Cuestiones teóricas - ELAI-UPM - Universidad Politécnica de Madrid
Anuncio

UNIVERSIDAD POLITÉCNICA DE MADRID
DEPARTAMENTO DE ELECTRÓNICA,
AUTOMÁTICA
E
INFORMÁTICA
INDUSTRIAL
Prácticas de Regulación Automática
Práctica 1
Introducción a las prácticas del laboratorio
de Regulación Automática
1.2
Introducción al laboratorio de Regulación Automática
1.1EQUIPOS DEL PUESTO DE TRABAJO ................................................................................. 4
1.2 PLACA EXPERIMENTAL DEL DEPARTAMENTO DE ELECTRÓNICA, AUTOMÁTICA
E INFORMÁTICA INDUSTRIAL....................................................................................................... 4
1.3
PROGRAMAS UTILIZADOS PARA LAS PRÁCTICAS ............................................................. 6
1.3.1
PROGRAMAS MATLAB Y SIMULINK DE MATHWORKS ............................................... 6
1.3.2
PROGRAMA DE SIMULACIÓN CC .................................................................................
1.4
NORMAS DE TRABAJO DEL LABORATORIO DE REGULACIÓN AUTOMÁTICA .................. 8
1.5
CUESTIONES PRÁCTICAS .................................................................................................... 9
1.6
ANEXO A: OSCILOSCOPIO DIGITAL .....................................................................................
1.9 ANEXO B: PRINCIPALES FUNCIONES DEL PROGRAMA MATLAB (TOOLBOX
CONTROL) ................................................................................................................................ 17
1.11
ANEXO C: PRINCIPALES FUNCIONES DE SIMULINK .................................................. 19
1.11.1 SIMULACIÓN DE UN EJEMPLO SENCILLO .................................................................. 19
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial
Introducción al laboratorio de Regulación Automática
1
1.3
Introducción a las prácticas del
Laboratorio de Regulación Automática
El Laboratorio de Regulación Automática tiene por objetivo que el alumno ponga
en práctica los conocimientos de la asignatura. Para ello se han desarrollado un conjunto de
prácticas en las que se incluye el modelado de los sistemas físicos, la implementación de
los circuitos de control y el uso de las técnicas de control para el análisis temporal y
frecuencial de estos sistemas.
Los desarrollos de estas prácticas son eminentemente experimentales, pero en todo
momento se hace énfasis y recordatorio de los conocimientos teóricos necesarios para su
realización. Cada práctica consta de un guión en el que se describen los fundamentos
teóricos y el planteamiento del trabajo a realizar. Las prácticas constan de unas cuestiones
teóricas, relativas al tema tratado, y de unas cuestiones prácticas que han de ser realizadas
en el laboratorio.
Como elementos de trabajo en las prácticas están los equipos de la Instrumentación
Electrónica (osciloscopios, polímetros, fuentes, ...) y las herramientas de simulación. Estas
últimas están destinadas tanto a procesar los datos obtenidos, como a simular el
comportamiento de los sistemas. Los simuladores tienen un papel fundamental en la
formación del alumno, ya que le permite la utilización de herramientas que son de una gran
ayuda para su trabajo como ingeniero, por ello se dedica parte de cada practica al uso de
los diferentes simuladores, con el objeto de reforzar los conocimientos teóricos y prácticos.
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial
1.4
1.1
Introducción al laboratorio de Regulación Automática
Equipos del puesto de trabajo
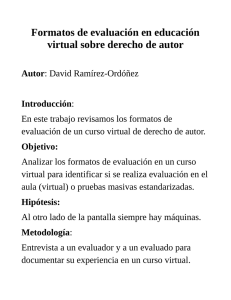
Los puestos de trabajo constan de los equipos mostrados en la figura 1.1, entre los
que destacan:
-
Osciloscopio analógico de dos
canales,
Generador de funciones,
Fuente de alimentación,
Polímetro,
Ordenador, y
Placa experimental de ELAI.
Además, en cada práctica se
contará con equipos adicionales para su
realización. Estos equipos van desde
componentes electrónicos hasta maquetas
sobre el control de motores de corriente
continua o el control de células Peltier.
Figura 1. 1 Puesto del laboratorio.
1.2 Placa experimental del departamento de Electrónica, Automática
e Informática Industrial
Este sistema tiene como objetivo que el alumno tenga un soporte físico idéntico
para casi todas las tareas experimentales del departamento ELAI-UPM. Bajo esta idea se
ha desarrollado un equipo que facilita el montaje de circuitos, permita acceder a las señales
con sencillez y posibilite la medida de señales con un osciloscopio digital. Consta de los
siguientes elementos:
Protoboard (1),
Tarjeta de interconexión (2),
Tarjeta de aislamiento galvánico (3) y
Bananas de alimentación simétrica (4).
La disposición del sistema queda reflejado en la figura 1.2.
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial
Introducción al laboratorio de Regulación Automática
1.5
Figura 1. 2 Placa experimental ELAI
Desde la protoboard el alumno podrá realizar sus montajes mediante la inserción de
los componentes y de los cables. La figura 1.3 muestra en detalle este componente.
Figura 1. 3 Protoboard (sobrescritas las líneas de conductividad)
Su conductancia está basada, según la disposición de la foto, en 4 vectores filas en
los exteriores y 65 x 2 vectores columnas en el interior. Cada vector tiene conductividad
interna y no está conectado con ningún otro vector. ¡ Ojo ! esto es verdad a excepción de
los vectores filas; hay que tener en cuenta que cada vector fila está dividido por la mitad,
esto es, no hay conductividad entre la mitad izquierda y la mitad derecha. Los vectores
filas serán utilizados para las conexiones de alimentación (+12V, 0V, -12V). Obsérvese el
esquema de conductividad.
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial
1.6
Introducción al laboratorio de Regulación Automática
La interacción entre el circuito montado y el exterior se realizará a través de la
tarjeta de interconexión. El uso de puentes eléctricos conectará la protoboard con la tarjeta
de interconexión; dando las siguientes prestaciones: a) alimentación simétrica, b) seis
canales de adquisición para el osciloscopio digital, enumerada del canal 0 al 5 y con rango
dinámico de 10V, y c) dos salidas de señal analógica de rango 0-10V o bien la resta de
ambas.
El equipo se alimentará con una tensión simétrica de 12V a través de las bananas.
El código de colores se mantendrá a lo largo del curso: rojo (+12V), negro (0V) y amarillo
(-12V). El alumno siempre verificará la correcta posición de la fuente de alimentación con
12V antes de aplicarla al equipo. Se medirá la tensión de la fuente con el polímetro con
anterioridad a la alimentación del equipo.
La tarjeta de aislamiento galvánico conecta las señales analógicas que se pretenden
medir con el ‘osciloscopio digital’. De hecho, esta tarjeta es parte del osciloscopio digital,
el cual está constituido por la tarjeta de aislamiento, una tarjeta de adquisición dentro del
PC y el software, SW, que permite monitorizar las señales dentro del entorno del sistema
operativo (Matlab & Simulink). Desde el punto de vista del alumno, el equipo es
transparente en su funcionamiento; sólo debe de conectar las señales a medir en alguno de
los seis canales y ajustar los parámetros de medida.
1.3
Programas utilizados para las prácticas
Para la realización de las prácticas de Regulación Automática es necesario la
utilización de las siguientes aplicaciones, orientadas a la simulación de los procesos
físicos:
1.3.1
-
Matlab de Mathworks. Entorno de programación de carácter general. Se
utilizará especialmente el toolbox de Control, Identificación, Adquisición de
datos y Simulink.
-
Simulink de Mathworks. Programa de simulación que trabaja sobre Matlab;
incorpora herramientas gráficas que facilita la interacción con el usuario.
Programas Matlab y Simulink de Mathworks
Matlab, el más empleado, es un programa que contiene un amplio conjunto de
herramientas matemáticas desarrollado para funcionar junto con diferentes herramientas,
como Simulink, a las que suministra todo tipo de operaciones matemáticas. Matlab
funciona desde la línea de comandos, con un lenguaje propio e interactivo con el usuario.
Todos los datos son tratados como matrices, existiendo diferentes posibilidades de
definición de matrices y todo tipo de funciones para su manipulación.
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial
Introducción al laboratorio de Regulación Automática
1.7
En estas prácticas se emplearán los comandos dedicados al control. En concreto, los
relacionados con la respuesta ante el escalón, el trazado del lugar de las raíces y la
respuesta en frecuencia. Se recomienda encarecidamente a los estudiantes que estudien y
practiquen la programación en MATLAB. Esta herramienta es cada vez más empleada en
el mundo laboral.
El programa Simulink funciona sobre MATLAB, instalándose como una
herramienta adicional (toolbox). Simulink es un entorno gráfico para la simulación de
sistemas físicos. El usuario especifica el comportamiento de los diferentes bloques a
simular y especifica cada una de sus entradas. Como resultado Simulink predice el
comportamiento del sistema físico mediante gráficos, o mediante datos escritos en un
fichero. Como principales características de este entorno de simulación destacan:
-
Los sistemas pueden ser construidos enlazando bloques sobre la pantalla.
-
Los diferentes bloques pueden ser modelados mediante funciones de
transferencia en el dominio de Laplace, ecuaciones en el espacio de estados,
funciones discretizadas en el tiempo o combinaciones de las anteriores.
-
Se incluyen bloques de elementos no lineales, como saturaciones o histéresis.
-
Se pueden incluir modelos no lineales de elementos conocidos para su
simulación.
-
Fácil construcción de diagramas de bloques de sistemas realimentados,
incluyendo comparadores, sumadores, ganancias, etc.
-
Elementos para la visualización de señales de salida, que simulan las funciones
de un osciloscopio.
Todos los cálculos que realiza Simulink podrían ser realizados únicamente con
Matlab; pero requeriría de un gran conocimiento de este lenguaje. Para el usuario de
Simulink, una vez arrancado Matlab y habiendo colocado el comando simulink en su línea
de comandos, no se precisa en ningún momento trabajar con Matlab.
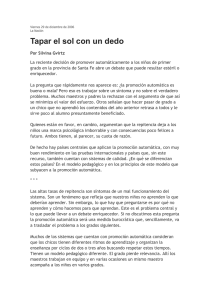
En la siguiente figura se muestra el funcionamiento del entorno de trabajo de
Simulink. En la esquina superior izquierda aparecen los iconos con las diferentes librerías
disponibles. En la esquina superior derecha se ha representado un diagrama de bloques de
un sistema de primer orden, en que se aplica un escalón como entrada y la salida es
visualizada por el bloque “scope”. La gráfica situada en la ventana inferior derecha es la
representación gráfica de la salida; y el resto de ventanas contienen diferentes bloques de
las librerías de Simulink.
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial
1.8
Introducción al laboratorio de Regulación Automática
Figura 1. 4 Pantalla de trabajo con Simulink
Los modelos se construyen seleccionando los correspondientes iconos de las
diferentes librerías y colocándolos sobre la ventana de construcción del modelo.
Finalmente se debe unir los diferentes bloques entre sí, debiéndose configurar sus
parámetros si fuera necesario. Las diferentes librerías de que se dispone son:
1.4
-
Sources, para definir las entradas del sistema, contando con diferentes tipos de
entradas que pueden ser parametrizadas por el usuario.
-
Sinks, con los elementos de visualización de variables y de salidas del sistema.
-
Discrete, para trabajar con bloques en la transformada z.
-
Linear, para definir bloques mediante la transformada de Laplace, o mediante
sus ecuaciones en función del tiempo.
-
Connections, con diferentes tipos de entradas y salidas.
-
Demos, con interesantes ejemplos de utilización de simulink.
Normas de trabajo del laboratorio de Regulación Automática
Es importante que durante el transcurso de las prácticas el alumno tenga en cuenta
los siguientes puntos:
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial
Introducción al laboratorio de Regulación Automática
1.5
1.9
-
Es el responsable en todo momento del material y de los equipos del puesto
designado; la ubicación siempre será la misma y se dirá el primer día de
prácticas.
-
Seguir las instrucciones del profesor para la realización de las prácticas.
-
Los montajes de los circuitos se realizarán en la protoboard, exigiéndose
claridad en la disposición de los componentes, colocando los elementos pasivos
en rotaciones a 90º y los cables eléctricos a ras de la placa y también en
rotaciones de 90º.
-
El material de las prácticas se entregarán en bolsas. Si faltase algún componente
o bien se necesitase algún cable, estos se pedirán al profesor; en ningún modo,
los alumnos tendrán acceso al armario de componentes ni tomarán cables de
otros puestos.
-
Las fechas de los exámenes, calificaciones, y revisión del examen de prácticas
aparecerán publicados en el tablón del Departamento, así como en la página
web del mismo (http://www.elai.upm.es).
-
http://www.elai.upm.es tendrá una página abierta a las cuestiones del
laboratorio de Regulación Automática. Apuntes, links, hojas de características,
ficheros de simulación, etc, todos ellos asociados al temario estarán disponibles
en este servidor WEB.
Cuestiones prácticas
La primera parte de la práctica consiste en familiarizarse con el equipo universal de
ELAI. Para ello se realizará las siguientes tareas experimentales:
1. Obtener el mapa de conductividad de la protoboard. Utilícese el polímetro y
averigüe y dibuje cuales son las zonas de conexión.
2. Poner la fuente de alimentación en posición de simetría y con un nivel de 12 V.
Emplear el código de colores de los cables de alimentación (rojo +12V, negro
0V y amarillo –12V). Verifique con el polímetro el nivel de tensión y conecte la
fuente con la tarjeta ELAI.
3. Empleando el generador de funciones y midiendo con el osciloscopio analógico,
ponga una señal senoidal de 100 Hz y 1 V de amplitud. Indique los valores de
ganancia del canal y base de tiempos, además de dibujar la forma de onda de
osciloscopio (empléese cuadrículas para la representación).
4. Esta misma señal mídase a la vez con el osciloscopio digital empleando
softscope (ver anexo A). Introduzca la señal en el canal 0. Seleccione los
parámetros para observar al menos dos ciclos completos. Capture la señal
muestreada y su espectro frecuencial con demoai_fft.
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial
1.10
Introducción al laboratorio de Regulación Automática
5. Cambie en el generador a una señal cuadrada de 50 Hz y una amplitud de 5V,
mídalo con el osciloscopio analógico, indique la gráfica y los valores de
ganancia y base de tiempos del osciloscopio. Ahora adquiera la señal a través
del osciloscopio digital. Introduzca la señal en el canal 0. Capture dos ciclos
completos y obtenga su transformada de Fourier.
La segunda parte trata de estudiar el comportamiento dinámico de los sistemas de
primer orden mediante el montaje de un circuito RC, el indicado en la figura adjunta,
siendo los valores de C = 10 nF y R = 100 k. El circuito tiene como excitación una señal
cuadrada de frecuencia 100 Hz y amplitud 1V, la cual imita entradas en escalón de forma
periódica. Se pide:
1. Simular el comportamiento del circuito y dibujar la respuesta, indicando los
valores más significativos de tensión y tiempo, tanto con MATLAB (utilizar las
funciones tf() y step()) como con SIMULINK.
2. Realizar el montaje utilizando como excitación el generador de funciones, y
visualizando la tensión entrada y de salida en el osciloscopio analógico.
Figura 1. 5 Red RC para el estudio de sistemas físicos.
3. Comparar los resultados teóricos, simulados y experimentales.
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial
Introducción al laboratorio de Regulación Automática
1.6
1.11
Anexo A: Osciloscopio digital
La interacción entre la tarjeta ELAI con otra de adquisición, incorporada dentro del
PC, permitirá la transferencia de señales eléctricas tanto analógicas como digitales entre el
exterior y el ordenador. En estas prácticas sólo se destacará la entradas y salidas
analógicas. Las señales eléctricas de las plantas de control continuo son de carácter
analógico. Por el contrario, los ordenadores emplean tecnología digital (eventos discretos
de valor finito y muestrado). De esta diferencia se requiere de la conversión analógicadigital, CAD, para introducir las señales eléctricas de la planta en el ordenador y también
se necesita de convertidores digitales-analógicos, CDA. Estos últimos permitirán mandar
órdenes desde el computador a los procesos continuos.
...
Además del soporte físico o hardware, se requiere del programa para canalizar los datos
adquiridos. En estas prácticas se empleará el toolbox de Matlab Data Acquisition. Este
software recoge una serie de
(bloqueador)
funciones desarrolladas en
Matlab que proporciona un
CDA
entorno de adquisición de datos
para PC, compatibles con las
Planta
siguientes
familias
de
(continua)
CDA
dispositivos de adquisición:
Computator
Advantech, Agilent , Keithley,
...
(sistema
discreto)
Measurement
Computing
Transductor 1
Corporation,
National
Instruments, puerto paralelo
CAD
MUX Transductor 2
(LPT1) y tarjetas de sonido
compatibles con Windows.
Data Acquisition toolbox se
estructura con dos tipos de
elementos que permiten el paso
entre el computador y el exterior:
Transductor n
(muestrador)
Ficheros M, corresponde con el programa fuente. Tiene su propia sintaxis, parecida
al lenguaje C. Definirá las características propias del proceso de adquisición a
través de comandos.
Controladores de dispositivos que trasladan las propiedades, eventos y datos entre
el motor de adquisición de datos de Matlab y el dispositivo físico de entrada-salida
empleado.
Para la adquisición, en primer lugar, se conecta Matlab con alguno de los diferentes
subsistemas de entrada-salida instalado en el PC. Matlab dispone de tres tipos de
dispositivos objeto: ai (entrada analógica), ao (salida analógica) y dio (entrada-salida
digital). Posteriormente se procederá a definir los parámetros de adquisición y por último
se capturará la información desde el exterior. La algoritmia procede con los siguientes
pasos:
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial
1.12
Introducción al laboratorio de Regulación Automática
1. Crear un dispositivo objeto, usando para ello las funciones de Matlab
analoginput, analogoutput o digitalio según sea el caso de una entrada analógica, salida
analógica o entrada-salida digital, respectivamente. El formato de uso de estas tres
funciones es idéntico, debiéndose indicar la denominación del driver dispuesto por Matlab
para la tarjeta de adquisición de que se dispone.
%% Uso del conversor analógico-digital, CAD
if (~isempty(daqfind))
stop(daqfind)
end
ai = analoginput ('advantech');
daqhwinfo(ai)
pause;
2. Configurar los canales de E/S, mediante la función addchannel. En ella se hace
referencia al dispositivo objeto creado anteriormente. Por ejemplo, para crear un canal de
entrada analógico usando el canal hardware 0 de la tarjeta se escribiría:
%% Definir el canal de adquisición
addchannel(ai,0);
3. Definir las propiedades para ajustar la adquisición de datos a nuestras
necesidades. En principio, las dos propiedades básicas que interesa ajustar son la
frecuencia de muestreo (SampleRate), el número de muestras por disparo
(SamplesperTrigger) .
%% Establecer las propiedades de muestreo
ai.SampleRate = 10000;
ai.SamplesPerTrigger = 200;
ai.TriggerType = 'Immediate';
4. Iniciar la adquisición o salida de datos usando la función start. Tras este punto
suele ser interesante hacer uso de la función getdata y plot o cualquier otra que permita la
visualización o procesamiento de los datos adquiridos y almacenados con la función
getdata.
%% Capturar las muestras
start(ai);
[d,t] = getdata(ai);
%% Visualización
figure(1);
plot(t,d);
5. Finalización del proceso haciendo uso de las funciones stop, delete y clear:
%% Detener adquisición
stop(ai);
delete(ai);
clear ai;
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial
Introducción al laboratorio de Regulación Automática
1.6.1
1.13
Adquisición de señales y cálculo de sus transformadas de Fourier
Empleando el generador de funciones y midiendo con el osciloscopio analógico,
ponga una señal senoidal de 100 Hz y 1 V de amplitud en el canal 0. Si se desea adquirir
cuatro ciclos enteros y por cada ciclo se debe tener 10 muestras, determine la frecuencia de
muestreo y el número de muestras a capturar. Calcule mediante la función fft de Matlab, el
espectro de la señal.
%% Uso del conversor analógico-digital
ai = analoginput ('advantech');
daqhwinfo(ai)
pause;
%% Definir el canal de adquisición
addchannel(ai,0);
%% Establecer las propieades de muestreo
fs = 1000; % 10 muestras por ciclo ya f = 100 Hz
ai.SampleRate = fs;
ai.SamplesPerTrigger = 40; % 4 ciclos
ai.TriggerType = 'Immediate';
%% Capturar las muestras
start(ai);
[d,t] = getdata(ai);
%% Visualización
figure(1);
plot(t,d);
%% Calculo de la transformada de Fourier
TF = fft(d);
f=(0:fs/length(d):fs-1)';
plot(f,abs(TF));
title('Módulo de la transformada de Fourier');
pause;
f=(0:fs/length(d):fs/2)';
plot(f,abs(TF(1:length(f))));
title('Ampliado hasta la frecuencia de Nyquist');
%% Detener adquisición
stop(ai); delete(ai); clear ai;
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial
1.14
Introducción al laboratorio de Regulación Automática
Cambie en el generador a una señal cuadrada de 50 Hz y una amplitud de 5V,
mídalo con el osciloscopio analógico. Introduzca la señal por el canal 0. Calcular la
frecuencia de muestreo si se desea 100 muestras por ciclo y una captura completa de 2
cuadros. Obtener el espectro de la señal.
%% Uso del conversor analógico-digital
ai = analoginput ('advantech');
daqhwinfo(ai)
pause;
%% Definir el canal de adquisición
addchannel(ai,0);
%% Establecer las propieades de muestreo
fs = 5000; % 100 muestras por ciclo ya f = 50 Hz
ai.SampleRate = fs;
ai.SamplesPerTrigger = 200; % 2 ciclos
ai.TriggerType = 'Immediate';
%% Capturar las muestras
start(ai);
[d,t] = getdata(ai);
%% Visualización
figure(1);
plot(t,d);
%% Calculo de la transformada de Fourier
TF = fft(d);
f=(0:fs/length(d):fs-1)';
plot(f,abs(TF));
title('Módulo de la transformada de Fourier');
pause;
f=(0:fs/length(d):fs/2)';
plot(f,abs(TF(1:length(f))));
title('Ampliado hasta la frecuencia de Nyquist');
%% Detener adquisición
stop(ai); delete(ai); clear ai;
Data Acquisition Toolbox ofrece dos aplicaciones gráficas para la adquisición de
señales y análisis del espectro: softscope y demoai_fft. La primera presenta un
osciloscopio digital, mientras que la segunda obtiene el espectro de la señal que está
adquiriendo. El comando softscope presenta un osciloscopio digital con mandos de
ganancia de tensión y base de tiempos. Se selecciona la tarjeta de adquisición y los canales
a visualizar, lanzándose posteriormente a su ejecución.
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial
Introducción al laboratorio de Regulación Automática
1.15
%% Osciloscopio
if (~isempty(daqfind))
stop(daqfind)
end
ai = analoginput ('advantech');
addchannel(ai,0);
softscope(ai);
La segunda aplicación, demoai_fft, muestrea la señal y calcula su transformada de Fourier.
Sólo tiene como parámetros, el nombre del fabricante, la identificación de la tarjeta y el
canal. Por ejemplo: demoai_fft('advantech',0,0);
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial
1.16
Introducción al laboratorio de Regulación Automática
Otra utilidad es el generador de señales: daqfcngen. Presenta la posibilidad de
mandar a través del CDA diferentes tipos de señales analógicas al exterior.
Estas funcionalidades también pueden ser aplicadas a la tarjeta de sonido del PC.
Así, por ejemplo, mediante el uso del micrófono se puede adquirir señales sonoras. Éstas
serán
muestreadas y con la utilizada demoai_fft('winsound',0,1) aparecerá
representada tanto en el tiempo como en frecuencia.
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial
Introducción al laboratorio de Regulación Automática
1.7
1.17
Anexo B: Principales funciones del programa MATLAB
(toolbox CONTROL)
» help control
Control System Toolbox.
What's new.
Readme
- New features and enhancements in this version.
Creation of LTI models.
tf
- Create a transfer function model.
zpk
- Create a zero/pole/gain model.
ss
- Create a state-space model.
dss
- Create a descriptor state-space model.
frd
- Create a frequency response data model.
filt
- Specify a digital filter.
set
- Set/modify properties of LTI models.
ltimodels
- Detailed help on various types of LTI models.
ltiprops
- Detailed help on available LTI properties.
Data extraction.
tfdata
- Extract numerator(s) and denominator(s).
zpkdata
- Extract zero/pole/gain data.
ssdata
- Extract state-space matrices.
dssdata
- Descriptor version of SSDATA.
frdata
- Extract frequency response data.
get
- Access values of LTI model properties.
