1. Control de Mínima Varianza
Anuncio

1.
1.
Control de Mínima Varianza
CONTROL DE MÍNIMA VARIANZA.....................................................................1
1.1. PLANTEO DEL PROBLEMA .........................................................................................2
1.2. CRITERIO DE OPTIMIZACIÓN .....................................................................................5
1.3. PREDICCIÓN ÓPTIMA .................................................................................................8
1.3.1. Forma intuitiva..................................................................................................8
1.1.1. Caso General...................................................................................................10
1.3.2. Cálculo del Predictor Óptimo.........................................................................14
1.3.3. Raíces de C Sobre el Círculo Unidad .............................................................18
1.4. CONTROL DE MÍNIMA VARIANZA ...........................................................................20
1.4.1. Interpretación como Ubicación de Polos .......................................................26
1.4.2. Sistemas con Inversa Inestable .......................................................................34
1.5. REGULADOR LINEAL ÓPTIMO ESTOCÁSTICO (LQG) ..............................................37
1.5.1. Factorización Espectral ..................................................................................41
1.5.2. Discusión Heurística .......................................................................................44
1.5.3. Demostración Formal .....................................................................................45
1.6. REFERENCIAS ..........................................................................................................48
Clase 13b Control de Mínima Varianza.doc 1
1.1. Planteo del Problema
Proceso
xk =
B1 ( q )
uk
A1 ( q )
y k = x k + vk
vk =
C1 ( q )
ek
A2 ( q )
[1.1]
[1.2]
[1.3]
con e ruido blanco, A2 ( q ) puede ser inestable, por lo tanto v puede no ser estacionario. Haciendo
A = A1 A2
B = B1 A2
[1.4]
C = C1 A1
se despeja v
A ( q ) yk = B ( q ) uk + C ( q ) ek [1.5]
Se supone que C tiene todos sus raíces dentro del círculo unidad.
Clase 13b Control de Mínima Varianza.doc 2
Ejemplo 1.1. Modificación de C
Sea
C (z) = z + 2
[1.6]
sea la señal
nk = C ( q ) ek
[1.7]
si e es ruido blanco, el espectro de n es
φ ( e jwT ) =
1
C ( e jwT ) C ( e − jwT ) [1.8]
2π
se cumple
C ( z ) C ( z −1 ) = ( z + 2 ) ( z −1 + 2 ) = (1 + 2 z −1 ) (1 + 2 z )
= ( 2 z + 1) ( 2 z + 1) = 4 ( z + 0,5) ( z + 0,5)
−1
−1
[1.9]
o sea que n se puede representar
nk = C * ( q ) ek = ( 2 z + 1) ek
[1.10]
Clase 13b Control de Mínima Varianza.doc 3
si algunas raíces de C están fuera del círculo se las reemplaza de esta manera
C = C +C −
+
C =C C
*
−*
[1.11]
Clase 13b Control de Mínima Varianza.doc 4
1.2. Criterio de Optimización
J mv = E { yk2 }
[1.12]
control de mínima varianza
1
J ∞ = lim E
N →∞
N
2
y
∑
k
k =1
N
[1.13]
control lineal cuadrático (lqr)
J lqr = E { yk2 + ρ uk2 }
[1.14]
Clase 13b Control de Mínima Varianza.doc 5
Ejemplo 1.2. Control de Mínima Varianza
yk +1 + ayk = buk + ek +1 + cek
[1.15]
con c < 1
e tiene media nula y varianza unitaria.
Se trata de mantener la salida lo más próxima a cero que se pueda.
Como ek +1 es independiente de yk se cumplirá
var ( yk +1 ) ≥ var ( ek +1 ) = 1[1.16]
Si se toma la ley de control
uk =
1
( ayk − cek )
b
[1.17]
en el siguiente instante resultará
yk +1 = ek +1 [1.18]
esto se cumple para todo instante o sea que el control se reduce a
uk = −
c−a
yk
b
[1.19]
es un control proporcional
Clase 13b Control de Mínima Varianza.doc 6
El denominador de lazo cerrado es
C (z) = z + c
[1.20]
de aquí la importancia de que este polinomio sea estable
La salida, con este control será
yk = ek + ( − c )
k − k0
(y
k0
− ek0 )
[1.21]
como c<1, el segundo término tiende a cero.
Este control da la mínima varianza de la salida.
La cantidad
− ayk + buk + cek
[1.22]
se puede interpretar como la mejor predicción de la salida en k+1
la cantidad ek +1 es el error de predicción
El control se puede redefinir como el que hace que el error de predicción sea
mínimo
En este caso el error de control es igual al error de predicción
Predicción y control están ligados
Clase 13b Control de Mínima Varianza.doc 7
1.3. Predicción Óptima
Se asume:
que el sistema está perturbado por ruido blanco gaussiano y que el mejor predictor es el que minimiza el error de predicción en sentido medio cuadrático.
1.3.1. Forma intuitiva
C * ( q −1 )
C (q)
yk =
ek = * −1 ek
A( q)
A (q )
[1.23]
donde
A* ( q −1 ) = q − n A ( q )
[1.24]
(se hace esto por una cuestión de causalidad)
Se asume que A y C son de orden n.
En el instante k se conocen yk , yk −1 ,
y se desea predecir yk +m
Clase 13b Control de Mínima Varianza.doc 8
Si se desarrolla en serie, se obtiene
yk + m =
C * ( q −1 )
A (q
*
−1
)
ek + m = ek + m + f1ek + m−1 +
+ f m−1ek +1 + f m ek + f m+1ek −1 +
desconocidos
[1.25]
conocidos
Si C es estable se puede calcular e en base a las medidas de y.
ek =
A* ( q −1 )
C (q
*
−1
)
yk
[1.26]
La mejor predicción será
yˆ k +m / k = f m ek + f m+1ek −1 +
[1.27]
y el error de predicción es
yk +m / k = ek +m + f1ek +m−1 +
+ f m−1ek +1
[1.28]
Resta calcular los f i
Clase 13b Control de Mínima Varianza.doc 9
1.1.1. Caso General
El predictor de mínima varianza a m pasos está dado por
yˆ k +m / k
G * ( q −1 )
G (q)
y k = * −1 y k
=q
C (q)
C (q )
[1.29]
m +1
q
C
donde F y G son el cociente y el resto de la división
q m−1C ( q ) = A ( q ) F ( q ) + G ( q )
A
, es decir:
[1.30]
El error de predicción es un promedio móvil con media nula
yk +m / k = yk +m − yˆ k +m / k = ek +m + f1ek +m−1 + + f m−1ek +1
[1.31]
= F ( q ) ek +1
su varianza es
E
{( yk +m / k )
2
} = (1 + f
2
1
+
+ f m2−1 ) σ 2
[1.32]
Clase 13b Control de Mínima Varianza.doc 10
- Demostración
El polinomio F es de grado m-1 y mónico.
El grado de G es menor a n
F ( q ) = q m−1 + f1q m−2 +
G ( q ) = g0 q
n −1
+ g1q
n −2
+ f m−1
+
+ g n −1
[1.33]
o
F * ( q −1 ) = 1 + f 1 q − 1 +
G (q
*
−1
)=g
−1
0
+ g1q +
+ f m−1q − m+1
+ g n −1q
− n +1
[1.34]
se debe cumplir
C * ( q −1 ) = A* ( q −1 ) F * ( q −1 ) + q − m G * ( q −1 )
[1.35]
las ecuaciones [1.23] y [1.25] se pueden reescribir
yk + m =
C * ( q −1 )
A (q
*
−1
)
ek +m = F * ( q −1 ) ek +m +
desconocido
G * ( q −1 )
A (q
*
−1
)
ek
[1.36]
conocido
Clase 13b Control de Mínima Varianza.doc 11
sabiendo la relación entre e e y
yk +m = F * ( q −1 ) ek +m +
G * ( q −1 )
C (q
*
−1
)
yk
[1.37]
Suponiendo que la predicción es una combinación lineal arbitraria de medidas
de la salida, la varianza del error de predicción será
E
{( y
k +m
− yˆ k +m / k )
2
} = E {( F ( q ) e ) }
*
−1
2
k +m
+2 E F * ( q −1 ) ek +m
(
)
2
G * q −1
(
)
+ E * −1 yk − yˆ k +m / k
C ( q )
G * ( q −1 )
* −1 yk − yˆ k +m / k
C (q )
[1.38]
el último término tiende a cero ya que e es incorrelado con la salida.
El predictor que minimiza esta varianza es el que hace cero el segundo término
o sea
yˆ k +m / k =
G * ( q −1 )
C (q
*
−1
)
yk
[1.39]
Clase 13b Control de Mínima Varianza.doc 12
El mejor predictor es lineal. Esto surge al poder eliminar el tercer término en el
cálculo de la varianza.
El error de predicción es
yk +1/ k = yk +1 − yˆ k +1 = ek +1
[1.40]
Por esto se dice que la variable e es la innovación del proceso y.
Con este predictor el funcional resulta
J (m) = E
{
( yk + m / k )
2
} = (1 + f
2
1
+
+ f m2−1 ) σ 2 [1.41]
Clase 13b Control de Mínima Varianza.doc 13
1.3.2. Cálculo del Predictor Óptimo
Igualando términos en la ecuación [1.30]
c1 = a1 + f1
c2 = a2 + a1 f1 + f 2
cm−1 = am−1 + am−2 f1 +
+ a1 f m−2 + f m−1
cm = am + am−1 f1 +
+ a1 f m−1 + g0
cm+1 = am+1 + am f1 +
+ a2 f m−1 + g1
cn = an + an −1 f1 +
0 = an f + an −1 f 2 +
+ an −m+1 f m−1 + g n −m
+ an −m+2 f m−1 + g n −m+1
[1.42]
0 = an f m−1 + g n −1
es la solución de una ecuación diofantina
Clase 13b Control de Mínima Varianza.doc 14
Ejemplo 1.3. Predictor
A ( q ) = q 2 − 1,5q + 0,7
C ( q ) = q − 0,2q + 0,5
2
[1.43]
El predictor a 3 pasos se calcula
q 2 ( q 2 − 0,2q + 0,5) = ( q 2 − 1,5q + 0,7 )( q 2 + f1q + f 2 ) + g0 q + g1
[1.44]
−0,2q 3 + 0,5q 2 = ( −1,5 + f1 ) q 3 + ( 0,7 + 1,5 f1 + f 2 ) q 2
+ ( 0,7 f1 − 1,5 f 2 + g0 ) q
[1.45]
+0,7 f 2 + g1
f1 = 1,3
f 2 = 1,75
g0 = 1,715
[1.46]
g1 = −1,225
El predictor resulta
yˆ k +3/ k
qG ( q )
1,715q 2 − 1,225q
yk = 2
yk
C (q)
q − 0,2q + 0,5
[1.47]
Clase 13b Control de Mínima Varianza.doc 15
y su varianza es
E { y 2 } = 1 + (1,3) + (1,75) = 5,7525
2
2
[1.48]
Clase 13b Control de Mínima Varianza.doc 16
Ejemplo 1.4. Influencia del horizonte de predicción
La varianza depende de los términos de F. Estos aumenta con el horizonte m.
Como F se obtiene dividiendo C con A, sus elementos corresponden a la respuesta impulsional del sistema
C (q)
q 2 − 0,2 q + 0,5
yk
ek = 2
ek
A(q)
q − 1,5q + 0,7
= (1 + 1,3q −1 + 1,75q −3 + 1,715q −3 +
)e
k
[1.49]
∞
= ∑ f j ek − j
j =0
y el costo de la predicción
E{y
2
m −1
}=σ ∑ f
2
2
j
[1.50]
j =0
--------figuras 12 2 -----------
Clase 13b Control de Mínima Varianza.doc 17
1.3.3. Raíces de C Sobre el Círculo Unidad
Ejemplo 1.5. Una Raíz en Uno
yk = ek − ek −1
[1.51]
yˆ k +1/ k = − ek
[1.52]
calculando e en base a y
k
ek = ek0 −1 + ∑ yi = ek0 −1 + zk
[1.53]
i = k0
no va a cero ya que ek0 −1 no se anula.
----------usar filtro Kalman--------------
Clase 13b Control de Mínima Varianza.doc 18
Ejemplo 1.6. Modelo de Señal Continua
A ( q ) yk = C ( q ) ek + b
[1.54]
se puede eliminar b haciendo
( q − 1) A ( q ) yk = ( q − 1) C ( q ) ek + b
[1.55]
y considerar una nueva variable
A ( q ) ∆yk = ( q − 1) C ( q ) ek = C ( q ) ek
[1.56]
pero en C ( q ) aparece una raíz en uno.
Hay que evitar estos modelos.
