matematica del control fuzzy - FCEIA
Anuncio

DEPARTAMENTO DE CONTROL
ESCUELA DE ELECTRONICA
FACULTAD DE CIENCIAS EXACTAS, INGENIERIA Y AGRIMENSURA
UNIVERSIDAD NACIONAL DE ROSARIO
CONTROL AVANZADO II
MATEMATICA DEL
CONTROL FUZZY
Octubre 2010
Matemática del Control Fuzzy
INDICE
1
2
3
4
5
Conjuntos clásicos ______________________________________________________________________ 3
1.1
Definiciones y características principales de un conjunto clásico ____________________________ 3
1.2
Operaciones entre conjuntos y sus propiedades __________________________________________ 3
1.3
Función característica_______________________________________________________________ 4
Conjuntos fuzzy ________________________________________________________________________ 5
2.1
Función de pertenencia______________________________________________________________ 5
2.2
Funciones de pertenencia más utilizadas _______________________________________________ 6
2.3
Operaciones entre conjuntos fuzzy ____________________________________________________ 8
Relaciones y Reglas ____________________________________________________________________ 10
3.1
Producto cartesiano _______________________________________________________________ 10
3.2
Relaciones clásicas y función característica ____________________________________________ 10
3.3
Relaciones fuzzy __________________________________________________________________ 10
3.4
Implicaciones y reglas ______________________________________________________________ 11
Razonamiento Aproximado ______________________________________________________________ 14
4.1
Regla Composicional de Inferencia ___________________________________________________ 14
4.2
Modus Ponens ____________________________________________________________________ 16
4.3
Razonamiento fuzzy _______________________________________________________________ 17
Bibliografía___________________________________________________________________________ 20
Control Avanzado II
Página 2 de 20
Matemática del Control Fuzzy
1
Conjuntos clásicos
1.1
Definiciones y características principales de un conjunto clásico
Se define como conjunto a un grupo de elementos de cualquier clase. En la teoría clásica los
conceptos de “conjunto” y “elemento” son primitivos, es decir, no se encuentran definidos en
términos de otros conceptos.
Un conjunto clásico queda completamente especificado por los elementos que el mismo
contiene. Además, para cualquier elemento perteneciente al campo de referencia – también
denominado universo de discurso – puede determinarse sin ambigüedades si el mismo
pertenece o no pertenece a un determinado conjunto.
Un conjunto puede ser finito, contable o incontable. Puede describirse con el listado
completo de sus elementos o enunciando la propiedad que define la pertenencia de los
elementos al conjunto. Los siguientes ejemplos ilustran algunos de estos casos:
A = { 0, 1, 2, 3, 4}
conjunto finito
B = { x ∈ Z / x < 0} conjunto contable descrito por una propiedad
Entre todos los conjuntos se distinguen un par de conjuntos especiales:
- el llamado universo, nombrado con U, que contiene todos los elementos del universo de
discurso,
- y el llamado conjunto vacío, indicado con el símbolo ∅, que no contiene ningún elemento.
1.2
Operaciones entre conjuntos y sus propiedades
A partir de un par de conjuntos clásicos A y B del universo U pueden definirse las
siguientes operaciones:
- Complemento de A, A’ = { x / x ∉ A}
- Intersección de A y B, A I B = { x / x ∈ A ∧ x ∈ B}
- Unión de A y B, A U B = { x / x ∈ A ∨ x ∈ B}
- Producto Cartesiano de A y B, A x B = { ( x, y) / x ∈ A ∧ y ∈ B}
Estas operaciones cumplen con las siguientes propiedades:
Conmutativa
AU B = B U A
Asociativa
AI B = B I A
Distributiva
( A U B) U C = A U ( B U C )
( A I B) I C = A I ( B I C )
A I ( B U C ) = ( A I B) U ( A I C )
A U ( B I C ) = ( A U B) I ( A U C )
Control Avanzado II
Página 3 de 20
Matemática del Control Fuzzy
A UU = U
Absorción
Contradicción
1.3
Identidad
AU∅ = A
AI∅ = ∅
A IU = A
A I A′ = ∅
Tercio excluido A U A′ = U
Función característica
Para definir un conjunto es posible enumerar sus elementos o enunciar un predicado que
defina aquella propiedad que es cumplida por todos sus elementos. Existe una tercera
posibilidad para enunciar la definición de un conjunto A: usar su función característica µA.
