20. MODELOS EMPIRICOS
Anuncio

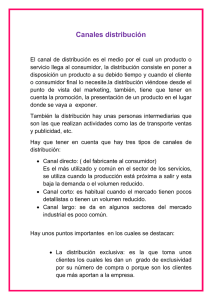
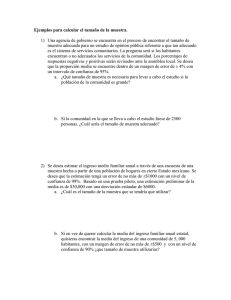
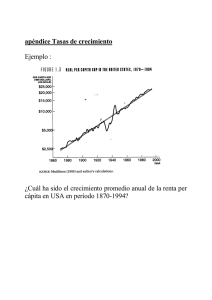
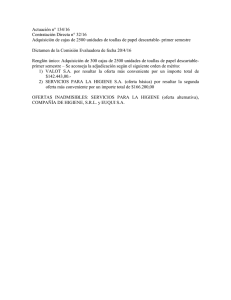
395 20. MODELOS EMPIRICOS Cuando se desconoce un modelo teórico para un proceso en funcionamiento, es posible plantear un modelo empírico haciendo ensayos de cambio en alguna condición de operación y registrando la variación de la variable de proceso que es afectada y que determina su estado o condición de operación. Un procesamiento de los datos obtenidos, experimentalmente, permite que se ajusten a un modelo matemático, que por la forma como se encuentra es de naturaleza empírica. Se puede afirmar, que los modelos empíricos, se utilizan especialmente: • En algunos procesos que se consideran muy complejos para modelarlos a partir de los principios fundamentales. • Para determinar algunos parámetros desconocidos en el modelo de un sistema. Muchos parámetros pueden calcularse a partir de datos de la planta en estado estacionario, pero otros deben determinarse a partir de pruebas dinámicas (por ejemplo, los tiempos de residencia en sistemas sin reacción) • Para verificar la consistencia del modelo matemático planteado teóricamente para el sistema. 20.1 IDENTIFICACION DE PROCESOS Por identificación de un proceso se entiende la descripción de su fenomenología mediante modelos empíricos. Entre los métodos conocidos para hacer identificación de procesos se encuentran el de la respuesta paso, la respuesta pulso, la respuesta impulso y el de la respuesta ATV (Autotune Variation). La forma más directa de obtener un modelo dinámico lineal empírico es mediante el ensayo conocido como una Identificacion Respuesta Paso, que consiste en hacer un cambio paso en una variable de entrada del proceso, registrar la variación en el tiempo de una variable de salida y ajustar estos datos a un modelo dinámico lineal con el cual se determinen los parámetros correspondientes. Este procedimiento es usual emplearlo con sistemas en lazo abierto, pero también es posible utilizarlo en sistemas en lazo cerrado. El método ATV se diferencia de los directos en que emplea un controlador de dos posiciones para identificar el sistema y sintonizar el controlador en un lazo cerrado. Los datos experimentales obtenidos con cualquiera de los métodos de identificación de procesos, se ajustan usualmente a modelos lineales de primer o segundo orden con tiempo muerto. Se considera que el 80% de los procesos químicos en lazo abierto pueden modelarse como sistemas de primer orden con tiempo muerto, es 396 decir, con tres parámetros como son la ganancia, la constante de tiempo y el tiempo muerto y una función de transferencia como la mostrada en la ecuación 20.1. Ke − t o s G1 ( s ) = τs + 1 (20.1) El análisis de los procesos en lazo cerrado se realiza, usualmente, de tal manera que al sintonizar su controlador se obtenga una respuesta en forma subamortiguada, razón por la cual debe aproximarse su dinámica a un modelo de segundo orden con tiempo muerte con una función de transferencia como la mostrada en la ecuación 20.2 Ke − to s G1 ( s ) = 2 2 τ s + 2ζτs + 1 (20.2) Lo anterior implica que sea necesario, adicionalmente, la determinación del factor de amortiguamiento. En la literatura se encuentra una amplia documentación sobre identificación de sistemas al igual que herramientas por computador para hacerlo en una forma fácil y rápida, como el “System Identification Toolbox” de Matlab. 20.2 APROXIMACION DE MODELOS DE ORDEN SUPERIOR La aproximación del ajuste de la dinámica de un sistema de orden superior a un modelo de primer orden con tiempo muerto se puede observar en la Figura 20.1. Los gráficos muestran la respuesta paso unitario de un sistema de dinámica lineal de sexto orden con función de transferencia dada por la ecuación (20.3) y la respuesta correspondiente a un modelo empírico de primer orden con tiempo muerto dado por la función de transferencia (20.4). G1 ( s ) = 10 . 3 (1 . 5 s + 1) 5 (15 . 2 s + 1) 10 . 3 e − 7 . 5 s G1 ( s ) = 15 . 2 s + 1 (20.3) (20.4) 397 Figura 20.1. Respuesta paso unitario de un sistema de sexto orden 20.3 IDENTIFICACION RESPUESTA PASO Se conoce como la Identificación Respuesta Paso de un sistema, al procedimiento experimental de introducir un cambio paso en una variable de entrada y registrar la respuesta del sistema, es decir, de una de sus variables de salida con el propósito de identificarlo con un modelo empírico. Para esto se consideran tres etapas que son: la formulación del modelo, la estimación de los parámetros y la validación del modelo La formulación del modelo consiste, por lo tanto, en el monitoreo de la respuesta del sistema para seleccionar un posible modelo potencial. La estimación de los parámetros consiste en la determinación de los parámetros desconocidos del modelo con los cuales se alcance el mejor ajuste de este a los datos experimentales registrados. La validación del modelo se realiza graficando la respuesta paso teórica del modelo en consideración y evaluando su ajuste a los datos experimentales. 20.4 MODELOS DE PRIMER ORDEN CON TIEMPO MUERTO El modelo empírico de un sistema de orden mayor ajustado a una dinámica de primer orden con tiempo muerto se puede determinar a partir de los datos 398 experimentales obtenidos con procedimientos de identificación como la respuesta pasos y con base en las propiedades teóricas que pueden deducirse de la respuesta dinámica que lo caracteriza. Con respecto a la estimación de parámetros se requiere de la estimación de la ganancia estacionaria, la constante de tiempo y el tiempo muerto. Estimación de la Ganancia Para un cambio paso ∆m en la variable de entrada, la respuesta de un sistema de primer orden con tiempo muerto es dada por la ecuación 20.5 Y (t ) = K ∆ m u (t − t o ) 1 − e − (t −to ) /τ (20.5) Siendo Y(t), la variable desviación de salida, cuyo valor es cero para un tiempo menor o igual que to La estimación de la ganancia correspondiente a un modelo empírico de primer orden con tiempo muerto se evalúa la ecuación 20.5 para cuando el tiempo tiende a infinito. De esto resulta que la ecuación 20.6 es la utilizada para la determinación de la ganancia estacionaria K = Y∞ ∆m (20.6) El valor último en la variable de salida, Y∞ , se lee en la aproximación gráfica y el cambio en la variable de entrada, ∆m, se ha fijado previamente. Estimacion de la Constante de tiempo y del Tiempo muerto Una transformación de la ecuación 20.5 permite expresarla en la siguiente forma Y − Y (t ) to t = ln ∞ − Y∞ τ τ (20.7) 399 Un análisis de la ecuación 20.7 permite deducir que un representación grafica, en 1 coordenadas semilogaritmicas, muestra una tendencia lineal de pendiente − que τ intercepta al eje de las ordenadas en un valor igual a to τ ; por lo tanto, con una regresión lineal de los datos experimentales se pueden determinar dicha pendiente e intercepto y con ellos los parámetros tiempo muerto y la constante de tiempo. También es fácil observar que el ajuste lineal intercepta al eje de las abscisas en el punto de valor igual al tiempo muerto, es decir, para t = t o Ajuste de datos a un Modelo de Primer Orden con Tiempo Muerto La Tabla 20.1 muestra los datos obtenidos, experimentalmente, de los valores que se observan en la temperatura del plato 16 de una columna de destilación, después de ser perturbada con un cambio paso en el flujo del reflujo que se alimenta debajo del mismo plato. Los valores respectivos en condiciones estacionarias son 380ºF y 25000 lb/h, respectivamente. Las primeras tres columnas contienen los datos tomados durante 14 horas de las variables de entrada y salida, respectivamente. La cuarta columna contiene los valores del cambio en la variable de entrada y que fácilmente se observa que es un cambio paso; la quinta columna contiene los valores de la variable desviación de salida y la sexta columna contiene los valores del cambio relativo de la variable desviación de salida, que es el termino cuyo logaritmo constituye el miembro derecho de la ecuación 20.7 El perfil grafico de los datos obtenidos es mostrado en la Figura 20.2 y permite decidir que el sistema se puede ajustar a un modelo de primer orden con tiempo muerto. A partir de la Tabla 20.1 se determinan los datos requeridos para la determinación de la ganancia. En la columna encabezada con el titulo Temperatura, Y(t), se encuentra que el cambio ultimo en la variación desviación de salida es = 15 y en la columna encabezada con el titulo Cambio Paso Reflujo, X(t), se observa . Por lo tanto, el valor de que el cambio paso en la variable de entrada es la ganancia es Para la estimación del tiempo muerto y la constante de tiempo se aplica la ecuación 20.7 para ajustar los datos a una función lineal con la cual determinar su pendiente e intercepto con el eje de las ordenadas y con esto la