Clase 13b Control de Mínima Varianza.doc 19
1.4. Control de Mínima Varianza
B * ( q −1 ) − d
C * ( q −1 )
B (q)
C (q)
yk =
uk +
ek = * −1 q uk + * −1 ek [1.57]
A( q)
A( q)
A (q )
A (q )
B estable
d = gradoA − gradoB
gradoC = gradoA = n
haciendo m=d, se obtiene
yk + d =
C * ( q −1 )
A (q
*
−1
)
ek + d +
B* ( q −1 )
A (q
*
−1
)
uk = F * ( q −1 ) ek + d +
G * ( q −1 )
A (q
*
−1
)
ek +
B* ( q −1 )
A (q
*
−1
)
uk
[1.58]
se sabe además, que para las muestras conocidas se puede calcular e
ek =
A* ( q −1 )
C (q
*
−1
)
yk −
B * ( q −1 )
C (q
*
−1
)
q − d uk
[1.59]
reemplazando,
Clase 13b Control de Mínima Varianza.doc 20
yk +d = F * ( q −1 ) ek +d +
= F (q
*
−1
)e
k +d
+
G * ( q −1 )
C (q
−1
G
*
−1
C
*
*
yk −
)
(q ) y
(q )
−1
+
k
G * ( q −1 ) B * ( q −1 )
A (q
*
B
*
q − d uk +
) C (q )
(q ) F (q ) u
C (q )
−1
*
−1
−1
*
−1
*
−1
B * ( q −1 )
A (q
*
−1
)
uk
[1.60]
k
Se debe calcular la acción de control tal que minimice la varianza de la salida
E
{( y
k +d
)
2
} = E {( F ( q ) e ) }
−1
*
2
k +d
2
*
*
−1
−1
G * q −1
B ( q ) F ( q )
(
)
uk
+ E * −1 y k +
*
−1
C (q )
C ( q )
[1.61]
el único término manejable es el segundo, que debe ser cero,
uk = −
G * ( q −1 )
B (q
*
−1
) F (q )
*
−1
yk = −
G (q)
yk
B (q) F (q)
[1.62]
se interpreta como una predicción a d-pasos
La salida entonces resulta
yk = F * ( q −1 ) ek = ek + f1ek −1 +
+ f d −1ek −d +1
[1.63]
es un promedio móvil de longitud d-1.
Clase 13b Control de Mínima Varianza.doc 21
La covarianza se extinguirá para separaciones mayores a d-1. Esto se utiliza
como diagnóstico
Hay cancelación de los ceros del proceso
Clase 13b Control de Mínima Varianza.doc 22
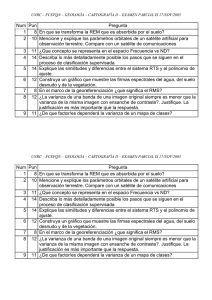
Ejemplo 1.7. Control de mínima Varianza
A ( q ) = q 3 − 1,7q 2 + 0,7q
B ( q ) = q + 0,5
[1.64]
C ( q ) = q 3 − 0,9q 2
d =2
[1.65]
F ( q ) = q + 0,8
G ( q ) = 0,66q − 0,56q
2
[1.66]
q ( 0,66q − 0,56 )
uk = −
y
( q + 0,5)( q + 0,8) k
[1.67]
uk = −1,3uk −1 − 0,4uk −2 − 0,66 yk + 0,56 yk −1
E { y 2 } = 1 + 0,82 = 1,64
[1.68]
[1.69]
Clase 13b Control de Mínima Varianza.doc 23
3
2
1
0
-1
-2
-3
0
10
20
30
40
50
60
70
80
90
100
Clase 13b Control de Mínima Varianza.doc 24
Ejemplo 1.8. Influencia del Retardo
A* ( q −1 ) = 1 − 1,5q −1 + 0,7q −2
B* ( q −1 ) = q − d (1 + 0,5q −1 )
[1.70]
C * ( q −1 ) = 1 − 0,2q −1 + 0,5q −2
d = 1− 3− 5
[1.71]
8
4
3
6
2
4
1
2
0
0
-1
-2
-2
-4
-6
-3
0
10
20
30
40
50
60
70
80
90
