estudio de un servomecanismo dc
Anuncio

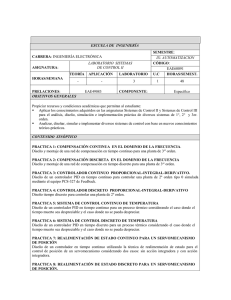
DEPARTAMENTO DE AUTOMATIZACION Y CONTROL INDUSTRIAL PRACTICAS DE CONTROL AUTOMATICO Pag. 1 ESTUDIO DE UN SERVOMECANISMO DC 1 OBJETIVOS - Estudiar las características en lazo abierto y lazo cerrado del servomecanismo DC denominado MOTOMATIC. - Identificar las señales que posee este prototipo de servomecanismo DC para su control e implementar control de velocidad y control de posición. 2 FUNDAMENTO TEORICO 2.1 DESCRIPCION DEL SERVOMECANISMO MOTOMATIC El servomecanismo MOTOMATIC consiste básicamente de los siguientes elementos: 1. Chasis 2. Riel: Para montaje de los componentes electromecánicos, e.g., motor-generador, reductor de velocidad, carga inercial y potenciómetro de posición. 3. Sistema motor-generador DC con un eje común. 4. Unidad reductora de velocidad. 5. Disco para la aplicación de perturbaciones de carga. 6. Potenciómetro para realimentación de posición. 7. Chasis de medición con tacómetro, voltímetro y amperímetro. 8. Acoplamientos mecánicos. 9. Redes RC para compensación en cascada y paralelo. El diagrama de bloques del servomecanismo se muestra en la figura 1. En donde el amplificador lineal permite conectar redes de compensación en cascada o en paralelo. El amplificador de potencia presenta una ganancia aproximada de 5 V/V y usa transistores de silicio en configuración complementaria, permitiendo así la inversión de giro del motor. DEPARTAMENTO DE AUTOMATIZACION Y CONTROL INDUSTRIAL PRACTICAS DE CONTROL AUTOMATICO Pag. 2 Figura 1. Diagrama de bloques del MOTOMATIC Existe también un sistema de indicación de sobrecarga y protección de los componentes. La máxima corriente de salida es 2.25 A, el indicador de sobrecarga se activa cuando la corriente excede 1.5 A (e.g., al arrancar el motor). Existen tres fuentes: 30 V para la etapa de potencia, 21 para entrada de referencia paso, y 15 v para la etapa electrónica. Un taco-generador y un potenciómetro lineal permiten realimentar las señales de velocidad y posición, respectivamente. Se dispone de un sistema de reducción de velocidad (i.e., amplificación de torque) que utiliza bandas de transmisión. !! Precauciones: A fin de evitar daños en el instrumento, debe observarse lo siguiente: 1. No conectar señales externas directamente al amplificador operacional, sino, a través de las resistencias del sumador. 2. No usar el sistema de bandas de transmisión como amplificador de velocidad, sino, siempre como reductor de velocidad. 3. Cuando no se utiliza realimentación de posición, es conveniente desacoplar el potenciómetro del eje del motor para no desgastar innecesariamente el potenciómetro. La realimentación de posición y velocidad deben ser negativas para evitar que el sistema sea inestable. En caso de inestabilidad, la velocidad del motor puede llegar a valores que pueden dañar permanentemente los componentes del servomecanismo. Pag. 3 DEPARTAMENTO DE AUTOMATIZACION Y CONTROL INDUSTRIAL PRACTICAS DE CONTROL AUTOMATICO 2.2 CONTROL DE VELOCIDAD Y POSICION DEL MOTOMATIC Considere el diagrama de bloques en la figura 2. Este diagrama presenta el modelo simplificado de un servomecanismo de posición. Los parámetros K, T1, T2, dependen de las características del motor DC (e.g., resistencia e inductancia de armadura, constante e torque, inercia del rotor, etc.), de igual forma Kg, Kp dependen de las características de los sensores de velocidad y posición. Figura 2. Diagrama de bloques de un servomecanismo Asumiendo que se han determinado los parámetros del servosistema. Donde: K1 = K2 = 10, Kg = 0.1 V/rad/s, 1 = 1600 s-1 , T1 Kp = 5 V/rad, N = 1/9 1 = 12 s-1 T2 La posición de los interruptores SW1 y SW2 determinan el modo de trabajo del sistema, como se indica en la tabla 1. SW1 SW2 Modo de Operación Abierto Abierto Lazo abierto Abierto Cerrado Control de posición Cerrado Abierto Control de velocidad Cerrado Cerrado Control de posición con realimentación secundaria de velocidad Tabla I. Modos de funcionamiento del servomecanismo DEPARTAMENTO DE AUTOMATIZACION Y CONTROL INDUSTRIAL PRACTICAS DE CONTROL AUTOMATICO Pag. 4 3 BIBLIOGRAFIA - Electro-Craf Corporation, Motomatic Control System Laboratory, 1978. - Ogata K., Ingeniería de Control Moderna, Prentice Hall, Tercera edición,1999. - Kuo B., Sistemas de Automáticos de Control, Prentice Hall, Séptima edición, 1997. - Dorf R., Modern Control Systems, 8th edition, Addison Wesley, 1998.