Model dimensions and characteristics.
class
- Model type ('tf', 'zpk', 'ss', or 'frd').
isa
- Test if LTI model is of given type.
size
- Model sizes and order.
ndims
- Number of dimensions.
isempty
- True for empty LTI models.
isct
- True for continuous-time models.
isdt
- True for discrete-time models.
isproper
- True for proper LTI models.
issiso
- True for single-input/single-output models.
reshape
- Reshape array of LTI models.
Conversions.
tf
zpk
ss
frd
chgunits
c2d
d2c
d2d
-
Conversion to transfer function.
Conversion to zero/pole/gain.
Conversion to state space.
Conversion to frequency data.
Change units of FRD model frequency points.
Continuous to discrete conversion.
Discrete to continuous conversion.
Resample discrete-time model.
Overloaded arithmetic operations.
+ and - Add and subtract LTI systems (parallel connection).
*
- Multiply LTI systems (series connection).
\
- Left divide -- sys1\sys2 means inv(sys1)*sys2.
/
- Right divide -- sys1/sys2 means sys1*inv(sys2).
^
- LTI model powers.
'
- Pertransposition.
.'
- Transposition of input/output map.
[..]
- Concatenate LTI models along inputs or outputs.
stack
- Stack LTI models/arrays along some array dimension.
inv
- Inverse of an LTI system.
Model dynamics.
pole, eig
zero
pzmap
dcgain
norm
covar
damp
esort
dsort
-
System poles.
System (transmission) zeros.
Pole-zero map.
D.C. (low frequency) gain.
Norms of LTI systems.
Covariance of response to white noise.
Natural frequency and damping of system poles.
Sort continuous poles by real part.
Sort discrete poles by magnitude.
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial
1.18
Time delays.
hasdelay
totaldelay
delay2z
pade
Introducción al laboratorio de Regulación Automática
-
True for models with time delays.
Total delay between each input/output pair.
Replace delays by poles at z=0 or FRD phase shift.
Pade approximation of time delays.
State-space models.
rss,drss
- Random stable state-space models.
ss2ss
- State coordinate transformation.
canon
- State-space canonical forms.
ctrb, obsv - Controllability and observability matrices.
gram
- Controllability and observability gramians.
ssbal
- Diagonal balancing of state-space realizations.
balreal
- Gramian-based input/output balancing.
modred
- Model state reduction.
minreal
- Minimal realization and pole/zero cancellation.
sminreal
- Structurally minimal realization.
Time response.
ltiview
step
impulse
initial
lsim
gensig
stepfun
-
Response analysis GUI (LTI Viewer).
Step response.
Impulse response.
Response of state-space system with given initial state.
Response to arbitrary inputs.
Generate input signal for LSIM.
Generate unit-step input.
Frequency response.
ltiview
- Response analysis GUI (LTI Viewer).
bode
- Bode plot of the frequency response.
sigma
- Singular value frequency plot.
nyquist
- Nyquist plot.
nichols
- Nichols chart.
margin
- Gain and phase margins.
freqresp
- Frequency response over a frequency grid.
evalfr
- Evaluate frequency response at given frequency.
System interconnections.
append
- Group LTI systems by appending inputs and outputs.
parallel
- Generalized parallel connection (see also overloaded +).
series
- Generalized series connection (see also overloaded *).
feedback
- Feedback connection of two systems.
lft
- Generalized feedback interconnection (Redheffer star product).
connect
- Derive state-space model from block diagram description.
Classical design tools.
rltool
- Root locus design GUI
rlocus
- Evans root locus.
rlocfind
- Interactive root locus gain determination.
acker
- SISO pole placement.
place
- MIMO pole placement.
estim
- Form estimator given estimator gain.
reg
- Form regulator given state-feedback and estimator gains.
LQG design tools.
lqr,dlqr
- Linear-quadratic (LQ) state-feedback regulator.
lqry
- LQ regulator with output weighting.
lqrd
- Discrete LQ regulator for continuous plant.
kalman
- Kalman estimator.
kalmd
- Discrete Kalman estimator for continuous plant.
lqgreg
- Form LQG regulator given LQ gain and Kalman estimator.
augstate
- Augment output by appending states.
Matrix equation
lyap
dlyap
care
dare
-
solvers.
Solve continuous Lyapunov equations.
Solve discrete Lyapunov equations.
