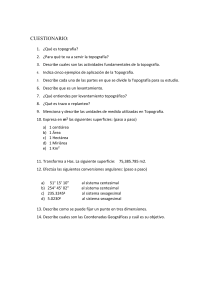
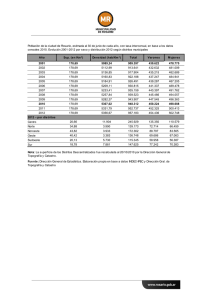
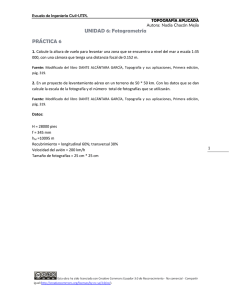
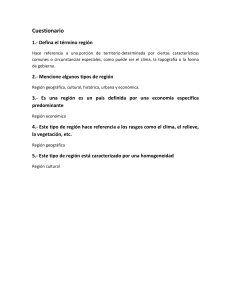
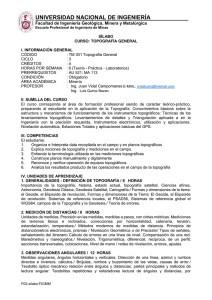
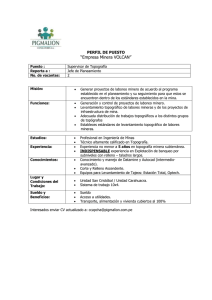
Topografía 1 Evolución del Equipo Topográfico Y Métodos 1 Topografía 1 INDICE 3. Principios básicos Geodesia, Agrimensura y Cartografía. Pagina 5 3.1 Conceptos de geodesia y vínculos con otras ciencias. 5 3.2 Principios de la topografía (Agrimensura). 8 3.2.1 Definiciones, historia de la Topografía y Geodesia. 8 3.2.2 Teoría de errores, ejercicios. 3.2.2.1 Definiciones fundamentales 3.2.2.1.1 Medición Directa. 3.2.2.1.2 Medición Indirecta. 3.2.2.1.3 Medición Condicionada. 3.2.2.1.4 Valor Observado. 3.2.2.1.5 Valor Verdadero. 3.2.2.1.6 Valor más Probable. 3.2.2.1.7 Precisión. 3.2.2.1.8 Exactitud. 9 9 9 9 9 9 9 10 10 10 3.2.2.2 Tipos de Errores. 3.2.2.2.1 Error Verdadero 3.2.2.2.2 Error Residuales. 10 10 10 3.2.2.3 Clasificación de los Errores. 3.2.2.3.1 Equivocaciones o Errores Groseros. 3.2.2.3.2 Errores Sistemáticos. 3.2.2.3.3 Errores Accidentales. 3.2.2.3.3.1 Valor más Probable. 3.2.2.3.3.2 Error Medio Cuadrático. 11 11 11 11 11 13 3.2.3 Sistema de Unidad 14 3.2.4 Medición de Distancias y Problemas de Campo. 3.2.4.1 Medición a Pasos. 3.2.4.2 Medición con Odómetro. 3.2.4.3 Telémetros. 3.2.4.4 Taquimetría. 3.2.4.5 Métodos de la Barra Subtensa. 3.2.4.6 Con Instrumentos Electrónicos para la Medición de Distancias. 17 17 17 18 18 18 19 3.2.5. Accesorios de la cinta 3.2.5.1 Pasos para medir con cinta. 3.2.5.1.1 Alineación. 21 23 23 2 Topografía 1 3.2.5.1.2 Estiramiento 3.2.5.1.3 Aplome. 3.2.5.1.4 Marcaje. 3.2.5.1.5 Lectura. 3.2.5.1.6 Anotación. 3.2.6 Precisiones de la Mediciones con Cinta. 24 24 24 25 25 25 3.2.7 La Brújula. 29 3.2.8 Definiciones. 30 3.2.8.1 Rumbo. 30 3.2.8.2 Acimut. 31 3.2.8.3 Declinaciones Magnéticas. 32 3.2.8.3.1 Variaciones de las Declinaciones Magnéticas.34 3.2.8.3.1.1 Variación Secular. 34 3.2.8.3.1.2 Variación Diaria. 34 3.2.8.3.1.3 Variación Anual. 34 3.2.8.3.1.4 Variaciones Irregulares. 34 3.2.8.4 Atracción Local. 35 3.2.9 Métodos de Medida de Ángulos 3.2.9.1 Medida de un ángulo en una serie simple. 3.2.9.2 Medida de ángulo con 2 o más series simples 3.2.9.3 Medida de ángulo en 1 o más series completas. 3.2.9.4 Teodolito de Repetición 3.2.9.5 Teodolito de Reiterado. 37 38 38 38 39 39 4. El Teodolito 4.1 Introducción Histórica 4.2 Partes constructivas fundamentales 4.2.1 Manejo y emplazamiento de un teodolito 40 40 41 41 4.3 Condiciones de ajuste del Teodolito 4.3.1 Control y ajuste del eje de colimación 4.3.2 Control y ajuste del retículo 4.3.3 Control y ajuste del eje secundario 43 43 44 44 4.4 Diferencia entre transito y Teodolito 45 5. Poligonaciòn 5.1 Levantamiento de un lote por medio de poligonales 46 47 6. Radial 6.1 Levantamiento de un lote con teodolito y cinta 51 51 3 Topografía 1 7. Taquimetría 7.1 Tipos de taquimetría 7.2 Recomendaciones 54 54 56 8. Nivelación 8.1 Nivelación Diferencial 8.1.1 Nivelación por doble punto de liga 8.1.2 Nivelación por doble altura de aparato 8.2 Nivelación Trigonométrica 8.3 Nivelación Barométrica 57 58 62 62 64 68 9. Curvas de Nivel 9.1 Características de las curvas de nivel 9.1.1 Interpolación 9.1.1.1 Por estimación 9.1.1.2 Por computación aritmética 9.1.1.3 Gráficamente 9.2 Nivelación de un terreno 9.2.1. Sistema de radiación 9.2.2 Sistema de cuadricula 9.2.3 Sistema faja de terreno 69 71 75 75 75 75 76 76 76 77 4 Topografía 1 3. PRINCIPIOS BASICOS DE LA GEODESIA, AGRIMENSURA Y CARTOGRAFIA 3.1 Conceptos de Geodesia y vínculo con otras Geociencias GEODESIA Aquella rama de las matemáticas aplicadas, que trata de determinar, por observaciones y mediciones, el tamaño y figura de la tierra, ubicación precisa de puntos, las distancias y direcciones de líneas en la superficie de la tierra y las variaciones de la gravedad terrestre. FOTOGRAMETRIA Ciencia o arte y tecnología de obtener información confiable acerca de objetos físicos por medio de mediciones de imágenes fotográficas. 5 Topografía 1 Restitución fotogramétrica Esquema de un vuelo fotogramétrico 6 Topografía 1 CARTOGRAFIA La cartografía USA símbolos y signos convencionales para comunicar “realidades” físicas, espaciales y abstractas. La cartografía es un medio de comunicación con su idioma propio. 7 Topografía 1 3.2 Principios de la topografía (Agrimensura). 3.2.1. Historia, definiciones de la topografía y geodesia. Desde los tiempos más antiguos el hombre observó la importancia de la propiedad inmueble como un bien de más seguridad que el resto de sus propiedades. La explicación de este hecho es que el bien inmueble ofrece mayores seguridades porque no puede ser normalmente destruido, robado ni trasladado, entre otras razones. Además, el bien inmueble tiene un valor permanente que es una garantía para otros tipos de operaciones. Por las razones anteriores a sido preocupación permanente del hombre el estudio de la forma de mantener y garantizar el bien inmueble. De esto tenemos pruebas en las legislaciones más antiguas que señalaban la forma de descripción y materialización de los derechos inmuebles. Es bien sabido que la simple descripción en palabras de la ubicación y linderos de una propiedad no son suficientes para el ejercicio de su posesión; por sí solas pueden prestarse a errores y malas interpretaciones. Se necesita algo más; una delimitación física exacta por mediciones que permitan restablecer en cualquier momento los linderos, sin duda alguna. Uno de los casos más conocidos de la antigüedad es el del Egipto, que se remonta a miles de años. El nilo con sus desplazamientos a lo largo del territorio provoca la desaparición de los linderos, precisamente en las zonas más valiosas. La circunstancia anterior obligó a los egipcios a establecer sistemas para el replanteo de las líneas de propiedad que habían desaparecido, cubiertas por el fango. La solución aplicada al problema fue el establecimiento de puntos fijos ubicados fuera de la zona afectada, de los cuales se partía para las mediciones terrestres. Para alcanzar la meta es necesario aplicar técnicas comprobadas: Mediciones e investigaciones que permitan la observación de mapas a escala grande e índices que contengan los datos de las propiedades. Esto es lo que se llama Catastro. La topografía ha tenido gran importancia desde el principio de la civilización sus primeras aplicaciones fueron las de medir y marcar los límites de los derechos de propiedad. A través de los años su importancia ha ido en aumento al haber una mayor demanda de diversos mapas y planos y la necesidad de establecer líneas y niveles más precisos como una guía para las operaciones de construcción. La topografía se encuentra actualmente en una etapa de cambio tecnológico en ascenso. Los avances están ocurriendo a una velocidad sin precedentes y están afectando virtualmente todas las áreas de la práctica topográfica de campo y de oficina. Entre los nuevos instrumentos que han revolucionado las actividades de campo están: -Los sistemas de levantamiento por satélites, (GPS). -Los teodolitos digitales electrónicos. 8 Topografía 1 -Los instrumentos de estación total con sus colectores de datos automáticos (de los cuales los más recientes son operaciones robótica mente). -Niveles digitales automáticos. En el trabajo de oficina, los avances en la computación han afectado los procedimientos usados en el procedimiento de la información, quizás el desarrollo creciente mas significativo en topografía ha sido los sistemas de información geográfica (GIS). Estos sistemas consistentes tanto de hardware como de software, permite al usuario almacenar, integrar, manipular, analizar y desplegar cualquier tipo de información. 3.2.2. Teoría de Errores 3.2.2.1 Definiciones Fundamentales 3.2.2.1.1 Medición Directa Una medición u observación es directa cuando se ejecuta sobre las mismas magnitudes físicas cuyo valor se desea (Comparación directa). Por ejemplo: La medición de una distancia con una cinta o la medición de un ángulo con un teodolito. 3.2.2.1.2 Medición Indirecta Una medición es indirecta cuando se ejecuta sobre magnitudes físicas tales que la magnitud que se desea esta en función de las medidas, por ejemplo: La medición de una distancia con la mira base o la determinación de diferencias de altura por métodos barométricos. 3.2.2.1.3 Medición Condicionada Una medición es condicionada, cuando guarda cierta relación con otras medidas, tal es el caso de los ángulos internos de un triángulo cuya suma debe ser 180 grados ó 200 gon según el sistema. 3.2.2.1.4 Valor Observado Es el que resulta de las observaciones después de realizar las correcciones instrumentales y del medio en que se trabaja. Por ejemplo: Al medir una línea con cinta se supone reducida al horizonte corregida por alineamiento problemas de tensión, temperatura, etc. 3.2.2.1.5 Valor Verdadero Es el valor teórico, exento de todo error de una magnitud física. Es un valor teórico desconocido que sirve únicamente para la derivación de las formulas en forma teórica. 9 Topografía 1 3.2.2.1.6 Valor Más Probable Por valor más probable de una magnitud se entiende el que más se acerca al valor verdadero de acuerdo a las observaciones hechas este valor es tanto mejor cuanto más precisas sean las observaciones. 3.2.2.1.7 Precisión Es el grado de perfección utilizado en los instrumento, en los métodos, en las observaciones y desde el punto de vista de cálculo precisión es la cantidad de cifras con que se efectúa un cálculo. 3.2.2.1.8 Exactitud Es el grado de aproximación al valor verdadero, dicho en otra forma, es el grado de conformidad con un patrón o modelo. Conocido el valor de exactitud es posible calcular el número de repeticiones necesarias para lograr esa exactitud. Una forma de explicar la diferencia entre Precisión y Exactitud 3.2.2.2 Tipos de Errores 3.2.2.2.1 Error Verdadero. Es la diferencia entre el valor verdadero y el valor observado es teórico. 3.2.2.2.2 El error verdadero también Errores Residuales. Son la diferencia entre el valor más probable y el valor observado se le designa con la letra (v). 10 Topografía 1 3.2.2..3 .Clasificación de los errores 3.2.2.3.1 Equivocaciones o Errores Groseros Los errores groseros técnicamente no se pueden decir que son defectos de los instrumentos ni de los métodos. Es la falsa determinación de un valor producto de un descuido, son evitables midiendo con cuidado y teniendo presente la premisa que dice: Que todo valor medido debe tener hasta donde sea posible otra medición independiente que sirva para comprobar. 3.2.2.3.2 Errores Sistemáticos La principal característica de estos errores es que actuar siempre en el mismo sentido, aumentando o disminuyendo quiere decir que tiene el mismo valor y signo. Son evitables o corregibles conociendo las causas que lo originaron. Por ejemplo: Cuando se mide con una cinta más corta las distancias tienen un exceso. 3.2.2.3.3 Errores Accidentales La primera condición el que en nuestro estudio de teoría de errores se basa en los errores accidentales. Estos errores se deben a las imperfecciones inevitables de nuestros sentidos, de los instrumentos y regularidades en la atmósfera. Los errores de tipo accidental actúan con signo positivo y negativo y tienen a compensarse. Los errores de tipo accidental se estudian a la luz de la teoría de las probabilidades. Ejemplo: El tirador, los errores de tipo accidental de la misma magnitud se presentan aproximadamente con la misma frecuencia. Errores accidentales de gran magnitud se presenta con poca frecuencia. Después de las mediciones generalmente se determina: a) El valor más probable en base a las mediciones hechas. b) El valor que señala la exactitud de cada observación. c) El valor que indica la exactitud del valor más probable. 3.2.2.3.3.1 Valor más Probable Para determinar el valor más probable de un conjunto de observaciones partimos del principio teórico que dice: En observaciones de igual precisión el valor más probable de las cantidades observadas es aquel para el cual la suma de los cuadrados de los residuos es un mínimo. Valor más Probable en Observaciones de Igual Peso. Calcular el valor más probable de observaciones de igual peso cuando una magnitud física se mide un cierto número de veces bajo las mismas condiciones. (Atmosféricas, el mismo 11 Topografía 1 observador etc.) Cada una de las observaciones nos merece la misma confianza es decir las observaciones tienen igual peso o ponderación. Sea M1, M2, M3... Mn la n observaciones de una magnitud. Sea X el valor más probable de las n Observaciones. (X-M1)²+(X-M2)²+(X-M3)²+...