Sea A un conjunto definido en el dominio X, se define la función
µA(x): X → {0, 1}
como función característica del conjunto A si para todo x perteneciente al dominio X se cumple
que
1
0
µA(x) =
si x ∈ A,
si x ∉ A.
(1.1)
Con esta función característica es posible redefinir las operaciones “complemento”,
“intersección” y “unión” en término de funciones, lo que será de mucha utilidad al tratar la
teoría de conjuntos fuzzy. Sean A y B dos conjuntos definidos en el dominio X, y sean µA y µB
sus respectivas funciones características. Las operaciones referidas anteriormente pueden
definirse como:
- Complemento de A, indicado con A’, µA’(x) = 1− µA(x)
(1.2)
- Intersección de A y B, indicado con A I B , µA∩B(x) = min(µA(x), µB(x))
(1.3)
- Unión de A y B, indicado con A U B , µA∪B(x) = max(µA(x), µB(x))
(1.4)
La elección de estas funciones es completamente arbitraria. La única propiedad que la
operación intersección debe satisfacer es la de retornar el valor 1 si ambos argumentos valen 1,
y retornar el valor 0 para el resto de los casos. El uso de la función mínimo cumple con esta
premisa, pero existen definiciones alternativas para la operación intersección, como por
ejemplo:
µA∩B(x) = µA(x).µB(x)
(1.5)
µA∩B(x) = max(0, µA(x) + µB(x) – 1)
(1.6)
Para el caso de la operación unión también es posible definir una función alternativa para
representarla, se la denomina OR-probabilístico:
µA∪B (x) = µA(x) + µB(x) – µA(x).µB(x)
(1.7)
Las funciones que normalmente se utilizan para definir la operación intersección, como (1.3)
y (1.5), son normas triangulares. Las funciones que normalmente se utilizan para definir la
operación unión, como (1.4) y (1.7), son co-normas triangulares.
Control Avanzado II
Página 4 de 20
Matemática del Control Fuzzy
2
Conjuntos fuzzy
2.1
Función de pertenencia
De acuerdo a lo enunciado en el apartado 1.1, dado un conjunto A definido en el universo X
se sabe sin ambigüedades si un elemento x de X pertenece o no pertenece al conjunto A. En la
teoría de conjuntos fuzzy esta propiedad de pertenencia se generaliza, por lo que dado un
conjunto fuzzy D no es necesario que un elemento x del universo X pertenezca o no pertenezca
al mismo, sino que es posible enunciar que el elemento x pertenece “con un determinado
grado” al conjunto fuzzy D.
La generalización se lleva a cabo en la definición de la llamada función de pertenencia de un
conjunto fuzzy, que se basa en la definición de la función característica de un conjunto clásico.
Esta función asigna a cada elemento x ∈ X un valor en el intervalo unitario continuo [0, 1] en
lugar del conjunto de dos elementos {0, 1}. Un conjunto definido sobre esta base se denomina
conjunto fuzzy.
La función de pertenencia µA de un conjunto fuzzy A definido en el dominio X es una
función
µA(x): X → [0, 1]
(2.1)
De este modo, cada elemento x de X tiene un grado de pertenencia µA(x) ∈ [0, 1]. El
conjunto fuzzy A queda completamente determinado por el conjunto de t-uplas
A = {(x, µA(x)) / x ∈ X}
(2.2)
La notación anterior suele cambiarse por la siguiente para universos discretos:
A=
∑
µA(x) / x
(2.3)
x∈X
y por la siguiente para universos continuos:
A=
∫
X
µA(x) / x
(2.4)
donde los símbolos de sumatoria o integral indican enumeración, y la barra inclinada indica
t-upla.
Se concluye entonces que un conjunto fuzzy en un universo X queda completamente
definido a través de su función de pertenencia en dicho dominio.
Ejemplos:
1) Universo discreto
X=N
A : números aproximadamente iguales a 6
A = {0.1/3, 0.3/4, 0.6/5, 1.0/6, 0.6/7, 0.3/8, 0.1/9}
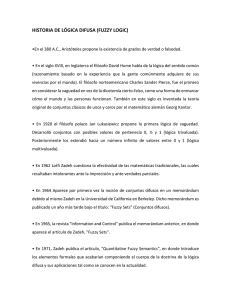
2) Universo continuo
X=R
Control Avanzado II
A : números aproximadamente iguales a 6
Página 5 de 20
Matemática del Control Fuzzy
∫
R
µA(x) / x
x−6
1 −
3
µA(x) =
0
1
1-sqrt(abs(x-6)3)
0.8
si 3 ≤ x ≤ 9
0.6
si x < 3 ó x > 9
µ
A=
Función de pertenencia uA(x)
0.4
0.2
0
0
2.2
2
4
6
x
8
10
12
Funciones de pertenencia más utilizadas
Si bien la elección de una función de pertenencia es arbitraria, en el momento de la
implementación tecnológica hay funciones más comúnmente usadas debido a su sencillez. A
continuación se detallan algunas de estas funciones:
- Funciones Triangulares
Función de Pertenencia Triangular
µA(x) =triángulo(x; a, b, c)
1
Grado de pertenencia
0.8
(c-x)/(c-b)
(x-a)/(b-a)
0.6
0.4
0.2
0
a
-1
-0.8
-0.6
b
-0.4
-0.2
0
x
c
0.2
0.4
0.6
0.8
1
Función de Pertenencia Trapezoidal
- Funciones Trapezoidales
1
µA(x) =trapecio(x; a, b, c, d)
Grado de pertenencia
0.8
(x-a)/(b-a)
(d-x)/(d-c)
0.6
0.4
0.2
0
a
-1
Control Avanzado II
-0.8
-0.6
c
b
-0.4
-0.2
0
x
0.2
d
0.4
0.6
0.8
1
Página 6 de 20
Matemática del Control Fuzzy
Función de Pertenencia Campana de Gauss
- Funciones Campanas de Gauss
µA(x) =gauss(x; σ, c)= e
−
1
( x −c ) 2
2σ
2
Grado de pertenencia
0.8
0.6
0.4
sigma = 0.2
c=0
0.2
0
-1
-0.8
- Funciones Campanas Generalizadas
1
x−c
1+
a
-0.4
-0.2
0
x
0.2
0.4
0.6
0.8
1
Función de Pertenencia Campana Generalizada
1
2b
0.8
Grado de pertenencia
µA(x) =campana(x; a, b, c)=
-0.6
0.6
a = 0.4
b=2
0.4
c=0
0.2
0
-1
-0.8
-0.6
-0.2
0
x
0.2
0.4
0.6
0.8
1
0.8
1
Función de Pertenencia Sigmoide
- Funciones Sigmoides
1
1
1 + e − a ( x −c )
0.8
Grado de pertenencia
µA(x) =sigma(x; a, c)=
-0.4
0.6
0.4
a = 13
c = -0.4
0.2
0
-1
Control Avanzado II
-0.8
-0.6
-0.4
-0.2
0
x
0.2
0.4
0.6
Página 7 de 20
Matemática del Control Fuzzy
µA(x) =dif_sigma(x; a1, c1, a2, c2)=sigma(x; a1, c1) – sigma(x; a2, c2)
Función de Pertenencia Diferencia de Sigmoides
1
Grado de pertenencia
0.8
0.6
0.4
0.2
a1=-0.5
a2=0.6
c1=10
c2=10
0
-1
-0.8
-0.6
-0.4
-0.2
0
x
0.2
0.4
0.6
0.8
1
µA(x) =prod_sigma(x; a1, c1, a2, c2)=sigma(x; a1, c1) . sigma(x; a2, c2)
Función de Pertenencia Producto de Sigmodes
1
Grado de pertenencia
0.8
0.6
0.4
a1=-0.6
c1=10
0.2
a2=0.5
c2=-20
0
-1
2.3
-0.8
-0.6
-0.4
-0.2
0
x
0.2
0.4
0.6
0.8
1
Operaciones entre conjuntos fuzzy
A partir de un par de conjuntos fuzzy A y B del universo X, definidos a partir de su función
de pertenencia µA(x) y µB(x), puede encontrarse la función de pertenencia del conjunto que
surge de realizar operaciones básicas entre los mismos. Dados los conjuntos A y B definidos
como
A = {(x, µA(x)) / x ∈ X}
B = {(x, µB(x)) / x ∈ X}
se definen las siguientes operaciones de manera similar a lo hecho con los conjuntos clásicos
y sus funciones características:
- Complemento de A,
µA’(x) = 1− µA(x)
Control Avanzado II
(2.5)
Página 8 de 20
Matemática del Control Fuzzy
- Intersección de A y B,
µA∩B(x) = min(µA(x), µB(x))
(2.6)
µA∩B(x) = µA(x).µB(x)
(2.7)
En general, se utiliza la notación µA∩B(x) = µA(x) * µB(x) para indicar el uso de la
operación intersección (norma triangular) e independizarse de su definición.