Solve continuous algebraic Riccati equations.
Solve discrete algebraic Riccati equations.
Demonstrations.
ctrldemo
- Introduction to the Control System Toolbox.
jetdemo
- Classical design of jet transport yaw damper.
diskdemo
- Digital design of hard-disk-drive controller.
milldemo
- SISO and MIMO LQG control of steel rolling mill.
kalmdemo
- Kalman filter design and simulation.
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial
Introducción al laboratorio de Regulación Automática
1.8
1.19
Anexo C: Principales funciones de Simulink
Simulink es un paquete de software para utilizar con MATLAB y que permite
modelar, simular y analizar sistemas dinámicos. Soporta sistemas lineales y no lineales,
modelados en tiempo continuo, muestreados o un híbrido de los dos. Los modelos no
lineales permiten tener en cuenta el rozamiento, la resistencia del aire y otras condiciones
que describen los fenómenos del mundo real. Los sistemas pueden ser también
multifrecuencia, es decir, tienen diferentes partes que se muestrean o actualizan con
diferentes velocidades.
Utiliza un entorno gráfico con diagramas de bloques para la representación del
modelo. La simulación es interactiva, de forma que se permite cambiar los parámetros del
sistema e inmediatamente ver lo que se sucede.
1.8.1
Simulación de un ejemplo sencillo
En este apartado se va a construir una demostración del funcionamiento de
SIMULINK, siga los siguientes pasos:
a) Arranque MATLAB efectuando un doble click sobre el icono de MATLAB.
b) Arranque SIMULINK escribiendo simulink en la ventana de órdenes. Aparece la
ventana de SIMULINK Library Browser.
c) Mediante la activación de la opción Create a new model (emplee un doble clic sobre
el icono de nuevo documento, situado en la esquina superior izquierda), aparecerá
una nueva ventana sin título. Ésta será el escenario para colocar los elementos de la
simulación.
d) Dentro de la biblioteca desplegar el menú de Simulink, observando la clasificación de
los objetos que se tienen. Éstos están agrupados en función de sus características. Así
por ejemplo, se seleccionará la sub-biblioteca Sources el generador de pulsos, el cual
se arrastrará hasta la nueva ventana. A continuación sobre este icono se hará variar
sus parámetros. Posteriormente, se realizará lo mismo con el grupo de Continuos,
eligiendo una función de transferencia (Transfer Fcn). Por último, empleando un
visualizador (Sinks/Scope) permitirá representar gráficamente la dinámica del
sistema.
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial
1.20
Introducción al laboratorio de Regulación Automática
e) Antes de pasar a la simulación será necesario realizar las conexiones entre los
distintos componentes. Con este objeto situar el puntero del ratón sobre la entrada o
salida del elemento, contemple cómo se convierte el puntero en una cruz. En este
preciso instante apriete el botón izquierdo del ratón hasta conectarlo con el bloque
siguiente deseado.
f) Para iniciar la simulación entre en la opción de los parámetros (menú
Simulation/Parameters). Ajuste los tiempos de inicio y final de la simulación. Luego
ya podrá empezar con ella al dar la opción (Simulation/Start). Un doble clip sobre el
visualizador mostrará los resultados.
g) Por último, y para guardar los resultados, salve el esquema realizado y cierre el
modelo mediante la opción Close del menú File.
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial
Introducción al laboratorio de Regulación Automática
1.21
Derecho de Autor © 2012 Carlos Platero Dueñas.
Permiso para copiar, distribuir y/o modificar este documento bajo los términos de la
Licencia de Documentación Libre GNU, Versión 1.1 o cualquier otra versión posterior
publicada por la Free Software Foundation; sin secciones invariantes, sin texto de la
Cubierta Frontal, así como el texto de la Cubierta Posterior. Una copia de la licencia es
incluida en la sección titulada "Licencia de Documentación Libre GNU".
La Licencia de documentación libre GNU (GNU Free Documentation License) es una
licencia con copyleft para contenidos abiertos. Todos los contenidos de estos apuntes
están cubiertos por esta licencia. La version 1.1 se encuentra en
http://www.gnu.org/copyleft/fdl.html. La traducción (no oficial) al castellano de la
versión 1.1 se encuentra en http://www.es.gnu.org/Licencias/fdles.html
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial