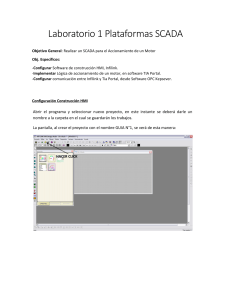
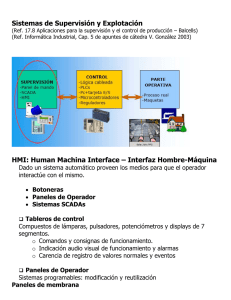
TELEMETRIA SCADA Y DCS VELASCO CARLOS SOLANO JOFFRE SCADA SCADA proviene de las siglas de Supervisory Control And Data Acquisition (Adquisición de datos y supervisión de control). Es una aplicación software de control de producción, que se comunica con los dispositivos de campo y controla el proceso de forma automática desde la pantalla del ordenador. Proporciona información del proceso a diversos usuarios: operadores, supervisiores de control de calidad, supervisión, mantenimiento, etc. SCADA Los sistemas de interfaz entre usuario y planta basados en paneles de control repletos de indicadores luminosos, instrumentos de medida y pulsadores, están siendo sustituidos por sistemas digitales que implementan el panel sobre la pantalla de un ordenador. El control directo lo realizan los controladores autónomos digitales y/o autómatas programables y están conectados a un ordenador que realiza las funciones de diálogo con el operador, tratamiento de la información y control de la producción, utilizando el SCADA. ESQUEMA BÁSICO SCADA Esquema básico de un sistema de Adquisición, supervisión y control. FUNCIONES PRINCIPALES Adquisición de datos, para recoger, procesar y almacenar la información recibida. Supervisión, para observar desde un monitor la evolución de las variables de control. Control, para modificar la evolución del proceso, actuando bien sobre los reguladores autónomos básicos (consignas, alarmas, menús, etc.) bien directamente sobre el proceso mediante las salidas conectadas. FUNCIONES PRINCIPALES Transmisión. De información con dispositivos de campo y otros PC. Base de datos. Gestión de datos con bajos tiempos de acceso. Presentación. Representación gráfica de los datos. Interfaz del Operador o HMI (Human Machine Interface). Explotación. De los datos adquiridos para gestión de la calidad, control estadístico, gestión de la producción y gestión administrativa y financiera. PRESTACIONES PARA UN SISTEMA SCADA Un paquete SCADA debe de ofrecer las siguientes prestaciones: ➢ Posibilidad de crear paneles de alarma: que exigen la presencia del operador para reconocer una parada o situación de alarma, con registro de incidencias. ➢ Generación de históricos de señal de planta: que pueden ser volcados para su proceso sobre una hoja de cálculo. ➢ Ejecución de programas: que modifican la ley de control, o incluso el programa total sobre el autómata, bajo ciertas condiciones. ➢ Posibilidad de programación numérica: que permite realizar cálculos aritméticos de elevada resolución sobre la CPU del ordenador, y no sobre la del autómata, menos especializado, etc. REQUISITOS PARA UN SISTEMA SCADA Un SCADA debe cumplir varios objetivos: Deben ser sistemas de arquitectura abierta, capaces de crecer o adaptarse según las necesidades cambiantes de la empresa. Deben comunicarse con total facilidad y de forma transparente al usuario con el equipo de planta y con el resto de la empresa (redes locales y de gestión). Deben ser programas sencillos de instalar, sin excesivas exigencias de hardware, y fáciles de utilizar, con interfaces amigables con el usuario. MODULOS SCADA Los módulos o bloques software son los siguientes: ✓ Configuración. ✓ Interfaz Gráfico del Operador. ✓ Módulo de Proceso. ✓ Gestión de Archivo de Datos. ✓ Comunicación. EJEMPLOS DE SOFTWARE SCADA Algunos de los programas SCADA, o que incluyen SCADA como parte de ellos, son: Aimax, de Desin Instruments S.A. CUBE, Orsi España S.A. FIX, de Intellution. Lookout, National Instruments. Monitor Pro, de Schneider Electric. SCADA InTouch, de LOGITEK. SYSMAC SCS, de Omron. Scatt Graph 5000, de ABB. WinCC, de Siemens. SISTEMA DE COMUNICACIÓN DEL SISTEMA SCADA La forma en que la información será transmitida, el medio físico y el lenguaje que se utilice. El sistema debe contar con un PROTOCOLO DE COMUNICACIONES Permite el intercambio de información entre diferentes elementos que componen una Red Industrial. PROTOCOLO TCP/IP TCP/IP define cuidadosamente cómo se mueve la información desde el remitente hasta el destinatario. El conjunto de protocolos TCP/IP puede interpretarse en términos de capas (o niveles). CAPAS DE PROTOCOLO La capa de red de Internet pone el paquete en un datagrama de IP (Internet Protocol), pone la cabecera y la cola de datagrama, decide dónde enviar el datagrama (directamente a un destino o a una pasarela) y pasa el datagrama a la capa de interfaz de red. La capa de interfaz de red acepta los datagramas IP y los transmite como tramas a través de un hardware de red específico, por ejemplo redes Ethernet o de Red en anillo. Las tramas recibidas por un sistema principal pasan a través de las capas de protocolo en sentido inverso. Cada capa quita la información de cabecera correspondiente, hasta que los datos regresan a la capa de aplicación. La capa de interfaz de red (en este caso, un adaptador Ethernet) recibe las tramas. La capa de interfaz de red quita la cabecera Ethernet y envía el datagrama hacia arriba hasta la capa de red. CAPAS DE PROTOCOLO En la capa de red, Protocolo Internet quita la cabecera IP y envía el paquete hacia arriba hasta la capa de transporte. En la capa de transporte, TCP (en este caso) quita la cabecera TCP y envía los datos hacia arriba hasta la capa de aplicación. MOVIMIENTO DE LA INFORMACIÓN DESDE LA APLICACIÓN REMITENTE HASTA EL SISTEMA PRINCIPAL DESTINATARIO MOVIMIENTO DE LA INFORMACIÓN DESDE EL SISTEMA PRINCIPAL HASTA LA APLICACIÓN TRANSMISIONES Y RECEPCIONES DE DATOS DE SISTEMA PRINCIPAL UNIDAD TERMINAL REMOTA (RTU) Una unidad terminal remota (UTR) es un microprocesador dispositivo electrónico controlado que interconecta los objetos del mundo físico a un sistema de control distribuido o SCADA (sistema de control y de adquisición de datos) mediante la transmisión de telemetría de datos al sistema, y mediante el uso de mensajes desde el sistema de control para controlar objetos conectados. Otro término que puede ser utilizado para RTU es la unidad de telemetría remota, el término uso común varía con el área de aplicación general. UNIDAD TERMINAL REMOTA (RTU) MTU - MASTER TERMINAL UNIT Es uno de los componentes más importantes en un sistema de control Scada, en tal sentido se debe tener claro las funciones que cumple este equipo dentro del sistema y cuáles son los criterios de selección del mismo. La unidad maestra MTU envía información a cada RTU utilizando un medio común de comunicación y un protocolo común. Ambos, la estación maestra y el RTU, básicamente tienen los mismos equipos de comunicación. La diferencia radica en que la estación maestra MTU es la única que puede iniciar la conversación. Esta comunicación es iniciada por un programa dentro del MTU que puede ser disparado por una instrucción manual dada por el operador o por el mismo programa del MTU. FUNCIONES (MTU) La parte más visible de un sistema SCADA es la estación central o MTU. Éste es el "centro neurálgico" del sistema, y es el componente del cual el personal de operaciones se valdrá para ver la mayoría de la planta. Una MTU a veces se llama HMI -Human Machine Interface, interfaz ser humano – máquina. Las funciones principales de una MTU de SCADA son: FUNCIONES (MTU) • Adquisición de datos. Recolección de datos de los RTU’s. • Trending. Salvar los datos en una base de datos, y ponerlos a disposición de los operadores en forma de gráficos. • Procesamiento de Alarmas. Analizar los datos recogidos de los RTU's para ver si han ocurrido condiciones anormales, y alertar a personal de operaciones sobre las mismas. • Control. Control a Lazo Cerrado, e iniciados por operador. • Visualizaciones. Gráficos del equipamiento actualizado para reflejar datos del campo. • Informes. La mayoría de los sistemas SCADA tienen un ordenador dedicado a la producción de reportes conectado en red (LAN o similar) con el principal. FUNCIONES (MTU) • Mantenimiento del Sistema Mirror, es decir, mantener un sistema idéntico con la capacidad segura de asumir el control inmediatamente si el principal falla. • Interfaces con otros sistemas. Transferencia de datos hacia y desde otros sistemas corporativos para, por ejemplo, el procesamiento de órdenes de trabajo, de compra, la actualización de bases de datos, etc. • Seguridad. Control de acceso a los distintos componentes del sistema. • Administración de la red. Monitoreo de la red de comunicaciones. • Administración de la Base de datos. Agregar nuevas estaciones, puntos, gráficos, puntos de cambio de alarmas, y en general, reconfigurar el sistema. FUNCIONES (MTU) • Aplicaciones especiales. Casi todos los sistemas SCADA tendrá cierto software de aplicación especial, asociado generalmente al monitoreo y al control de la planta. • Sistemas expertos, sistemas de modelado. Los más avanzados pueden incluir sistemas expertos incorporados, o capacidad de modelado de datos. EJEMPLO DE UN SISTEMA MTU A continuación se muestra un ejemplo que consiste de un proceso simple para el control de una línea de alimentación de combustibles. PROTOCOLOS DCS Un Sistema de procesos Distribuido o SCD, más conocido por sus siglas en inglés DCS (Distributed Control System), es un sistema de control aplicado a procesos industriales complejos en las grandes industrias como petroquímicas, papeleras, metalúrgicas, centrales de generación, plantas de tratamiento de aguas, incineradoras o la industria farmacéutica. Los primeros DCS datan de 1975 y controlaban procesos de hasta 5000 señales. Las capacidades actuales de un DCS pueden llegar hasta las 250.000 señales. SISTEMA DE CONTROL DISTRIBUIDO(DCS) CARACTERISTICAS Los DCS trabajan con una sola Base de Datos integrada para todas las señales, variables, objetos gráficos, alarmas y eventos del sistema. En los DCS la herramienta de ingeniería para programar el sistema es sólo una y opera de forma centralizada para desarrollar la lógica de sus controladores o los objetos gráficos de la monitorización. Desde este puesto de ingeniería se cargan los programas de forma transparente a los equipos del sistema. La plataforma de programación es multi-usuario de forma que varios programadores pueden trabajar simultáneamente sobre el sistema de forma segura sin conflictos de versiones. Todos los equipos del sistema (ordenadores, servidores, controladores) están sincronizados contra un mismo reloj patrón, de forma que todas las medidas, alarmas y eventos tienen una misma marca de tiempo. El software de control DCS dispone de herramientas para la gestión de la información de planta, integrándola verticalmente hacia la cadena de toma de decisiones y otros sistemas ubicados más arriba en la jerarquía de la producción. ARQUITECTURA DE UN DCS NIVELES DE CONTROL EN UN DCS Un DCS aborda la complejidad de los procesos industriales dividiendo en cuatro niveles funcionales su alcance. • Nivel de Operación. Este nivel es el de interacción del sistema con los operadores de la planta y es donde se encuentran los sistemas informáticos para la monitorización del proceso y adquisición de la información en tiempo real, que se almacena en la base de datos transformándola en datos históricos para análisis posteriores. Este nivel gestiona además el intercambio de información con otros sistemas de mantenimiento y planificación de la producción. NIVELES DE CONTROL EN UN DCS • Nivel de control. En un DCS la responsabilidad del control de las diferentes partes funcionales del proceso, se asignan a varios controladores locales distribuidos por la instalación, en lugar de centralizar estas funciones en un solo punto. Los controladores están conectados entre sí y con las estaciones de operación mediante redes de comunicación. NIVELES DE CONTROL EN UN DCS • Nivel módulos de Entrada/Salida. Los módulos de entradas/salidas para señales cableadas, se distribuyen por la instalación, es lo que se denomina "periferia descentralizada", esto ahorra tiradas de cables de señal aproximando la electrónica del control hasta los elementos de campo. Estos módulos de entrada/salida se comunican con los controladores mediante protocolos específicos o de bus de campo (en inglés "fieldbus") para garantizar los tiempos de comunicación entre controlador y periferia en unos tiempos mínimos, del orden de milisegundos, adecuados a las necesidades del proceso. NIVELES DE CONTROL EN UN DCS • Nivel de elementos de campo. Estos equipos permiten funcionalidades adicionales como gestionar su mantenimiento o configurar sus parámetros de comportamiento de forma remota desde el nivel de operación. Los instrumentos de este nivel deben ser compatibles con el bus de campo elegido, ya sea Profibus, Fieldbus Foundation u otro. También existe la posibilidad de integrar instrumentos con protocolo HART como alternativa al bus de campo. NIVELES DE CONTROL EN UN DCS DIFERENCIAS TIPICAS ENTRE SISTEMAS SCADA Y DCS