+ (X-Mn)² es un mínimo ==> 2(X-M1)+2(X-M2)+2(X-M3)+...+2(X-Mn)=0 ==> 2[(X-M1)+(X-M2)+(X-M3)+...+ (X-Mn)]=0 ==> nX-(M1+M2+M3+...+Mn)=0 ==> nX=M1+M2+M3+...+Mn M1+M2+M3+...+Mn Σ Mi [ Mi ] X = ------------------------------- = ---- ----- = ----------n n n La formula anterior nos dice que en el caso de observación de igual peso el valor más probable es el promedio aritmético. En el caso de observación de igual peso la suma de los residuos es igual a cero (0) [Vi] = 0 Valor Más Probable en Observaciones de Diferente Peso Suponemos a manera de ejemplo que un ángulo se midió 20 veces siendo los resultados. 1-El valor 93,420 gon apareció en 10 ocasiones 2-El valor 93,400 gon apareció en 8 ocasiones 3-El valor 93,600 gon apareció en 2 ocasiones Es evidente que el valor 93,420 nos merece 5 veces mayor confianza que el valor 93,600 a su vez este valor (93,600) nos merece 4 veces menor confianza que el valor 93,400. Podríamos decir que el peso de la primera observación es 5 veces mayor que el de la tercera observación el que a su vez es 4 veces menor que el de la tercera observación, el que a su vez es 4 veces menor que el de la segunda observación. Cualquier conjunto de números que guarden esa relación podrían ser los pesos de esos valores por ejemplo: 5,4, 1 ó podría ser 10, 8,2 ó 5/2,4/2,1/2 Conclusión Los pesos de un conjunto de observaciones son valores relativos. Es lógico pensar que al calcular el valor más probable de un conjunto de observaciones de diferente peso, las observaciones cuyo peso es mayor tengan mayor influencia que aquellas de peso menor. 12 Topografía 1 Es injusto calcular el valor más probable como un simple promedio aritmético. Sean M1, M2, M3, M4... Mn n = Observaciones P1, P2, P3, P4... Pn Los respectivos pesos X es el valor más probable. P1M1+P2M2+P3M3+...+PnMn ΣPiMi X = ----------------------------------------------- = ----------P1+P2+P3+...Pn [Pi] En el ejemplo anterior el promedio pesado es: 93.420*10 + 93.400*8 + 93.600*2 1868.600 X = ------------------------------------------------- = ---------------------- = 93.4300 10+8+2 20 El valor más probable en observaciones de diferente peso se llama promedio ponderado. En el caso de observaciones de diferente peso los residuos pesados sumados dan cero. [PiVi] = 0 3.2.2.3.3.2. Error Medio Cuadrático Al analizar un conjunto de datos no solo es útil determinar el valor más probable si no que es conveniente tener información respecto a: 1- El grado de variabilidad que tiene cada dato con respecto al valor más probable. 2- El grado de seguridad o de incertidumbre que tiene el mismo valor más probable. Se ha ideado por esas dos razones la forma de determinar criterios cuantitativos que nos informen sobre esos dos aspectos. Entre otras formas de obtener medidas de esos aspectos esta el error medio cuadrático que se define en función del error verdadero de la siguiente forma Error medio cuadrático m = +- ( [ εiεi ] / n ) Numero de observación (n) tiene una característica -----> Debido a que Exilon (ε) es un valor teórico es necesario encontrar formas practicas para representar el error medio cuadrático, en función de los Vi Error medio cuadrático de una observación cualquiera de igual peso. m = +- ( [ vivi ] / ( n-1 )) Error medio cuadrático del valor más probable para observaciones de igual peso. 13 Topografía 1 mx = +- m / n mx = +- ( [ vivi ] / ( n (n-1 ))) Estas formulas nos dan bastante aproximación el error medio cuadrático en observaciones de igual peso, los valores de m y mx serán tanto mejores conforme mayor sea n. 3.2.2.2.3.2.4. Error Medio Cuadrático en Observaciones de Diferente Peso. El error medio cuadrático para una observación de peso igual a la unidad. mo = +- ([vivipi] / (n-1)) Error medio cuadrático del valor más probable. mx = +- mo / [pi] mi = +- mo / pi 3.2.3. Sistema de unidades Para efectos de la topografía se utiliza el Sistema Internacional de Unidades. a) Unidades lineales. La unidad fundamental es el metro, por lo que todas las dimensiones, coordenadas y niveles se expresan en esa unidad, a menos que por alguna practica en contrario se tenga que recurrir a otras unidades. El metro (m) se subdivide a su vez en: 1 mm = 0.001m 1 cm = 0.01m 1 dm = 0.10m son las unidades que más se emplean en topografía 1 Km. = 1000 m b) Unidades de área, se refiere a la superficie de una determinada zona. Metro cuadrado m2, cm2, dm2, m2 la hectárea que es la unidad métrica en Europa y equivale a 10, 000 m2 y para grandes extensiones territoriales el km2 Centiárea = 1 m2 Área = 100 m2 Hectárea = 10,000 m2 Miriárea = 1’000,000 m2 Km2 = 1’000,000 m2 14 Topografía 1 Con fines de escrituración la superficie de un predio de 26, 548.625 m2, se representaría de la siguiente manera: 2 – 65 – 48.625 Has. ; Se lee como: 2 hectáreas, 65 áreas, 48.625 centiáreas c) Unidades de volumen, las unidades de volumen que se utiliza en México es el m3, Adicionalmente se emplean como unidades derivadas los millares o millones de metros cúbicos, esto sucede a menudo en el movimiento de tierras para la contabilización de los volúmenes de obra. D) Unidades angulares. La unidad de medida es el grado sexagesimal, la relación con otros sistemas de unidades es la siguiente: Sistema sexagesimal. La circunferencia es dividida en 360 partes. La unidad básica es el grado (°), que se subdivide en 60 minutos (60'), y el minuto se subdivide en 60 segundos (60"). Este sistema es el empleado casi exclusivamente en la práctica topográfica, Su uso es bastante generalizado, las correlaciones de las unidades de tiempo y de arco en astronomía (1 hora = 15°), y otras consideraciones, favorecen que continúe empleándose dicho sistema sexagesimal. Sistema centesimal. El uso de grados decimales en varios cálculos de ingeniería tiene ciertas ventajas. Esto condujo a la creación del sistema centesimal, en el cual la circunferencia está dividida en 400 partes, llamadas grados centesimales (g). Por tanto, 100g = 90°. El grado centesimal está dividido en 100 minutos centesimales (100c) y un minuto centesimal, en 100 segundos centesimales (100cc). Así, un ángulo puede expresarse como 236.4268g, donde el primer par de dígitos después del punto representa minutos centesimales, y el segundo par de dígitos, segundos centesimales. Sin embargo, la distinción entre minutos y segundos no requiere indicación explícita, como se observa en la siguiente suma de cantidades angulares, en la que puede apreciarse la sencillez del sistema centesimal. Este sistema tiene amplia aceptación en Europa. 15 Topografía 1 Ejemplo.- Determina la suma de los tres ángulos anotados. Solución: Sistema centesimal 100.4527 251.7590 312.0314 Suma = 664.2431 o bien 264.2431g Sistema sexagesimal 75°51'23" 207°18'41" 340°39'57" Suma = 623°50'01" o bien 263°50'01" Como algunos instrumentos de medición angular tienen sus círculos graduados en unidades centesimales, puede ser necesario efectuar conversiones entre los sistemas centesimal y sexagesimal. Si es necesario convertir un ángulo expresado en grados centesimales a su equivalente en grados sexagesimales, se multiplica aquel valor por 0.9 . Para efectuar la transformación inversa, de grados, minutos y segundos a grados centesimales, el valor, en decimales, del ángulo sexagesimal se divide entre 0.9 . Ejemplo.- ¿Cuál es el equivalente sexagesimal de 264.2431g ? Solución: 264.2431 x 0.9 = 237.81879° 0.81879° x 60 = 49.1274' 0.1274' x 60 = 7.644" Entonces, el valor sexagesimal es 237°49'07.644" Ejemplo.- ¿Cuál es el equivalente en grados centesimales de 263°50'01"? 16 Topografía 1 3.2.4. Medición de distancias y problemas de campo En topografía las mediciones lineales se han obtenido utilizando métodos muy diversos entre los cuales tenemos: 1. 2. 3. 4. 5. 6. 7. 8. 9. A pasos. Con odómetro Con telémetro. Por taquimetría (estadía). Por barra subtensa. Con cinta. Con instrumentos electrónicos para la medición de distancias.(IEMD) Método inercial. Sistema de satélites. 3.2.4.1 Medición a pasos Las distancias evaluadas a pasos son suficientemente exactas para muchos fines en topografía, ingeniería, geología, agricultura, en el servicio forestal y en reconocimientos militares. Las medidas a pasos se usan también para detectar equivocaciones de consideración que pueden ocurrir en mediciones de distancias hechas con métodos de mayor exactitud. Medir a pasos consiste en contar el número de pasos que abarcan una cierta distancia Primero debe determinarse la longitud del paso de la persona que va a recorrer la distancia. Esto se logra convenientemente recorriendo a pasos naturales, de ¡da y vuelta, una distancia horizontal medida con anterioridad, por lo menos de 100 M de longitud, y dividiendo la distancia conocida entre el número promedio de pasos. Para distancias cortas se necesita conocer la longitud de cada paso. La longitud del paso de un individuo varía al ir cuesta arriba o cuesta abajo y cambia con la edad. Para medir distancias largas puede portarse un instrumento de bolsillo llamado podómetro, que registra el número de pasos, o bien, puede recurrirse al pasómetro, que se fija al cuerpo o a una pierna y cuenta también el número de pasos. Medición a pasos es una de las técnicas más valiosas aprendidas en topografía, ya que tiene muchas aplicaciones prácticas y no necesita de equipo alguno. Los caminantes experimentados en la medición a pasos pueden medir distancias de 100 M, o incluso mayores con precisión de 1/50 a 1/100 de la distancia si el terreno es despejado y está más o menos a nivel. 3.2.4.2 Medición con odómetro Un odómetro convierte el número de revoluciones de una rueda de circunferencia conocida en una distancia. Las longitudes medidas con un odómetro instalado en un vehículo son adecuadas para ciertos levantamientos preliminares en los trabajos de ubicación de vías o caminos. Sirven como verificación aproximada de las medidas hechas mediante otros métodos. Existe otro tipo de ruedas medidoras que sirven para determinar distancias cortas, principalmente sobre líneas curvas. Los odómetros dan distancias que deben corregirse a la 17 Topografía 1 horizontal si el terreno tiene una pendiente pronunciada. Con los odómetros, es razonable esperar una precisión de aproximadamente 1 / 200 de la distancia. 3.2.4.3 Telémetros Estos instrumentos operan con base en los mismos principios que los medidores ópticos de distancias de las cámaras reflex de una sola lente. El operador mira a través de la lente y ajusta el foco hasta que un objeto distante quede enfocado en coincidencia, y entonces lee la distancia correspondiente. Estos instrumentos son capaces de lograr exactitudes de' 1 / 50 a distancias de hasta 50 M; sin embargo, la exactitud disminuye al aumentar la distancia. Los telémetros son adecuados para reconocimientos, elaboración de bosquejos y para comprobar o detectar errores en mediciones más exactas. 3.2.4.4 Taquimetría La taquimetría (estadía es el término más común usado en los Estados Unidos) es un método topográfico usado para determinar rápidamente la distancia horizontal y la elevación de un punto. Las mediciones con estadía se logran visando a través de un taquímetro o anteojo dotado de dos o más hilos reticulares horizontales, situados a una separación conocida. La longitud aparente interceptada entre los hilos superior e inferior se lee sobre un estatal graduado sostenido verticalmente en el punto distante. La distancia del taquímetro al estadal se determina por relaciones de proporción en triángulos semejantes. Se logra una precisión de 1 / 500 de la distancia teniendo el suficiente cuidado. 3.2.4.5 Métodos de la barra subtensa Este procedimiento indirecto para medir distancias incluye la lectura del ángulo subtendido por dos objetivos espaciados con precisión en una barra subtensa. En la figura se muestra una barra subtensa de metal invar. montada sobre un trípode (junto con un diagrama geométrico que aclara su uso). La barra se fija sobre un punto (B en la figura), nivelado con un nivel de burbuja, y se alinea perpendicularmente a la línea por medir mediante un visor colocado en su parte superior. Los puntos de mira fijos de la barra cerca de sus extremos están exactamente a una distancia de 2 m. Se mide el ángulo horizontal (x entre los puntos con un teodolito situado en otro punto (A en la figura) y se calcula la distancia horizontal. Las ecuaciones para el cálculo de las distancias horizontales se encuentran en la figura 1. Una característica importante del método de la barra subtensa es que siempre se obtiene la distancia horizontal, aunque se dirija una visual inclinada, pues el ángulo a mide en un plano horizontal. Para distancias o visuales de 150 M o menores, y usando teodolito de l", puede alcanzarse una exactitud de 1 / 3 000, o mayor aún.. 18 Topografía 1 BARRA SUBTENSA Figura No 1 3.2.4.6 Con instrumentos electrónicos para la medición de distancias.(IEMD) Medición de distancias con el Distomat Este instrumento está diseñado para la medición de distancias cortas. Con él se puede medir hasta 2,000 metros durante el día con un error estándar de 1 cm. independientemente de la distancia. Todo el sistema óptico emisor y receptor, puede montarse en un Teodolito del tipo wild T2. En el otro extremo de la línea por medir se coloca un reflector que regresa los rayos luminosos dependiendo de la distancia este reflector puede constar de un prisma (Para 600 M.) de tres prismas para 1,200 M.) Y de nueve prismas (Para 2,000 M.). El Distomat se dirige hacia el reflector con ayuda del telescopio procurando que reciba la emisión con la mayor intensidad. La distancia inclinada puede leerse en metros en la pantalla. 19 Topografía 1 Medida electrónica de distancias (MED) La medida electrónica de distancias (MED o EDM) está basada en las propiedades de una onda electromagnética propagada en el medio atmosférico, y en la medición de su fase. El instrumento que realiza esta medición es el distanciómetro, que generalmente va acoplado o incorporado dentro de la Estación Total, junto al anteojo. Para la medición de distancias el distanciómetro mide la longitud de terreno comparando una línea de longitud desconocida (nuestro lado a medir) con la longitud de onda conocida del rayo laser o energía electromagnética con la que trabajan. La medición electrónica de distancias queda definida entonces como una medición indirecta ya que la magnitud que en realidad medimos es el tiempo de viaje de una señal electromagnética, La rapidez para realizar las mediciones (unos segundos), la precisión y la posibilidad de medir a puntos inaccesibles hacen de la medición electrónica de distancias la más eficiente en los levantamientos topográficos. Estación Total Bastón Porta Prisma Prisma Reflejante 20 Topografía 1 3.2.5. Accesorios de la cinta Figura No 2 EQUIPO PARA MEDIR UNA CUADRILLA DE CADENAMIENTO El equipo es el siguiente: a) Cintas para ingenieros y topógrafos. b) Cintas de tela o metálicas. c) Balizas o agujas. d) Nivel de mano. e) Jalones. f) Plomadas. La Plomada Existen 2 tipos de plomadas: la plomada física y la plomada óptica. La plomada física es una pesa de plomo o bronce, cilíndrica o cónica, colgada de una cuerda. Cuando la plomada está estática, suspendida por un hilo, éste tiene por definición, la dirección vertical y así sirve para determinar en el suelo la proyección horizontal de un punto que está a cierta altura. Las más usadas en topografía son las de 16 oz. 21 Topografía 1 La plomada óptica consiste en un ocular que dispone el goniómetro, y mediante un prisma de reflexión que lleva interno, desvía la visual de forma que esta coincide con el eje vertical del aparato. Antiguamente se utilizaba para estacionar el goniómetro la plomada física; actualmente se usa la plomada óptica. Cuando se acaba el estacionamiento el centro de la señal debe quedar en coincidencia con el centro de la señal del ocular de la plomada. La Estaca Las estacas se hacen de madera trabajada o se cortan de los árboles. En los trabajos de topografía, éstas fuertes estacas se clavan firmemente en el terreno para marcar los extremos de alineación, que son con frecuencia vértices de ángulos. En las estacas se clava una tachuela o un clavito para indicar el punto exacto del vértice. La Almádana La almádana es un mazo de hierro con un mango largo de madera. Su utiliza para clavar las estacas firmemente en el terreno. La Cinta Métrica Las cintas que se usan en la actualidad para medir, están hechas de diferentes materiales, longitudes y pesos. Las más comunes son las de tela y las de acero. Diferentes tipos de cintas, que pueden ser: a) Cintas de acero b) Cintas de lienzo c) Cintas de nylon d) Cintas de fibra de vidrio e) Cintas de acero cubiertas con polímero f) Cintas de acero invar 22 Topografía 1 Las primeras son de material impermeable y llevan un refuerzo de delgados hilos (cuatro, seis u ocho hilos) de acero o bronce para impedir que se alarguen demasiado con el uso. Generalmente vienen de 10, 20 o 30 m y su ancho es de 5/8 de pulgada. Las cintas de tela no se emplean para levantamientos de mucha precisión o cuando los alineamientos son muy largos, pues con el uso se estiran. Se debe tener el cuidado de dejar secar la cinta, antes de colocarla de nuevo en la caja, cuando por efectos del trabajo se haya humedecido. Igualmente, al enrollarla se debe hacer pasar por los dedos, índice y medio, manteniendo éstos cerca de la ranura para evitar que la cinta entre torcida en la caja y se atasque. Las cintas de acero son las que se usan casi exclusivamente por su exactitud en las medidas. Las cintas metálicas corrientes consisten en una lámina o fleje de acero de 25 o 30 m de longitud. Son un poco más angostas que las de tela; ¼” y 5/16” son los anchos más comunes. Su grueso y el tratamiento de temple que reciben hacen que puedan enrollarse o desenrollarse con facilidad. También puede haber cintas mayores de 50 y 100 m. Las no métricas tienen comúnmente 50 pies (15.240 m), 100 pies (30.480 m) y 200 pies (60.960 m), aunque también las hay de longitud mayor. Algunas cintas de acero están graduadas en su totalidad en pies, décimas y centésimas. En otras sólo está graduado en décimas o en décimas y centésimas el pie final o un pie adicional colocado en uno de los extremos. 3.2.5.1 Pasos para medir con cinta 1. 2. 3. 4. 5. 6. Alineación Estiramiento Aplome Marcaje Lectura Anotación 3.2.5.1.1 Alineación La línea por medir empleando balizas debe marcarse en forma bien definida en ambos extremos, y también en puntos intermedios, si fuera necesario, para asegurarse que no hay obstrucciones a las visuales. El cadenero de adelante se alinea en su ubicación por la del cadenero de atrás (o con ayuda de un teodolito o tránsito, para mayor exactitud). Las indicaciones se dan a voces o mediante señales con las manos. 23 Topografía 1 3.2.5.1.2 Estiramiento El cadenero de atrás sostiene el extremo con la marca de 30 M de la cinta sobre el primer punto (el de partida), y el cadenero de adelante, que sostiene el extremo con la marca cero, es alineado por aquél. Para tener resultados exactos, la cinta debe estar en línea recta y los extremos sostenidos a la misma altura, Se aplica entonces una tensión específica, generalmente de entre 10 y 25 lb. Para mantener una fuerza uniforme, cada cadenero se enrolla en la mano la tira de cuero que llevan los extremos de la cinta, mantiene los antebrazos pegados al cuerpo y se sitúa mirando al frente en ángulo recto con la línea. En esta posición, el cadenero queda fuera de la línea visual. En estas condiciones sólo necesita inclinar un poco el cuerpo para sostener, disminuir o aumentar la tensión. Es difícil mantener una fuerza constante con los brazos extendidos, si no es que imposible, en el caso de aplicar una tensión de 15 lb o más. La buena comunica entre los cadeneros de atrás y adelante evitará tirones o saltos de la cinta, ahorrará tiempo y conducirá a mejores resultados. 3.2.5.1.3 Aplome La maleza, los arbustos, los obstáculos y las irregularidades del terreno pueden hacer imposible tender la cinta sobre el terreno. En vez de ello, los cadeneros marcan cada extremo de una medida colocando el hilo de una plomada con graduación respectiva de la cinta y asegurándolo con el pulgar. El cadenero de atrás tiene la plomada sobre el punto fijo mientras el cadenero de adelante marca la cinta. Al medir una distancia de menor longitud que la de la cinta, el cadenero de adelante llevará el hilo de la plomada hasta el punto de la cinta que quede sobre la marca del terreno. 3.2.5.1.4 Marcaje Una vez que la cinta se ha alineado y tensado correctamente, y el cadenero de atrás está sobre el punto, vocea la señal de "listo". El cadenero de adelante va entonces con una baliza exactamente en oposición a la marca cero de la cinta y grita la señal de "marcado". El punto en el que se clavó la baliza en el terreno se verifica repitiendo la medición, hasta estar seguro de su ubicación correcta. Después de confirmar la medida, el cadenero de adelante da la señal de terminado; el cadenero de atrás saca entonces la baliza del primer punto marcado y ambos caminan hacia adelante. El cadenero de adelante arrastra la cinta, mide a pasos aproximadamente 30 M y se detiene. Un poco antes de que el extremo con la marca de 30 M llegue al segundo punto que se marcó, el cadenero de atrás vocea la señal de "alto" para informar al de adelante que ya se han recorrido los 30 M. Se repite este procedimiento de medición de longitudes de 30 M hasta que se tiene que medir una distancia menor que la longitud de la cinta al llegar al final de la línea. 24 Topografía 1 3.2.5.1.5 Lectura Existen dos tipos comunes demarcado de graduaciones en las cintas de 30 M para topografía. Es necesario determinar el tipo de cinta de que se trate antes de iniciar el trabajo, pues así se evita el cometer repetidas equivocaciones de 1 M. El tipo más común de cinta tiene una longitud graduada total de 31 m. Este tipo de cinta está graduada de 0 a la marca final (30 M) en tramos de una unidad y tiene un tramo adicional al otro lado del cero. Graduado de 0 a 1 M en subdivisiones decimales. 3.2.5.1.6 Anotación Un trabajo preciso de campo puede estropearlo las anotaciones hechas sin cuidado. Si bien los procedimientos de medición con cinta son, al parecer, relativamente sencillos, es difícil obtener a partir de ellos alta precisión, especialmente cuando los utilizan los principiantes. La técnica de la medición con cinta es una habilidad que puede enseñarse y aprenderse mejor por demostraciones directas y prácticas de campo. 3.2.6 Precisiones de las mediciones con cinta En levantamientos que no exigen mucha precisión, se procura (a ojo) mantener horizontal la cinta (aunque es mejor obtenerlo por medio de un nivel Locke), usar la plomada para proyectar los extremos de la cinta sobre el terreno, y aplicar una tensión conveniente (a estimación). No se acostumbra hacer correcciones por catenaria, temperatura o tensión. Generalmente, el grado de precisión que se obtiene varía de l/l.000 a 1/2.500. En la mayor parte de los casos, la longitud de las líneas medidas resulta mayor que la real, pues los errores de mayor magnitud tienden a hacer más corta la cinta. Sí la medición se efectúa sin aplicar la tensión suficiente y cuando los cadeneros no son muy expertos en mantener dentro de límites razonables la horizontalidad de la cinta, la precisión puede rebajarse hasta 1/500. En un terreno plano y continuo se puede obtener perfectamente una precisión de 1/5.000, la cual se considera buena. Midiendo sobre una superficie lisa, un terreno pavimentado, se puede esperar una precisión de 1/10.000, que es la mayor que se puede lograr sin ayuda de instrumentos topográficos. Para los levantamientos que exigen un máximo de precisión, se emplean dinamómetros y termómetros para controlar la tensión y la temperatura de la cinta durante la medición, y efectuando todas las correcciones del caso, puede esperarse una precisión hasta de 1/20.000 Medición en terreno horizontal Se requiere de dos operadores llamados cadeneros quienes se auxiliaran de las balizas haciendo punterías con ellas para definir una línea recta y evitar error por mala alineación. El cadenero de atrás es que pone en ceros la cinta, el cadenero de adelante debe ser el más experimentado, es quien lee la cinta, alineándola, poniéndola horizontal y aplicando una tensión constante, para el caso de una cinta de 30 m, esta tensión debe ser de 5 kg para evitar el error por catenaria (columpio). 25 Topografía 1 Medición en terreno inclinado En el caso de un terreno inclinado, conviene clavar trompos (pequeñas estacas de madera) o fichas a lo largo de la línea por medir, de manera que el desnivel entre dos puntos consecutivos, permita poner horizontal la cinta empleando las plomadas. La suma de las distancias parciales entre puntos de la alineación, dará como resultado la distancia total. 