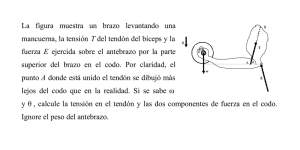
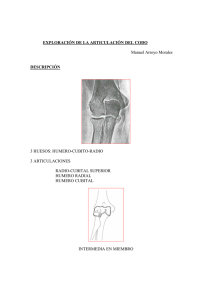
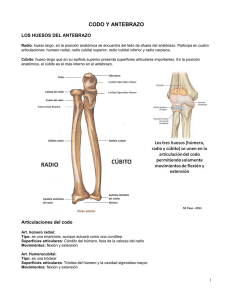
V JORNADAS CANARIAS DE TRAUMATOLOGIA y CIRUGIA ORTOPEDICA Anatomía y biomecánica del codo J. SANCHEZ DIAZ, R. NAVARRO GARCIA, A. MORA PUlG, O. MACIAS PEREZ, J.A. MEDINA HENRIQUEZ Anatomía El codo es un gínglimo, diartrosis o bisagra cuyo mivimiento es de flexión y extensión. Está formado por tres articulaciones interconectadas entre sí que son: - La articulación radiocubital proximal que es' una trocoides que sólo puede realizar movimientos de rotación. - La articulación humerocubital que es una articulación eminentemente de flexo-extensión, aunque el cúbito en dicha articulación tiene una rotación interna de 5o al comienzo de la flexión y una rotación externa de otros 5o durante la flexión terminal. - La articulación radiohumeral que también realiza movimientos de rotación, junto con la articulación radiocubital proximal. Todas ellal) son articulaciones sinoviales que se comunican entre sí. En cuanto a las eminencias óseas, el olecranon, la epitrocle y el epicóndilo se alinéan en el mismo plano horizontal con el codo en la extensión máxima y estas mismas prominencias forman los vértices de un tríangulo casi equilátero con el codo en 90 0 de flexión. La tróclea y el cóndilo se hallan en un plano algo anterior respecto de la diáfisis del húmero y el ángulo humeral inferior así formado mide hasta 60 o , pero como término medio unos 45 o. La mayor parte de la superficie articular de la tróclea es anterior y sólo una tercera parte es inferior. El tabique óseo comprendido entre el olécranon y la fosa coronoides es de espesor variable, en ocasiones falta o aparece perforado y existe un agujero supracondneo. La cápsula articular del codo es una membrana fina por delante y por detrás pero está engrosada en los costados donde forman los ligamentos colateral radial y cubital. También posee dos ligamentos menos importantes: el anterior y el posterior, siendo este último más débil. El ligamento colateral cubital (interno) compuesto de tres fascículos se extiende desde la epitróclea a la apófisis coronoides y aliado interno del olécranon. La porción de este ligamento inserta en el lado interno olécranon se denomina tambien ligamento BARDINET. El ligamento colateral radial (externo) que es análogo al precedente, se compone también de tres fascículos que insertos por arriba en el epicóndilo, van a fijarse por abajo en su parte central en el ligamento anular del radio y por delante y detrás en las márgenes de la escotadura radial del cúbito. Los ligamentos externo e interno aseguran la solidez de la charnela articular; por eso la luxación del codo no puede producirse sino cuando están desgarrados dichos ligamentos. . La articulación radiocubital superior es una artiuclación trocoidea, formada por el contorno de la cabeza radial y la cavidad sigmoidea menor del cúbito. Están unidos entre sí por dos ligamentos: - El ligamento anular inserto por sus dos extremidades por delante y detrás de la cavidad sigmoidea menor, rodea por su parte media extremidad superior del radio y la fija contra el cúbito. - El ligamento cuadrado de Denucé, extendido desde el reborde inferior de la cavidad sigmoidea menor a la parte correspondiente del cuello del radio, limita los movimientos de pronación y supinación del antebrazo. En cuanto a la musculatura, podemos dividir al codo en dos zonas: la anterior y la posterior. En la ZONA ANTERIOR tenemos 3 grupos musculares: A) Grupo medio: Formado por dos músculos que además son muy importantes, el bíceps braquial en un plano superficial que se inserta en la tuberosidad bicipital del radio. Es un músculo flexor y supinador del antebrazo. En el plano más profundo está el braquial anterior que se inserta en una superficie rugosa situada en la base de la apófisis coronoides del cúbito mediante un tendón ancho y grueso. Es también flexor del antebrazo. Están inervados ambos músculos por el nervio musculocutáneo y el braquial anterior además es también inervado por varios filetes procedentes del nervio radial. . BI Grupo muscular interno: En un primer plano tenemos cuatro mÚsC\.lIos que arrancan de la epitróclea. Son de fuera a dentro: Pronador redondo, palmar mayor, palmar menor y cubital anterior. Por debajo de estos cuatro músculos encontramos el flexor común superficial de los dedos que forma por sí sólo el segundo plano. Posee como el pronador redondo dos fascículos de origen: uno inserto en la epitróclea y otro externo procedente del borde interno de la apófisis coronoides. El tercer plano está formado por el flexor común profundo de los dedos al cual no se remonta hasta la epitróclea sino que toma sus inserciones de origen sobre la cara anterior del cúbito. Todos estos músculos menos el cubital anterior (que lo inerva el nervio cubital) son inervados por el nervio mediano. CI Grupo muscular exterior: El grupo externo y epicondneo comprende cuatro músculos superpuestos con regularidad que son yendo desde lo superficial a lo profundo: el supinador largo, el primero y segundo radiales externos y el supinador corto. De estos cuatro músculos, los tres primeros arrancan del borde externo del húmero y del epicóndilo; y el supinador corto de la parte posterior del húmero. Todos ellos están inervados por el nervio radial. En la ZONA POSTERIOR tenemos también grupos musculares: Al Grupo muscular medio: Ocupa la porción braquial de la región. Está constituido por un solo músculo, el tríceps braquial. Este músculo termina por un ancho tendón que va a insertarse en la cara posterior del olécranon as~ como en sus bordes laterales. Es el principal extensor del antebrazo y está inervado por el nervio radial. BI Grupo muscular externo: El grupo externo o epicondneo presenta cuatro músculos que son, contando de dentro a fuera: el ancóneo, el cubital posterior, el extensor propio del meñique y el extensor común de los dedos. El ancóneo reviste la forma de un tríangulo cuyo vértice corresponde al epicóndilo y cuya base se extiende a la vez sobre el lado externo del olécranon y sobre una pequeña superficie triangular que limita por detras del borde posterior del cúbito. El cubital posterior, el extensor propio del meñique y el extensor común de los dedos arrancan también de la cara posterior del epicóndilo, por fuera del músculo precedente. Todos ellos son inervados por el nervio interóseo posterior. CI Grupo muscular interno: El grupo interno o epitroclear no consta más que de un solo músculo, el cubital anterior. Se origina por dos manojos distintos, uno que se inserta en la epitróclea y otro que se fija en el lado interno del olécranon. Se unen a 1 ó 2 cms. de su origen. Su inervación es por el nervio cubital. Los nervios radial, mediano y cubital poseen relaciones íntimas e importantes con el codo y todos envían ramas a la articulación; otra inervación más de la articulación del codo proviene de los nervios musculocutáneo einteróseo posterior. El nervio radial descansa en el compartimento anterior del brazo al aproximarse al codo por el canal bicipital externo. A nivel de epicóndilo externo se divide en los nervios interóseo posterior y cutáneo lateral del antebrazo, pero antes de esta división envía ramas a los músculos braquial anterior, supinador largo y primer radial externo. El importante nervio interóseo posterior desciende entre los músculos bra" quial anterior y supinador largo, debajo de ambos músculos radiales y des- 37 © Del documento,los autores. Digitalización realizada por ULPGC. Biblioteca Universitaria,2011. Serl'Ício de Traumntología'y Cirugía Ortopédica . .Jefe de Serl'icio: Or. R. Namrro Carda. Hospital Insular. Las Palmas de Gran Canaria pués horada al supinador corto a nivel del cuello del radio por delante, desde donde corre en dirección distal y posteroextema por la Arcada de Frohse, dentro de la masa del supinador corto y en íntima relación con el radio. El nervio mediano es un importante elemento de la fosa cubital del codo que corre adosado a la superficie del braquial anterior, por dentro de la arteria humeral; desde la fosa desciende entre los dos vientres del pronador redondo, cruzando delante de la arteria humeral de la cual lo separa la porción cubital del músculo. El nervio cubital no emite ninguna rama hasta que llega al tunel cubital, donde inerva al cubital anterior y a la mitad del flexor profundo de los dedos; ambas ramas pueden salir del tronco del nervio 'antes de que éste entr.e en el tune!. La arteria humeral está aplicada sobre el músculo braquial anterior delante del codo y termina a nivel del cuello del radio al dividirse en las arterias radial y cubital saliendo a su vez de esta última la arteria interósea y la recurrente. Las venas superficiales de la extremidad superior son la cefálica, basmca y mediana antebraquial recibiendo anastomosis de las venas profundas. El complejo codo-antebrazo repesenta un "eslabón" en una cadena mecánica de palancas que empieza en el hombro y termina en las puntas de los dedos. Para realizar una tarea específica, fa mano debe colocarse primero en un punto apropiado del espacio y para este fin, la articulación del hombro permite llevar la mano a cualquier sitio de la superficie de una esfera imaginaria que repesenta toda la excursión del hombro con el codo extendido. El movimiento del codo sirve para ajustar la altura y longitud del miembro para llegar a cualquier punto que esté dentro de esta esfera de movimientos del hombro. Por último, el antebrazo rota para colocar la mano en la posición funcional más efectiva y además, moviendo el hombro puede acentuarse esta pronación y supinación; una vez bien ubicada la mano, los músculos actúan para aplicar fuerzas o resistirlas. No sólo se aplica la fuerza directamente con la prensión, sino que también de manera indirecta mediante una estabilización de las articulaciones que permite transmitir la fuerza desde la musculatura proximal del brazo y desde el resto del cuerpo. to del eje del codo y el ángulo entre el eje del antebrazo y el eje del codo son iguales. Clínicamente, el ángulo de porte anormal suele entrañar un componente rotatorio. Sin embargo Lyman Smith (1960) presentó unos diagramas mecánicos que demuestran que la rotación o desplazamiento lineal de un fragmento distal del húmero no altera el ángulo de porte a menos que haya "inclinación" o un cambio en el ángulo entre el eje del antebrazo y el eje del húmero; por consiguiente una de las ventajas primarias de la tracción es que previene la inclinación y la modificación del ángulo de porte aunque una fractura no esté reducida anatómicamente. ..Morrey y Chao (1976) señalan que el cúbito y por ende, todo el antebrazo, rote sobre su eje anatómico mayor durante la flexión-extensión cualquiera que sea el grado de pronación-supinación. Al comenzar la flexión ocurre una rotación interna de 5° y al final de la flexión una rotación extema de 50. Estas observaciones pueden tener trascendencia clínica porque esplican el aflojamiento de las prótesis de bisagra del codo, ya que estas prótesis no sólo impiden la rotación normal, sino que el problema puede complicarse por la posición incorrecta del eje. El plano de la cara superior de la cabeza radial se inclina hacia abajo y hacia fuera, en la pronación, debido al movimiento de rotación del radio alrededor del cúbito al realizarse la pronación; al iniciar el movimiento, en supinación, el eje diafisario del radio es vertical y paralelo al del cúbito. Al término del mismo, en pronación, el eje del radio es oblícuo hacia abajo y adentro: el plano de la cúpula radial, perpendicular a dicho eje, se inclina hacia abajo y hacia afuera y forma un ángulo con el plano horizontal. En este momento el eje diafisario del radio, "barre" una porción de superficie cónica cuyo eje es el eje común de las dos articulaciones radiocubitales. Observemos también que el cubitus valgus que en supinación se muestra muy claro parece desaparecer en pronación a causa del cambio de oblicuidad del eje diafisario del radio: en la pronación, el eje global del antebrazo se encuentra en la prolongación del eje del brazo. La membrana interósea se halla sometida a tensión máxima con el antebrazo en posición intermedia, punto en que las diáfisis del radio y del cúbito están más separadas entre ellas; esto explica que la inmoviliación del antebrazo en posición intermedia o 0° de rotación, ofrezca la mayor posibilidad de evitar las sinostosis de las fracturas complicadas. Cinemática Mecánica Una forma de evaluar los movimientos de una articulació'n es en "grados de libertad". En el caso del codo existen dos grados de libertad, uno originado por la articulación de bisagra cubitohumeral y el otro por las articulaciones radiohumeral y radiocubital que permiten la's rotaciones del antebrazo alrededor de un eje longitudinal casi perpendicular al eje del codo. La capacidad de flexión y extensión del codo abarca desde una posición extendida de 0° o ligera hipere,ctensión, hasta 160° de flexión . Esta gama de movimientos es limitada por las superficies articulares y demás estructuras circundantes. En cuanto a la congruencia articular se demostró que la coaptación articular de la articulación cubitohulT)eral es muy buena habiendo en cualquier momento del movimiento un mayor porcentaje de superficie articular en contacto entre el olécranon y la tróclea no ocurriendo lo mismo con la articulación radiohumeral donde la distribución de la carga y el contacto es menos pareja existiendo por tanto más posibilidad de desgaste. El eje del codo para el movimiento de flexión y extensión está dado por el eje transverso de húmero distal, que es algo oblícuo respecto al eje longitudinal de este hueso, en particular por la mayor profundidad del labio interno de la tróclea en comparación con el lado externo, esto produce el ángulo de porte (cubital) consistente en una desviación entre el eje mayor del húmero y el antebrazo extendido en supinación máxima. El ángulo de porte normal varía de 0° a 20° de valgo. Este ángulo desaparece en la flexión ya que el antebrazo y el húmero se alinean lT)ejor. Desde el punto de vista geométrico, estas relaciones dependen del hecho ~de g~e, por lo normal, el eje de la articulación del codo es la bisectriz del ángulo de porte, de modo que el ángulo del eje longitudinal del húmero respec- A los efectos las fuerzas mecánicas en cualquier articulación conviene hacer un diagramado reduciendo el sistema a sus partes esenciales. Con el miembro superior en reposo, el antebrazo cuelga relajado al costado. En este estado existen dos fuerzas iguales y de sentido contrario, una "fuerza activa" generada por la gravedad (peso del antebrazo) y una "fuerza de reacción" pasiva que sostiene al antebrazo. Esta fuerza de reacción o esfuerzo en los tejidos, se desarrolla por deformación elástica de los huesos, cartnagos y partes blandas que rodean a la artiuclación. Este sistema está en equilibrio porque la fuerza de reacción que actúa hacia arriba neutraliza a la fuerza de gravedad que actúa hacia abajo. Cuando el codo está en flexión de 90° actúan tres fuerzas. La primera es la gravedad o "peso" del antebrazo cuya línea de acción pasa por el centro de gravedad y genera un momento que tiende a causar rotación hacia la extensión. Para mantener el brazo en 90°, la musculatura flexora debe aplicar otra fuerza para generar un momento contral'io; como la discrepancia desde el eje de la articulación del codo hasta la inserción de los músculos flexores es más corta que desde la articulación hasta el centro de gravedad del antebrazo, debe aplicarse una fuerza muscular relativamente grande para que el "momento muscular" sea igual al "momento gravitacional" en términos del producto de fuerza por distancia. La tercera fuerza está representada por la "fuerza de reacción articular". Por supuesto para mantener este equilibrio, las fuerzas de dirección contraria tienen que sumar cero. Otro caso sería si nosotros hiciéramos tracción de un dinamómetro sujeto de la pared con el codo en 90°. En este caso se eliminaría la fuerza de gravedad ya que el centro de gravedad está directamente sobre la articulación por Biomecánica 38 © Del documento,los autores. Digitalización realizada por ULPGC. Biblioteca Universitaria,2011. V JORNADAS CANARIAS DE TRAUMATOLOGIA y CIRUGIA ORTOPEDlCA lo que no produce ningún momento. Entonces la fuerza que crea un momento que se opone a los flexo res es igual a la fuerza de reacción medida por el dinamómetro. Para que exista un equilibrio de fuerzas en este caso, la fuerza muscular tiene que ser igual a la fuerza del dinamómetro más la fuerza articular. En el caso de manten.er un objeto con el codo en 90 0 de flexión existiría una fuerza más que sería la del objeto. La fuerza ejercida por la musculatura flexora es un vector y como tal puede descomponerse en dos componentes rectangulares, estabilizador y rotatorio que se originan en la inserción muscular. Con el codo a 90 0 , toda la fuerza muscular flexora actúa sobre el brazo de palanca y se convierte en fuerza flexora. Con el codo en otros ángulos se descompone en dos vectores: Una fuerza creciente en el componente rotatorio ocasiona flexión a medida que el codo se aproxima a 90 0 • Para otros ángulos, las proporciones destinadas al componente estabilizador que produce compresión articular, son mayores y el vector rotacional es menor. La relación entre la magnitud del componente rotatorio y el ángulo del codo es no lineal y el rendimiento de la fuerza de rotación mejora con mayor rapidez a medida que el ángulo se acerca a 90 0 • Como las extremidades del hombre y de los animales tienen que ser delgadas en sus partes distales para reducir la inercia y facilitar la aceleración, para que una extremidad sea afinada en la punta los músculos grandes deben ser más proximales y a menudo terminar en largos tendones, pero al actuar con gran fuerza sobre sus cortos brazos de palanca pueden generar gran velocidad en el extremo de la extremidad a expensas de la fuerza bruta. Aunque estas fuerzas musculares imponen grandes fuerzas articulares que predispondrían a la artrosis, esto permite que el ser humano corra, salte, lance objetos y golpee con eficacia. Elftman (1969) señaló que en vista de que un músculo puede acortarse hasta un máximo de 60 0 de su máxima longitud (de reposo), la longitud muscular necesaria para conseguir la flexión completa es mayor a medida que el sitio de inserción en el hueso distal está más lejos de la articulación. Si la longitud del brazo de palanca en el hueso distal excede del 25% de la longitud del músculo, la contracción no podrá producir una flexión completa. Fisiología Muchos de los estudios fisiológicos de la musculatura del codo han sido orientados a la EMG pero los problemas para determinar la función individual de cada músculo se complican por la mecánica específica del codo, ya que determinados músculos en determinadas posiciones orientan gran parte de su fuerza hacia la compresión articular y no hacia la flexión. De esta manera en un estudio EMG un músculo puede contraerse con gran energía y sin embargo no colaborar demasiado en la fuerza flexora. De aquí la idea de Mc Conail, 1949, de designar a los músculos individuales como músculos de "arranque" y músculos de "puente". Los músculos de arranque que en el codo serían el bíceps y el braquial anterior son los más aptos teóricamente para inducir el arco de aceleración; los músculos de puenteo como el supinador largo, paralelos al eje mayor del hueso movido, aplican una fuerza centrípeta o estabilizadora de la articulación. Bibliografía 1. WADSWORTH, T.G. (1982): "El codo". Edit. El Ateneo. 1: 3-14; 2: 30-45. 2. TESTUT, L., JACOB, O. (1986): "Anatomía topográfica". Edit. Salvat. Miembro superior: 111: 723-757, IV: 758-777. 3. SOBOTTA I BECHER(1974): "Atlas de Anatomía Humana". 1: 196-209. 4. Mae CONAlll, M.A. (1949): "The movements of bones and joints. 2. Function of the musculature". Journal of Bone and Joint Surgery, 31B, 100. 5. MORREY, B.F. and CHAO, E.Y.S. (1976): "Passive motion of the elbow joint, a biomechanical analysis". Journal of Bone and Joint Surgery. 58A, 501-508. 6. ElFTMAN, H. (1966): "Biomechanics of muscle". Journal of Bone and Joint Surgery, 48A: 363. 7. SMITH, L. (1960): "Deformity following supracondylar fractures of the humerus". Journal of Bone and Joint Surgery, 42A: 235. 39 © Del documento,los autores. Digitalización realizada por ULPGC. Biblioteca Universitaria,2011. V JORNADAS CANARIAS DE TRAUMATOLOGIA y CIRUGIA ORTOPEDICA
 0
0
Anuncio
Documentos relacionados


Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados