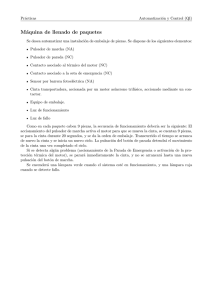
Práctica#6: Diseñar la lógica de control para el arranque de una cinta transportadora en modo manual (I0.1) y automático (I0.0);
adicionalmente contará con protección contra sobrecarga y falla de retorno de funcionamiento del contactor principal de Motor,
también se almacenará en memoria la cantidad de cajas detectadas por el final de carrera.
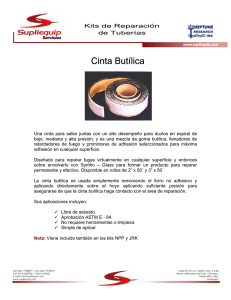
(I0.0)
(I0.1)
(I0.2)
(I0.5)
(I0.3)
(I0.4)
(I0.0) - Auto
(I0.1) - Manual
(I0.2) – Pulsador Marcha
(I0.7)
(I0.3) – Pulsador de Paro
(I0.4) – Detector de Caja
(I0.5) – Fin de Transporte
(Q0.0)
(I0.6) – Activación de Sobrecarga
(I0.7) – Feedback Contactor
(I0.6)
(Q0.0) – Cinta (Contactor)
(Q0.1) – Modo Automático (Luz Naranja)
(Q0.2) – Sistema Funcionando (Luz Verde)
(Q0.3) – Alarma de sobrecarga (Luz Roja)
Modo Manual (I0.1): En modo de control manual (I0.1) podemos arrancar la cinta (Q0.0) por medio de los pulsadores de marcha
(PM) y paro (PP), a nuestro requerimiento.
Modo Automático (I0.0): Arranca la cinta por medio del sensor capacitivo (I0.4) y se detiene con el final de carrera (I0.5)
Feedback (I0.7): en todos los casos de arranque del contactor de la cinta transportadora debemos de confirmar por medio de un
contacto auxiliar si el contactor está en funcionamiento (I0.6), caso contrario de no recibir confirmación luego de 3 segundos se
detiene la cinta de transporte y se activa una alarma intermitente (Q0.3).
Sobrecarga (I0.6) si se detecta una alarma de sobre esfuerzo, se deberá también activar (Q0.3) de forma intermitente.
Dos consideraciones, en todos los casos de aparición de alarma la misma puede ser desactivada por medio de la memoria M0.0,
la forma de acceder a este parámetro será utilizando el Web Werver del S7-1200. También utilizaremos la memoria MW1 para
realizar un contaje de cajas por medio del final de carrera (I0.5), si se requiere un reseteo del contador podemos utilizar la memoria
M0.1
Página 1|2
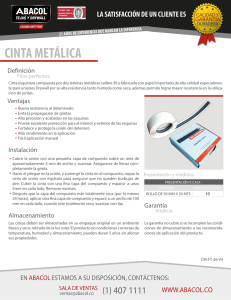
Solución planteada del cableado:
Página 2|2
 0
0