")
Ejercicios Resueltos
1
Alejandro T. Brewer
Método de las Fuerzas - Pórtico Plano: error de montaje.
L1
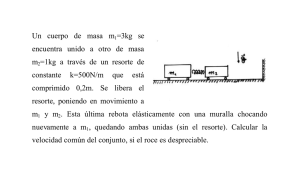
Durante el motanje el resorte AB se comprimió 2 cm. Se pide:
∆Ts (+)
P
∆Ti (+)
A
KR
B
L2
a) Trazar diagramas de momento flector, corte y normal.
b) Calcular el desplazamiento vertical del punto A.
~
kg
E = 2.1 × 106 cm
2
α = 1 × 10−5 C1 ; ∆Ts = 50 C ; ∆Ti = 10 C
~
~ ; KR = 60 kg
L1 = 60 cm ; L2 = 80 cm ; P = 100 kg
cm
Viga 1 : A1 = 2 cm2 , I1 = 2.4 cm4 , h1 = 3.8 cm
Viga 2 : A2 = 1.3 cm2 , I2 = 0.98 cm4 , h2 = 3 cm
Figure 1: Planteo del problema
Descripción y enfoques del problema:
El problema es un pórtico plano, hiperestático interno de primer orden. Está construido con dos
barras de pórtico plano unidos por un resorte. En la barra superior actua una carga P aplicada
a la distancia L1 y experimenta un salto de temperatura superior e inferior a todo su largo (L2 ).
Por otro lado, el resorte resultó largo (e = 2 cm), respecto a la distancia AB que separa a las
vigas antes de que actue alguna carga. El problema resulta hiperestático interno de primer orden
y para resolverlo, una opción, es cortar el resorte en el punto A.
Dicho esto, el problema se va a resolver utilizando 2 enfoques diferentes:
Enfoque 1: Tratar el error de montaje como si el error estuviera concentrado en el extremo del
resorte.
Enfoque 2: Tratar el error de montaje como si el error estuviera distribuido en la longitud
del resorte.
Este último enfoque es más sencillo (y
aconsejable) y como se verá, convierte al
alargamiento del extremo en una deformación.
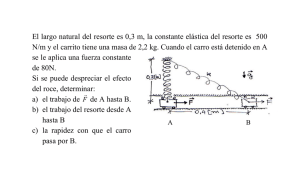
Solución según el enfoque 1:
En la gura 2 se muestra la estructura original y su descomposición, por superposición, en la suma
P , salto de temperatura
y error de montaje y el estado 1 que muestra la incógnita hiperestática X1 que actua a ambos
de dos estructura isostáticas: el estado 0 que contiene todas cargas:
lados es decir sobre la viga y sobre el resorte.
P L1
∆Ts (+)
∆Ti (+)
P
∆Ts (+)
A
KR
1
80
δ10
P
P
e = 2 cm
∆Ti (+) δ10
δ11
1
X1 80
1
B
κT
Estado ”0”
εT
Figure 2: Enfoque 1
1 δ11
1
Estado ”1”
Ejercicios Resueltos
Alejandro T. Brewer
2
Obsérvese que en el estado 0, todos los diagramas corresponden a la viga superior. Los valores
del alargamiento y curvatura térmicos son:
εT =
α (4Ts + 4Ti )
= 30 × 10−5
2
;
κT =
1
α (4Ts − 4Ti )
= 10.53 × 10−5
h1
cm
(1)
Para este problema, la ecuación de compatibilidad resulta:
δ10 + X1 δ11 = 0
(2)
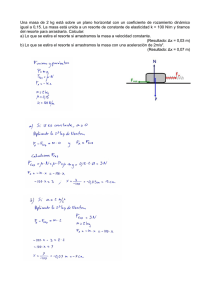
Cálculo de δ10 (desplazamiento en el corte 1, debido a las cargas del estado 0):
Para este cálculo, se iguala el trabajo externo e interno de las fuerzas del estado 1 a
través de los desplazamientos del estado 0. Si se desprecia la contribución de los términos
de corte, resulta:
60 80
80
6000
80
20
1 × (δ10 + 2) =
TV E
0
EI1
κT
dx
60
6000 (2 80 + 20) = −2.14286
− 6EI
1
dx
0
− 12 802 10.53 × 10−5 = −0.33696
TV I
δ10 = −2.14286 − 0.33696 − 2 = −4.47982 cm
Figure 3: Enfoque 1: Cálculo de δ10
Observaciones respecto al cálculo del δ10 :
1. El δ10 en este caso, está ubicado en un corte entre la barra y el resorte, y representa el
desplazamiento relativo de las partes (en el corte) en el estado 0, de tal modo que junto
con el desplazamiento X1 δ11 , que es el desplazamiento relativo de las partes en el estado 1,
debe ser cero a n de garantizar la integridad de la estructura (ver ec.(2)).
2. Si el resorte no fuera largo, el T V E sería T V E = 1 × δ10 . Para medir el trabajo que hace
las cargas unitarias 1 (una sobre el resorte y otra sobre la viga) que aparecen en el estado
1, cuando ocurre el δ10 en el estado 0, debe jarse (dejarla inmóvil) (en el estado 0) una
de las partes, por ejemplo el punto sobre la viga y asumir que este punto permanece quieto
mientras la carga unitaria que actua en el resorte se desplaza δ10 .
3. Cuando además del δ10 aparece un extremo largo, (y en forma similar a lo que se hace al
considerar un desplazamiento prejado), debe sumarse el trabajo de la carga unitaria (del
estado 1) por el desplazamiento 2 cm del resorte que es largo. O sea T V E = 1×δ10 +1×2.
Cálculo de δ11 (desplazamiento en el corte 1, debido a las cargas del estado 1):
Para este cálculo, se iguala el trabajo externo e interno de las fuerzas del estado 1 a
través de los desplazamientos del estado 1. Si se desprecia la contribución de los términos
de corte, resulta:
Ejercicios Resueltos
80 80
1 × (δ11 ) =
TV E
3 EI1
80 80
2
EI1
0 803
3
Alejandro T. Brewer
dx
2
EI2
0
12
KR
dx
803
= 82.928 × 10−3
3 EI2
= 33.862 × 10−3
TV I
1
= 0.13346 cm
δ11 = (33.862 + 82.928) × 10−3 + 60
~
Kg
Figure 4: Cálculo de δ11
Cálculo de X1 : reemplazando los valores de δ10 y δ11 en la ec. (2):
X1 =
4.47982
−δ10
~
=
= 33.57 Kg
δ11
0.13346
(3)
Diagramas de momento ector, corte y normal: encontrado el valor de la incógnita hiperestática X1 , se aplica el principio de superposición en la gura anterior y se suman los diagramas
correspondientes de esfuerzos del estado 0 con los del estado 1 multiplicados por X1 . Nótese
que las deformaciones térmicas (εT y
κT ) que aparecen en el estado 0, no participan en la
denición de los esfuerzos, al momento de sumar los estados 0 y 1.
Flector:
6000
Estado ”0”
Corte:
33.57 80
100
Estado ”0”
3314.4
80
66.43
1
33.57
1
Estado ”1”
Normal:
33.57
1
Estado ”0”
671.4
2685.6
Estado ”1”
33.57
33.57
33.57
Estado ”1”
Figure 5: Esfuerzos nales
Cálculo del desplazamiento vertical del punto A: dado que se conoce el valor de la incógnita
hiperestática, es posible aplicar el Principio de Trabajos Virtuales a la estructura
isostática
equivalente. Sin embargo, a la hora de plantear el sistema isostático auxiliar (que se considerará
Ejercicios Resueltos
4
Alejandro T. Brewer
idéntico al isostático fundamental) podrían surgir las alternativas mostradas en la gura.
Se
discuten las posibilidades planteadas:
Auxiliares ”imaginables”
1
1
80
1
1
80
1
1
80
1
80
(b)
(a)
(c)
Figure 6: Diagramas auxiliares: a) Desplaz. relativo ; b y c) Despl. Absoluto
El caso (a) no conducirá a determinar el desplazamiento vertical del punto A. Si se considera nuevamente la solución del problema hiperestatico inicial, se observa que δ10 mide el desplazamiento
relativo de las partes cortadas en el estado 0 y δ11 el desplazamiento relativo de las secciones
cortadas en el estado 1. La determinación de X1 se hizo imponiendo una condición de compatibilidad que exigía que el desplazamiento relativo de las secciones en el corte fuera nulo. Entonces,
un auxiliar como el (a) lo que mide es el desplazamiento relativo de las secciones. Obviamente
dará cero. Cualquiera de las alternativas (b) o (c) son auxiliares que medirán el desplazamiento
del punto A respecto a un sistema de referencia dado. Se explorarán ambas posibilidades.
Enfoque 1: cálculo del desplazamiento vertical del punto A, uso del auxiliar (b):
Se debe plantear el trabajo de las fuerzas (externas e internas) del auxiliar a través de los desplazamientos y deformaciones del real. Debe tenerse en cuenta que los desplazamientos del sistema real
se componen de lo que sucede en el estado 0, más X1 veces lo que ocurre en el estado 1:
60 80
80
6000
1 × δA =
TV E
0
EI1
X1
dx
60
6000 (2 80 + 20) = −2.14286
− 6EI
1
80
κT
80
20
0
3
dx
EI1
− 12 802 10.53 × 10−5 + 33.57 380
= 0.7998
EI1
TV I
δA = −2.14286 + 0.7998 = −1.343 cm (hacia abajo)
Figure 7: Desplazamiento absoluto de A. Auxiliar b)
Ejercicios Resueltos
5
Alejandro T. Brewer
Enfoque 1: Cálculo del desplazamiento vertical del punto A, uso del auxiliar (c):
80
TV E
80
80
T V E de ”e”
1 × δA − 1 × 2 =
X1
0
X1
KR
dx
EI2
3
δA = −1.343 cm
= −0.5595
− 33.57
60
−33.57 380
= −2.7839
EI2
(hacia abajo)
TV I
Figure 8: Enfoque 1: Desplazamiento absoluto de A. Auxiliar c)
Observaciones respecto al cálculo del δA :
1. Como era de esperar, el desplazamiento del punto A como perteneciente a la viga (auxiliar
b)), o como perteneciente al resorte (auxiliar c)) proporciona el mismo resultado.
2. A partir de la observación de los auxiliares b) y c) utilizados y de los resultados que se obtienen para δA , debiera quedar claro que el uso del auxiliar a) para calcular el desplazamiento
de A, producirá un desplazamiento nulo, ya que dicho auxiliar (el a)) mide el desplazamiento
relativo del punto A como perteneciente a la viga, y el punto A como perteneciente al extremo del resorte, desplazamiento que será nulo, porque así lo ha impuesto la ecuación de
compatibilidad (2).
Solución según el enfoque 2:
Como se mencionó anteriormente, en este enfoque, se plantea el problema asumiendo que en el
estado 0 se tiene una deformación especíca, asociada con el error de montaje de valor:
εk = +2/Lk
(4)
donde Lk es la longitud del resorte, que no se conoce, pero que, como se verá, no hace falta. El
planteo del problema queda:
P L1
∆Ts (+)
∆Ti (+)
P
∆Ts (+)
A
KR
1
80
δ10
P
P
εk
∆Ti (+) δ10
δ11
1 δ11
1
X1 80
1
B
κT
Estado ”0”
εT
1
Estado ”1”
Como se observa, el único cambio es la aparición de un diagrama de deformación εk en el estado
0. Es decir, que la única modicación lo será en el cálculo de δ10 . Para determinar su valor, se
debe plantear el principio de Trabajos Virtuales entre el auxiliar y el real. Ahora, la participación
Ejercicios Resueltos
6
Alejandro T. Brewer
del resorte en el trabajo virtual corresponde al miembro que contiene el Trabajo Virtual Interno
y entonces resulta:
Z
T V E = 1 × δ10 = T V I = −2.14286 − 0.33696 +
(−1) × (+εk )dx
| {z }
{z ”0” }
(5)
Lk | {z }
”1”
|
=−2
donde, en la última expresión se ha representado el trabajo virtual del resorte (comprimido en el
estado 1) con la deformación εk positiva del estado 0. La integral de un rectángulo con otro
rectángulo conduce a:
(−1) × (εk ) × Lk = −2
lo que conduce al resultado que podía anticiparse de que δ10 en la g. (3) es igual al obtenido
con el Enfoque 2 en la ec. (5).
Entonces, todos los resultados obtenidos en el Enfoque 1 son válidos para el Enfoque 2: δ11 , X1 ,
los diagramas de esfuerzos de la gura 5 y el cálculo de δA utilizando el diagrama auxiliar b) (ver
g. 6);
Pero, si ahora se requiere calcular el desplazamiento δA utilizando el auxiliar c), resulta:
80
X1
1 × δA =
TV E
0
1
80
80
X1
KR
dx
EI2
3
−33.57 380
= −2.7839
EI2
= −0.5595
− 33.57
60
TV I
εk
dx = −1.343 cm
(hacia abajo)
Lk
=2
Figure 9: Enfoque 2: Desplazamiento absoluto de A. Auxiliar c)
que como era de esperar, arroja el mismo resultado.
Debe quedar claro que el analista debe optar por considerar el alargamiento por error como
un desplazamiento concentrado o como un desplazamiento distribuido. Pero no puede hacer
simultaneamente las dos cosas.
Consejo: cuando en una estructura aparece lo que se entiende como error de montaje, conviene
convertir dicho error en una deformación para su tratamiento por el Método de las Fuerzas e
incluirlo, si corresponde, en el miembro asociado al TVI.