100
6
-4
0
10
20
10
20
30
40
50
60
70
80
90
100
8
6
4
4
2
2
0
0
-2
-2
-4
-4
-6
-6
0
10
20
30
40
50
60
70
80
90
100
-8
0
30
40
50
60
70
80
90
100
Clase 13b Control de Mínima Varianza.doc 25
1.4.1. Seguimiento de Referencias
La planta se escribe
yk + d = F * ( q −1 ) ek + d +
G * ( q −1 )
C (q
*
−1
)
yk +
B* ( q −1 ) F * ( q −1 )
C (q
*
−1
)
uk [1.72]
Se debe calcular la acción de control tal que minimice la varianza de la salida
E
{
( yk + d − rk + d )
2
}
{(
= E F * ( q −1 ) ek + d
)}
2
2
−1
−1
*
*
G * q −1
B
q
F
q
(
)
(
)
(
)
u
r
+ E * −1 yk +
−
k
k +d
−1
*
C
q
C
q
( )
( )
[1.73]
el único término manejable es el segundo, que debe ser cero,
uk =
1
C ( q −1 ) rk + d − G * ( q −1 ) yk
B* ( q −1 ) F * ( q −1 )
[1.74]
Clase 13b Control de Mínima Varianza.doc 26
Diagrama en Bloques
C
A
ωk
rk + d
C
+
-
1
FB′
uk
z B′
A
-d
+
+
yk
G
Relación entrada salida
yk = rk + F * ( q −1 ) ek
[1.75]
Clase 13b Control de Mínima Varianza.doc 27
1.4.2. Mínima Varianza Ponderado
Funcional a minimizar
J =E
E
{( y
{( y
− rk + d ) + λuk2
2
k +d
− rk + d ) + λu
2
k +d
2
k
}
[1.76]
} = E {( F ( q ) e ) }
[1.77]
*
2
−1
k +d
2
−1
−1
*
*
G * q −1
B (q ) F (q )
(
)
2
u
r
λ
u
+ E * −1 yk +
−
+
k
k +d
k
−1
*
C
q
C
q
( )
( )
Su mínimo está cuando
uk =
1
C ( q −1 ) rk + d − G * ( q −1 ) yk
B* ( q −1 ) F * ( q −1 ) + λ C ( q −1 )
[1.78]
Clase 13b Control de Mínima Varianza.doc 28
Diagrama en Bloques
C
A
ωk
rk + d
C
+
1
FB′ + λ C
-
uk
z B′
A
-d
+
+
yk
G
Relación entrada salida
yk =
B (q
*
B* ( q −1 )
−1
) + λ A (q )
*
−1
rk +
F * ( q −1 ) B* ( q −1 ) + λC ( q −1 )
B (q
*
−1
) + λ A (q )
*
−1
ek
[1.79]
Clase 13b Control de Mínima Varianza.doc 29
1.4.3. Expresión Vectorial del Controlador y Planta
Controlador:
uk =
1
C ( q −1 ) rk + d − G * ( q −1 ) yk
B* ( q −1 ) F * ( q −1 ) + λ C ( q −1 )
[1.80]
con lo que uk resulta,
uk =
b0
2
b0 + λ
λ
′
Cr
G
F
B
+
(C
1)
−
y
b0
k +d
k
uk
b0
[9-1]
Por lo tanto la ley de control en forma vectorial será:
T
u k = xk p
[9-2]
donde:
b0
λ
b0 g 0
b0 g n-1 b0
b0 c 1
′
… 2
… 2
, 2
, 2
p = 2
f b1 + c 1 …
+
+
+
+
+
λ
λ
λ
λ
λ
b0
b0
b0
b0
b0
b0
T
x k = [ rk + d ,rk + d −1 … - y k … - y k -n+1 , - u k -1 …]
T
[9-3]
Clase 13b Control de Mínima Varianza.doc 30
Planta:
yk + d = F * ( q −1 ) ek + d +
G * ( q −1 )
C (q
*
−1
)
yk +
B* ( q −1 ) F * ( q −1 )
C (q
*
−1
)
uk [1.81]
Predictor
yˆ k + d =
G * ( q −1 )
C (q
*
−1
)
yk +
B* ( q −1 ) F * ( q −1 )
C (q
*
−1
)
uk
[1.82]
B* ( q −1 ) F * ( q −1 ) uk = C * ( q −1 ) yˆ k + d − G * ( q −1 ) yk
[1.83]
B* ( q −1 ) F * ( q −1 ) uk + C ( q −1 ) λuk = C ( q −1 ) yˆ k + d − G * ( q −1 ) yk + C ( q −1 ) λuk
[1.84]
B* ( q −1 ) F * ( q −1 ) + λC ( q −1 ) uk = C ( q −1 ) [ yˆ k + d + λ uk ] − G * ( q −1 ) yk [1.85]
2
λ
λ
b0 + λ
′
ˆ
=
C
y
+
G
F
B
+
C
1
y
(
)
uk
uk
b0
k
k +d
uk
b0
b
b
0
0
uk =
b0
2
b0 + λ
λ
λ
′
ˆ
C
y
+
G
F
B
+
(C
1)
y
uk
b0
k +d
k
uk
b
b
0
0
[9-4]
Clase 13b Control de Mínima Varianza.doc 31
por lo tanto, la expresión de la actuación de acuerdo a la ecuación de la planta
es:
T
u k = xk p
[9-5]
donde
λ
λ
ˆ
ˆ
…
…
…
+
=
y
,
y
+
y
y
u
u
u
u
k
k -1
k -1
k -m-d+1
x k +d
k + d −1
k
k -n+1
b0
b0
b
λ
b0 g
b0 g
bc
b
T
p = 2 0 , 2 0 1 … 2 0 … 2 n-1 , 2 0 ( f ′b1 + c 1 ) …
b0
b0 + λ b0 + λ b0 + λ b0 + λ b0 + λ
T
k
[9-6]
Clase 13b Control de Mínima Varianza.doc 32
1.4.4. Interpretación como Ubicación de Polos
− B ( q ) yk C ( q )
A(q)
G q F q B q =
ek [1.86]
u
0
(
)
(
)
(
)
k
despejando la acción de control, resulta el siguiente polinomio característico
A ( q ) F ( q ) B ( q ) + G ( q ) B ( q ) = q d −1C ( q ) B ( q )
[1.87]
esto se puede interpretar como una ubicación de polos. Es decir, se elige el regulador,
uk = −
G (q)
S (q)
yk =
yk
F (q) B (q)
R (q)
[1.88]
con
S (q) = G (q), R (q) = F (q) B (q)
[1.89]
reemplazando,
q d −1C ( q ) B ( q ) = A ( q ) F ( q ) B ( q ) + G ( q ) B ( q ) == A ( q ) R ( q ) + B ( q ) S ( q )
[1.90]
Clase 13b Control de Mínima Varianza.doc 33
1.4.5. Sistemas con Inversa Inestable
Si B tiene raíces inestables, aparecerán modos inestables que no son observados desde la salida.
yk =
F (q)
ek
d −1
q
uk = −
[1.91]
G (q)
ek
d −1
q B (q)
[1.92]
Ejemplo 1.9. Cancelación de Ceros Inestables
A ( q ) = ( q − 1)( q − 0,7 ) = q 2 − 1,7 q + 0,7
B ( q ) = 0,9 q + 1
[1.93]
C ( q ) = q ( q − 0,7 ) = q 2 − 0,7q
d =1
[1.94]
F (q) = 1
G ( q ) = q − 0,7
[1.95]
-------verificar simulación ------------------Clase 13b Control de Mínima Varianza.doc 34
Teorema 1. Control de Mínima Varianza Generalizado
Sea el sistema
A ( q ) yk = B ( q ) uk + C ( q ) ek [1.96]
con
B (q) = B+ ( q) B− ( q)
[1.97]
todos los ceros de B + ( q ) están dentro del círculo unidad
todos los ceros de B − ( q ) están fuera del círculo unidad
todos los ceros de C ( q ) están fuera del círculo unidad
A ( q ) y B − ( q ) no tienen raíces comunes.
Entonces, el control de mínima varianza sigue la ley
uk = −
G (q)
yk
+
B (q) F (q)
[1.98]
siendo,
q d −1C ( q ) = A ( q ) F ( q ) + B − ( q ) G ( q )
[1.99]
Clase 13b Control de Mínima Varianza.doc 35
con
grado ( F ) = d + grado ( B − ) − 1
grado ( G ) < grado ( A) = n
[1.100]
- Demostración
Sea el operador
1
q+a
a > 1 [1.101]
Clase 13b Control de Mínima Varianza.doc 36
1.5. Regulador Lineal Óptimo Estocástico (LQG)
Proceso
xk +1 = Φ xk + Γuk + Kek
yk = Cxk + ek
[1.102]
el grado de C es igual al grado de A
− a1
−a
2
Φ=
−a
n −1
− an
1 0
0 1
0 0
0 0
0
b1
c1 − a1
b
c −a
0
2
2
2
Γ= k=
C = [1 0
b
c − a
1
n −1
n −1 n −1
0
bn
cn − an
0]
[1.103]
el filtro de Kalman resulta
xˆk +1/ k = Φ xˆk / k −1 + Γuk + K ( yk − Cxˆk / k −1 )
[1.104]
el polinomio característico es
det ( zI − ( Φ − KC ) ) = C ( z )
[1.105]
Si el retardo es uno, la ley de control es
Clase 13b Control de Mínima Varianza.doc 37
uk = − Lxˆk / k −1
[1.106]
y la función de transferencia del regulador es
H r ( z ) = − L ( zI − Φ + KC + ΓL ) = −
−1
S (z)
R(z)
[1.107]
donde
R ( z ) = det ( zI − Φ + KC + ΓL )
[1.108]
el grado de R es n y el grado de S<n
los polos en lazo cerrado son los de C
P ( z ) = det ( zI − Φ + ΓL ) = C ( z )
[1.109]
P se obtiene de la ecuación de Ricatti.
Se tratará de dejar la ley de control en función de la salida en lugar del estado
La ecuación a minimizar es
J lqr = E { yk2 + ρ uk2 }
[1.110]
es el mismo caso de variables de estado en donde
Q1 = C T C Q12 = 0 Q2 = ρ
[1.111]
Clase 13b Control de Mínima Varianza.doc 38
haciendo igual cálculo se llega a que
L = Lv Φ
[1.112]
la ley de control en variables de estados es
uk = − Lxˆk / k − Lv vˆk / k = − Lxˆk / k − Lv K ( yk − Cxˆk / k −1 )
= − Lv ( Φ − KC ) xˆk / k −1 − Lv Kyk
[1.113]
reemplazando el observador
uk = − Lv ( Φ − KC )( qI − Φ + KC )
−1
( Γuk + Kyk ) − Lv Kyk
= − Lv ( Φ − KC )( qI − Φ + KC ) Γuk
−1
− Lv ( Φ − KC + qI + Φ + KC )( qI − Φ + KC ) Kyk
−1
[1.114]
= − Lv ( Φ − KC )( qI − Φ + KC ) Γuk
−1
− Lv ( qI − Φ + KC ) Kyk
−1
haciendo
R2 = det ( qI − Φ + KC )
[1.115]
se obtiene
Clase 13b Control de Mínima Varianza.doc 39
R1 ( q )
S (q)
uk = −
uk −
yk
R2 ( q )
R2 ( q )
[1.116]
donde
grado ( R2 ) < n
grado ( R1 ) = grado ( S ) = n
[1.117]
S (0) = 0
con lo que queda
uk = −
S (q)
S (q)
yk = −
yk
R1 ( q ) + R2 ( q )
R (q)
[1.118]
Clase 13b Control de Mínima Varianza.doc 40
1.5.1. Factorización Espectral
de lo visto en variables de estado, el polinomio característico P en lazo cerrado,
es
rP ( z ) P ( z −1 ) = ρ A ( z ) A ( z −1 ) + B ( z ) B ( z −1 )
[1.119]
Otra forma de verlo, es encontrar un polinomio P que cumpla con esta ecuación.
Esto se llama factorización espectral.
Sea
F ( z ) = f 0 z 2 n + f1 z 2 n −1 +
+ f n −1 z n +1 + f n z n + f n −1 z n −1 +
+ f1 z + f 0 [1.120]
este polinomio coincide con su recíproco
F ( z ) = z 2 n F ( z −1 ) = F ( z )
[1.121]
si a es raíz de F ( z ) , también 1 es raíz.
a
Además, si los coeficientes de F son reales, los conjugados a y 1
raíces.
a
también son
Clase 13b Control de Mínima Varianza.doc 41
Teorema 2. Se cumple que, si
A y B son primos,
grado de A mayor al grado de B,
grado de P = grado A = n
Existe un único P con sus raíces dentro o sobre el círculo unidad, y si ρ > 0 , P
no tiene raíces sobre el círculo unidad.
- Demostración:
Multiplicando la ecuación [1.119] por z n
z n P ( z ) P ( z −1 ) = p0 z 2 n + p1 z 2 n −1 +
+ pn −1 z n +1 + pn z n + pn −1 z n −1 +
+ p1 z + p0
[1.122]
queda de la forma de F.
Por lo tanto el lado derecho de la ecuación [1.119] tiene raíces espejadas.
Tampoco puede tenerlas sobre el círculo unidad ya que, para z = e jω
ρ A(e
jω
) A(e ) + B (e ) B (e ) = ρ A(e )
− jω
jω
− jω
jω
2
+ B (e
jω
)
2
=0
[1.123]
como ρ > 0 , implica que z = e jω es raíz de A y de B, pero estos son primos.
La condición de que el grado de P sea n, asegura la unicidad de P.
Clase 13b Control de Mínima Varianza.doc 42
Nota 1: si se introduce el recíproco P* ( z ) = z n P ( z −1 ) resulta
rP ( z ) P* ( z ) = ρ A ( z ) A* ( z ) + B ( z ) B* ( z )
[1.124]
Nota 2: si P satisface la ecuación [1.119] entonces z l P ( z )
Clase 13b Control de Mínima Varianza.doc 43
1.5.2. Discusión Heurística
En el problema de ubicación de polos se debe definir el polinomio característico
en lazo cerrado Ac ( z ) Ao ( z ) donde Ao ( z ) .
En el problema LQG Ao ( z ) = C ( z ) y el polinomio Ac ( z ) = P ( z ) que se obtiene por
factorización espectral.
Se puede pensar en la ubicación de polos con estas condiciones de diseño, resultando el control óptimo:
uk = −
S (q)
yk
R (q)
[1.125]
con
A( z ) R ( z ) + B ( z ) S ( z ) = P ( z )C ( z )
[1.126]
Hay muchos polinomios que satisfacen esta ecuación.
Si hay retardo es mejor calcular la siguiente ecuación:
A* ( z ) R* ( z ) + z d B* ( z ) S * ( z ) = P* ( z ) C * ( z )
d = grado ( A ( z ) ) − grado ( B ( z ) )
[1.127]
[1.128]
Clase 13b Control de Mínima Varianza.doc 44
1.5.3. Demostración Formal
Teorema 3. Control LQG
Sea
P ( z ) el polinomio calculado por factorización espectral,
A ( z ) mónico
A ( z ) y B ( z ) no tienen raíces comunes fuera del o sobre el círculo unidad.
Entonces existe una única solución a las ecuaciones
A* ( z ) X ( z ) + rP ( z ) S * ( z ) = B ( z ) C * ( z )
z B ( z ) X ( z ) − rP ( z ) R ( z ) = − ρ A ( z ) C ( z )
d
*
*
*
[1.129]
con
grado ( X ( z ) ) < n
grado ( R* ( z ) ) ≤ n
[1.130]
grado ( S * ( z ) ) < n = grado ( A ( z ) )
Clase 13b Control de Mínima Varianza.doc 45
- Demostración
Primero se supone que P ( z ) tiene raíces distintas zi , como es estable todas las
raíces serán zi < 1
Por hipótesis, los polinomios A y B no se pueden hacer cero simultaneamente.
Evaluando [1.129] en z = zi
A* ( zi ) X ( zi ) = B ( zi ) C * ( zi )
zi B ( zi ) X ( zi ) = − ρ A ( zi ) C ( zi )
d
*
*
[1.131]
si A y B son distintos de cero se puede hacer
B ( zi )
ρ A ( zi )
=− d *
A* ( zi )
zi B ( zi )
[1.132]
si A* ( zi ) = 0 y B* ( zi ) ≠ 0 , de[1.124] resulta B ( zi ) = 0 . Como A es mónico se
cumple A* ( 0 ) = 1. Esto implica zi ≠ 0 .
Se puede despejar X de la ecuación
A* ( zi ) X ( zi ) = B ( zi ) C * ( zi )
[1.133]
Clase 13b Control de Mínima Varianza.doc 46
X ( zi ) = −
ρ A ( zi ) C * ( zi )
zi B ( zi )
d
*
[1.134]
Clase 13b Control de Mínima Varianza.doc 47
1.6. Referencias
Goodwin, G. Sin: Adaptive Filtering, Prediction and Control, Prentice Hall –
1984.
Clase 13b Control de Mínima Varianza.doc 48