2020-1")
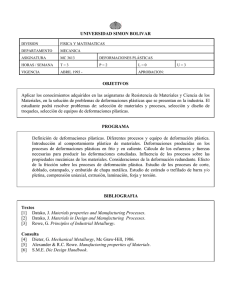
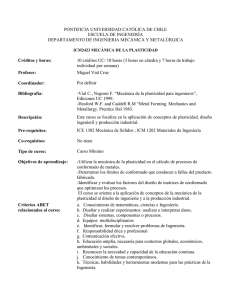
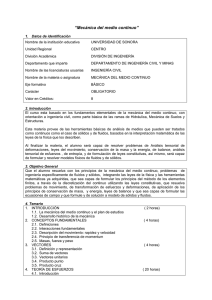
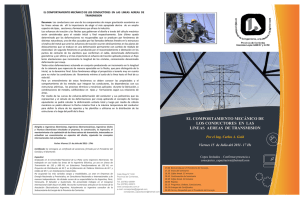
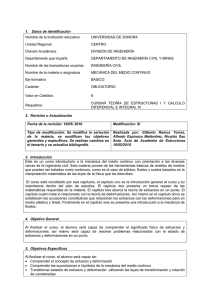
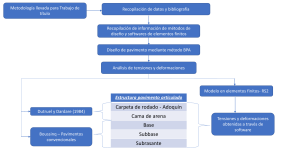
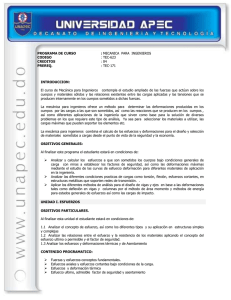
Mecánica Avanzada CAPITULO 2: Teoría de Esfuerzos y Deformaciones Escuela de Posgrado PUCP Transformación de Deformación Unitaria Plana El estado de deformación plana es aquél en el que las deformaciones del material tienen lugar dentro de planos paralelos y son las mismas en cada uno de esos planos. Si se escoge al eje “z” perpendicular a los planos en los que la deformación tiene lugar, entonces zz = zx = zy = 0, quedando como únicas componentes de la deformación a xx , yy , xy. Esta situación ocurre en una barra de longitud infinita sometida en sus lados a cargas uniformemente distribuidas a lo largo de sus bordes y que está impedida para expandirse o contraerse lateralmente, mediante soportes fijos, rígidos y lisos (ver figura 2.33). Figura 2.33. Segmentos de líneas, después de una deformación Analicemos un elemento cuadrado centrado en el punto Q, con lados de longitud s paralelos a los ejes x-y (ver figura 2.34). Al deformarse, el cuadrado se vuelve un paralelogramo, con lados de longitud s (1 + xx) y s (1 + yy), y formando ángulos de (/2 - xy ) y (/2 + xy ) entre sí (ver figura 2.34). El propósito buscado es determinar las componentes de deformación asociadas a unos ejes x´-y´ los que forman un ángulo con los ejes x-y respectivamente, es decir, se busca expresar x´x´ , y´y´ , x´y´ en función de las componentes xx , yy , xy y el ángulo (figura 2.35). Figura 2.34. Elemento diferencial antes y después de la deformación Profesor: José Acero Martínez 123 Mecánica Avanzada CAPITULO 2: Teoría de Esfuerzos y Deformaciones Escuela de Posgrado PUCP Figura 2.35. Elemento diferencial antes y después de la deformación Para esto, se trabaja con un triángulo ABC de lados x, y, s inicialmente con ángulo recto en C (figura 2.36); el lado AC es paralelo al eje x y el lado BC es paralelo al eje y. Al deformarse el triángulo pasa a la posición A´B´C´ cuyos lados son A´B´ = s (1 + ()) (donde () es la deformación normal a lo largo de la línea AB que forma un ángulo con el eje x), A´C´ = x (1 + xx) y B´C´ = y (1 + yy); además el ángulo en C´ se transforma en /2 + xy. Aplicando la ley de cosenos al triángulo A´B´C´: (A´B´)2 = (A´C´)2 + (C´B´)2 – 2(A´C´)(C´B´) cos (/2 + xy) Figura 2.36. Elemento diferencial triangular, antes y después de la deformación Desarrollando y asumiendo que: Cos (/2 + xy) = - sen (xy ) - xy Si se desprecian los términos de segundo orden (por ejemplo x´x´2 respecto a x´x´), y por simplicidad xx=x, yy=y se logra: () = x cos2 + y sen2 + xy sen cos Con los ejes x´, y´ y usando las transformaciones trigonométricas para pasar al ángulo doble se tiene: Profesor: José Acero Martínez 124 Mecánica Avanzada CAPITULO 2: Teoría de Esfuerzos y Deformaciones Escuela de Posgrado