26 Topografía 1 Ejemplo 1 Se midió una distancia con los mismos instrumentos y técnicas varias veces, dando los siguientes resultados: D1 = 123.552 producto de 3 mediciones D2 = 123.549 producto de 3 medición D3 = 123.564 producto de 5 mediciones D4= 123.560 producto de 7 mediciones D5 = 123.555 producto de 6 mediciones Hallar la distancia más probable y el error medio cuadrático de ese valor más probable y de cada una de las observaciones. No. 1 2 3 4 5 Observaciones (mi) en Metros 123.552 123.549 123.564 123.560 123.555 Pesos (Pi) 3 3 5 7 6 Error residual (vi) en milímetros +5.0 +8.0 -7.0 -3.0 +2.0 ∑= 24 P1M1+P2M2+P3M3+...+PnMn ΣPiMi X = ----------------------------------------------- = ----------P1+P2+P3+...Pn [Pi] X = 123.557 M Error Medio Cuadrático en Observaciones de Diferente Peso. El error medio cuadrático para una observación de peso igual a la unidad. mo = +- ([vivipi] / (n-1)) mo = +- 12 mm Error medio cuadrático del valor más probable. mx = +- mo / [pi] mx = +-2 mm mi = +- mo / pi 27 vipi +15 +24 -35 -21 +12 vivipi 75 192 245 63 24 ∑= 4 ∑= 599 Topografía 1 m1= +-6.9 mm m2= +-6.9 mm m3= +-5.4 mm m4= +-4.5 mm m5= +-4.9 mm Ejemplo 2 Se midió un Angulo con los mismos instrumentos y técnicas varias veces, dando los siguientes resultados: α1 = 40 º 10’ 17’’ producto de 8 mediciones α2 = 40 º 10’ 18’’ producto de 4 mediciones α3 = 40 º 10’ 20’’ producto de 12 mediciones α4 = 40 º 10’ 21’’ producto de 8 mediciones Hallar el Angulo más probable y el error medio cuadrático de ese valor más probable y de cada una de las observaciones. No. Observaciones (mi) en º ’ ’’ 1 2 3 4 Pesos (Pi) 28 Error residual (vi) en ’’ vipi vivipi Topografía 1 3.2.7 La Brújula Una brújula consta básicamente de una aguja de acero magnetizada, montada sobre un pivote situado en el centro de un limbo o circulo graduado. A menos que sea alterada por una atracción local, la aguja apunta hacia el norte magnético (en el hemisferio norte). En 1990, los polo, magnéticos norte y sur tenían aproximadamente las siguientes coordenadas: 77ºN, 102º W y 65º S, 140' E, respectivamente, los cuales se mueven constantemente. Las líneas de fuerza magnética terrestre que alinean la aguja atraen un extremo de ésta y la hacen quedar hacia abajo de la posición horizontal. El ángulo de esta inclinación magnética varía de 0º en el Ecuador a 90º en los polos magnéticos. Para compensar en el hemisferio norte el efecto de la inclinación y mantener horizontal la aguja, se colocan en su extremo sur, a manera de contrapeso, unas vueltas de alambre muy delgadas. Puede ajustarse la posición de este contrapeso para adaptarla a la latitud a la que se use la brújula. Los contrapesos de las brújulas de los tránsitos se ajustan para una latitud media de 40º N; por lo general no tienen que cambiarse de posición para ningún lugar en Estados Unidos, excepto Alaska. Al girar la caja de la brújula, la aguja continúa apuntando al norte magnético y da una lectura que depende de su posición respecto del círculo graduado. Figura No 3 BRUJULA DE MANO 29 Topografía 1 3.2.8 Definiciones 3.2.8.1 Rumbo Los rumbos representan un sistema para designarlas direcciones líneas. El rumbo de una línea es el ángulo agudo horizontal entre un meridiano de referencia y la línea. El ángulo se mide ya sea desde el Norte o desde el Sur, y hacia el Este o el Oeste, y su valor no es mayor de 90º. El cuadrante en el que se encuentra se indica comúnmente con la letra N o la S precediendo al valor numérico del ángulo, y la letra E o la W, después de dicho valor. Así, la expresión correcta de un rumbo debe incluir 1etras del cuadrante y un valor angular; por ejemplo: N80ºE. En la figura 4, todos los rumbos en el cuadrante NOE se miden en sentido de las manecillas, a partir del meridiano. Así, el rumbo de la línea OA es N70ºE. Todos los, rumbos del cuadrante SOE se miden en sentido opuesto y a partir del meridiano; así, el rumbo de OB es S35ºE. De modo semejante, el rumbo de OC es S55ºW y el de OD es N30ºW. Figura No 4 30 Topografía 1 Los rumbos verdaderos se miden a partir del meridiano geográfico local; los rumbos magnéticos, desde el meridiano magnético local; los rumbos supuestos, a partir de cualquier meridiano adoptado, y los rumbos de cuadrícula a partir del meridiano apropiado cuadricula. Los rumbos magnéticos pueden determinarse en el campo, observando la aguja de una brújula y utilizando los ángulos medidos para lograr los rumbos calculados. En la figura 5, supóngase que se leyó una brújula sucesivamente en los puntos A, B, C y D, midiendo directamente los rumbos de las líneas AB, BA, BC, CB, CD y DC. A los rumbos AB, BC y CD se les llama rumbos directos y a los de BA, CB y DC, rumbos inversos. Los rumbos directos (o hacia adelante) tienen el mismo valor numérico que los inversos (o hacia atrás), pero corresponden a cuadrantes opuestos. Si el rumbo de AB es N 44ºE, el de BA es S 44º W. En topografía, el término registro del rumbo se refiere a aquél citado en un levantamiento previo, y rumbo verdadero se refiere a uno utilizado en una descripción de escrituración de propiedad. Figura No 5 3.2.8.2 Acimut Es un ángulo horizontal medido en sentido de las manecillas desde cualquier meridiano de referencia. En topografía plana, el acimut se mide generalmente a partir del Norte, pero a veces se usa el Sur como dirección de referencia (por ejemplo, en algunos trabajos astronómicos, militares y del National Geodetic Survey). Como se muestra en la figura 6, los ángulos acimutales varían de 0 a 360º y no necesitan letras para identificar el cuadrante. Así, el acimut de OA es 70º; el de OB, 145º; el de OC, 235º y el de OD, 330º. Para evitar confusiones es necesario indicar en las notas de campo, al comienzo del trabajo, si los acimut van a medirse a partir del Norte o del Sur. Los acimut pueden ser verdaderos, magnéticos, de cuadrícula o supuestos, dependiendo del meridiano que se utilice. También pueden ser directos o inversos. Los directos (o hacia adelante) se convierten en inversos (o hacia atrás), y viceversa, sumando o restando 180º. Por ejemplo, si el acimut de OA es 70º, el de AO es 70º + 180º = 250º. Si el acimut de OC es 235º, el de CO es 235º - 180º = 55º. 31 Topografía 1 Los acimutes pueden leerse directamente en el círculo graduado de un instrumento de estación total, de un teodolito repetidor (o tránsito) después de haber orientado adecuadamente el instrumento. Figura No 6 3.2.8.3 Declinación magnética La declinación magnética es el ángulo horizontal comprendido entre el meridiano magnético y el meridiano geográfico verdadero. A veces, en la navegación a este ángulo se le llama variación magnética; en algunos, servicios militares se usa el término desviación magnética. Se tiene una declinación Este cuando el meridiano magnético está al oriente del norte verdadero, y una declinación Oeste si está al poniente del norte verdadero. El valor de la declinación en cualquier sitio en particular puede determinarse (si no hay atracción local) definiendo un meridiano verdadero mediante observaciones astronómicas y leyendo la brújula mientras se visa a lo largo del meridiano verdadero. A un mapa que muestre declinaciones magnéticas de un lapso específico se le llama mapa isogónico. En tales mapas, las líneas que unen puntos con la misma declinación se llaman líneas isogónicas. A la línea que une los puntos de declinación cero se le llama línea agónica; sobre ésta, una brújula señala el norte verdadero a la vez que el norte magnético. 32 Topografía 1 La variación secular para intervalos más largos tiene que calcularse a partir de tablas que retroceden hasta tiempos remotos que puedan tener significación en ciertos problemas. La mejor manera de determinar la declinación magnética en un lugar dado y en cualquier fecha es mediante una observación astronómica o el uso de líneas de control aún existentes. Si esto no es posible, puede determinarse una declinación aproximada recurriendo a un mapa isofónico. Los problemas comunes de los levantamientos hechos con brújula necesitan de la conversión de rumbos verdaderos a rumbos magnéticos, de magnéticos a rumbos verdaderos, y de rumbos magnéticos a rumbos magnéticos, considerando las declinaciones existentes en diferentes fechas. Ejemplo Supóngase que en 1862 se midió el rumbo magnético de un lindero y que fue de S43º30' E la declinación magnética en el lugar del levantamiento era de 3º15'W. Se pide calcular rumbo verdadero para efectuar una subdivisión de la propiedad. Solución Un esquema similar al de la figura 7 aclara la relación, y el utilizarlo debe volverse una costumbre por parte de los principiantes a fin de evitar errores. El norte verdadero se indica con una flecha con punta completa, y el norte magnético mediante una flecha más con media punta. Se ve que el rumbo verdadero es S43º30'E + 3º15’ = S46º45'E. Utilizar lápices de diferentes colores para señalar las direcciones del norte verdadero, el e magnético y las Líneas del terreno, ayuda a hacer más claro el esquema Figura No 7 33 Topografía 1 3.2.8.3.1 Variaciones de las declinaciones magnéticas Hemos afirmado que la declinación magnética en cualquier punto varía con el tiempo. Las variaciones pueden clasificarse como seculares, diarias, anuales e irregulares, y a continuación se describe cada una de éstas. 3.2.8.3.1.1 Variación secular A causa de su magnitud, ésta es la variación más importante. Desafortunadamente, no se ha encontrado ninguna ley general ni fórmula matemática para predecir a largo plazo esta variación, y su comportamiento pasado sólo puede, describirse, utilizando tablas detalladas y gráficas logradas por observaciones. Los registros llevados en Londres durante cuatro siglos muestran un intervalo de variación en la declinación magnética que va desde 1 lº E en 1580, a 24º W en 1820 y regresando a 5º W en 1985. La variación secular cambió la declinación magnética en Baltimore, Marylanl., de5º 11’W en 1640 a 0º 35'W en 1800, 5ºl9'W en 1900, 7º25'W en 1950, 8º43'W en 1975 y 10º 20'W en 1990 (con un cambio anual de 4.7ºW). Cuando se trata de volver a marcar antiguos linderos o líneas de propiedad determinados por brújula o basados en el meridiano magnético, es necesario tomar en consideración la diferencia de declinación magnética entre el momento del levantamiento original y la fecha en que se vuelven a trazar los límites. Por lo general, la diferencia se debe ante todo a la variación secular. 3.2.8.1.1.2 Variación diaria La variación diaria de la declinación magnética hace que la aguja gire un arco que, en promedio, aproximadamente de 8' en Estados Unidos. La aguja alcanza su posición extrema hacia el Este alrededor de las 8:00 A.M., y su lectura más hacia el Oeste alrededor de la 1:30 P.M. La declinación media ocurre alrededor de las 10:30 A.M. y de las 8:00 P.M. Estas horas y la magnitud de la oscilación diaria cambian con la latitud y la estación del año, pero la total omisión de la variación diaria de la aguja esta completamente dentro del intervalo de error que es de esperar en las lecturas de la brújula. 3.2.8.1.1.3 Variación anual Esta oscilación periódica es menor de 1’ de arco y puede ignorarse. No debe confundirse con el cambio anual (la parte del cambio de la variación secular que corresponde a un año) que se indica en algunos mapas isogónicos. 3.2.8.1.1.4 Variaciones irregulares Ciertas perturbaciones y tormentas magnéticas impredecibles pueden ocasionar variaciones irregulares a corto plazo, de un grado o mayores. 34 Topografía 1 3.2.8.4 Atracción local El campo magnético es afectado por objetos metálicos y por la corriente eléctrica directa o continua; ambas causas dan origen a atracciones locales. Por ejemplo, si se colocara una brújula junto a un tranvía con líneas de energía eléctrica la aguja apuntaría hacia el carro conforme éste se acerca y lo seguiría hasta que fuera de su alcance. La fuente de la perturbación artificial es fija, todos los rumbos tomados desde una estación dada serán erróneos por una misma cantidad. Sin embargo, los ángulos calculados a partir de los rumbos tomados en la estación serán correctos. Existe una atracción local cuando los rumbos directo e inverso de una línea difieren una cantidad mayor que los errores normales de observación. Considérense los siguientes rumbos leídos para una serie de líneas: AB BA BC CB N24º15’W S24º10'E N76º40'W S76º40'E CD DC DE ED N60º00’E S61º15'W N88º35'E S87º25'W Los rumbos AB directo y BA inverso concuerdan razonablemente, lo cual indica que no existe Atracción local en A o en B, o que es muy pequeña. Lo mismo puede decirse del punto C. Sin embargo, los rumbos tomados en D difieren de los correspondientes tomados en C y en E, Aproximadamente en 1º15' hacia el noroeste. Por tanto, existe una atracción local en el punto D que desvía la aguja de la brújula 1º15’ hacia el noroeste. Es evidente que para detectar una atracción local tienen que ocuparse todas las estaciones sucesivas de un levantamiento hecho con brújula y tomarse los rumbos directo e inverso, aun cuando puedan determinarse las direcciones de todas las líneas situando el instrumento solamente en estaciones alternadas. Ejemplo: Levantamiento de un lote con Brújula y Cinta Generalmente se traza una poligonal inscrita o circunscrita en el lote, se mide la longitud de cada lado y, en cada vértice o estación, el rumbo o azimut atrás y el rumbo azimut adelante, para detectar si hay atracción local y corregirla. Cuando en una estación hay atracción local, el error en la lectura atrás como en la lectura adelante será el mismo, y si en los puntos extremos de una recta AB, la lectura adelante en A tiene el mismo valor de la lectura atrás en B (en el caso de rumbos), o difieren en 180° (en el caso de azimutes), es probable que no haya atracción local en esos dos puntos. A continuación se da un ejemplo de un levantamiento con brújula y cinta, la manera de ajustar y de corregir la atracción local. 35 Topografía 1 Estación Punto Observado A D B B C D Distancia (M) 106.30 Rumbos Observado S 60˚ 49’ E N 52˚ 00’ E A C 41.00 S 52˚ 40’ W S 29˚ 45’ E B D 76.90 N 29˚ 45’W S 31˚ 41’W C A 71.30 N 32˚ 02’E N 61˚ 00’W 36 Angulo Calculado Angulo Corregido Rumbo Corregido Topografía 1 3.2.9 Métodos de Medida de Ángulos. Suponemos que tenemos un teodolito controlado y ajustado, el cual nos servirá para medir ángulos. Diremos que mediremos un ángulo cuando tenemos dos puntos con vértice en la estación. Cuando tenemos varios puntos diremos que estamos midiendo direcciones. o . .A . A B . O . B .C . p . p .D Por ejemplo. Si tenemos 4 direcciones, nos interesan 3 ángulos como mínimo. Dirección. Es el valor angular a partir del origen (o) Angulo. Es la diferencia entre 2 direcciones 3.2.9.1 Medida de un ángulo en una serie simple. Este es el único método en el cual no se hace vuelta de campana, es utilizado en la taquimetría convencional. Serie simple (pasos). Puntería Izquierda (1) entonces lectura L1 (I) Puntería Derecha (2) entonces lectura L2 (I) α = L2 - L1 1 . L1 2 . L2 .A 37 Topografía 1 3.2.9.2 Medida de ángulo con 2 o más series simples Significa medir la primera serie simple Puntería Izquierda (1) entonces lectura L1 (I) Puntería Derecha (2) entonces lectura L2 (I) Al terminar la primera serie y antes de comenzar la otra, intercalamos un giro de 90 grados en el limbo y realizamos la segunda serie Puntería Izquierda (1) entonces lectua L1 (I) Puntería Derecha (2) entonces lectura L2 (I) Hasta aquí hemos realizado 2 series simples, para efectuar más de 2 series simples, al finalizar cada una intercambiamos un giro de 180 grados/ n, donde n es el numero de series simples. 3.2.9.3 Medida de ángulo en 1 o más series completas. En este método entramos a medir ángulos en dos posiciones. 1 . L1 (I) L1 (II) 2 . L2 (I) L2 (II) . A Pasos Puntería Izquierda (1) posición I entonces lectura L1 (I) Puntería Derecha (2) posición I entonces lectura L2 (I) Vuelta de campana y giro de 180 grado Puntería Derecha (2) posición II entonces lectura L2 (II) Puntería Izquierda (1) posición II entonces lectura L1 (II). Hasta aquí hemos completado una serie completa, ahora, si queremos realizar más series completas debemos intercalar el limbo un giro de 180 grados/n, al finalizar cada serie completa, donde n es el numero de series completas. 38 Topografía 1 3.2.9.4 Teodolito de Repetición Los Teodolitos repetidores permiten fijar el limbo en la parte superior o en la parte inferior, este método se emplea para usar al máximo el instrumento. Consiste en una adición mecánica del ángulo medido repetidas veces en el propio limbo horizontal del instrumento. Este método solo se puede hacer entre dos direcciones. 3.2.9.5 Teodolito de Reiterador. Son aquellos teodolitos en que el círculo horizontal permanece fijo durante una serie de observaciones. Se hacen varias series de observaciones, conocido el circulo horizontal entre una y otra serie para qué las lecturas se hagan sobre las diferentes partes del circulo graduado. Estos instrumentos dan una precisión mucho mayor que los teodolitos repetidores, son teodolitos normalmente al segundo. 39 Topografía 1 4- El Teodolito 4.1 Introducción histórica El Teodolito fue construido en 1730 por el mecánico ingles Sisson, instrumento principalmente usado para medir ángulos horizontales y verticales para medir distancias por taquimetría o con la estadía y para trazar alineamientos rectos. Existe en el mercado una gran variedad de teodolitos de diferentes marcas entre las cuales podemos mencionar Wild, Kern, Zeiss. Estos instrumentos se dividen en 2 grupos de acuerdo con la exactitud de sus lecturas en teodolitos de 1” y teodolitos de 1’. Teodolitos de 1’ que permiten la lectura de grados, minutos y segundos, en algunos de estos instrumentos puede leerse hasta fracción de segundo. Teodolito de 1’ que permite leer grados y minutos y en algunos casos segundos. La diferencia entre estos dos tipos de instrumentos radica principalmente en las características ópticas, el grado de amplificación y el sistema de lectura. De acurdo a sus ejes en teodolito repetidor y en teodolito reiterador. Teodolito de Repetición Este método solo se puede hacer entre dos direcciones. En estos teodolitos se puede acumular lecturas sucesivas del circulo horizontal, que se divide después por el número de repeticiones (veces) en que se ha medido un ángulo. Este teodolito es normalmente al minuto. Teodolito de Reiterador Son aquellos teodolitos en que el círculo horizontal permanece fijo durante una serie de observaciones. Se hacen varias series de observaciones, conociendo el círculo horizontal entre una serie y la otra serie para que las lecturas se hagan sobre las diferentes partes del círculo graduado. Estos instrumentos dan una precisión mucho mayor que los teodolitos repetidores, son teodolitos normalmente al segundo. 40 Topografía 1 4.2 Partes constitutivas fundamentales El eje principal “pp”_ está definido por el eje mecánico que pasa por el centro del instrumento, alrededor del cual gira la parte superior del instrumento. Eje secundario “ss” está definido por el eje mecánico alrededor del cual gira el anteojo. Eje de colimación “cc” está definido por el centro del retículo y el centro del objetivo. 4.2.1 Manejo y emplazamiento de un teodolito Los teodolitos deben sacarse cuidadosamente de sus estuches de transporte, tomándolos de los soportes de el anteojo (horquilla) y debe atornillarse el instrumento hasta asegurarlo al trípode mediante un tribracos o base tripoidal. 41 Topografía 1 El trípode con el instrumento se sitúa o emplaza sobre el punto del terreno. Los principiantes pueden usar una plomada para acercar el instrumento a la posición deseada. El centrado exacto sobre el punto se realiza utilizando una plomada óptica, la cual proporciona una línea visual dirigida hacia abajo y colineal con el eje acimutal del teodolito. El instrumento debe estar nivelado para que la plomada óptica defina una línea vertical. La mayoría de los tribracos de los teodolitos tiene un nivel circular de burbujas que es relativamente inestable, para facilitar la nivelación preliminar aproximada antes de comenzar a efectuar la nivelación final con el nivel de burbujas o de aliada (nivel tubular). Algunos tribracos contienen también una plomada óptica. El proceso de emplazamiento en un punto de un instrumento con plomada óptica, montaje de tribracos con burbuja esférica y trípode de patas ajustables, se hace conveniente de la siguiente manera: 1. Ajuste la posición de las patas del trípode levantando y moviendo el instrumento en conjunto hasta que el punto este cerca de la visual de la plomada óptica. 2. Asiente las patas y centre la burbuja ajustando las longitudes de las patas del trípode (el punto seguirá estando cerca de la visual de la plomada óptica). 3. Nivele el instrumento usando la burbuja de alidada y los tornillos niveladores (tornillos calantes). 4. Afloje el tornillo del tribraco y traslade el instrumento (no lo gire) hasta que los hilos reticulares de la plomada queden exactamente sobre el punto. Repita los pasos 3 y 4 hasta lograr un centrado y nivelado perfecto. Se dijo antes que los teodolitos tienen una base nivelante de 3 tornillos y un nivel de burbuja de alidada. Para nivelar el instrumento se coloca este nivel paralelo a la línea que pasa por dos tornillos niveladores cuales quiera. Se centra la burbuja haciendo girar estos dos tornillos, luego se gira a 90° grados como se indica en la segunda figura y se centra de nuevo usando solamente el tornillo que no ha usado. Se repite este procedimiento y se verifica cuidadosamente para asegurarse que la burbuja permanezca centrada. 42 Topografía 1 4.3 Condiciones de ajuste del Teodolito El eje principal “p-p” perpendicular al eje secundario “s-s”. El eje de colimación “c-c” perpendicular al eje secundario “s-s”. Como “c-c” es perpendicular a “s-s” y “c-c” gira alrededor de “s-s”. El “c-c” define un plano perpendicular a “s-s”. Ahora si “p-p” es vertical y como “p-p” es perpendicular a “s-s” concluimos que “s-s” es horizontal y en base a lo anterior, el plano definido por “c-c” es vertical al girar el anteojo. 4.3.1 Control y ajuste del eje de colimación Pasos: 1) Estacionamos el instrumento en cualquier punto. 2) Hacer puntería sobre un punto A distante a unos 100m y a la misma altura del instrumento y hacer lectura A1, sobre el limbo horizontal. 3) Hacer vuelta de campana y hacer nueva puntería sobre el punto A y hacer la lectura A2. Si se cumple que A2=A1 ± 180°, el eje de colimación es perpendicular al eje secundario (esta ajustado). Si lo anterior no se cumple significa que el eje de colimación no está ajustado y la diferencia entre A1± 180° y A2 nos da el error del eje de colimación duplicado. 4) Para ajustar el eje de colimación llevamos la alidada a la lectura Ao=½(A2+A1 ± 180°), es decir al promediar las lecturas, de esta manera el retículo se saldrá del punto A, mediante el tornillo de ajuste del eje de colimación desplazamos el retículo hasta llevarlo sobre el punto A. 5) Repetir de 1-3 como control. De lo anterior concluimos que midiendo en dos posiciones una dirección, al promediar las lecturas se elimina la influencia del error del eje de colimación. La posición I del instrumento se identifica al tener el limbo vertical a la izquierda. La posición 2 tiene el limbo vertical a la derecha. 43 Topografía 1 4.3.2 Control y Ajuste del Retículo Pasos: 1) Hacemos puntería en un punto cualquiera (lejano para que aparezca como punto, siempre que se facilite la puntería) con el hilo vertical. 2) Se inclina el anteojo con el tornillo de movimiento fino. Si el punto se mantiene sobre el hilo vertical que esta ajustado. Si el punto se sale del hilo vertical el retículo esta desajustado. 3) Para corregir este error se gira la placa del retículo hasta reducirlo a la mitad de la distancia entre el hilo y el punto. 4) Se baja el anteojo y se lleva el punto sobre el hilo con el movimiento fino horizontal. Se repiten los pasos anteriores como control. 4.3.3 Control y ajuste del Eje Secundario Pasos: 1) Estacionamos el teodolito cerca de un edificio o una pared en la que haya un punto A bien definido y a bastante altura sobre el suelo, se nivela el teodolito con todo cuidado. 2) Se hace puntería sobre el punto A y estando apretados los tornillos de sujetacion horizontal, se baja el anteojo hasta tomar un punto B en el suelo o a muy poca altura. 3) Se da vuelta de campana al anteojo y se gira el instrumento en 180’ y hacemos puntería nuevamente sobre el punto A. 4) Se baja otra vez el anteojo y si la visual vuelve a pasar por B, es señal de que el eje secundario es perpendicular al eje principal (esta ajustado): Si la visual no pasa por B, se toma un punto C que está situado en ella y al lado de B. El punto medio D. de la distancia BC estará en un mismo plano vertical con A. 44 Topografía 1 5) Se mira Hacia D, se alcanza el anteojo hasta que la visual pase cerca del punto A, se inclina el eje secundario hasta que la visual coincida con el punto A. Se repiten los pasos anteriores como control. La influencia del error del eje secundario se elimina midiendo en 2 posiciones. 4.4 Diferencias ente Tránsitos y Teodolitos. El transito y el teodolito es equivalente y pueden desempeñar básicamente las mismas funciones. Pero esto no quiere decir que ambos son exactamente lo mismo, los teodolitos difieren de los tránsitos en su apariencia general y también en su diseño. En el teodolito de lectura óptica las más importantes son: 1. Los anteojos son cortos, tienen retículas grabadas en vidrio y están dotados de miras especiales para su apuntamiento aproximado. 2. Los círculos horizontal y vertical están fabricados de vidrio, con las marcas de graduación grabados sobre la superficie de los círculos. Las rayas son muy delgadas y con definición más clara y precisa que la que puede lograrse marcando sobre metal (como sucede en los tránsitos). 3. El círculo vertical de la mayoría de estos teodolitos esta relacionado con precisión respecto a la dirección de la gravedad en una de dos formas: (a) por un compensador automático, o (b) por un nivel de colimación o nivel de índice, generalmente del tipo de coincidencia relacionado con el sistema de lectura del círculo vertical. Ambos proporcionan un plano de referencia más exacto para medir ángulos verticales que los niveles de alidada usados en los tránsitos. Las lecturas en 45 Topografía 1 el circulo vertical son de ángulos cenitales, o sea que se lee 0º cuando el anteojo apunta verticalmente, y 90º o 270º cuando apunta horizontalmente. 4. Los sistemas de lectura de los círculos constan básicamente de un visor o microscopio que tiene su sistema óptico situado dentro del mismo instrumento. Los sistemas de lectura de la mayoría de los teodolitos también pueden iluminarse electrónicamente para trabajar en la noche o bajo tierra. 5. El mecanismo del eje acimutal es cilíndrico, o de cojinete de bolas de precisión, o una combinación de ambos. 6. La base niveladora tiene tres tornillos o levas. 7. Una plomada óptica, construida en la base o alidada de la mayoría de estos teodolitos, reemplaza la plomada común y permite lograr el centramiento con gran exactitud. 5. Poligonación Una poligonal es una serie de líneas consecutivas cuyas longitudes y direcciones se han determinado a partir de mediciones en el campo. El trazo de una poligonal, que es la operación de establecer las estaciones de esta y de hacer las mediciones necesarias, es uno de los procedimientos fundamentales y más utilizados en la práctica para determinar la ubicación relativa entre puntos en el terreno. Las poligonales se pueden clasificar de acuerdo con sus características en dos tipos básicos: Poligonal abierta – el primer punto no coincide con el ultimo. Poligonal cerrada – el primer punto es el mismo con el último, formándose asi un polígono geométrica y analíticamente cerrado. Las poligonales abiertas se usan en los levantamientos para vías terrestres, pero, en general, deben evitarse porque no ofrecen medio alguno de verificación por errores y equivocaciones. En las poligonales abiertas deben repetirse las medidas para evitar equivocaciones. En la poligonal, los ángulos o las direcciones medidas pueden comprobarse fácilmente antes de dejar el campo. Las medidas lineales, especialmente las determinadas con cinta, aun cuando se repitan tienen mayores probabilidades de error y deben verificarse mediante el cálculo, el cual generalmente se hace en la oficina para determinar si la poligonal compensa la precisión exigida. Si se ha satisfecho las especificaciones, se ajusta luego la poligonal para lograr un cierre perfecto, es decir, la congruencia geométrica entre los ángulos y las longitudes, de lo contrario tienen que repetirse las mediciones en el campo hasta lograr los resultados adecuados. La determinación de precisión y la aceptación o el rechazo de los datos son extremadamente importantes en topografía. También es crucial el ajuste para lograr el cierre geométrico. En el levantamiento de previos por ejemplo, la ley exige que las descripciones de las propiedades tengan características geométricas exactas. 46 Topografía 1 Los procedimientos usuales que se siguen en el cálculo de las poligonales son: 1. De los ángulos o direcciones a condiciones geométricas fijas. 2. Determinación de rumbos o acimuts. 3. Calculo de proyecciones y ajuste de estas por error de cierre. 4. Calculo de las coordenadas rectangulares de las estaciones. 5. Calculo de los acimuts (o rumbos) de los lados de la poligonal después de su ajuste. 5.1 LEVANTAMIENTO DE UN LOTE POR MEDIO DE POLIGONALES Cuando el terreno es bastante grande o existen obstáculos que impiden la visibilidad, se emplea este método que consiste en trazar un polígono que siga aproximadamente los linderos del terreno y desde puntos sobre este polígono se toman los detalles complementarios para la perfecta determinación del área que se desea conocer, y de los accidentes u objetos que es necesario localizar. Veamos primeramente lo concerniente a el levantamiento y el calculo del poligonal base, y luego como se complementa el levantamiento tomando los detalles. Para poder tomar las mediciones de una poligonal de vértices 1 – 10 (como la que se muestra a continuación), el procedimiento es el siguiente: 1. Centrar y nivelar el aparato en la estación 1. 2. Localizar la estación numero 2 y tomar el acimut de la estación 1 hacia la estación 2 (puede ser acimut verdadero, magnético) y medir la distancia de 1 a 2. 3. Llevar el aparato a la estación 2, se centra y se nivela. Se localiza la estación numero 3, se mide el ángulo 1-2-3 por reiteración según la precisión requerida, se toma una o varias lecturas de ese ángulo. En la mayor parte de los trabajos tan solo se necesita tomar dos lecturas, si ellas difieren en mas de la aproximación del aparato se hace una lectura adicional. En cualquier caso, el valor definitivo del ángulo será el promedio, descartando las lecturas erradas. Luego se mide la distancia de 2 a 3. 4. Se lleva luego el aparato a la estación numero 3 y se procede tal como se hizo en la estación numero 2. Esta operación se repite en los vértices 4, 5, 6, 7, 8, 9 y 10. 5. Se vuelve a centrar y nivelar el aparato en la estación numero 1, se lee el ángulo 10-1-2 (tal como se hizo para determinar los otros ángulos en los otros vértices). 47 Topografía 1 El quinto paso se puede hacer en el paso 1. 6. Antes de abandonar el sitio de trabajo, se comprueba que el polígono tenga bien determinados sus ángulos en los vértices, es decir, que no se haya cometido un error al leer o anotar uno de los ángulos. Para esta comprobación se toma en cuenta lo siguiente: Los ángulos en los vértices pueden ser exteriores. Poligonal recorrido en sentido horario, los ángulos medidos son exteriores. Los ángulos en los vértices pueden ser interiores. Poligonal recorrido en sentido contrario al horario, los ángulos medidos son internos. Esto se entiende fácilmente si se observa que el teodolito lee siempre ángulos en sentido horario. Si se ha recorrido la poligonal en sentido horario, la suma de los ángulos debe dar (n + 2) × 180º, siendo n el numero de lados de la poligonal. Si se ha recorrido en sentido opuesto, la suma de los ángulos debe dar (n – 2) × 180º. 48 Topografía 1 Ejemplo: Notas de Campo Estación A B C D E Punto Observado Norte E E B C D E A Croquis Angulo Horizontal 0º00’00.00” 26º10.0’ 0º00.0’ 100º44.3’ 231º24.6’ 17º11.9’ 89º05.3’ 101º35.1’ Distancia -----86.898 -----197.212 61.874 219.602 186.065 86.898 Antes de continuar revisamos la suma de los ángulos: A = 100º44.3’ B = 231º24.6’ ∑ = 540º01’12” C = 17º11.9’ D = 89º05.3’ 180º (5 -2) = 540º E = 101º35.1’ Punto A B B C C D D E E A A Acimut Corrección Angulo 126º54’18” -14.4” 231º24’36” 178º18’39.6” -14.4” 17º11’54” 15º30’19.2” -14.4” 89º05’18” 284º35’22.8” -14.4” 101º35’06” 206º10’14.4” -14.4” 100º44’18” 126º54’18” Distancia 197.212 61.874 219.602 186.065 86.898 e = 540º - 540º01’12” e = -1’12” / 5 corrección = -14.4” Corrección ∆N Norte ∆E 10,000.000 -0.044 0.033 -118.424 9,881.532 157.697 10,157.73 -0.044 -61.847 9,819.641 -0.044 211.610 0.033 10,031.207 58.706 10,218.326 -0.044 46.869 0.033 10,078.032 -180.065 10,038.294 -0.044 -77.990 0.033 10,000.000 -38.326 10,000.000 ∑=0.218 ∑=-0.164 49 0.033 1.824 Este 10,000.000 10,159.587 Topografía 1 c = -0.218 5 c = -0.044 Calculo del área Punto E A B C D E A Norte 10,078.032 10,000.000 9,881.532 9,819.641 10,031.207 10,078.032 10,000.000 Este 10,038.294 10,000.000 10,157.73 10,159.587 10,218.326 10,038.294 10,000.000 2 área = Sumatoria 1965020 1832000 -1520600 -2640300 313275 50657.1 Área = 25328.5 m2 Área = 25328.5 m2 * 1.43426 = 36,327.719 vrs2 Área =36,327.719 vrs2/10,000 =3.6 manzanas Derrotero Línea Rumbo Distancia (M) A-B B-C C–D D-E E-A S 53° 05’ 25.75’’ E S 01° 43’ 07.09’’ E N 15° 31’ 00.25’’E N 75° 25’ 14.92’’W S 26° 08’ 21.75’’W 197.265 61.919 219.569 186.022 86.924 50 c = 0.164 5 c = 0.033 Topografía 1 6. RADIAL 6.1 Levantamiento de un Lote con teodolito y cinta (Método Radial) Es el sistema más simple, para medir un terreno empleando el teodolito y la cinta, únicamente se aplica cuando el área del terreno es relativamente pequeña. Procedimiento. Sean los vértices del terreno 1-1, 1-2, 1-3, 1-4, 1-5, 1-6; se centra y se nivela el teodolito en un punto central 1, tal que desde él pueda verse todos los vértices del polígono que determinan el lote y todos los otros puntos que se desean localizar. Desde la estación No.1 se miden las distancias 1(1-1), 1-(1-2), 1-(1-3), 1-(1-4), 1-(1-5), 1-(1-6) y sus respectivos azimut 1-(1-1), 1-(1-2), 1-(1-3), 1(1-4), 1-(1-5), 1-(1-6). Es necesario, luego de tomar el último punto 1-(1-6) en el ejemplo, volver a leer el azimut 1-(1-1) hacia el primer punto para comprobar que el aparato no se ha movido. Error de cierre angular e = Acimut 1-(1-1) tomado por primera vez - Acimut 1-(1-1) tomado por segunda vez. El error no debe ser mayor que la aproximación del aparato, si el error es mayor hay que repetir todas las lecturas de los ángulos. Las distancias, ángulos y datos complementarios para la confección de planos se anotan en libretas especiales de topografía, las cuales tienen hojas con columnas para anotar los datos y hojas cuadriculadas para hacer croquis, que sirven para ver la posición correcta de los diversos puntos establecidos. 51 Topografía 1 Ejemplo Levantamiento de campo. Estación Punto Distancia (mts) Azimut Observaciones 0°00´ Estación observado 1 Norte 1-1 38.200 30°20´ Vértice 1-2 40.100 100°10´ Vértice 1-3 45.200 185°00´ Vértice 1-4 46.150 215°10´ Vértice 1-5 37.500 280°40´ Vértice 1-6 40.300 320°30´ Vértice 30°21´ Vértice 1-1 Error = 30°20´- 30°21´= -1’= -60’’ Corrección = 60’/6 =-10’’ Cálculos Estación Punto Distancia observado (mts) Azimut ajustado ▲ norte ▲ Este este 10,000.000 1 1 Norte 10,000.00 1-1 38.200 30°19’50’’ 32.970 10,032.970 19.292 10,019.292 1-2 40.100 100°09’50’’ -7.076 9,992.924 39.471 10,035.471 1-3 45.200 184°59’50’’ -45.028 9,954.972 -3.937 9,996.063 1-4 46.150 215°09’50’’ -37.728 9,962.272 -26.578 9,973.422 1-5 37.500 280°39’50’’ 6.939 10,006.939 -36.852 9,963.148 1-6 40.300 320°29’50’’ 31.095 10,.31.095 -25.635 9,974.366 52 Topografía 1 Calculo del área Punto 1-6 1-1 1-2 1-3 1-4 1-5 1-6 1-1 Norte 10,031.095 10,032.970 9,992.924 9,954.972 9,962.272 10,006.939 10,031.095 10,032.970 Este 9,974.365 10,019.292 10,039.471 9,996.063 9,973.422 9,963.148 9,974.365 10,019.292 2 área = Sumatoria 382,446.395 783,058.659 306,399.323 -518,288.824 -685,693.735 -259,642.695 8,279.123 Área = 4,139.562 m2 Área = 4,139.562 m2 * 1.43426= 5922.885 vrs2 Área =5922.885 vrs 2 / 10,000 = 0.5 Manzanas Derrotero Línea Rumbo Distancia (M) (1-1) - (1-2) (1-2) - (1-3) (1-3) - (1-4) (1-4) - (1-5) (1-5) - (1-6) (1-6) - (1-1) S 26°44’35.99’’ E S 48°50’11.44’’ W N 72°07’45.97’’ W N 12°57’12.54’’W N 24°54’29.21’’ E N 87°36’36.66’’ E 44.843 57.659 23.789 45.833 26.633 44.966 53 Topografía 1 7. TAQUIMETRIA La taquimetría es un método topográfico usado para determinar rápidamente la distancia horizontal y la elevación de un punto. Las mediciones se logran visando a través de un taquímetro o anteojo dotado de dos o más hilos reticulares horizontales. Situados a una separación conocida. La longitud aparente interceptada entre los hilos superior e inferior se lee sobre un estadal graduado (una estadía) sostenido verticalmente en el punto distante. La distancia del taquímetro al estadal se determina por relaciones de proporciones en triángulos semejantes. Se logra una precisión de 1/500 de la distancia teniendo el suficiente cuidado. Teodolito y estadía Estación Total Teodolito y distanciometro Bastón Porta Prisma Barra subtensa 7.1 Actualmente hay tres tipos de taquimetría: Taquimetría con mira vertical o taquimetría, simplemente: es muy rápida pero de poca exactitud. Taquimetría con mira horizontal o con estadía de invar de alta precisión: es buena para distancias relativamente cortas. Medición electrónica de distancias (M.E.D.): es rápida, muy exacta y un poco costosa. 54 Topografía 1 Taquimetría con mira vertical o taquimetría Se emplea este sistema cuando no se necesita gran precisión o cuando las características mismas del terreno hacen difícil y poco preciso el empleo de la cinta. Se toma el ángulo vertical y se hacen tres lecturas, una lectura superior (s) utilizando el hilo taquimétrico superior, una lectura media (m) justo en el centro y una lectura inferior (i) utilizando el hilo taquimétrico inferior. Para calcular la distancia horizontal (DH) y la distancia vertical (DV) hay dos alternativas: 1. Cuando el anteojo esta horizontal, la distancia D = S (s – i); donde la distancia horizontal DH = D + T, y entonces DH = T + S (s – i) 2. Cuando el anteojo está inclinado, que es el caso general, entonces DH = S (s – i) cos2α + Tcosα DV = S ((s – i)/2) sen2α + Tsenα Donde S es la constante estadimetrica y T es la constante taquimétrica. Generalmente estas constantes las determina el fabricante y están indicadas en el estuche del aparato (en aparatos modernos T = 0 y S = 100). Calculo de cotas HQ =HP+a+Dv–m HQ=HP+a-Dv–m Las posibles causas de error al hacer un trabajo taquimétrico son las siguientes: 1. Que las constantes estadimetricas y taquimétricas no sean las supuestas. 2. Que la mira no tenga la longitud que indica. Hay necesidad de patronarla, y si hay diferencia se debe establecer el error para aplicar a cada lectura la corrección correspondiente. 55 Topografía 1 3. Que la mira no sea colocada verticalmente en el momento de la observación. Para lograr esto se utiliza un nivel circular, el cual garantiza que la mira queda vertical. 4. Error al determinar las lecturas superior e inferior. Es necesario que el observador sea bastante hábil y tenga suficiente práctica. Además de habilidad y experiencia hay que poner especial cuidado al hacer las lecturas, pues la precisión con la que se determina la diferencia (s – i) depende de la exactitud del levantamiento. Por otro lado, ha de evitarse el efecto de la refracción atmosférica, para lo cual hay que abstenerse de hacer observaciones durante condiciones atmosféricas extremas. La paralaje también debe eliminarse, por lo que debe enfocarse correctamente el ocular y el objetivo. 5. Error al determinar el ángulo vertical. 7.2 Recomendaciones El personal necesario para un levantamiento taquimétrico consta de un observador (para el teodolito), uno o varios cadeneros para la mira o las miras y generalmente un anotador (lo cual agiliza mas el trabajo en equipo). Cuando solo se desea conocer D (distancia inclinada), no se requiere anotar el ángulo vertical cuando este es inferior a 3°, pues no vale la pena hacer la reducción al horizonte por ser muy pequeña la corrección. En este caso la distancia inclinada es muy similar a la distancia horizontal. Basta con calcular lectura superior menos la inferior y multiplicarla por constante S que generalmente es 100. Para no tener que anotar (s) e (i), se toma para i (lectura inferior) un número redondo, con lo cual se puede hacer mentalmente la ecuación (s-i) y así solo se tiene que anotar la cantidad s. Cuando se están determinando las cotas de los puntos observados se simplifica básicamente el cálculo si se toma la lectura m igual a la cantidad a (obsérvese la fórmula para el cálculo correspondiente) HQ =HP+a+Dv–m HQ=HP+a-Dv–m HQ =HP+Dv HQ=HP-Dv 56 Topografía 1 8. NIVELACION. Nivelación es un término genérico que se aplica a cualquiera de los diversos procedimientos a través de los cuales se determina elevaciones o diferencias entre las mismas. Es una operación fundamental para tener los datos necesarios para la elaboración de mapas o planos de configuración del terreno y en proyectos de obras de ingeniería y de construcción. Los resultados de la nivelación se utilizan: a) En un proyecto de carreteras, vías férreas, canales, obras de drenajes y sistema de suministro de agua cuyas pendientes se adapten en forma optima en la topografía existente. b) En el trazo de construcciones de acuerdo a elevaciones planeadas. c) En el cálculo de volúmenes de terracería y otros materiales. d) En la investigación de las características de escurrimiento o drenaje de una región. e) En la elaboración de mapas o planos que muestran la configuración general del terreno. f) En el estudio de movimientos de las placas de la corteza terrestre y el asentamiento de las mismas. Definiciones: Línea vertical: La línea que sigue la dirección de la gravedad, indicada por la de una plomada. Superficie de nivel: Superficie curva que en cada punto es perpendicular a la línea de una plomada. Las superficies de nivel son de forma esferoidal. Una masa de agua en reposo es el mejor ejemplo de ello. Línea de nivel: Línea contenida en una superficie de nivel y que es por tanto curva. Plano Horizontal: Plano perpendicular a la dirección de la gravedad. En topografía plana, es un plano perpendicular a la línea de una plomada . Línea Horizontal: Es una línea en plano horizontal. En topografía plana es una línea perpendicular a la vertical. Plano de referencia: Superficie de nivel a la cual se refieren las elevaciones (por ejemplo el nivel medio del mar). Nivel medio del mar (NMM): Altura promedio de las superficies del mar según todas las etapas de las marea en un periodo de 19 años. Se determinan por lecturas tomadas generalmente a intervalos de una hora. Elevación o cotas: Distancia vertical desde un plano de referencia, por ejemplo desde el nivel medio del mar hasta un punto u objeto dado. Banco de nivel: Objeto natural o artificial relativamente permanente, que tiene un punto fijo marcado, cuya elevación arriba o debajo de un plano de referencia adoptado se conoce o se supone. Algunos ejemplos comunes de bancos de nivel son discos de metal fijados en concreto, rocas grandes, partes no móviles de hidratantes contraincendios y bordos de aceras. Nivelación: Proceso de altimetría que se sigue para determinar elevaciones de punto o bien diferencia de elevaciones entre puntos. Control Vertical: Serie de bancos de nivel u otros puntos de cota conocida que se colocan para un trabajo de topografía o geodesia. También se llama control básico o control de nivel. 57 Topografía 1 8.1 Nivelación Diferencial: La elevación de cualquier punto es su distancia vertical sobre un plano de referencia, tal como el nivel medio del mar. Si dos puntos BN y X están situados de forma tal que no se pueden dirigir visuales sobre ellos desde una sola estación del instrumento, su diferencia de elevación se puede determinar por medio de una serie de diferencias como sigue: Se coloca el nivel en estación y se toma la lectura de la mira colocada en el punto inicial BN. Esta lectura se llama visual aditiva (+) o lectura de espalda (LE). Una nivelada de espalda es una lectura de mira tomada sobre un punto cuya elevación es conocida. La mira se coloca después sobre cualquier punto convenientemente adelante (llamado punto de cambio), se toma la lectura y se anota. A esta se le llama visual substractiva (-) o lectura de frente (LF). Una nivelada de frente es una lectura de mira tomada sobre un punto cuya elevación se va a determinar. En nivelaciones términos de espalda o frente no se refieren a las direcciones en que se toman las visuales. El nivel se lleva entonces adelante a una nueva posición desde la cual se puede tomar una lectura de espalda sobre el mismo punto de cambio. Cuando se ha tomado la lectura de la mira de esta lectura de espalda, la mira se lleva adelante a un punto de cambio y se toma una lectura de frente mientras el nivel sigue todavía en su segunda estación. Estos puntos de cambio deben, naturalmente, ser tales que no varíen sus elevaciones mientras se está efectuando el trabajo. La nivelación se continúa de esta forma hasta que se alcanza el punto final. Puesto que una lectura de espalda es la distancia vertical medida hacia arriba desde un punto de elevación conocida hasta el plano horizontal del retículo y una lectura de frente es la distancia vertical hacia abajo desde este último plano hasta un punto de elevación desconocido, la suma de todas las lecturas de espalda menos la suma de todas las lecturas de frente será la diferencia de elevación buscada. El resultado será negativo si el punto X esta más abajo que el punto BN. 58 Topografía 1 Levantamiento de campo Forma de anotar en campo Estación LE HI BN 10 0.405 PL1 0.067 PL2 0.293 PL3 0.140 BN Roble 3.642 PL4 3.825 PL5 3.892 BN10 12.264 LF Elevación 625.809 2.551 2.411 3.572 2.655 0.796 0.207 0.064 12.256 Elevación ajustada 625.809 625.809 El procedimiento de cálculo es el siguiente: 59 Topografía 1 A la elevación del BN 10 (625.809) se le suma la lectura de espalda (LE = 0.405) y nos da la altura del Horizonte instrumental HI = 626.214, a esta altura 626.214 se le resta la Lectura de frente LE = 2.551 y nos da la altura del punto de cambio PL1 = 623.663, se repite este procedimiento has calcular la altura del BN 10 que en este caso nos da 625.817 Se hace necesario realizar una comprobación, la cual consiste en sumarle la sumatoria de todas las lecturas de espalda a la altura del BN 10. (12.264 + 625.809) = 638.073, a este valor 638.073 se le resta la sumatoria de todas las lecturas de frente 12.256 y da como resultado = 625.817, con este resultado comprobamos que el procedimiento anterior fue bien realizado porque el resultado es el mismo. Calculo Estación BN 10 PL1 PL2 PL3 BN Roble PL4 PL5 BN10 LE 0.405 0.067 0.293 0.140 3.642 3.825 3.892 12.264 HI 626.214 623.730 621.612 618.18 619.167 622.196 625.881 LF Elevación 625.809 623.663 621.319 618.040 615.525 618.371 621.989 625.817 2.551 2.411 3.572 2.655 0.796 0.207 0.064 12.256 Elevación ajustada 625.809 623.662 621.317 618.037 625.809 Determinamos el error = 625.809-625.817 = -0.008 M Si pueden observar la nivelación comenzó en el BN10 y finalizo en el BN 10. Calculamos la Tolerancia = 1 Cm * Raíz cuadrada de n, donde n es el Numero de puestas del nivel = 7, por lo tanto la tolerancia es = 2.6 Cm, concluimos que el error – 8 MM esta dentro de la tolerancia. Procedemos a calcular la corrección = -0.008/7 = -0.0011 (El error entre el Numero de estaciones del nivel). Si se fijan la altura 625.817 es mayor que la altura del BN10 625.809 por lo tanto la corrección se resta y se calcula de la siguiente manera: A la corrección 0.0011 se multiplica por 1 y se resta a la altura del PL1 = 623.663 y esto nos da la altura ajustada del PL1 = 623.662. A la corrección 0.0011 se multiplica por 2 y se resta a la altura del PL2 = 621.319y esto nos da la altura ajustada del PL1 = 621.317 A la corrección 0.0011 se multiplica por 3 y se resta a la altura del PL3 = 618.040 y esto nos da la altura ajustada del PL1 = 618.037 Y así sucesivamente hasta llegar al valor del BN10 625.809 M 60 Topografía 1 Tarea No1, sale del BN1 y regresa al BN1 Estación LE HI LF BN1 3.615 PL1| 3.791 0.207 PL2 3.492 0.325 BN2 2.406 3.140 PL3 0.758 3.321 PL4 0.541 3.829 BN1 3.775 Elevación 784.592 Elevación ajustada 784.592 784.592 No 2, sale del BN E y llega al BN B Estación LE HI LF BN E 3.490 PL1 3.175 0.072 PL2 3.739 0.680 X 1.752 PL3 3.572 0.089 PL4 3.639 0.052 PL5 3.970 0.078 PL6 3.885 0.012 PL7 3.882 0.065 PL8 1.850 0.210 BN B 1.335 Elevación 1000.000 Elevación ajustada 1000.000 1028.617 61 Topografía 1 8.1.1 Nivelación por doble punto de liga En este procedimiento se llevan dos nivelaciones simultáneamente, trabajando con dos series de puntos de liga, de tal manera que se aproveche la misma puesta de instrumento en ambas series de observaciones, pero con diferentes lecturas de estadal. La secuencia de una nivelación entre un Banco de Nivel de cota conocida (BN 1) y otro de cota por determinar (BN 2), se muestra en el siguiente esquema. 8.1.2 Nivelación por doble altura de aparato Al igual que en el procedimiento anterior, también en este se llevan dos nivelaciones simultaneas, solo que con los mismos puntos de liga, y con diferentes alturas de instrumento. La secuencia de una nivelación por doble altura de aparato entre un Banco de Nivel de cota conocida (BN 1) y otro de cota por determinar (BN 2), se muestra en el siguiente esquema. Como al efectuar la comprobación de una nivelación realizada por doble punto de liga o por doble altura de aparato, se obtienen dos valores para el desnivel total, el valor más probable es el promedio de los dos resultados o media aritmética. El error se determina haciendo la diferencia entre el valor más probable y las nivelaciones realizadas, este error no debe ser mayor a la tolerancia obtenida por medio de las expresiones indicadas en la siguiente tabla: Tolerancias En Nivelaciones Topográficas Comunes NIVELACIONES TOLERANCIAS, EN METROS IDA Y REGRESO T = 0.01 * Raíz cuadrada de K DOBLE PUNTO DE LIGA T = 0.015* Raíz cuadrada de K DOBLE ALTURA DE APARATO T = 0.02* Raíz cuadrada de K Siendo K = doble de la distancia recorrida en Km 62 Topografía 1 EJERCICIO.- En una nivelación realizada por doble punto de liga entre dos Bancos de Nivel, se tomaron las lecturas de estadal que aparecen en los registros de campo siguientes; si la distancia entre Bancos de Nivel, es de 290 m, determina: a) Las cotas de los PL(s) y del BN 2, b) Hacer la comprobación aritmética, c) El valor más probable para la cota del BN 2, d) El error en la nivelación, e) La tolerancia para el desnivel obtenido, indicando si se acepta o rechaza la nivelación 63 Topografía 1 8.2 Nivelación Trigonométrica: La nivelación trigonométrica o indirecta consiste en la medición de ángulos cenitales y distancias horizontales. Se estaciona el instrumento en un punto A de elevación conocida, y se visa a un punto B que se desea conocer la elevación. Colocando en este una estadía o un prisma o un heliotropo o una lámpara de señales. Se mide el ángulo cenital y se determina la distancia. Dependiendo de la longitud de la distancia entre los puntos se toma en cuenta la corrección de curvatura de la tierra. Si la distancia sobrepasa los 1500 metros hay que considerar la corrección por curvatura de la tierra y refracción; en caso de que el ángulo cenital se observa también del otro extremo, entonces el efecto de la curvatura y refracción se elimina. Este tipo de nivelación proporciona un medio rápido que determina las elevaciones de los puntos en terreno quebrado. 64 Topografía 1 65 Topografía 1 Taquimetría Mira horizontal 66 Topografía 1 Taquimetría Mira vertical 1. Encontrar la distancia horizontal, la diferencial de elevación y determine qué punto es más alto entre los puntos A Y B. Se centro y nivelo un teodolito en A, con una altura de instrumento a = 1.68mts. Y se dio vista a una mira vertical (estadia) colocada en B con los hilos trigonométricos, se leyó en la mira s= 3.50 mts., m= 2.25 mts. , i = 1.00 mts., mientras el ángulo de elevación de la visual era de -12° 17’ ( ángulo de depresión). Las constantes del teodolito son S= 100 y T=0. Formulas: Dh = S(s-i)cos²α + T cos α Dv = S(s-i) cos α sen α + Tsen α 2. El punto P tiene coordenadas N=1,000.00 mts. , E=800.00 mts. y H=600.00 mts. Se centro y nivelo un teodolito en P con una altura de instrumento a=1.72 mts., se lanzo una visual a una mira vertical colocada en Q y en ella se leyó s=3.25 mts. , m=2.49 mts., i= 1.75 mts. Con la visual con un ángulo cenital z=78°27’, las constantes del instrumento S=100, T=0. ¿Calcular la altura H del punto Q? 67 Topografía 1 Formulas: Dh = S(s-i)cos²α + T cos α Dv = S(s-i) cos α sen α + Tsen α HQ = HP + a + Dv - m 8.3 Nivelación Barométrica: La presión atmosférica varía en forma inversamente proporcional a la altura sobre el nivel del mar; así, en función de la presión en un determinado lugar se puede establecer su altura; por tanto, si se conoce la diferencia de presión entre dos puntos, se puede precisar la diferencia de nivel existente. En este principio se basa la nivelación barométrica, llamada así por ser el barómetro el aparato usado en la determinación de la presión atmosférica. Existen dos clases de barómetros, el barómetro de mercurio y el aneroide. Ya que el barómetro de mercurio es muy delicado para su transporte y de que una lectura toma bastante tiempo, el aneroide, que es además más liviano y pequeño, lo ha reemplazado. Los últimos modelos de aneroides, llamados altímetros, son los que actualmente se utilizan para esta clase de nivelaciones y con ellos se obtienen alturas que solo presentan errores promedios de un metro, aproximadamente. 68 Topografía 1 Factores como la temperatura y la humedad hacen que la presión atmosférica varié, causando que este tipo de mediciones no sea muy precisa. Por esta razón es que la nivelación barométrica se usa solo para determinaciones grosso modo de diferencias de nivel entre puntos de terrenos montañosos. La diferencia de altura entre dos puntos puede medirse de manera aproximada, según sus posiciones relativas bajo la superficie de la atmosfera en relación con el peso del aire, o sea la presión atmosférica, esta presión se determina por medio de un barómetro. Los barómetros utilizados en topografía son instrumentos portátiles, los cuales se calibran previamente en un banco de nivel de cota conocida. 9. Curvas de Nivel Se denomina curvas de nivel a la línea determinada por la intersección del terreno con un plano horizontal (figura 1). Así, como una curva de nivel une puntos de igual cota. Tomando una serie de planos horizontales equidistantes se obtiene un conjunto de curvas de nivel, las cuales al proyectarlas sobre un plano representa el relieve del terreno 69 Topografía 1 Figura 1. Esquematización de los planos horizontales y las correspondientes curvas de nivel Curvas de nivel Si se supone un terreno cualquiera cortado por una serie de planos paralelos al de comparación y equidistantes entre sí, estos planos determinan en sus intersecciones con el terreno una serie de Curvas que reciben el nombre de curvas de nivel. Definiciones. Curva de Nivel. Es la representación en proyección horizontal de una línea que une puntos de igual cota. Equidistancia. Es la separación vertical que existe entre dos curvas de nivel consecutivas, depende de la escala del dibujo y de la pendiente del terreno. Curvas de Nivel Maestras O Índice. Son las quintas curvas a las que se indica cota o elevación. Curvas de Nivel Intermedias. Son las comprendidas entre las curvas maestras o Índice y se representan con menor calidad de línea. 70 Topografía 1 9.1 Características de las Curvas de Nivel 1. Toda curva debe cerrar sobre sí misma. Esto puede ocurrir dentro del área levantada o fuera de ella y por tanto, no aparecer en el plano. 2. Una curva no puede ramificarse en otras de la misma cota. 3. Las curvas no se pueden juntar o cruzar porque representan contornos de diferente cota en el terreno. 4. Las curvas solo se cruzan entre sí en el caso de una caverna o de un peñasco en voladizo. 5. Las curvas de nivel al aproximarse a los ríos y quebradas, durante un corto espacio son paralelas a ellos y luego se trazan hacia arriba en forma de V con el vértice de aguas arriba. 6. Cuando el río o quebrado se divide en otros dos las curvas de nivel en vez de formar una V Forman una M. 7. Las curvas igualmente espaciadas indican pendiente uniforme. 8. Si el espaciamiento entre las curvas es amplio la pendiente es suave, si es muy estrecho la pendiente es fuerte y si las curvas llegan a quedar sobrepuestas indicara un acantilado. 9. Las curvas concéntricas y cerradas representan una elevación ó una depresión, según que las cotas vayan creciendo o decreciendo hacia el centro, respectivamente. 71 Topografía 1 10. Las curvas son perpendiculares a las líneas de máxima pendiente y tienden a ser paralelas a las corrientes. 11. Las curvas en las divisorias de las aguas son cóncavas hacia la parte más alta mientras que En los arroyos o vaguadas son convexas. 12. Los picos y cimas son fáciles de identificar porque las curvas se cierran en la misma área. Vista oblicua Vista mapa y perfil 72 Topografía 1 Las características de las curvas de nivel nos ayudan a interpretar los planos topográficos, en la figura anterior se aprecia un puerto, en el diseño de caminos es punto obligado en la localización de la ruta. El proceso que hay que seguir para dibujar las curvas de nivel consiste en unir sobre el plano puntos que tengan igual cota. El dibujante debe unir puntos de igual cota tratando de que, entre punto y punto, la curva represente fielmente la intersección del terreno con el plano correspondiente; para esto debe analizar y tratar de visualizar el relieve del terreno antes de proceder a trazar definitivamente estas curvas. Los puntos que se unen para trazar una curva de nivel son los llamados puntos de cota redonda. Si éstas se han tomado directamente en el terreno, el problema es muy simple, pues basta con localizarlos en el plano y proceder a trazar las curvas; este procedimiento simplifica el trabajo de cálculo y dibujo, pero en cambio es bastante dispendioso en el terreno. 73 Topografía 1 Trazar las curvas de nivel cada 10 metro 74 Topografía 1 9.1.1 Interpolación En cambio, si en el terreno se han tomado puntos determinados y se les ha establecido su cota, entonces es necesario interpolar entre éstos para encontrar los puntos de "cotas redondas". Esta interpolación se puede hacer por diferentes métodos: 9.1.1.1 Por estimación: se emplea cuando, además de no requerirse mayor precisión, el dibujante tiene conocimiento del terreno y criterio suficiente para efectuar, mediante cálculos mentales aproximados, la interpolación. 9.1.1.2 Por computación aritmética: pese a ser el sistema más dispendioso, es el que da mayor precisión si el terreno es más o menos parejo. Se interpola en forma lineal. Se tiene Cota de a = 99.20m Cota de b = 98.10m Se quiere buscar el punto de cota 99,00 m si hay una distancia de 5 m entre los dos puntos. Se hace el siguiente raciocinio: si en 5m hay una diferencia de nivel de 1,10 m, en x metros habrá una diferencia de 0,20 m, de donde: X= 5 0.20 0.91 1.10 Figura 4. Interpolación aritmética de una cota redonda 9.1.1.3 Gráficamente: interpolar aritméticamente, cuando el número de puntos que se desea interpolar es bastante grande, puede resultar demasiado dispendioso y, por tanto, se ha ideado el método gráfico que da una aproximación aceptable. Los paquetes de software para topografía tienen programas especiales que hacen la correspondiente interpolación para dibujar las curvas de nivel. 75 Topografía 1 Por computación aritmética: Trazar las curvas de nivel cada metro 13.19 15.42 17.49 14.36 15.63 16.68 15.72 16.59 17.79 17.11 17.80 18.32 19.51 18.19 19.69 18.61 20.36 18.93 20.87 19.89 9.2 Nivelación de un terreno a) 9.2.1 Sistema radiación: Se emplea cuando el terreno, además de no ser muy grande, es más o menos plano. Lo que se hace prácticamente es una nivelación simple desde el punto A (figura 1) sobre el cual se nivela el aparato. Cada una de las líneas AO se nivela por uno cualquiera de los sistemas vistos para nivelar una línea. Luego se unen los puntos de cota redonda y se obtienen las curvas de nivel o, simplemente, en cada punto se anota su cota, que es muy usual en terrenos con pequeñas diferencias de nivel. Figura 1 b) 9.2.2 Sistema cuadricula: Se emplea cuando el terreno es más extenso y presenta variaciones considerables de nivel. Al hacer el levantamiento del terreno se estaca el lado mayor del polígono (AB, Figura 2) y una perpendicular a esta (BC) cada 5, 10 o 20 m (según la precisión requerida). Luego se levantan perpendiculares a AB y (BC) por los puntos estancados; estas perpendiculares también se estancan. 76 Topografía 1 Figura 2 Finalmente se nivelan todas las estacas y se hallan, por interpolación, las cotas redondas para dibujar las curvas de nivel. c) 9.2.3 Cuando se trata de nivelar una faja de terreno. Como el trazado de una vía, se procede de esta manera: se traza una poligonal a lo largo de la zona cuya topografía se desea conocer (ABCD) (Figura 3). Se ponen estacas cada 10 o 20 m (según las características del terreno y la precisión requerida). Se nivela con nivel de precisión toda la poligonal, con lo cual se fijan cotas a las estacas. Luego, por cada estaca se traza una perpendicular a la poligonal; estas perpendiculares deben tener una longitud de más o menos 50 m a lado y lado de la poligonal (esto varía según el ancho de la zona que se desea levantar). Se nivela cada una de estas transversales, con lo cual se determinan los puntos de cota redonda para luego trazar las curvas de nivel. En los vértices también se nivelan las bisectrices y las perpendiculares exteriores a cada uno de los alineamientos para que no queden zonas sin determinar. En la nivelación de estas transversales y bisectrices se puede emplear nivel de precisión si se desea una topografía muy exacta de la zona, pero generalmente es suficiente usar nivel de mano y hacer la nivelación de la línea por el método de cotas redondas. 77 Topografía 1 Figura 3 Fuentes: Topografía, Torres y villate Ing. Manuel Zamarripa Medina Apuntes de Topografía 78