determinación de los valores de 400 los parámetros dinámicos. La Figura 20.3 muestra la variación de la respuesta del sistema con el tiempo en la forma semilogaritmicas de acuerdo a la ecuación 20.7. Tabla 20.1. Identificacion Respuesta Paso de una Columna de Destilacion Tiempo, h t<0 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.5 6.0 6.5 7.0 7.5 8.0 9.0 10.0 11.0 12.0 13.0 14.0 Reflujo, Temperatura, Cambio Paso Temperatura, lb/h ºF Reflujo, X(t) Y(t) 25000 27500 27500 27500 27500 27500 27500 27500 27500 27500 27500 27500 27500 27500 27500 27500 27500 27500 27500 27500 27500 27500 27500 27500 380.0 380.0 380.9 383.1 386.1 387.8 389.1 391.2 391.7 392.4 393.0 393.4 393.6 394.0 394.3 394.4 394.5 394.7 394.8 394.9 395.0 394.9 395.1 395.0 0 2500 2500 2500 2500 2500 2500 2500 2500 2500 2500 2500 2500 2500 2500 2500 2500 2500 2500 2500 2500 2500 2500 2500 0.0 0.0 0.9 3.1 6.1 7.8 9.1 11.2 11.7 12.4 13.0 13.4 13.6 14.0 14.3 14.4 14.5 14.7 14.8 14.9 15.0 14.9 15.1 15.0 1.000 1.000 0.940 0.793 0.593 0.480 0.393 0.253 0.220 0.173 0.133 0.107 0.093 0.067 0.047 0.040 0.033 0.020 0.013 0.007 0.000 0.007 -0.007 0.000 Un aproximación de la tendencia lineal obtenida en la Figura 20.3, permite determinar que esta se puede ajustar a la expresión 401 Figura 20.2 Respuesta Paso de una Columna de Destilacion Figura 20.3 Representación Semilogaritmica de la Respuesta Paso de una Columna de Destilación A partir de la función lineal se deduce que: 402 Y, por lo tanto, los valores de la constante de tiempo y el tiempo muerto son: horas Y el sistema se puede modelar, empíricamente, como de primer orden con tiempo muerto con función de transferencia dada por: 20.5 MATLAB: AJUSTE POLINOMICO DE DATOS En la columna de destilación estudiada en la sección 20.4 la Figura 20.2 se construye codificando con Matlab las matrices correspondientes a los valores del tiempo (primera columna, Tabla 20.1) y la variable desviación de salida, es decir, la Temperatura, Y(t), (quinta columna, Tabla 20.1) y, finalmente, utilizando el comando plot. La Figura 20.3 es un grafico en función del tiempo, de tipo semilogaritmico con respecto al eje de las ordenadas, de la variación relativa de la variable desviación de salida (Temperatura). El comando utilizado en Matlab para tal representación es semilogy(t,Y) Se debe tener en cuenta que con este comando, la escala logarítmica es en base 10 y para el propósito de la ecuación 20.7, el logaritmo es de base neperiana (natural), es decir, debe hacerse la conversión del dato leído sobre dicha grafica. De otra manera, se pueden calcular, previamente, los logaritmos naturales de los valores a representar en la ordenada y graficarlos en función del tiempo mediante el comando plot. 403 El ajuste de dichos datos a una tendencia lineal se hace con el comando polyfit cuya sintaxis es polyfit(x,y,n) Mediante el comando polyfit se ajusta un conjunto de datos “x” (variable independiente), ”y” (variable dependiente) a una expresión poli nómica de grado “n”. En el caso de la columna de destilación, los valores de la variable independiente son los de tiempo y los de la variable dependiente son los logaritmos naturales de las desviaciones relativas de la misma y como el ajuste es lineal, el grado es uno 20.5 CASO DE ESTUDIO Los resultados de una prueba paso desarrollada en un torre lavadora de SO2 son mostrados en la Tabla 20.2. La variable de entrada es el flujo de agua alimentada a la torre (en galones/minuto) y la variable de salida es la concentración de SO2 en la corriente de salida (en partes por millón) 1. Formule un modelo sencillo que represente a los datos tabulados y estime los parámetros del modelo propuesto 2. Obtenga la respuesta teorica del modelo formulado con respecto a la entrada considerada 3. Grafique la respuesta obtenida en el punto 2 junto con la de los datos tabulados y comente a cerca de la aproximación del modelo formulado con respecto a los datos 404 Tabla 20.2. Identificacion Respuesta Paso de una Columna Lavadora Tiempo s Flujo de agua Gpm Concentracion de SO2 ppm t<0 0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 80.0 90.0 100.0 110.0 120.0 130.0 140.0 150.0 160.0 170.0 180.0 190.0 200.0 220.0 240.0 500 400 400 400 400 400 400 400 400 400 400 400 400 400 400 400 400 400 400 400 400 400 400 400 25.00 25.00 25.00 25.01 25.00 25.06 25.15 25.30 25.39 25.45 25.53 25.60 25.63 25.67 25.74 25.78 25.82 25.85 25.88 25.89 25.90 25.89 25.90 25.90