PUCP cos(2 ) xy sen(2 ) 2 2 2 y´ x y x y cos(2 ) xy sen(2 ) 2 2 2 x´ x y x y x´ y´ ( x y ) sen(2 ) xy cos(2 ) (2.92a) (2.92b) (2.92c) Sumando las dos primeras expresiones se logra la invariante de deformaciones: x´ + y´ = x + y (2.92d) Dado que se cumple que z = z´ = 0, se verifica la invariante J1 de deformaciones. Círculo de Mohr para el estado plano de deformaciones De la expresión de x´y´ se puede obtener: x´ y´ 2 ( x y ) 2 sen(2 ) xy 2 cos(2 ) (2.92e) Las expresiones (a), (b) y (e) para la transformación de deformación plana se parecen a las ecuaciones deducidas para la transformación de esfuerzo plano, cambiando los esfuerzos normales i por deformaciones unitarias lineales i, y los esfuerzos cortantes ij por la mitad de las deformaciones por corte ij /2. Como es lógico, se puede también construir una circunferencia (conocida como círculo de Mohr de deformaciones) en un sistema coordenado donde las deformaciones unitarias lineales son las abscisas y las deformaciones de corte () son las ordenadas. La circunferencia tiene Centro C, y Radio R (Figura 2.37): Figura 2.37. Representación del círculo de Mohr para deformaciones Profesor: José Acero Martínez 125 Mecánica Avanzada CAPITULO 2: Teoría de Esfuerzos y Deformaciones Escuela de Posgrado PUCP C = (x + y) /2 Centro: x y xy 2 2 2 R Radio: (2.93a) 2 (2.93b) Como antes, es conveniente trazar el eje de ordenadas como positivo hacia abajo, para que los giros que se hagan en el elemento diferencial y en el círculo de Mohr sean del mismo sentido. Las deformaciones principales son: 1 = C + R (el valor de máx) 2 = C - R (el valor de mín) (2.93c) (2.93d) Los ejes principales “a” y “b” correspondientes (figura 2.38) se obtienen haciendo que la deformación por corte ij sea cero; entonces, se logra el ángulo p: Figura 2.38. Ejes principales de deformación tg (2 p) xy x y (2.93e) La deformación cortante máxima en el plano está definida por los puntos D y E en el círculo de Mohr (figura 2.37), y es igual al diámetro del círculo: max ( plano) 2R ( x y ) 2 2 xy (2.93f) Por último, para obtener las deformaciones en ejes x´- y´ rotados un ángulo respecto a los ejes x-y, se debe rotar en el círculo de Mohr un ángulo 2 en el mismo sentido (figura 2.39). Profesor: José Acero Martínez 126 Mecánica Avanzada CAPITULO 2: Teoría de Esfuerzos y Deformaciones Escuela de Posgrado PUCP Figura 2.39. Círculo de Mohr de deformaciones, rotados un ángulo 2 Análisis Tridimensional de la deformación Se necesita estudiar la deformación en un punto en forma tridimensional a fin de hallar la deformación cortante máxima máx en el punto. Este valor es el diámetro del mayor de los tres círculos mostrados en la figura 2.40, por lo que: máx = máx - mín (2.94) Donde máx y mín representan los valores algebraicos de las deformaciones máxima y mínima en el punto. Figura 2.40. Círculo de Mohr de deformaciones, rotados un ángulo 2 En el caso de un estado de deformación plana, siendo “x” e “y” los ejes en el plano de la deformación, el eje z es uno de los ejes