Inteligencia Artificial en medios de transporte
Anuncio

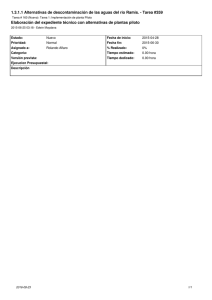
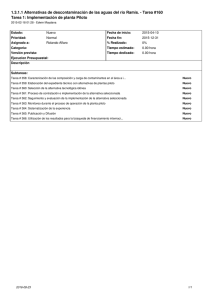
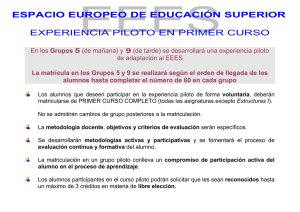
Inteligencia Artificial en medios de transporte Fernando Arboledas Cique Jesús de Luis Serrano Estudiante de Ing. Telecomunicación Universidad Carlos III de Madrid Avda. De la Universidad, 30 28911, Leganés (Madrid) Estudiante de Ing. Telecomunicación Universidad Carlos III de Madrid Avda. De la Universidad, 30 28911, Leganés (Madrid) [email protected] [email protected] RESUMEN En realidad existen muchas modalidades y, con lo concienciados que estamos en los últimos tiempos en materia de seguridad, no es raro ver que muchas aplicaciones se están desarrollando hacia esa dirección. De hecho un sistema autónomo sin que nos de una mínima garantía en materia de seguridad no debe existir. En este artículo intentaremos explicar la inteligencia artificial que se utiliza hoy en día en los diferentes medios de transporte, como son el avión, el barco y el automóvil. Como veremos, la industria de la aviación es la que mayor hincapié está haciendo en aras de conseguir una mayor seguridad y una menor dependencia del ser humano, seguida de la industria del automóvil donde ya hay varios prototipos en funcionamiento. 2. SISTEMA EXPERTO Como ya hemos adelantado, un sistema experto es una aplicación informática, o conjunto de ellas, capaz de actuar como una persona experta en un tema específico a tratar, aportando datos y experiencia para la resolución de problemas. Sin embargo, en la industria marítima se utiliza la inteligencia artificial para otros menesteres más propios de la seguridad que de conseguir embarcaciones autónomas. Aún queda bastante por desarrollar en este campo, que cada día va creciendo más en pos de conseguirlo. Categorías y descriptores temáticos [Inteligencia Artificial]: Sistemas expertos; [Aeronavegación]: Pilotaje; [Automovilismo]: Pilotaje; [Embarcaciones]: Seguridad. Términos generales Documentación, humanos, teoría. diseño, fiabilidad, seguridad, factores Palabras clave Sistema experto, aviación, barco, automóvil, uav, ucav, piloto, seguridad, práctica, futuro. 1. INTRODUCCIÓN Ilustración 1 Abstracción de un sistema experto hacia un ser humano. Un sistema experto es una rama de la inteligencia artificial que imita el razonamiento humano de un experto en una aplicación concreta. De esta forma se quiere buscar mejorar la seguridad, rapidez y eficacia. Son un conjunto de aplicaciones informáticas que poseen una base de conocimiento avanzado sobre el tema a tratar y que son capaces de adquirir nuevos conocimientos para utilizarlos en sus tareas. En el mundo de los medios de transporte podemos ver una aplicación estrella como sistema experto, y es la de crear vehículos autónomos, que no dependan directamente de la influencia humana.. Este tipo de sistemas ha de tener un manejo amigable con una interactuación sencilla y así poder realizar tareas propias de expertos sin tener unos conocimientos previos, o incluso poder prescindir de ellos. Para ello deben cumplir dos funciones vitales en su ejecución: § Tener una base de conocimientos: La cual ha de basarse siguiendo ciertas reglas o pasos comprensibles de manera que se pueda generar la explicación para cada una de estas reglas. § Tener capacidad de aprendizaje: Son sistemas capaces de aprender y corregir los conocimientos previos. Por lo que su finalidad no es sustituir a la persona, sino completar y mejorarla. Así pues, encontramos varios ejemplos importantes de lenguajes de sistemas expertos como son PROLOG o CLIPS, vistos en la asignatura. 2.1 Base de conocimientos Son bases de datos donde se almacenan los conocimientos de los sistemas expertos. Dichos conocimientos serán implementados sobre el sistema según el campo de trabajo en cuestión. Para su correcto funcionamiento, el sistema obtiene de esta base de conocimientos los razonamientos necesarios. 2.2 Base de hechos Compuesta por los hechos descubiertos durante el análisis que se realiza cuando existe algún problema. 