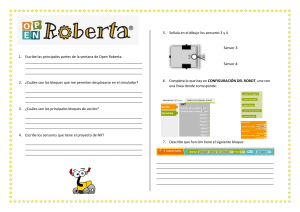
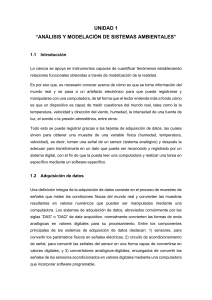
GUANTE SENSORIAL PARA LA MEDICION DE LA FUERZA DACTILAR EN LOS FALANGES DE LA MANO. a a a Guzmán Luna Carlos Alberto , Moreno Gómez Diana Laura , Monroy Bautista José De Jesús , a a López Lozano Jair Ismael , Ángeles Alameda Noemí Jossendy , M. en C. Vázquez López José b Gabriel a. Universidad Politécnica de Pachuca: Programa Educativo de Ingeniería Biomédica. b. Cuerpo Académico: Departamento de Biomédica. RESUMEN El presente trabajo de investigación consiste en el diseño y fabricación de un diseño novedosa para el monitoreo, medición de la fuerza y el avance en la rehabilitación en personas que hayan sufrido alguna lesión en los músculos o tendones de la mano y los dedos. Es una herramienta que ayuda al terapeuta a dar seguimiento al tratamiento de lesiones y evaluar la mejora en el paciente. Simultáneamente permite un registro secuencial de la fuerza que es capaz de ejercer un paciente. Existen diversos aparatos que miden la fuerza como el dinamómetro hand-arm; la desventaja de este dinamómetro es que solo mide la fuerza de toda la mano y se pierde un diagnóstico exacto de la zona afectada. Además no ofrece un registro en tiempo real. Nuestra propuesta permite la medición en tiempo real de fuerza en cada falange, de tal forma que es posible establecer la evolución del paciente en cada sección de la mano. Cabe destacar que el diseño se desarrolló con la finalidad de obtener una herramienta de bajo costo, sin olvidar que puede ser manipulado por el terapeuta de forma fácil. 1. INTRODUCCIÓN Una de las herramientas más importantes con las que cuenta el ser humano son sus extremidades superiores, en ellas se localizan los falanges que nos permiten realizar un sin número de actividades; una de ellas es explorar e interactuar con el exterior. Las lesiones traumáticas de manos como el síndrome del túnel carpiano y trastornos de la muñeca en general, ocupan los primeros lugares de los accidentes de trabajo y motivos de consulta en los servicios médicos [1]. Por otra parte, este tipo de lesiones pueden ocasionar secuelas importantes como deformidad articular, rigidez e incapacidad [2]. El monitoreo de la fuerza dactilar con ayuda de este dispositivo nos permite establecer una línea base en la medición, ya que no existe referencia alguna de la fuerza ejercida por cada falange, también nos permite registrar el avance en cada individuo que haya sufrido alguna lesión, para la comparación en respuesta al tratamiento, programa de ejercicios y/o actividades terapéuticas. Existen varias técnicas que pueden dar mayor información de cómo se encuentra físicamente el tendón o donde exista la lesión alguna de ellas son: radiografía, ecografía, resonancia magnética y técnicas invasivas. Para los especialistas en terapia física basta con conocer la cantidad de fuerza que puede ejercer el paciente. En la actualidad no se cuenta con un equipo que permita dar solución a esta problemática en específico. En los últimos años se han desarrollado dispositivos para medir fuerzas musculares del miembro superior que consiste en una serie de sensores que deben ser sostenidos por el examinador, este método por ejemplo tiene ventaja de ser mejor al cuantificar los valores de las fuerzas pero la desventaja es que conservan la limitación de que la fuerza del examinador es la que gradúa la resistencia opuesta al miembro evaluado. Otros equipamientos más sofisticados son por ejemplo el ULTMS (Upper Limb Tone Measurement System) desarrollado por la universidad de Johns Hopkins [3], que es un dispositivo robótico automatizado para cuantificar el tono de los grupos flexores y extensores de la muñeca, este combina sensores de fuerza junto con análisis de ultrasonido para la identificación del musculo pero debido a su elevado precio son de difícil acceso y no se encuentran disponibles en nuestro país. El objetivo del dispositivo es definir en tiempo real cuanta fuerza puede aplicar cada una de las falanges de los pacientes con el fin de aportar una herramienta tecnológica para los especialistas en terapia física. Adicionalmente puede tener aplicaciones en otras áreas de investigación científica tales como la realidad virtual. 2. TEORIA Existen materiales que tienen la capacidad de conducir electricidad a partir de un proceso químico llamado dopaje, dichos materiales pueden ser semiconductores o aislantes que al ser dopados logran tener la capacidad de permitir el flujo de electrones a través de él, un ejemplo de este comportamiento es el de la esponja electro conductiva, está hecha de polímeros que a su vez están unidos a elementos que permiten fácilmente la circulación de corriente eléctrica, este material tiene un comportamiento parecido al de un resistor variable ya que al someterlo a una diferencia de potencial entre sus superficies y posteriormente deformarlo el voltaje de salida tiene variaciones [4]. 3. PARTE EXPERIMENTAL Se hicieron pruebas experimentales que consistieron en buscar la adaptabilidad de las esponjas conductivas junto con una laminilla de aluminio, sin embargo al usar placas de aluminio se observó la deformación de las misma, esto derivó en la necesidad de implementar otro diseño. Posteriormente el material de conducción fue reemplazado por placa fenólica, el también se optó por probar un material líquido llamado barniz conductivo el cual se aplicó en la parte superior e inferior de las esponjas para sustituir las placas. El barniz conductivo tuvo una desventaja ya que era solvente y fue absorbida por las superficies del sensor evitando que al deformarse por la presión regresaran a su forma inicial. Para la realización de una nuevo modelo de sensor se utilizó una nueva esponja electroconductiva a la cual se le colocó una placa de cobre en la parte para así tener mayor conducción lo cual fue un factor determinante en la sensibilidad del sensor, ya implementado el sensor se cubrió con un material hidrofóbico que ayudó a aislar el sensor del medio externo (fig. 1). Con el propósito de lograr mayor compresión en el comportamiento de nuestros sensores adaptados al guante, mostraremos los diferentes modelos matemáticos, por medio de un análisis en cada una de las 5 secciones de nuestro guante que representan cada uno de los dedos, pulgar (sensor 1), índice (sensor 2), medio (sensor 3), anular (sensor 4), meñique (sensor 5). Fig. 1. Sensores elaborados Modelo: Sensor 1: Dedo Pulgar. 𝑐𝑐1(𝑥𝑥) = 𝑎𝑎 + (1/(𝑏𝑏 + (exp(−𝑐𝑐 ∗ 𝑥𝑥))) a) 0.7229 (0.5706, 0.8752) b) 0.3162 (0.2799, 0.3526) c) 0.03302 (0.0255, 0.04053) Fig. 2 Comportamiento del sensor 1 Sensor 2: Dedo Índice. 𝑐𝑐1(𝑥𝑥) = 𝑎𝑎 + (1/(𝑏𝑏 + (exp(−𝑐𝑐 ∗ 𝑥𝑥))) a) -0.6248 (-0.7232, -0.5265) b) 0.2342 (0.2109, 0.2575) c) Fig. 3 Comportamiento del sensor 2 0.02822 (0.02451, 0.03193) Sensor 3: Dedo medio. 𝑐𝑐1(𝑥𝑥) = 𝑎𝑎 + (1/(𝑏𝑏 + (exp(−𝑐𝑐 ∗ 𝑥𝑥))) a) 0.7229 (0.5706, 0.8752) b) 0.3162 (0.2799, 0.3526) c) 0.03302 (0.0255, 0.04053) Fig. 3 Comportamiento del sensor 3 Sensor 4: Dedo anular. c1(x) = d ∗ (1/(b + (exp(c ∗ x)))) a) 0.04706 (0.03573, 0.0584) b) -0.04747 (-0.05281, -0.04214) c) 0.09894 (0.07196, 0.1259) Fig. 4 Comportamiento del sensor 4 Sensor 5: Dedo meñique. 𝑐𝑐1(𝑥𝑥) = 𝑎𝑎 + (1/(𝑏𝑏 + (exp(−𝑐𝑐 ∗ 𝑥𝑥))) a) -0.04877 (-0.1259, 0.02834) b) 0.3286 (0.3086, 0.3487) c) Fig. 5 Comportamiento del sensor 5 0.0326 (0.02861, 0.03659) Los datos obtenidos de cada sensor con relación al peso se ingresaron en un programa para cálculos numéricos llamado MATLAB en cual se implementó el modelo matemático y se logró determinar las ecuaciones que caracterizaron el comportamiento de cada sensor. Una vez que se verifico el comportamiento del guante al someter cada una de sus secciones a una fuerza compresiva, se identificó el principio físico que se definió como resistivo. Se utilizó la placa ARDUINO y el programa LABVIEW para adaptar el guante y así se visualizaron los datos de forma digital, logrando una mejor lectura y precisión; ingresamos ordenes especificas con la finalidad de obtener en tiempo real el comportamiento del mismo, teniendo un registro de cada medición, de igual forma se logró graficar cada dato en el momento de la prueba. 4. CONCLUSIONES Se presentó un dispositivo novedoso y de bajo costo que cumple con los requerimientos mínimos para el uso y monitoreo de la variable de interés en tiempo real. Este dispositivo es un prototipo que se puede seguir desarrollando a fondo para lograr una medición exacta de la fuerza dactilar, ya que puede ser utilizado en diversas áreas de investigación como por ejemplo en la tecnología haptica. REFERENCIAS [1] Weissman BN, Sledge CB. Orthopedic Radiology. W.B. Saunders Co. Philadelphia, 1986; 111167. [2] Dr. Álvaro Martin Acosta Padilla. (2015). Diagnóstico y manejo de las lesiones traumáticas e la mano en el adulto. México, D.F.: CONETEC. [3] Department of Physical Medicine & Rehabilitation, Universidad Johns Hopkins, Baltimore, Maryland, USA. Disponible en http://www.hopkinsmedicine.org/Rehab/research/biomech.html (revisado en octubre de 2008). [4] Dr. Alejandro Baeza. (2012). Polímeros Conductores Inteligentes. Facultad de química, Departamento de química analítica: UNAM.