problemas 5-6-7-8
Anuncio

PROBLEMA 5: ROBOT CARTESIANO
(10, 220 )
2m
(200, 100 )
1m
(-190, 20 )
(0, 0 )
2m
(10, 20 )
(210, 20 )
1m
1m
2m
1m
2m
(10, -180 )
Las unidades son en cm.
Y las formulas utilizadas son:
𝑦 = 𝑎𝑥 + 𝑏
𝑦1 − 𝑦0
𝑥1 − 𝑥0
{
𝑏 = 𝑦0 − 𝑎𝑥0
𝑎=
PRIMER MOVIMIENTO:
Sin aplicar el laser se describirá un movimiento recto desde el punto inicial donde se encuentra el brazo del
robot (x0, y0) = (200, 100), hasta el punto final (x1, y1) = (210, 20)
𝑎=
𝑦1 − 𝑦0
20 − 100
−80
=
=
= −8
𝑥1 − 𝑥0 210 − 200
10
𝑏 = 𝑦0− 𝑎𝑥0 = 100— 8 × 200 = 1700
𝑦 = −8𝑥 + 1700
𝑥=
−𝑦 + 1700
8
𝒚 = −𝟖𝒙(𝟐𝟎𝟎 + 𝟎, 𝟏𝒊) + 𝟏𝟕𝟎𝟎
𝒙=
(−𝟏𝟎𝟎 + 𝟎, 𝟏𝒋) + 𝟏𝟕𝟎𝟎
𝟖
Iniciar el incremento de i en 0 (i=0). Se incrementara en 1 cada paso
Repetir la operación 100 veces.
Iniciar el incremento de j en 0 (j=0). Se incrementara en 1 cada paso
Repetir la operación 800 veces.
SEGUNDO MOVIMIENTO:
Aplicando el laser se describirá un movimiento circular. Esta parte consta de dos fases:
1ª FASE: Corresponde al corte circular en el primer y segundo cuadrante de la circunferencia.
Punto de inicio (x0, y0) = (210, 20),
Punto final (x1, y1) = (-190, 20)
Las ecuación del movimiento que corresponde a esta circunferencia cuyo centro es O = (10, 20), y cuyo radio
mide 200 cm. Son:
(x1-x0) 2+(y1-y0)=r2
(x1 -10) 2+(y1-20)=2002
𝑦 = √40000 − (𝑥1 − 10)2 +20
𝑦 = √40000 − (210 − 10)2 +20
𝒚 = + √𝟒𝟎𝟎𝟎𝟎 − (𝟐𝟎𝟎 − 𝟎. 𝟏𝒊)𝟐 + 𝟐𝟎
𝒙 = 𝟐𝟏𝟎 − 𝟎, 𝟏𝒋
Iniciar el incremento de i en 0 (i=0). Se incrementara en
1 cada paso
Repetir la operación 4000 veces.
Iniciar el incremento de j en 0 (j=0). Se incrementara en
1 cada paso
Repetir la operación 4000 veces.
2ª FASE: Corresponde al corte circular en el tercer y cuarto cuadrante.
Punto de inicio (x0, y0) = (-190, 20),
Punto final (x1, y1) = (210, 20)
𝑦 = −√40000 − (𝑥1 − 10)2 +20
𝑦 = −√40000 − (−190 − 10)2 +20
𝒚 = − √𝟒𝟎𝟎𝟎𝟎 − (−𝟐𝟎𝟎 + 𝟎. 𝟏𝒊)𝟐 + 𝟐𝟎
𝒙 = −𝟏𝟗𝟎 + 𝟎, 𝟏𝒋
Iniciar el incremento de i en 0 (i=0). Se incrementara en
1 cada paso
Repetir la operación 4000 veces.
Iniciar el incremento de j en 0 (j=0). Se incrementara en
1 cada paso
Repetir la operación 4000 veces.
PROBLEMA 6: ROBOT CARTESIANO
(0, 1.5 )
1
LA
DO
DO
LA
2
(2, 1 )
(0, 1.5 )
(-1, 0 )
4
LA
DO
DO
LA
3
(1, 0 )
(0, -1.5 )
Las unidades son en m.
Llas formulas utilizadas son:
𝑦 = 𝑎𝑥 + 𝑏
𝑦1 − 𝑦0
𝑥1 − 𝑥0
{
𝑏 = 𝑦0 − 𝑎𝑥0
𝑎=
PRIMER MOVIMIENTO:
Sin aplicar el laser se describirá un movimiento recto desde el punto inicial donde se encuentra el brazo del
robot (x0, y0) = (2, 1), hasta el punto final (x1, y1) = (1, 0).
𝑎=
0−1
=1
1−2
𝑏 = 1 − (1 × 2) = −1
𝑦 =𝑥−1
𝑦 = (2 − 0,001𝑖) − 1
𝑥 = (1 − 0,001𝑗) + 1
𝒚 = 𝟏 − 𝟎, 𝟎𝟎𝟏𝒊
𝒙 = 𝟐 − 𝟎, 𝟎𝟎𝟏𝒋
Iniciar el incremento de i en 0 (i=0). Se incrementara en 1 cada paso
Repetir la operación 1000 veces.
Iniciar el incremento de j en 0 (j=0). Se incrementara en 1 cada paso
Repetir la operación 1000 veces.
SEGINDO MOVIMIENTO:
Aplicando el laser se describirán movimientos rectilíneos. Esta parte consta de cuatro fases que corresponden
a los cuatro lados del rombo que se desea cortar:
1ª LADO:
Punto inicial →(x0, y0) = (2, 1).
Punto final → (x1, y1) = (1, 0).
𝑎=
1,5 − 0
= −1,5
0−1
𝑏 = 0 + 1,5 × 1 = 1,5
𝑦 = −1,5𝑥 + 1,5
𝒚 = −𝟏, 𝟓(𝟏 − 𝟎, 𝟎𝟎𝟏𝒊) + 𝟏, 𝟓
𝒙=
𝟏, 𝟓 − 𝟎, 𝟎𝟎𝟏𝟓𝒋
𝟏, 𝟓
Iniciar el incremento de i en 0 (i=0). Se incrementara en 1 cada paso
Repetir la operación 1000 veces.
Iniciar el incremento de j en 0 (j=0). Se incrementara en 1 cada paso
Repetir la operación 1000 veces.
2ª LADO:
Punto inicial →(x0, y0) = (0, 1.5).
Punto final → (x1, y1) = (-1, 0).
𝑎=
0 − 1,5
= 1,5
−1 − 0
𝑏 = 1,5 − 1,5 × 0 = 1,5
𝑦 = 1,5𝑥 + 1,5
𝒚 = 𝟏, 𝟓(−𝟎, 𝟎𝟎𝟏𝒊) + 𝟏, 𝟓
𝒙=
−𝟎, 𝟎𝟎𝟏𝟓𝒋
𝟏, 𝟓
3ª LADO:
Punto inicial →(x0, y0) = (-1, 0).
Punto final → (x1, y1) = (0, -1.5).
Iniciar el incremento de i en 0 (i=0). Se incrementara en 1 cada paso
Repetir la operación 1000 veces.
Iniciar el incremento de j en 0 (j=0). Se incrementara en 1 cada paso
Repetir la operación 1000 veces.
𝑎=
−1,5 − 0
= 1,5
0−1
𝑏 = 0 − 1,5 × (−1) = 1,5
𝑦 = 1,5𝑥 + 1,5
Iniciar el incremento de i en 0 (i=0). Se incrementara en 1 cada paso
Repetir la operación 1000 veces.
𝒚 = 𝟏, 𝟓(−𝟏 + 𝟎, 𝟎𝟎𝟏𝒊) + 𝟏, 𝟓
𝟎, 𝟎𝟎𝟏𝟓𝒋 − 𝟏, 𝟓
𝒙=
𝟏, 𝟓
Iniciar el incremento de j en 0 (j=0). Se incrementara en 1 cada paso
Repetir la operación 1000 veces.
4ª LADO:
Punto inicial →(x0, y0) = (0, -1,5).
Punto final → (x1, y1) = (1, 0).
𝑎=
0 + 1,5
= 1,5
1−0
𝑏 = −1,5 − 1,5 × 0 = −1,5
𝑦 = 1,5𝑥 − 1,5
Iniciar el incremento de i en 0 (i=0). Se incrementara en 1 cada paso
Repetir la operación 1000 veces.
𝒚 = 𝟏, 𝟓(𝟎, 𝟎𝟎𝟏𝒊) − 𝟏, 𝟓
𝟎, 𝟎𝟎𝟏𝟓𝒋
𝒙=
𝟏, 𝟓
Iniciar el incremento de j en 0 (j=0). Se incrementara en 1 cada paso
Repetir la operación 1000 veces.
PROBLEMA 7: ROBOT CARTESIANO
(1, 3, 4 )
(2, 1, 3 )
Las unidades son en m.
Se trata de desplazar el brazo del robot desde un punto inicial A, a un punto final B.
Calcularemos el vector director (B-A).
𝐴 → (𝑥0 , 𝑦0 . 𝑧0 ) = (2, 1, 3)
𝐵 → (𝑥1 , 𝑦1 . 𝑧1 ) = (1, 3, 4)
⃗⃗⃗⃗⃗ = (−1, 2, 1)
𝐴𝐵
(𝑥, 𝑦, 𝑧) = (2, 1, 3) + 𝑡(−1, 2, 1)
𝑥 =2−𝑡
𝑦 = 1 + 2𝑡
𝑧 = 3 + 1𝑡
𝒙 = 𝟐 − (𝟎, 𝟎𝟎𝟏𝒊)
𝒚 = 𝟏 + 𝟐(𝟎, 𝟎𝟎𝟏𝒋)
𝒛 = 𝟑 + 𝟎, 𝟎𝟎𝟏𝒌
Iniciar el incremento de i en 0 (i=0). Se incrementara en 1 cada paso
Repetir la operación 1000 veces.
Iniciar el incremento de j en 0 (j=0). Se incrementara en 1 cada paso
Repetir la operación 1000 veces.
Iniciar el incremento de k en 0 (k=0). Se incrementara en 1 cada paso
Repetir la operación 1000 veces.
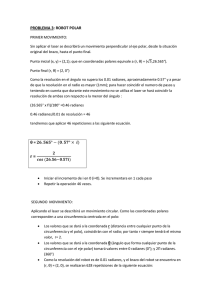
PROBLEMA 8: ROBOT ESFÉRICO
Para pasar de coordenadas cartesianas a cilíndricas, hemos utilizado:
𝝆 = √𝒙𝟐 + 𝒚𝟐 + 𝒛𝟐
𝒚
𝜽 = 𝒂𝒓𝒄𝒕𝒈 ( )
𝒙
𝒛
𝒛
𝝋 = 𝒂𝒓𝒄 𝒄𝒐𝒔 ( ) → 𝒂𝒓𝒄 𝒄𝒐𝒔 (
)
𝝆
√𝒙𝟐 + 𝒚𝟐 + 𝒛𝟐
𝜌 → 𝐷𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝑑𝑒𝑙 𝑝𝑢𝑛𝑡𝑜 𝑃 𝑎𝑙 𝑜𝑟𝑖𝑔𝑒𝑛 𝑑𝑒 𝑐𝑜𝑜𝑟𝑑𝑒𝑛𝑎𝑑𝑎𝑠.
𝜃 → 𝐴𝑛𝑔𝑢𝑙𝑜 𝑞𝑢𝑒 𝑠𝑒 𝑜𝑏𝑡𝑖𝑒𝑛𝑒 𝑎𝑙 𝑝𝑟𝑜𝑦𝑒𝑐𝑡𝑎𝑟 𝑒𝑙 𝑠𝑒𝑔𝑚𝑒𝑛𝑡𝑜 𝑂𝑃 𝑠𝑜𝑏𝑟𝑒 𝑋𝑌.
𝜑 → 𝐴𝑛𝑔𝑢𝑙𝑜 𝑞𝑢𝑒 𝑓𝑜𝑟𝑚𝑎 𝑒𝑙 𝑠𝑒𝑔𝑚𝑒𝑛𝑡𝑜 𝑂𝑃 𝑐𝑜𝑛 𝑒𝑙 𝑒𝑗𝑒 𝑍.
𝐴 → (𝑥0 , 𝑦0 . 𝑧0 ) = (2, 1, 3)
𝐴 → (𝜌0 , 𝜃0 . 𝜑0 ) = (√14, 26.56°, 36.7°)
𝐵 → (𝑥1 , 𝑦1 . 𝑧1 ) = (1, 3, 4)
𝐵 → (𝜌1 , 𝜃1 . 𝜑1 ) = (√26, 71.56°, 38.33°)
𝜌1 − 𝜌0 = √26 − √14 = 1,357𝑚 → 1357𝑚𝑚
𝜃1 − 𝜃0 = 71,56° − 26,56° = 45°
𝜑1 − 𝜑0 = 38,33° − 36,7° = 1,63°