3. PILOTO AUTOMÁTICO Un piloto automático es un sistema mecánico, eléctrico o hidráulico usado para guiar un vehículo sin la ayuda de un ser humano. El término se usa mayoritariamente para aludir al de un avión, pero también existen para barcos. Un vehículo con piloto automático utiliza unos sensores para desarrollar un conocimiento limitado del entorno, que más tarde es utilizado por los algoritmos de control para determinar la siguiente acción a realizar. Esto permite eliminar en gran parte las competencias de un humano para su pilotaje. Un piloto completamente autónomo tiene la habilidad de recopilar información de su entorno, sacar un contexto y obrar en relación al mismo. 4. Aviación Durante un vuelo los pilotos deben prestar una atención continua a la situación del avión. El piloto automático fue diseñado para aliviar la tensión y fatiga que éstos sufren a llevar a cabo dicho trabajo. 4.1 Fundamentos de vuelo Para entender el trabajo que puede realizar un piloto automático en una aeronave, debemos profundizar un poco más en la teoría en la que estos se basan para volar. Un avión es capaz de mantenerse en el aire, gracias a la fuerza de sustentación que se produce bajo sus alas. Dicha fuerza, unida a la de empuje contrarrestan las fuerzas de rozamiento y la de su propio peso. Ilustración 2 Diagrama de un experto 2.3 Motor de inferencia Inferencia es el acto o proceso de derivar conclusiones lógicas a partir de premisas conocidas o asumidos como ciertas. La conclusión que se extrae se llama también un idiomático. Las leyes de la inferencia válida se estudian en el campo de la lógica. Funcionamiento del proceso de inferencia: § § § § § detección de las reglas aplicables elección de reglas (resolución de conflictos) aplicación de la regla actualización de la base de conocimientos (repetir el ciclo hasta que no haya reglas aplicables) 2.4 Módulos de justificación Es el encargado de explicar y mostrar al usuario el razonamiento llevado a cabo para obtener la conclusión a la que el sistema experto ha llegado. 2.5 Interfaz de usuario La interfaz de usuario es el medio con que el usuario puede comunicarse con una máquina, un equipo o una computadora, y comprende todos los puntos de contacto entre ambos. Normalmente suelen ser fáciles de interactuar con, de entender y de ejecutar. Ilustración 3 Diagrama de fuerzas sobre una aeronave Como ya hemos dicho, para que una aeronave sea capaz de volar y mantenerse en el aire, debe tener también una fuerza de empuje, capaz de generar un movimiento del viento suficientemente rápido bajo las alas de forma que el aire que fluye por encima de las mismas lo haga a una velocidad superior a lo que lo hace por debajo, generando así la fuerza de sustentación antes mencionada. Por otro lado las aeronaves son capaces de rotar sobre los tres ejes para así poder maniobrar con cierta libertad de movimientos. El centro de gravedad de la aeronave es donde se juntan dichos ejes. En el siguiente diagrama se observan los movimientos que un avión puede realizar. en él. Dejando tareas más complicadas como despegar, aterrizar o elección de movimientos óptimos para la acción humanas y así poder decidir qué hacer en cada situación. 4.6.2 VANT Su función principal es la de poder sustituir totalmente la acción humana y no necesitar de ella en ningún momento del trayecto, siendo posibles realizar tareas mediante inteligencia artificial, tomando actos por sí mismo, como al aterrizar o despegar o varias trayectorias hacia una ruta óptima, ya sea por variación meteorológica o de cualquier otra índole. Ilustración 4 Ejes del avión y movimientos sobre ellos 4.2 Pilotos automáticos antiguos En los primeros modelos, el piloto automático conectaba un indicador de altitud, un giroscopio y una brújula a los alerones, timón y elevador. Con esto se conseguía que el avión volase de forma nivelada y recta en la dirección de la brújula, liberando en más de un 80% el trabajo total de un piloto. Éste tipo de modelo sigue siendo el más común y fiable, así como el menos caro. 4.3 Pilotos automáticos modernos Basan el control de la aeronave en un software que lee la posición actual de la misma y en comunión con el sistema de control de vuelo es capaz de guiarla. En este tipo de sistemas, muchos pilotos automáticos incorporan un control de empuje, que a través de regulación de ciertas válvulas, permite optimizar la velocidad del aire y mover el combustible por diferentes tanques para equilibrar la aeronave y mantenerla en una situación controlada durante el vuelo. Por lo general estos sistemas de pilotaje automático son capaces de volar con un consumo menor a lo que lo haría un piloto humano. 4.7 Seguridad A diferencia de otros campos, en la aviación aún no es posible eliminar el factor humando de la ecuación. Esto se debe a que aún no se ha conseguido, para la aviación comercial, una independencia absoluta en todas las fases del vuelo. Si bien es cierto que cada vez se está más cerca de conseguirlo. La IA nos permite ayudar a los pilotos a tener una menor fatiga y a hacerles más sencillo los miles de datos a tener en cuenta durante un vuelo. 4.8 En la práctica 4.8.1 RQ-180 El supuesto nuevo avión no tripulado que la compañía Northrop Grumman ha construido para EE.UU. según desvela un artículo en Aviation Week & Space Technology sobre la existencia de este aparato, un proyecto secreto que lleva años en desarrollo. El dron no solo está realizando ya pruebas de vuelo sino que, además, se esconde en un hangar de la base con espacio aéreo restringido Área 51. 4.4 Vehículo Aéreo No Tripulado Como su propio nombre indica son vehículos que no son tripulados, para diferenciarlos de misiles que, a veces, son auto dirigidos también, se impone que estos sean también reutilizables. Un VANT (o UAV de sus siglas en inglés) aumenta la seguridad ya que no existe la componente humana de posibles errores así como de, en caso de hipotéticos fallos, tener menos consecuencias. Existe otra rama dentro de estos que se dedica exclusivamente al combate. 4.5 Vehículo Aéreo de Combate No Tripulado Estos vehículos se utilizan en operaciones militares y es donde, a priori, podríamos encontrar más utilidades. Realizando operaciones de espionaje o vigilancia o entrando en combate sin necesidad de que haya victimas en caso de no acabar la misión de forma óptima. En inglés son llamados UCAV. 4.6 Diferencias entre piloto automático y VANT 4.6.1 Piloto automático Su función principal no es la de sustituir a una persona, sino la de realizar las operaciones más sencillas y rutinarias de este, como son el seguir un rumbo prefijado y hacer todo lo posible por seguir Ilustración 5 Avión no tripulado RQ-180 de la defensa de EE.UU. Según Aviation Weekly, el avión es capaz de volar de forma totalmente indetectable. Ahora mismo está en fase de pruebas, pero estaría listo para participar en misiones reales tan pronto como en 2015. Se cree que el dron podría haber estado en desarrollo en secreto desde el 2006. Northrop Grumman, la compañía detrás del proyecto, es uno de los mayores contratistas del Departamento de Defensa de EE.UU. Según Defense Tech, los hangares del Área 51 pueden albergar un avión con una envergadura de alas de más de 40 metros. Es decir, el nuevo RQ-180 podría ser mucho más grande que el actual RQ-170 Sentinel, utilizado en la operación para localizar a Osama Bin Laden y que tiene una envergadura estimada de alas de entre 20 y 27 metros. 4.8.2 Variante del Yak-130 En el Salón Aeronáutico que se celebró del 17 al 23 de junio en Le Bourget, cerca de París, donde Rusia presentó, entre otros aviones, el Yak-130, este avión recibió evaluaciones muy positivas. La principal ventaja del Yak-130 es que puede ser usado con el mismo buen resultado como avión de entrenamiento y como avión de combate. Y además tiene posibilidades de convertirse en un avión longevo. La estructura está diseñada para 30 años de servicio con un periodo de vida de 10.000 horas de vuelo o 20.000 aterrizajes en misiones de entrenamiento y combate. El diseño del aparato está realizado de conformidad con los últimos avances científicos. Pero sus características más relevantes vienen determinadas por los sistemas de inteligencia artificial. Los programas informáticos instalados en el sistema de mando del avión son desarrollados por un grupo especial de la oficina de diseño Sukhoi, dirigido por Pável Moskaliov. Los algoritmos propuestos por estos profesionales nos permitieron alcanzar la maniobrabilidad que vamos a demostrar en el MAKS2013. 4.8.3 Los drones de Amazon Hasta la fecha, en la compra on-line y dependiendo de la localidad en la que residas, puedes optar a recibir el pedido al día siguiente si las condiciones son favorables, aunque lo normal es que el tiempo de espera no suela ser inferior a 2 ó 3 días. Según Jeff Bezos esto puede cambiar con un nuevo sistema de reparto basado en drones auto dirigidos. El equipo de investigación y desarrollo de Amazon llevaba tiempo trabajando en un proyecto secreto que por fin han desvelado: Prime Air. La idea es la siguiente: compras un producto del catálogo de la tienda on-line y seleccionas esta forma de envío (siempre y cuando estés en el rango de alcance) porque en menos de media hora verás un dron aterrizando en tu casa con el producto. Amazon ha publicado un FAQ en el que explica que ya está esperando a que las autoridades den el visto bueno a este tipo de vuelos y esperan ponerlo en marcha en 2015. El servicio cubriría a los clientes ubicados en un radio inferior a los 16 kilómetros de los almacenes o centros de logística de la firma. Ilustración 7 Dron del proyecto Prime-Air de Amazon 5. Automóviles Ilustración 6 Yak-130 En cuanto al control en los grandes ángulos de ataque ya nos aproximamos a las características de un avión de quinta generación. Siempre es mucho más complicado construir una aeronave pequeña: los requisitos son los mismos que para un avión grande, pero falta espacio para colocar todos los equipos y sistemas. Por eso recurrimos a la inteligencia artificial, que permite optimizar los recursos disponibles. Ahora el propio avión recuerda al piloto qué tiene que hacer, mientras antes lo tenían que aprender de memoria los pilotos. El sistema de seguridad del Yak-130 permite evitar errores del piloto, incluso si el avión entra en picado, al alcanzar cierta altura, el sistema desactiva el mando manual y hace que el avión recupere la posición horizontal. Se está estudiando la posibilidad de desarrollar un avión aún más pequeño y menos costoso que el Yak-130 para la fase inicial de entrenamiento de pilotos. Sin adentrarnos mucho en el exaltadísimo mundo del automóvil, los principios básicos de sus movimientos de traslación vienen dado por un motor que convierte explosiones internas en un movimiento circular gracias al árbol de transmisión. Con dicho movimiento ya en la ruedas y gracias a la fuerza de rozamiento creada por el neumático y el asfalto, este se transmite al suelo y es capaz de iniciar la marcha. Además para poder cambiar de dirección hay varios sistemas, el más común es que las ruedas directrices sean las delanteras (aunque también pueden serlo las cuatro en algunos vehículos) y con ellas originar ese cambio. Ilustración 9 Diferentes sensores en un automóvil para detectar obstáculos en sus proximidades § Ilustración 8 Ejemplo de coche con cámara § 5.1 Razón de ser Los vehículos resultarían más rentables, estarían más aprovechados y contaminarían menos, ya que por ejemplo, en un hogar en vez de tener dos vehículos se podría tener solo uno (el coche te lleva al trabajo, regresa a tu casa para que lo use tu esposa). A partir de aquí nos podemos ir a algo más práctico aún ¿por qué necesita una familia un coche para ella sola? podríamos empezar por que familias completas que residen en la misma zona compartan coche, después que también lo hiciesen sus vecinos e incluso que urbanizaciones completas ofrezcan coches sin conductor como parte de la comunidad de propietarios o alquiler. 5.2 Cómo funcionan Por ejemplo desde hace un tiempo hay unos pequeños vehículos en las fábricas que se encargan de transportar determinadas piezas de un lugar a otro. Estos funcionan solos, comúnmente guiados por sensores situados en el pavimento de la fábrica. No se trata de un simple raíl por el cual estos robots se mueven, sino que dentro de los limites tienen una libertad casi completa y a pesar de esto no se produce choques entre ellos, debido a otros sensores que llevan y que detectan si en su camino hay algún obstáculo, ya sea otro vehículo o una persona. Y en caso de que así sea, se paran. El reto real supondría tener un coche completamente autónomo circulando por nuestras calles. Esto se hará mediante una serie de sensores que nos ayudarán en nuestra tarea. § § GPS: En este tipo de vehículos serán utilizados de forma muy profunda y han de ser capaces de dar un rendimiento muy bueno, siendo posible obtener la posición del coche con una precisión de 30cm. Radares: Los cuales estarán situados en diferentes posiciones estrategias por el exterior del vehículo. Estos radares tienen como objetivo detectar obstáculos que puedan haber en el trayecto del coche, los cuales son detectados estando a cien metros o más del vehículo. § Cámaras: situada en la parte superior de la luna delantera del coche hay una serie de cámaras ópticas que se encargan de identificar las señales de tráficos y las marcas que hay en la carretera. Lidar: es un radar que está situado en la parte más alta del coche que gira a diez revoluciones por minuto. Su alcance es de 100 metros y tiene como objetivo el de “dibujar” el entorno en el que se encuentra el coche. Procesamiento: toda la información captada por los anteriores elementos han de ser procesados de forma rápida, para obtener una respuesta rápida que permita al coche realizar la acción en el menor tiempo posible. 5.3 Seguridad La realidad ineludible es que en la inmensa mayoría de los accidentes es el factor humano el único culpable, por lo que la manera más sencilla de aumentar la seguridad en el tráfico es eliminar al automovilista. Sistemas de navegación que nos lleven directamente a una plaza libre de aparcamiento, comunicación con otros vehículos o con los semáforos para sincronizar nuestra velocidad con el tráfico en el cruce, compartir información sobre las condiciones de la circulación… son el paso previo a la eliminación total del conductor como principal actor en el automóvil. Además del apartado de seguridad también se podría optimizar el transporte en términos de ahorro de combustible y ahorros en tiempos y esperas. 5.4 En la práctica 5.4.1 El futuro ya está aquí La puesta en el mercado de vehículos sin conductor es ya una realidad. No obstante, su implantación será lenta, teniendo en cuenta que requiere adaptar tanto la infraestructura como la normativa en lo que a seguridad se refiere, al mismo tiempo que exige la aceptación social de la población. En este sentido, se prevé que en el plazo de 10 a 15 años se cuente con sistemas de asistencia al conductor, quedando aplazada su implantación en ciudades con tráfico intenso para dentro de 30 o 40 años. Diferentes marcas y organizaciones están poniendo empeño en que se avance en esta área, organizaciones como Google, con su capacidad en el ámbito informático y gracias a su gran encarta geográfica, google maps. Ilustración 11 Principio de flotabilidad Ilustración 10 Google-car El buque es un vehículo, normalmente de transporte, que navega por el mar o derivados (lagos, ríos, etc.). Ha de tener una serie de cualidades para navegar, que son: § 5.4.1.1 Volvo Volvo ha probado con éxito su sistema de piloto automático en carreteras españolas. El ensayo contó con tres coches de la marca sueca enganchados electrónicamente con un camión que actuó de guía de la caravana. 5.4.1.2 Nissan El fabricante de vehículos Nissan ha probado con éxito en una autopista japonesa su coche con piloto automático, un modelo de conducción que quiere empezar a comercializar en 2020. 5.4.1.3 Tesla Tesla está trabajando en tecnología que permite que los vehículos se conduzcan sin necesidad de que nosotros estemos directamente al mando. En una entrevista con Financial Times, Elon Musk ha declarado que su compañía entra de forma oficial en el negocio de los vehículos autónomos. § § § § § La solidez, exige una estructura del casco bien rígida para resistir los esfuerzos a los que el buque se ve sometido durante su vida por la acción de los diferentes estados de la mar y de los pesos que transporta. La estanqueidad, evita que entre agua en el interior del barco en cualquier circunstancia de tiempo meteorológico y lugar. La flotabilidad, permite al buque mantenerse a flote a pesar de que algunas de sus partes se encuentren inundadas. La estabilidad, da lugar a que vuelva a su posición de equilibrio por sí mismo, cuando ha sido desplazado por un agente externo (por ejemplo, el oleaje), en la estabilidad influyen los pesos y las formas del buque. La velocidad, va en función de las formas, de la potencia y del medio de propulsión del buque; motor o vela. La facilidad de gobierno, es una característica que se requiere en razón de la necesidad de movimiento del buque en todas las direcciones. 5.4.2 Volkswagen En 2012, Volkswagen presentó su piloto automático temporal, un sistema que puede dirigir un coche que circule por la autopista a una velocidad de hasta 130 km/h sin intervención humana. No falta mucho para que venga instalado de serie. Los investigadores de todo el mundo llevan años probando sistemas informáticos que permiten al conductor retirar las manos del volante. Como vemos es un campo que empieza a estar muy explotado, donde Google es el protagonista más destacado, pero donde ya están otros nombres como Audi, Mercedes, Nissan, Continental, General Motors, o Volvo. 6. Embarcaciones Se han realizado unos avances muy grandes y podemos encontrar pilotos automáticos para producirlos en masa, a pesar de ello nos quedamos con la sensación de que se ha explotado poco este campo en el mar, pudiendo haber avanzado mucho más de lo que se ha hecho. Es donde menos se ha explotado la IA y dónde aún le queda mucho por avanzar. 6.1 Principios de flotabilidad Viene dado por el principio de Arquímedes y por el que sabemos que todo cuerpo sumergido en un fluido experimenta un empuje vertical y hacia arriba igual al peso de fluido desalojado. Ilustración 12 Esquema de un motor de barco Existen diferentes tipos de propulsión marítima • • Turbina de gas, es una máquina térmica que desarrolla trabajo al expandir un gas. Se puede considerar un motor de combustión interna. Está compuesta por un compresor, una o varias cámaras de combustión y la turbina de gas propiamente dicha. Turbina de vapor, es una turbo máquina que transforma la energía de una corriente de vapor de agua en energía mecánica. Este vapor se genera en una caldera, de la que sale en unas condiciones de elevada temperatura y presión. En la turbina se transforma la energía interna del vapor en energía mecánica que se aprovecha un generador para producir electricidad. • • • Vela, Es utilizada para propulsar barcos mediante la acción del viento sobre ellas. Está dentro de lo que se denomina los aparejos del barco. Las velas pueden ser de dos clases: de cuchillo o áuricas y cuadradas o cuadras. Motor diesel, es un motor térmico de combustión interna en el cual el encendido se logra por la temperatura elevada gracias a la compresión del aire en el interior del cilindro. Fue inventado y patentado por Rudolf Diesel en 1892. Motor diesel-eléctrico, La fuerza motriz que se produce en el motor al girar el cigüeñal producto de la combustión interna es empleada para accionar un generador de corriente alterna (Alternador) o continua (Dínamo) adosado al motor diesel, generando corriente eléctrica que a través de un sistema compuesto esencialmente por conductores es llevada a motores eléctricos de tracción individuales que están alojados directamente sobre los ejes. 6.2 Piloto automático Un Piloto automático electrónico está controlado por un circuito electrónico que funciona de acuerdo con uno o más sensores de entrada, que comprenden al menos, una brújula magnética y, a veces, una veleta indicador de la dirección del viento o incluso un GPS para marcar la posición ante un punto de referencia elegido. El módulo de electrónica calcula la maniobra de dirección requerida y un mecanismo de transmisión (generalmente eléctrico, aunque puede ser hidráulico en sistemas más grandes) hace mover el timón de dirección de acuerdo con las desviaciones del rumbo correcto. Hay varias posibilidades para la interfaz entre el mecanismo de gobierno del piloto y el sistema de dirección convencional. En los yates, los tres sistemas más comunes son: Transmisión directa, en la que se conecta un actuador en el cuadrante de dirección del timón, en la parte superior del eje del timón en el interior del barco. Este es el método menos intrusivo de instalación. Ilustración 13 Piloto automático para barcos de trabajo Montaje en la rueda del timón, en el que se monta un motor con un desmultiplicador sobre rueda del timón, y se puede embragar y desembragar mientras está uso, liberando la rueda. Esto típicamente incluye una transmisión por correa dentada o un engranaje de conectado a la propia rueda, y es una opción común para las instalaciones ya existentes en yates con una rueda de timón. Pilotos de caña, que suelen ser la única opción en embarcaciones más pequeñas con un timón de caña. Se componen de un carnero de accionamiento eléctrico que se monta entre el timón y un orificio al lado de la cabina. Algunos son totalmente autónomos, necesitando sólo una fuente de alimentación, mientras que otros tienen la unidad de control separada del actuador. Los primeros son muy populares, ya que están libres de mantenimiento y son fáciles de instalar. 6.3 IA en embarcaciones Como podemos ver, en el terreno de pilotos automáticos se ha avanzado mucho, pero ya no tanto en una total independencia de la mano del ser humano en su pilotaje. Sería muy rentable y beneficioso conseguir barcos totalmente autónomos que transportasen mercancías y sólo necesitaran de la mano humana para la colocación de mercancías, pero aún queda mucho camino por recorrer. 6.4 Seguridad En cuanto a la seguridad se han hecho muchos avances y cada día vemos nuevas tecnologías. De hecho nuestra universidad es pionera también en este ámbito. Por otro lado ¿quién mejor que pensar en nuevas aplicaciones para mejorar las IA en estas embarcaciones que un experto en el tema? José Cigarrán, conocido regatista quiere adelantarse al tiempo para saber cómo va a responder, si rola a la izquierda o a la derecha, si amainará en una zona del campo de regata o aumentará el viento en el bordo que hemos escogido. La climatología al alcance del hombre en tiempo real. Hablar de IA (Inteligencia Artificial), en este sentido supone querer comprender y duplicar las funciones que caracterizan los aspectos más genuinos del comportamiento humano ordinario. Por ejemplo, lo que hace un médico todos los días cuando va a su consulta, independientemente de su tarea científico-técnica específica, consistente en analizar síntomas y proponer un diagnóstico y una terapia. Ilustración 14 Regata de carreras La representación computacional de este conocimiento, que no es específico de su actividad como experto en un dominio técnico, pero que es imprescindible para que esta actividad pueda realizarse, constituye la frontera más genuina entre la IA y la ciencia cognoscitiva. Algunas de sus características más distintivas son: poder verlos como algo más normal dado su elevadísimo precio, 130 millones de dólares. Su aparente simplicidad en el ser vivo. Así, si abrimos los ojos vemos de forma inmediata un conjunto de preceptos y lo mismo pasa al integrar los cinco sentidos en Preceptos más complejos. Análogamente, nos hablan y comprendemos los Conceptos e ideas que nos quieren transmitir. A la vez, razonamos y contestamos, etc... Y todo esto lo hacemos sin esfuerzo aparente. La enorme complejidad de estos procesos cognoscitivos “elementales” cuando queremos sintetizarlos. No existen soluciones satisfactorias al problema de la Comprensión de imágenes o del lenguaje natural. Las soluciones más avanzadas de la IA en estos campos están todavía lejos de las soluciones biológicas. Basta pensar en el razonamiento de sentido común o en el uso del lenguaje natural para detectar la distancia entre las soluciones naturales y las artificiales. 6.4.1 Universidad Carlos III de Madrid Una aplicación creada en la Universidad Carlos III de Madrid (UC3M) integra y unifica la información de distintos sensores y datos contextuales gracias a la inteligencia artificial, lo que permite controlar la navegación de hasta 2000 embarcaciones de distinto tamaño. Gracias a este sistema se puede mejorar sensiblemente la seguridad marítima en las zonas con mucho tráfico. Según explica el responsable del proyecto, Jesús García, el objetivo es garantizar la seguridad en una zona controlando los barcos que circulan por una vía marítima así como la entrada y salida del puerto comercial (normalmente con un tráfico mucho más alto). Para conseguirlo, se requiere una imagen completa precisa y actualizada similar a la que se ofrece a los controladores aéreos, de todas las naves que se encuentran en la zona de cobertura, para poder gestionar adecuadamente el tráfico marítimo y detectar anomalías con la mayor anticipación posible. 6.4.2 Universidad de Alcalá de Henares También desde una universidad de Madrid podemos encontrar grandes avances en la materia, así pues en la universidad de Alcalá se desarrolla un proyecto para la detección de barcos a pesar de que haya mucho oleaje. Raúl Vicen es el responsable del proyecto y explica que la ventaja de esta herramienta de detección de embarcaciones radica en la eliminación de forma inteligente del oleaje respecto del barco”. El aparato también podría utilizarse como sistema de ayuda para indicar a las embarcaciones el sistema de rutas alternativas para evitar tormentas, ha anunciado hoy la Universidad madrileña. El radar creado por el grupo del profesor elimina la información referente al oleaje en entornos marinos cambiantes y es capaz de detectar de forma automática y autónoma distintos tipos de embarcaciones. El equipo que dirige Vicen ha desarrollado un módulo 'software' para su integración en sistemas de radar cuya máxima cualidad es la robustez de su funcionamiento tanto si el mar está en calma como con fuerte marejada y en diferentes condiciones meteorológicas. 