Vibrations and Time Response
(Meriam & Kraige,
Chapter 8,p 601 – 633)
Applied Mechanics 2A
Introduction
Rigid body
Linear and angular motion
Oscillates
Responds to applied disturbances
Structures to earthquakes
Vibrations of unbalanced rotating machinery etc.
Simplified model very accurate some
protions of a continuous system are massive
in comparison with other portions
1-D vibrations for this chapter
Applied Mechanics 2A
Free vibrations of particles
• Spring mounted body
disturbed from equilibrium
position
absence of imposed external
forces = free vibration
• Retarding forces excluded for
example friction
Applied Mechanics 2A
Equations of motion for un-damped
free vibrations
• Consider a frictionless massspring system
x displacement from
equilibrium condition
-kx restoring force on mass
• From Newton’s second law:
..
kx m x
..
m x kx 0
Applied Mechanics 2A
Equations of motion for un-damped
free vibrations
• Oscillation of a mass to a
linear restoring force
simple harmonic motion
• Generally expressed as
follows:
..
x n2 x 0
n
k
m
Applied Mechanics 2A
Solution for un-damped free
vibrations
x A cos n t B sin n t or x C sin n t
A, B constants
nt Phase Angle
C Amplitude
Phase constant
n Natural frequency
Applied Mechanics 2A
Solution for un-damped free
vibrations
x0 C sin
.
x 0 n C cos
At time t = 0s
Initial displacement = x0
Initial velocity = dx0/dt
thus
n x0
arctan .
x
0
x0
2
C x0
n
.
Applied Mechanics 2A
2
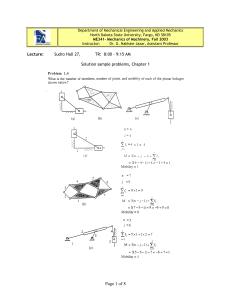
Graphical representation of motion
• Motion graphically x is seen to be the
projection onto a vertical axis of a rotating vector
of length C
• Vector rotates at constant angular velocity n
• Number of complete cycles per unit time = natural
frequency fn = n/2
• f hertz (Hz)
• Time to complete one motion cycle = Period =
1/ fn = 2/n
Applied Mechanics 2A
Graphical representation of motion
Applied Mechanics 2A
Graphical representation of motion
Significance of the phase angle
A A cost
can be expressed as follows
1 cost
time required to move t 0; 2n; n 0,1,2.....
from zero to first maximum
t
amplitude
m
m
m
m
Applied Mechanics 2A
Graphical representation of motion
If we started the oscillator at its
maximum positive
displacement
x A cos
Applied Mechanics 2A
t
Velocity and acceleration of a simple
harmonic motion
x A cost
dx
v
A sin t A cos t
dt
2
dv
2
a
A cost
dt
Applied Mechanics 2A
Damped Free vibrations
• Every system possesses a
degree of friction
dissipates mechanical enegy
viscous damper intentionally
added to a system to limit
vibration
• Constant of proportionality c
viscous damping
coefficient N.s/m
• Damping force is directed as
to oppose the velocity
Applied Mechanics 2A
Damped Free vibrations
.
..
..
.
kx c x m x or m x kx c x 0
n
k
c
;
viscous damping factor(zet a)
m
2 m n
..
.
x 2n x n2 x 0
Applied Mechanics 2A
Solution for damped free vibrations
Assume the solution has the form x = Aet
Substitute in equation and solve quadratic equation
..
.
x 2n x n2 x 0;
1, 2 n 2 1
Property of superposit ion of linear system
x A1e 1t A2 e 2t
Applied Mechanics 2A
Categories of damped motion
• Because lies between 0 and and the radicand
(2 -1) may be positive, negative or zero 3
categories of damped motion
– > 1 over damped Roots 1 & 2 distinct,
real, negative numbers
– Motion decays x approaches zero for large values
of time
Applied Mechanics 2A
Categories of damped motion
• Because lies between 0 and and the radicand
(2 -1) may be positive, negative or zero 3
categories of damped motion
– = 1 critically damped Roots 1 & 2 equal,
real, negative numbers = -n
x A1 A2 e
Applied Mechanics 2A
nt
Categories of damped motion
• Because lies between 0 and and the radicand
(2 -1) may be positive, negative or zero 3
categories of damped motion
– < 1 radicand (2 -1) < 0
x A1e i 1 n t A2 e i 1 n t e n t
2
2
d n 1 2 (damped natural frequency)
e ix cos x i sin x
x A3 cos d t A4 sin d t e n t
A3 A1 A2 ; A4 A1 A2
x Ce nt sin d t
2
d Applied
(damped2Aperiod)
Mechanics
d
Forced vibrations of particles
• Motion excited by disturbing force
• Force internally or externally generated
• May be caused by motion of the foundation of
the system
Applied Mechanics 2A
Harmonic Excitation
• Consider a body excited by an external force
F = F0 sin t; F0 = force amplitude & = driving
frequency
• Don’t mix up the two frequencies
..
kx cx F0 sin t m x
F0 sin t
x 2n x x
m
..
.
2
n
Applied Mechanics 2A
Un-damped Forced Vibration
Damping negligible c=0
F0 sin t
x x
m
..
2
n
Solution = sum of complementary and particular
solution
xc A cos n t B sin n t C sin n t
x p X sin t
Applied Mechanics 2A
Un-damped Forced Vibration
Substituting xp & derivatives
F0
k
X
2
1
n
• Complementary (transient) Solution dies out
with time & is of no interest
• Particular (steady state) solution continuos
motion with period = 2/
Applied Mechanics 2A
Un-damped Forced Vibration
• Amplitude of importance
• Assume a static force F0 cause static
spring deflection st F0 = kst
• Amplitude ratio or magnification
factor M measure severity of
vibration
• Define M ratio of forcing
amplitude to static deflection
• Approaches infinity if approaches
n
Applied Mechanics 2A
M
X
st
1
1
n
2
Un-damped Forced Vibration
• Value of n resonant or critical
frequency of system
• If is close to n resulting in
large displacement amplitude
resonance Tacoma bridge
• If <n M positive & vibration
in phase with force F
• If >n M negative & vibration
180 degrees out of phase with force
F
Applied Mechanics 2A
Damped Forced Vibration
F0 sin t
x 2n x x
m
..
.
2
n
• Solution = sum of complementary and particular
solution
• Complementary solution presented for over
damped, under damped and critically damped
• Particular solution = any solution to complete
equation
x p X 1cos t X 2 sin t X sin t
Applied Mechanics 2A
Damped Forced Vibration
Substituting xp & derivatives
X
F0
k
2
2 2
1
n n
2
2
n
arctan
2
1
2A n
Applied Mechanics
Damped Forced Vibration
Complete solution for a damped system
x Ce
n t
sin d t X sin t
• First term to right side diminishes with time
transient solution
• Particular solution of interest steady state
solution
Applied Mechanics 2A
 0
0