- Unión de A y B,
µA∪B(x) = max(µA(x), µB(x))
(2.8)
µA∪B(x) = µA(x) + µB(x) – µA(x).µB(x)
(2.9)
En general, se utiliza la notación µA∩B(x) = µA(x) ⊕ µB(x) para indicar el uso de la
operación unión (co-norma triangular) e independizarse de su definición.
En el caso de conjuntos clásicos es indistinto el uso de una u otra definición para encontrar
la función característica del conjunto resultado de la intersección o la unión de conjuntos. Esta
condición no se cumple en el caso de trabajar con conjuntos fuzzy y sus funciones de
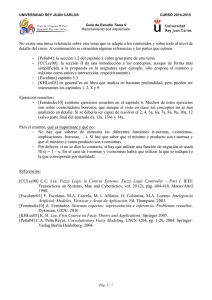
pertenencia. He aquí algunos ejemplos utilizando las definiciones (2.5), (2.6) y (2.8):
1
µA(x)
µB(x)
1
µA’ (x)
x
1
x
1
µA∪B(x)
µA∩B(x)
x
x
µA∩A’ (x)
µA∪A’ (x)
x
x
En los ejemplos anteriores puede observarse que no se cumplen las leyes de contradicción y
del tercio excluido definidas para conjuntos clásicos (ver punto 1.2).
Control Avanzado II
Página 9 de 20
Matemática del Control Fuzzy
3
Relaciones y Reglas
3.1
Producto cartesiano
Dados los universos X e Y, se define como producto cartesiano XxY al conjunto de todos los
pares ordenados (x, y) tales que x pertenezca a X e y pertenezca a Y. Esta definición puede
expresarse de la siguiente manera:
XxY = {( x, y ) / x ∈ X ∧ y ∈ Y }
El producto cartesiano XxY es un nuevo universo, el universo de todos los pares ordenados
(x, y).
3.2
Relaciones clásicas y función característica
Una relación R definida en el producto cartesiano XxY es un subconjunto determinado de
pares (x, y) pertenecientes a XxY. Generalmente los elementos de R cumplen con una
determinada condición que define a la relación.
Ejemplos:
1) Sean los universos X = Y = R
{
Se puede definir la relación R = ( x, y ) / x ∈ X ∧ y ∈ Y ∧ y = x 2
}
La relación está formada por los puntos del plano que pertenecen a la parábola y = x 2 .
Luego es sencillo comprobar que (0,0) ∈ R , (2,4) ∈ R , y (3,5) ∉ R .
2) Sean los universos X = Y = Z = R
Se puede definir la relación R = {( x, y, z ) / x ∈ X ∧ y ∈ Y ∧ z ∈ Z ∧ z = 3x + 2 y + 1}
El producto cartesiano puede generalizarse a n universos, y el mismo estará integrado
por n-uplas. Luego la relación R estará formada por un subconjunto de n-uplas del
producto cartesiano.
Siendo la relación R un conjunto, es posible definir su función característica µR(x, y) de
manera tal que
1
0
µR(x, y) =
si ( x, y ) ∈ R,
si ( x, y ) ∉ R.
(3.1)
De este modo, para la relación definida en el ejemplo 1 vale que µR(0, 0) = 1 y µR(3, 5) = 0.
3.3
Relaciones fuzzy
Dados los universos X e Y, y el producto cartesiano XxY , se define una relación fuzzy R a
través del enunciado de su función de pertenencia µR(x, y)
µR(x, y): XxY → [0, 1]
Control Avanzado II
(3.2)
Página 10 de 20
Matemática del Control Fuzzy
De este modo, cada par (x, y) de XxY tiene un grado de pertenencia µR(x, y) ∈ [0, 1]. De
manera análoga a los conjuntos fuzzy se indica para el caso de dominios discretos:
∑
R=
µR(x, y) / (x, y)
(3.3)
( x , y )∈ XxY
y para el caso de universos continuos:
R=
∫
XxY
µR(x, y) / (x, y)
(3.4)
donde los símbolos de sumatoria o integral indican enumeración, y la barra inclinada indica
t-upla.
Ejemplo con universos continuos:
X = Y = [0, 2]
R : x es mucho más grande que y
µ R ( x, y ) =
uR(x,y)
1
1
1 + e −3( x − y )
0.8
0.6
0.4
0.2
2
0
2
1
1.5
1
y
3.4
0.5
0
x
0
Implicaciones y reglas
El motor de inferencia del controlador fuzzy cuenta con una base de reglas a partir de las
cuales define el valor de salida correspondiente a un determinado valor en las entradas. Cada
una de las reglas que componen la base de reglas es del tipo SI-ENTONCES (IF-THEN), y se
representan como:
SI <antecedente> ENTONCES <consecuente>
(3.5)
En un controlador fuzzy, el antecedente de la regla contiene las condiciones que deben
cumplir las entradas para que se cumpla en la salida lo que se describe en el consecuente. Por
ejemplo, para un controlador donde la entrada sea el error (e) puede escribirse una regla como
la siguiente:
SI < e es PB > ENTONCES < u es PM >
El error e se encuentra definido en el dominio E, y la salida u en el dominio U. La regla
descripta no es más que una relación fuzzy definida en el dominio que resulta del producto
escalar de los dominios de las entradas y la salida, esto es, ExU, y estará representada por su
función de pertenencia µR(e, u)
µR(e, u): ExU → [0, 1]
(3.6)
En la regla anterior PB significa positivo y grande, y PM significa positivo y medio. Cada
uno de estos valores lingüísticos será representado en su respectivo dominio por un conjunto
fuzzy.
Control Avanzado II
Página 11 de 20
Matemática del Control Fuzzy
En general las reglas tendrán la forma:
R: SI < x es A > ENTONCES < y es B >
x ∈ X , A definido a través de µA(x)
donde
y ∈ Y , B definido a través de µB(y)
en la que se enuncia que si la variable x cumple con la premisa descripta en el antecedente,
entonces la variable y cumplirá con lo descripto en el consecuente. Este enunciado se denomina
implicación, y se representa con
A→B
y el objetivo será encontrar la función de pertenencia µR(x, y) de dicha implicación (o regla) en
función de µA(x) y µB(y). En otras palabras
R=
∫
XxY
µR(x, y) / (x, y) =
∫
XxY
f (µA(x), µB(y)) / (x, y)
Hay varias propuestas para determinar µR(x, y), aunque la más utilizada en el desarrollo de
controladores – por sus resultados y facilidad en su aplicación – es la llamada implicación de
Mamdani, que propone
R=
∫
XxY
µR(x, y) / (x, y) =
∫
XxY
µA(x) * µB(y) / (x, y)
(3.7)
y en consecuencia, según la operación que se utilice para representar la norma triangular (*), se
podrán definir
R=
∫
µA(x) . µB(y) / (x, y)
(3.8)
R=
∫
min(µA(x), µB(y)) / (x, y)
(3.9)
XxY
XxY
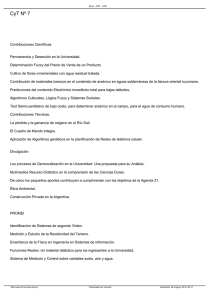
Ejemplo:
Retomando la regla
R: SI < e es PB > ENTONCES < u es PM >
donde
e ∈ E = [-1, 1]
µPB(e): E → [0, 1]
u ∈ U = [-10, 10]
µPM(u): U → [0, 1]
PM
1
0.8
0.8
Grado de pertenencia
Grado de pertenencia
PB
1
0.6
0.4
0.6
0.4
0.2
0.2
0
0
-1
-0.8
Control Avanzado II
-0.6
-0.4
-0.2
0
e
0.2
0.4
0.6
0.8
1
-10
-8
-6
-4
-2
0
u
2
4
6
8
10
Página 12 de 20
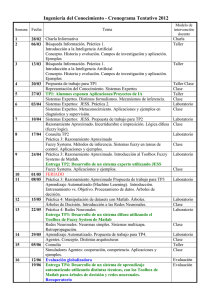
Matemática del Control Fuzzy
A continuación se muestran las funciones de pertenencia de la relación R utilizando la
función mínimo y la función producto:
µR(e, u)= min(µPB(e), µPM(u))
Control Avanzado II
µR(e, u)= µPB(e) . µPM(u)
Página 13 de 20
Matemática del Control Fuzzy
4
Razonamiento Aproximado
4.1
Regla Composicional de Inferencia
Partiendo de una regla R, la llamada Regla Composicional de Inferencia permite calcular el
“resultado” de aplicar dicha regla a una premisa conocida, el objetivo es el de deducir una
conclusión (salida) generada por dicha regla a partir de ciertas condiciones (entrada).
La tarea se resume en encontrar el conjunto fuzzy B definido en el espacio Y partiendo del
conjunto fuzzy A definido en el espacio X y la relación R definida en el espacio XxY:
A ; µA(x)
x∈X
R ; µR(x, y)
(x, y) ∈ XxY
B ; µB(y)
y∈Y
}
}
datos
resultado
Se muestra a continuación el procedimiento a seguir a partir de un ejemplo.
i) El conjunto fuzzy A se encuentra definido por su función de pertenencia µA(x) en el
dominio X:
1
X = [0 10]
0.9
1
µA(x) =campana(x; 1.5, 2, 5)=
x −5
1.5
0.7
0.6
uA(x)
1+
0.8
4
0.5
0.4
0.3
0.2
0.1
0
0
1
2
3
4
5
x
6
7
8
9
10
ii) La relación R representa una regla del tipo SI-ENTONCES como la siguiente:
R: SI < x es A > ENTONCES < y es B >
R: SI x es A ENTONCES y es B
La función de pertenencia de R es µR(x, y)
1
X = [0 10]
0.8
Y = [0 40]
uR(x,y)
0.6
0.4
0.2
0
40
30
10
8
20
6
y
4
10
x
2
0
Control Avanzado II
0
Página 14 de 20
Matemática del Control Fuzzy
iii) Se construye la extensión cilíndrica de A, denominada c(A), expandiendo el dominio de
A de X a XxY:
Extensión cilíndrica de A
µc(A)(x,y) =µA(x)
1
0.8
0.6
0.4
0.2
0
40
30
10
8
20
y
6
4
10
2
0
x
0
iv) Se realiza la intersección de µR(x, y) y µc(A)(x,y):
µc(A)∩R(x,y) = min [µc(A)(x,y) , µR(x, y)] = min [µA(x) , µR(x, y)]
1
0.8
0.6
0.4
0.2
0
40
30
10
8
20
y
6
4
10
x
2
0
0
v) Se realiza la proyección de la intersección anterior sobre el dominio Y para encontrar
µB(y):
µB(y) = max { min [µA(x) , µR(x, y)] }
∀x
1
0.8
0.6
0.4
0.2
0
40
30
10
8
20
y
6
4
10
2
0
Control Avanzado II
x
0
Página 15 de 20
Matemática del Control Fuzzy
El resultado de dicha proyección es la función de pertenencia buscada, µB(y):
1
0.9
0.8
0.7
uB(y)
0.6
0.5
0.4
0.3
0.2
0.1
0
0
5
10
15
20
y
25
30
35
40
El problema y su solución quedan planteados entonces de la siguiente manera:
Regla Composicional de Inferencia: Dados un conjunto fuzzy A definido en el espacio X a
través de su función de pertenencia µA(x), y la relación (regla) R definida en el espacio XxY a
través de su función de pertenencia µR(x, y), es posible encontrar la función de pertenencia
µB(y) del conjunto fuzzy B definido en el espacio Y con la ecuación
µB(y) = max { min [µA(x) , µR(x, y)] }
(4.1)
∀x
El conjunto fuzzy B es el resultado de aplicar la relación (regla) R al conjunto A. La
operación se denomina composición y se representa como
B=A ◦ R
La ecuación (4.1) se denomina composición max-min, ya que se ha utilizado la operación
mínimo para resolver la intersección en µc(A)∩R(x,y). Utilizando la operación producto se obtiene
la llamada composición max-producto, donde en este caso
µB(y) = max [ µA(x) . µR(x, y) ]
(4.2)
∀x
4.2
Modus Ponens
Existe en lógica una regla básica de inferencia denominada Modus Ponens (o modus
ponendus ponens) que permite evaluar el siguiente razonamiento:
Si disponemos de la regla A → B , si se cumple A (A es verdadero) entonces se cumple B (B
es verdadero).
El siguiente ejemplo ilustra el uso de modus ponens para inferir una conclusión:
Premisa 1
A: El tomate es rojo
(hecho)
Premisa 2
R: Si el tomate es rojo, entonces el tomate está maduro
(regla)
Conclusión B: El tomate está maduro
Control Avanzado II
(consecuencia)
Página 16 de 20
Matemática del Control Fuzzy
Esta regla permite inferir resultados también para el caso aproximado, en el que se parte de
una premisa A’ que es parecida a la premisa A pero no exactamente igual. En este caso el
ejemplo anterior sería:
Premisa 1
A’: El tomate es rojo pálido
(hecho)
Premisa 2
R: Si el tomate es rojo, entonces el tomate está maduro
(regla)
Conclusión B’: El tomate está casi maduro
(consecuencia)
Las dos situaciones anteriores pueden representarse de la siguiente manera:
x es A
x es A’
Si x es A, entonces y es B
Si x es A, entonces y es B
y es B
y es B’
donde A’ es parecido a A y B’ es parecido a B. Este razonamiento se denomina Modus
Ponens Generalizado o Razonamiento Aproximado.
4.3
Razonamiento fuzzy
Sean A, A’ y B conjuntos fuzzy definidos en los universos X, X e Y respectivamente.
Sea A → B una implicación expresada como una relación fuzzy R definida en el dominio
X xY .
Luego, el conjunto fuzzy B’ inducido por el hecho “ x es A’ ” y la regla fuzzy “R: SI
< x es A > ENTONCES < y es B >” se define como
µB’ (y) = max { min [µA’ (x) , µR(x, y)] }
(4.3)
∀x
o en forma equivalente
B’ = A’ ◦ R = A’ ◦ ( A → B )
Estas conclusiones se aplican a continuación para encontrar la salida de un controlador
fuzzy.
∗
Una regla con antecedente simple
Entrada: x es A’ ;
R: SI < x es A > ENTONCES < y es B > ;
Salida: y es B’.
µ B ' ( y ) = max [ min( µ A ' ( x), µ R ( x, y )] =
∀x
= max [ min( µ A ' ( x), µ A ( x), µ B ( y ) ] =
∀x
{
}
= min max [ min( µ A ' ( x), µ A ( x))] , µ B ( y ) =
∀x
= min {w, µ B ( y )} = w ∧ µ B ( y )
donde
Control Avanzado II
Página 17 de 20
Matemática del Control Fuzzy
w = max [ min( µ A ' ( x), µ A ( x)) ] ; w es el grado de compatibilidad del antecedente, también
∀x
llamado peso del disparo.
1
1
0.9
0.9
0.8
µ A(x)
0.7
w
0.7
0.6
µ
∗
0.6
0.5
µ
0.4
0.5
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
-1
µ B(y)
0.8
µ A'(x)
-0.75
-0.5
-0.25
0
x
0.25
0.5
0.75
µ B'(y)
0
-1
1
-0.75
-0.5
-0.25
0
y
0.25
0.5
0.75
1
Una regla con antecedente múltiple
Entradas: x es A’ ; y es B’ ;
R: SI < x es A > Y < y es B > ENTONCES < z es C > ;
Salida: z es C’.
µ R ( x, y, z ) = µ A ( x ) ∧ µ B ( y ) ∧ µC ( z )
µC ' ( z ) = w1 ∧ w2 ∧ µC ( z )
w1 ∧ w2 = peso del disparo
1
0.8
µ A(x)
µ A'(x)
0.8
0.6
µ
µ
0.4
0.2
0.2
∗
µ B'(y)
µ B(y)
-0.75 -0.5 -0.25
0
x
0.25
0.5
0.75
1
0
-1
1
0.8
w1
0.6
0.4
0
-1
min
1
µ C(z)
0.6
µ
w2
µ C'(z)
0.4
0.2
-0.75 -0.5 -0.25
0
y
0.25
0.5
0.75
1
0
-1
-0.75 -0.5 -0.25
0
z
0.25 0.5
0.75
1
Múltiples reglas con antecedente múltiple
Entradas: x es A’ ; y es B’ ;
R1: SI < x es A1 > Y < y es B1 > ENTONCES < z es C1 > ; Salida de R1: z es C1’ ;
R2: SI < x es A2 > Y < y es B2 > ENTONCES < z es C2 > ; Salida de R2: z es C2’ ;
Salida: z es C’ = C1’ I C2’ .
Control Avanzado II
Página 18 de 20
Matemática del Control Fuzzy
min
1
1
µ A1'(x)
µ A1(x)
0.8
0.8
0.6
µ B1'(y)
0.8
0.6
0.4
0.4
0.2
0.2
0
-1 -0.75 -0.5 -0.25
0
x
0.25 0.5 0.75
0
-1
1
1
µ
0.8
0.8
µ A2'(x)
0.2
-0.75 -0.5 -0.25
0
y
0.25 0.5 0.75
0
-1
1
µ B2'(y)
0.8
0.4
0.4
0.2
0.2
0.2
0.25 0.5 0.75
1
0
-1
0.25 0.5 0.75
1
µ C2(z)
µ
0.4
0
x
0
z
0.6
µ
0
-1 -0.75 -0.5 -0.25
-0.75 -0.5 -0.25
1
µ B2(y)
0.6
µ
µ C1'(z)
0.4
1
µ A2(x)
µ C1(z)
0.6
µ
µ
0.6
1
µ B1(y)
-0.75 -0.5 -0.25
0
y
0.25 0.5 0.75
0
-1
1
1
µ C2'(z)
-0.75 -0.5 -0.25
max
0
z
0.25 0.5 0.75
1
0.8
0.6
µ C'(z)
µ
0.4
0.2
0
-1
Control Avanzado II
-0.75 -0.5 -0.25
0
z
0.25 0.5 0.75
Página 19 de 20
1
Matemática del Control Fuzzy
5
Bibliografía
♦
An Introduction to Fuzzy Control
Dimiter Driankov, Hans Hellendoorn & Michael Reinfrank
Springer-Verlag, Berlin Heidelberg, 1993
♦
Fuzzy Logic Systems for Engineering: A Tutorial
Jerry M. Mendel
Proceedings of the IEEE, Vol. 83, Nº 3
IEEE, 1995
♦
Tutorial On Fuzzy Logic
Jan Jantzen
♦
Fuzzy Logic
Lofti A. Zadeh
IEEE, 1988
Ing. Sergio Pastelletto
Depto. Control - Escuela de Electrónica
FCEIA - UNR
Control Avanzado II
Página 20 de 20