principales y el punto correspondiente en el diagrama de los círculos de Mohr es el origen O. Si los puntos A y B que definen los ejes principales en el plano caen en lados opuestos de O (figura 2.41) entonces, las deformaciones principales correspondientes representan las deformaciones máxima y mínima en el punto, y la máxima deformación de corte es igual a la máxima deformación de corte en el mismo plano de la deformación, correspondiente a los puntos D y E. Profesor: José Acero Martínez 127 Mecánica Avanzada CAPITULO 2: Teoría de Esfuerzos y Deformaciones Escuela de Posgrado PUCP Figura 2.41. Círculo de Mohr de deformaciones Si en cambio, A y B están en el mismo lado de O, (figura 2.42) entonces, las deformaciones principales a b tienen el mismo signo, entonces la deformación por corte máxima está definida por los puntos D´ y E´ en el círculo de diámetro OA y se cumple que máx = máx. Figura 2.42. Círculo de Mohr de deformaciones En el caso de estado plano de esfuerzos, también puede ocurrir que los puntos asociados a los ejes principales en el plano A y B estén en el mismo lado del origen O (figura 2.43), y a pesar que la tercera deformación principal C tiene un valor no nulo, la deformación de corte máxima es igual al diámetro del círculo AC correspondiente a una rotación alrededor del eje b, fuera del plano del esfuerzo. Profesor: José Acero Martínez 128 Mecánica Avanzada CAPITULO 2: Teoría de Esfuerzos y Deformaciones Escuela de Posgrado PUCP Figura 2.43. Círculo de Mohr de deformaciones Comparación entre estado de esfuerzo plano y estado de deformación unitaria plana La figura 2.44, muestra claramente la comparación entre esfuerzo plano y deformación unitaria plana, notar que en esfuerzo plano (en el plano xy), se puede dar deformaciones en “z” y que en deformación unitaria plana (en el plano xy), se puede dar esfuerzos en “z”. Figura 2.44. Comparación de esfuerzo plano con deformación unitaria plana (Resistencia de Materiales - Timoshenko) Ecuaciones para determinación de deformaciones en rosetas Las deformaciones en rosetas, se obtienen aplicando la ecuación siguiente: () = x cos2 + y sen2 + xy sen cos Profesor: José Acero Martínez 129 Mecánica Avanzada CAPITULO 2: Teoría de Esfuerzos y Deformaciones Escuela de Posgrado PUCP La tabla 2.1, muestra las ecuaciones para determinar las deformaciones en las direcciones de los deformímetros o strain gages. Tabla N° 2.1. Ecuaciones para determinación de deformaciones en rosetas Tipo de roseta Ecuaciones para determinar las deformaciones a , b , c a b c x y x y 2 x y 2 2 x y x y 2 x y 2 2 cos(2 ) xy sen(2 ) cos 2( ) xy sen2( ) cos 2( ) xy sen2( ) a x c y xy b a c 2 a x b c x 4 x 3 y 4 3 y xy 3 2 xy 3 4 4 2 1 y (2( b c ) a ) 3 3 xy ( c b ) 3 a x cos 2 ( ) y sen 2 ( ) xy sen(2 ) b x cos 2 ( ) y sen 2 ( ) xy sen(2 ) ( b ) xy a sen(2 ) Profesor: José Acero Martínez 130 Mecánica Avanzada CAPITULO 2: Teoría de Esfuerzos y Deformaciones Escuela de Posgrado PUCP Ejemplo 2.12. Se tiene una placa cuadrada de 1m de lado en un estado de deformación plano zz xz yz 0 Determinar los desplazamientos y los deformaciones para los ejes x-y, sabiendo que los desplazamientos son pequeños Se sabe que las funciones lineales de los lados son rectas antes y después de la deformación ax by cx dy a,b,c,d constantes Evaluando en los puntos A, B y C, se tiene: Punto A: x=0, y=1.0m A 3mm a(0) b(1) b=-0.003 m Punto C: x=1 m, y=0 C 1mm c(1) d (0) c=0.001 m Punto B: x=1m, y=1m A 5mm a(1) (0,003)(1) a=-0.002 m B 3.5mm 0,001(1) d (1) d=0.0025m Para cualquier punto podemos escribir: 0,002 x 0,003 y 0,001x 0,0025 y Para deformaciones pequeñas se tiene: xx Profesor: José Acero Martínez u 0,002 x 131 Mecánica Avanzada CAPITULO 2: Teoría de Esfuerzos y Deformaciones Escuela de Posgrado PUCP v 0,0025 y 1 v u xy 2 x y xy 2 xy 0,001 (0,003) xy 0,002 yy También se pueden evaluar las segundas derivadas, teniendo 2 2 xy 2 xx yy 2 2 xy y 2 x Sus dos derivadas son 0+0=0 Ejemplo 2.13. Determinar las deformaciones principales y el estado de deformaciones en un elemento rotado 25° en forma antihorario con los ejes de referencia xx 440 yy 160 xy 80 Determinar las deformaciones principales y el estado de deformaciones en un elemento rotado 25° en forma antihorario con los ejes de referencia Centro c 440 160 300 2 Radio (440 300) 2 80 2 161 max c R 461 min c R 139 tg(2θp)=80/140 θp=14.87º Profesor: José Acero Martínez 132 Mecánica Avanzada CAPITULO 2: Teoría de Esfuerzos y Deformaciones Escuela de Posgrado PUCP Luego el ángulo con respecto al eje girado x´ desde el eje principal, será: px1 50 2 p 50 29.74 79,74 Utilizando el círculo de Mohr se tendrá: x´ C R cos 79,74 329 328,71 y C R cos 79,74 271 xy R sin 79,74 158,66 Otra manera de obtener los mismos resultados, será: x´ x y y´ 2 x y x y 2 cos 2 xy sin 2 328,71 x y cos 2 xy sin 2 271 2 2 xy´ x y sin 2 xy cos 2 158,66 2 2 2 Ejemplo 2.14. Las deformaciones obtenidas en la roseta mostrada son: 1 93,1 2 385 3 210 Se pide hallar: a) La orientación y magnitud de las deformaciones principales en el plano de la roseta b) La deformación constante máximo en el plano Profesor: José Acero Martínez 133 Mecánica Avanzada CAPITULO 2: Teoría de Esfuerzos y Deformaciones Escuela de Posgrado PUCP Solución a. Del gráfico podemos indicar que: x 2 385 En general 1 x cos 2 1 y sin 2 1 xy sin 1 cos 1 93,1 385 cos 2 (75 ) y sin 2 (75 ) xy sin(75 ) cos(75 ) 0,93 y 0,25 xy 118,89 (a) 3 210 385 cos 2 (75 ) y sin 2 (75 ) xy sin(75 ) cos(75 ) 0,933 y 0,25 xy 184,21 (b) Desarrollando la ecuación (a) y (b), se tiene: y 35.0 xy 606.0 ó xy 303 Calculando el centro y radio del círculo de Mohr: Centro = Radio = Profesor: José Acero Martínez 385 35 210 2 385 2102 606 / 22 350 134 Mecánica Avanzada CAPITULO 2: Teoría de Esfuerzos y Deformaciones Escuela de Posgrado PUCP La orientación y magnitud de las deformaciones principales en el plano de la roseta max a 210 350 560 min b 210 350 140 tg(2θp)=303/175 θp=30° b. La deformación constante máximo en el plano max 2 350 700 Profesor: José Acero Martínez 135