plancha deberá presentar un valor medio que no difiera en +/– 15 centímetros, con respecto a las lecturas parciales. El requisito de efectuar la prueba de barra hasta los 20 metros de profundidad es ineludible, cuando el trabajo cuente con profundidades superiores a los 20 metros o cuando no se haya efectuado una batimetría exploratoria. FIGURA 2.10 Ejemplo de la barra de calibración proyectado en el ecograma 2.3.5 PLANIFICACIÓN DE LÍNEAS HIDROGRÁFICAS Las líneas hidrográficas planificadas sirven para definir a donde se desea que vaya el barco. Las líneas tridimensionales contienen información de la Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley profundidad, la cual se usa para construir la plantilla de sección transversal del canal para cada línea hidrográfica. 2.3.5.1 ESPACIAMIENTO ENTRE LÍNEAS PLANIFICADAS El espaciamiento entre líneas para los levantamientos con transductor simple es de alguna manera arbitrario, porque la cobertura de todo el fondo casi nunca es práctica. En levantamientos de barrido, donde la cobertura de todo el fondo es practica, para asegurar la cobertura plena se suele elegir el espaciamiento entre líneas. Si su embarcación esta equipado con un sistema multihaz, donde la cobertura de un barrido simple depende de la profundidad del agua, el espaciamiento entre líneas cambiará a menudo de un levantamiento al siguiente. Un poco de simple trigonometría da la relación entre la cobertura y la profundidad del agua. Es tentador orientar el transductor de barrido según una geometría algo desplazada hacia un lado, ya que así se incrementa la cobertura por barrido. Cuidado con esto porque la contrapartida es un descenso en la calidad de los datos de los haces exteriores. 2.3.5.2 PATRON DE DESPLAZAMIENTOS PARA LÍNEAS PLANIFICADAS Las líneas planificadas pueden ser creadas en cualquiera de varios patrones. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley Los desplazamientos Paralelas crean líneas paralelas a ambos lados de la línea inicial. Los desplazamientos Radiales hacen pivotar la línea planificada alrededor del punto introducido. Los desplazamientos con patrón de Búsqueda hacen pivotar la Línea planificada alrededor del punto central del primer segmento. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley Los desplazamientos en Escalones añaden valores X,Y introducidos por el usuario, a cada punto de ruta, creando un efecto de escalera. Los desplazamientos de línea Central crean líneas perpendiculares a intervalos definidos por el usuario, a lo largo de la línea inicial. Líneas inteligentes planificadas Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley 2.3.6 FUENTES DE ERROR Y ESTIMACIÓN Si bien el texto siguiente trata sobre los errores de datos adquiridos por sistemas multihaz, debe notarse que, en principio, es aplicable a los datos adquiridos con cualquier sistema de sondeo acústico. Con sistemas de sondeos multihaz o multitransductor, la distancia entre las sondas sobre el fondo y la antena del sistema de posicionamiento puede ser muy grande, especialmente en aguas profundas con un sistema de franja ancha. Por esto, la exactitud del posicionamiento del sondeo depende también de la exactitud del girocompás, la inclinación del haz (o posición del transductor para sistemas de franja) y la profundidad del agua (sólo en los sistemas de barrido). Los errores de balance y cabezada también contribuyen al error relativo del sondeo obtenido desde el transductor. En conjunto, puede ser muy difícil generalizar lo que se puede alcanzar como exactitud típica de posición para cada sonda como función de la profundidad, en alguno de estos sistemas modernos. Los errores están en función no sólo del sondador sino también de la embarcación y de la exactitud y posición de los sensores auxiliares. El uso de haces no verticales introduce errores adicionales causados por el incorrecto conocimiento de la orientación del buque en el momento de la transmisión y recepción de los ecos sonar. Los errores inherentes al desarrollo de la posición de un haz individual deben incluir los siguientes: a) Error del sistema de posicionamiento, b) Error de medición de profundidad, c) Incertidumbre asociada con el modelo de la trayectoria del rayo (incluyendo el perfil de velocidad del sonido), d) Exactitud en el rumbo del buque, e) Identificación exacta de los errores puntuales del sistema resultantes Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley de falta de alineación del transductor, f) Sensores del movimiento del buque (balanceo y cabeceo), y g) Tiempo de latencia. 