6.5 En la práctica El Halcón Maltes es la primera embarcación privada construida para navegar de forma autónoma. Realizado con velas de fibra de carbono futuristas tan alta como 20 pisos. Pero aún muy lejos de Ilustración 15 Halcón Maltés 7. REFERENCES [1] Wikipedia, Piloto automático. http://es.wikipedia.org/wiki/Piloto_autom%C3%A1tico [2] Ruesga Ibáñez, Daniel. Molla Ruiz, Héctor. Inteligencia artificial en el mundo de la aviación. http://www.it.uc3m.es/jvillena/irc/descarga.htm?url=practica s/11-12/05mem.pdf [3] Wikipedia. Vehículo aéreo no tripulado. http://es.wikipedia.org/wiki/Veh%C3%ADculo_a%C3%A9r eo_no_tripulado [4] UAV or UAV? http://www.uavs.org/index.php?page=what_is [5] Garrido Courel, Maite. Hacia una aviación no tripulada más segura. Agosto de 2013. http://www.eldiario.es/turing/pionero-compara-trayectoriasaviones-tripulados_0_158884243.html [6] Entrevista a Román Taskaév. Yak-130, avión ruso con inteligencia artificial. Septiembre 2013. http://sp.ria.ru/opinion_analysis/20130903/157982149.html [7] Méndes, Manuel Ángel. Este es el avión espía secreto que prueba EE.UU. en el área 51. Julio 2013. http://es.gizmodo.com/asi-es-el-avion-espia-secreto-queprueba-ee-uu-en-al-a-1478518951 [8] Mendiola, José. Amazon nos muestra el futuro. Diciembre 2013. http://es.engadget.com/2013/12/02/amazon-prime-air-dron/ [9] Sistemas de inteligencia artificial en aeronáutica y astronomía. Julio 2008. http://www.escuadron69.net/v20/foro/index.php?/page/index. html/_/aviacion-real/aviacion-militar/sistemas-deinteligencia-artificial-en-aeronaut-r1029 [10] Los coches de Google que se conducen solos. Enero 2012. http://www.ecointeligencia.com/2012/01/los-coches-degoogle-que-se-conducen-solos/ [11] Inteligencia artificial: Vehículos autónomos. Octubre 2011. http://alt1040.com/2011/10/inteligencia-artificial-vehiculosautonomos [12] La inteligencia artificial aplicada a nuestros autos. http://www.robotikka.com/7315/la-inteligencia-artificialaplicada-a-nuestros-autos/ [13] Más de 480K Km sin accidentes. Los vehículos autodirigidos de Google listos para ir al trabajo. Agosto 2012. http://www.puravida30.com/2012/08/vehiculosautodirigidos-Google-480k-sin-accidentes.html [19] Xakata. Tesla confirma que trabaja en un piloto automático para sus vehículos. Septiembre 2013. http://www.xataka.com/gadgets-y-coches/tesla-trabaja-enun-piloto-automatico-para-sus-vehiculos [20] Loos, Annekatrin. Con el piloto automático. http://www.dasauto-magazine.com/ES/en-el-passatautom%C3%A1tico/ [14] Fidalgo, Rubén. Piloto automático para coches: más problemas legales que técnicos. Noviembre 2012. http://www.autocasion.com/actualidad/reportajes/116437/pil oto-automatico-para-coches-mas-problemas-legales-quetecnicos/ [21] Piloto automático (Náutica). http://es.wikipedia.org/wiki/Piloto_autom%C3%A1tico_(n% C3%A1utica) [15] Europa Press. La Inteligencia Artificial permitirá incorporar a las vías públicas vehículos sin conductor en un plazo de 10 a 15 años. Noviembre 2011. http://www.20minutos.es/noticia/1214431/0/#xtor=AD15&xts=467263 [23] Maltes Falcon sailing yacht. http://www.tallsailsadventure.com/2007/08/maltese-falconsailing-yacht.html [16] EFE. Volvo prueba en España su sistema de piloto automático para coches. Mayo 2012. http://www.abc.es/20120529/tecnologia/abci-coche-pilotoautomatico-201205290811.html [17] EFE. Nissan prueba su coche con piloto automático en plena autopista japonesa. Noviembre 2013. http://www.efeempresas.com/noticia/nissan-prueba-sucoche-con-piloto-automatico-en-plena-autopista-japonesa/ [18] EFE. Japón implantará un sistema de coches con piloto automático en las autopistas. Agosto 2013. http://www.elperiodico.com/es/noticias/economia/japonimplantara-sistema-coches-con-piloto-automatico-lasautopistas-2610110# [22] Teki. La navegación. http://html.rincondelvago.com/navegacion-maritima.html [24] Flores, Javier. Inteligencia artificial para la vigilancia marítima. Octubre 2010. http://www.muyinteresante.es/innovacion/sociedad/articulo/i nteligencia-artificial-para-la-vigilancia-maritima [25] EFE. Un profesor español participa en creación de un radar 'inteligente' para barcos. Mayo 2009. http://www.hoytecnologia.com/noticias/profesor-espanolparticipa-creacion/112285 [26] Sinc. Mejoran la localización de barcos en las tormentas. Febrero 2011. http://www.agenciasinc.es/Noticias/Mejoran-la-localizacionde-barcos-en-las-tormentas [27] Cigarrán, José. Inteligencia Artificial aplicada en la Copa América. Abril 2006. http://blogs.periodistadigital.com/deportes.php/2006/04/26/p 23965