2.3.6.1 VELOCIDAD DEL SONIDO Y REFRACCION DE RAYOS Las ecosondas monohaz, múltiples canales, y multihaz dependen de ondas de sonido para medir profundidad. Son cronómetros hidrográficos que miden con precisión el tiempo que tardan en volver las ondas de sonido desde el fondo. Basándose en parámetros de velocidad del sonido convierten ese tiempo en profundidades. Esta profundidad debe ser corregida para tener en cuenta los efectos de los cambios de velocidad del sonido, marea, el movimiento del barco y la latencia de los dispositivos. En un sistema acústica monohaz, un sondeo comienza cuando la electrónica de la ecosonda envía un corto pulso de voltaje al transductor, que convierte la energía eléctrica en energía mecánica en la forma de una onda acústica (sonido) en el agua un ping. El transductor enfoca el ping hacia abajo y casi toda la energía del ping viaja dentro de un haz, como se muestra en la figura inferior. Sondeo Monohaz A través del Cambio de velocidad del sonido. No ocurre ningún cambio en la dirección del haz. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley El ping viaja a la velocidad del sonido en el agua. Donde la velocidad del sonido cambia debido a las variaciones de temperatura y densidad, como una frontera entre velocidades 1 y 2, la velocidad del ping cambia. una porción muy pequeña de la energía se refleja hacia arriba, pero el ping todavía viaja hacia abajo, no hay ningún cambio de dirección. Cuando el ping alcanza el fondo encuentra un gran cambio de velocidad. Esto es porque el sonido viaja mucho más deprisa en el fondo sólido que en el agua. Una gran cantidad de la energía del ping rebota de vuelta n esta transición y eventualmente encuentra el camino de vuelta al transductor. El transductor convierte el sonido reflejado de vuelta en energía eléctrica. A partir del tiempo de retraso entre la salida y la vuelta del pulso (y la velocidad acústica en el agua conocida) se calcula la profundidad. 2.3.6.2 GEOMETRIA DEL HAZ El equipo requiere para un levantamiento monohaz un sistema de posicionamiento, una ecosonda y si el mar está revuelto un compensador de oleaje. Montar la antena de posición encima del transductor y la x e y de la antena son las mismas que las del transductor. Profundidad (z) es el sondeo menos el oleaje. Para un levantamiento multihaz preciso hace falta algo de equipo adicional: un giroscopio para medir el rumbo del barco y una MRU (unidad de referencia de movimiento)para los datos del cabeceo y del balanceo, la razón de las mediciones adicionales es, de nuevo, por que los haces dirigidos no son verticales así que los cálculos de x,y, y z de los sondeos se vuelven más complejos. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley Una vez más nos referiremos a algunas figuras, cada una mostrando un monohaz, para explicar algunos conceptos básicos, la siguiente figura muestra un haz saliendo del multihaz en un ángulo de 45º. El barco de levantamiento está balanceándose r grados así que el ángulo que necesitamos conocer es r + 45º, que sólo se conoce a partir de la medición del MRU. Mirando a estribor el ángulo de haz relativo a la vertical es el ángulo de balanceo del barco (R)+Ángulo de Salida del Haz La siguiente figura muestra la necesidad de medir el cabeceo. Aunque el haz sale verticalmente el barco cabecea y el ángulo requerido es p. Ángulo de Haz relativo a la Vertical es el ángulo de cabeceo del barco (P) La medición angular final es el rumbo del giroscopio (guiñada) ángulo (h) como se muestra debajo. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley Ángulo de Haz relativo al Norte de Retícula Hay otros ángulos a considerar que tienen que ver con el alineamiento relativo del giroscopio, MRU y el multihaz en sí. en un mundo perfecto los tres instrumentos estarían montados verticalmente alineados perfectamente con la quilla del barco. Bienvenidos al mundo real, donde nada es exacto y tenemos variaciones magnéticas y ángulos de desplazamientos de montaje que acomodar. Estos ángulos de desplazamiento deben de sumarse a los ángulos de cabeceo, balanceo y rumbo. Es casi imposible medir con suficiente precisión estos ángulos y esa es la razón de ser de la Prueba de Parcheo, dejar que el ordenador averigüe los ángulos. Corregir profundidades observadas para los efectos superpuestos de embarcación como son Cabeceo , balanceo , y Guiñada fueron una vez quizá el aspecto más difícil de levantamiento de planos hidrográfico. Junto con los periodos de marea, estos efectos son un componente principal de error en el levantamiento de planos hidrográfico. El cabeceo de la embarcación es el componente principal de error de los cuatro movimientos listados. Desde mediados de los 90, instrumentos precisos de compensación de Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley movimiento significativamente han reducido estos errores. Muchos han incorporado compensación de movimiento en los sistemas monohaz. Desde que las condiciones en la embarcación como Cabeceo , balanceo , y Guiñada pueden ocurrir simultáneamente y en períodos diferentes , ya sea la interpretación visual o automatización de un registro monohaz analógico del perfil para reducir estos errores es un proceso impreciso , en el mejor de los casos. La compensación de movimiento es obligatoria en trazado de planos de dragado y rigurosamente recomendado para todos los demás sondeos dónde condiciones del mar adversas puede afectar la calidad de los datos registrados (Cabeceo , balanceo). Los efectos de Balanceo(rolido)-Cabeceo.- En embarcaciones mayores ,por ejemplo mayores a 26 pies - el balanceo y el cabeceo no son usualmente excesivos bajo condiciones normales de funcionamiento - típicamente para menos de 5 grados. Sin embargo, en embarcaciones más pequeñas (Menos de 26 pies) el balanceo o el cabeceo fácilmente puede acercarse o puede exceder los10 grados en mares agitados. La corrección para balanceo y cabeceo discrepan con el ángulo de rotación y la profundidad (vea la Figura 2.11). Sin embargo , el ancho del haz del transductor puede ser mayor que cabeceo o el balanceo global, dando como resultado el primer retorno estacionario encontrándose cerca de vertical. La Figura 2.12 muestra un balanceo en el estribor (mirando desde popa). La rotación es alrededor del punto "O". El transductor es rotado ligeramente más alto del nivel relativo a la superficie de referencia. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley FIGURA 2.11 Efectos del balanceo/cabeceo en un sistema monohaz Corrección de desplazamiento de la posición de Balanceo – Cabeceo.- Sistemas de procesamiento monohaz (ejem., HYPACK) corrigen variaciones de profundidad y de posición debido al balanceo o cabeceo. Usando datos de cabeceo-cabeceo, HYPACK permite corrección de la posición X-Y de la profundidad debido a la rotación del eje del transductor-antena, y opcionalmente calcula la coordenada X-Y del centro del haz proyectado en el fondo (ver D1 en la Figura 2.12). En un sondeo amplio la embarcación con antena halló 30 pies por encima del transductor supeditado a un balanceo 10 grados o el cabeceo, ésta equivaldría a 5 pies de desplazamiento horizontal del transductor. En un proyecto de 30 Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley pies, el centro del haz en el fondo también sería desplazado por otro de 5 pies (aproximadamente) relativo al transductor. El desplazamiento horizontal total de la profundidad relativo a la antena luego seria de 10 pies. Un desplazamiento de esta magnitud (3 m) está fuera de los 2 m RMS de tolerancia posicional para sondeos de dragado y de navegación , así es que debería ser aplicada a todas las profundidades observadas. Una embarcación más pequeña de sondeo normalmente tendría una altura de la antena (< 10 pies) mucho más pequeña así el desplazamiento horizontal entre la antena y profundidad del fondo seria pequeña. Corrección Vertical de la Profundidad debido a la Inclinación Balanceo-cabeceo.- Además de la profundidad de fondo transductor - antena, corrección posicional de desplazamiento , la inclinación para la corrección vertical para la profundidad también puede ser calculada y aplicada para la profundidad observada. La corrección para la inclinación vertical de la profundidad es usualmente pequeña para las condiciones típicas de cabeceo y balanceo. Como se indica en la Figura 2.11 generalmente es insignificante (< 0.2 pies) para profundidades de proyectos menores de 20-25 pies. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley FIGURA 2.12 Corrección de profundidad debido al balanceo 2.3.6.3 PRUEBA DE LATENCIA La Prueba de Latencia se usa para determinar el tiempo de retraso de convergencia entre el GPS y la ecosonda monohaz. También se puede determinar automáticamente los retrasos temporales ejecutando líneas hidrográficas recíprocas encima de un fondo cambiante (Ej. ejecutar la misma línea hidrográfica arriba y abajo en un talud o por encima de una figura prominente del fondo).En la Figura 2.13 se muestra los perfiles de las dos líneas hidrográficas, cuando no estén alineadas es que hay un error de latencia. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley Cuando los sondeos son redibujados el patrón a bandas ha desaparecido, dejando un valor para ser usado como ajuste de latencia como se muestra en la Figura 2.14 FIGURA 2.13 Resultados de ajuste prueba de latencia FIGURA 2.14 Valor de latencia Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley FIGURA 2.15Correccion de la posición por latencia FIGURA 2.16 Efectos debido al error de latencia Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley 2.3.6.4 PRUEBA DE CALIBRACIÓN POR SQUAT Y SETTLEMENT Mientras que generalmente la se velocidad asienta el de casco una por embarcación el aumenta, movimiento del mismo(Settlement), o se eleva la proa dependiendo de la velocidad (squat), respecto al nivel de referencia del agua, causando un error en la medida de la profundidad que debe ser corregido (Figura 2.17). Una prueba de squat se debe realizar por lo menos anualmente para determinar la relación entre la velocidad de la embarcación y la altura del transductor sobre o debajo del plano de referencia del sondaje estático. Sin la corrección por squat, los canales pueden ser dragados más profundo de lo que realmente los planos indican. Los sistemas de RTK DGPS que proporcionan la elevación directa (absoluta) de la antena-transductor eliminan la necesidad de la corrección por squat, pues la altura de la antena registrará el squat en tiempo real. Sin embargo, si el sistema de RTK DGPS se fija para proporcionar solamente la altura de la antena y no se configura para determinar la elevación del transductor, entonces la corrección por squat debe todavía ser aplicada. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley FIGURA 2.17 Efectos en el calado de la embarcación debido al squat 2.4 ESPECIFICACIONES TÉCNICAS USADAS PARA EL LEVANTAMIENTO HIDROGRÁFICO EN EL RÍO UCAYALI Por lo mencionado anteriormente y de acuerdo a los requerimientos solicitados el Levantamiento Hidrográfico del río Ucayali se realizó de acuerdo a las siguientes especificaciones: Líneas de Navegación Las líneas de sondaje se planificaron perpendicularmente a la ribera del río separadas cada 500 metros a lo largo de todo el cauce del río, y cada 100 metros en los malos pasos. Registros de Ecosonda Calibración de Ecosonda Reducción de sondajes Continuo en metros. Al inicio y fin de cada día de sondaje. Los sondajes fueron reducidos por variación del nivel del río, por inmersión de transducer, por Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM Levantamiento Hidrográfico Automatizado, para la Determinación de la Ruta Optima de Navegación en el Río Ucayali . Godoy Oriundo, Edy Derechos reservados conforme a Ley pendiente hidráulica y por la máxima vaciante registrada en la zona. 2.5 CARTOGRAFÍA Escala .- Las escalas que se utilizaron para la presentación de los planos son: § 1/1’750,000 Carta índice : río Ucayali (Formato A3) § 1/1’750,000 Esquema de la profundidad del canal de navegación (Formato A3) § 1/1’750,000 Método para determinar profundidad del río (Formato A3) § 1/25,000 Para los planos de Navegabilidad del río Ucayali (Formato A3) § 1/10,000 Para planos de los detalles de los malos pasos (Formato A3) Datum de Referencia.- El Datum de referencia utilizado es el mismo Sistema utilizado por los GPS que es WGS-84. Proyección Cartográfica.- Toda la cartografía se ha efectuado usando la Proyección Cartográfica Universal Transversal de Mercator (UTM) y Geográfica representada en grados, minutos, segundos. Elaboración y diseño en formato PDF por la Oficina General del Sistema de Bibliotecas y Biblioteca Central de la UNMSM