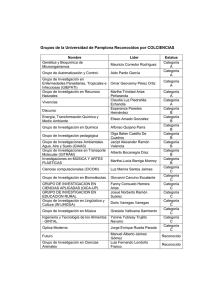
SISTEMAS DE CONTROL
ANÁLOGO
PRIMERA PARTE
INSTITUCIÓN UNIVERSITARIA DE
ENVIGADO
Luis Edo García Jaimes
PROGRAMA
Luis Edo García Jaimes
BIBLIOGRAFIA
Dorf, Richard and Bishop, Robert. Sistemas de Control Moderno. Pearson 10ma.
ed. España, 2006.
Dorsey, John. Sistemas de Control Continuos y Discretos. McGraw-Hill. 1era. ed.
México, 2003.
Kuo, Benjamin and Golnaraghi, Farid. Automatic Control System. Wyle and Sons.
8va. ed. New York, 2003.
Nise, Norman. Control Systems Engineering, Wiley & Sons. 4ta ed. California,
2007.
Ogata, Katsuhito. Ingeniería de Control Moderna, Pearson. 4ta. ed. España, 2002.
Phillips, Charles and Harbor, Royce. Feedback Control Systems. Prentice Hall.
3era. ed. 1996.
Fongiel
M.
Automatic
Control
System/Robotics.
Re-search and Education
Association 1era. ed.
Kuo, B.C.,"Sistemas de control automático", Ed. Prentice Hall.
F. Matía y A. Jiménez, “Teoría de Sistemas”, Sección de Publicaciones Universidad
Politécnica de Madrid.
Luis Edo García Jaimes
SISTEMA DE CONTROL
En un sentido lo más amplio posible, un sistema de control es un arreglo de
componentes tales que, ante unos objetivos determinados, responde con una serie
de actuaciones para cumplir con dichos objetivos
Luis Edo García Jaimes
ELEMENTOS EN UN SISTEMA DE CONTROL
Sistemas: Un sistema es una combinación de componentes que actúan juntos y
realizan un objetivo determinado. Hay sistemas físicos, biológicos, económicos y
similares.
Planta: Para el control, una planta es cualquier objeto físico que se va a controlar
Proceso: Es una operación progresivamente continua, caracterizada por una serie
de cambios graduales que se suceden unos a otros de una forma relativamente fija
y que conducen a un resultado o propósito determinado. Algunos ejemplos son los
procesos químicos, económicos y biológicos.
Variable controlada: Generalmente se le conoce como señal de salida. Es la
cantidad o condición que se mide y controla
variable manipulada: es la cantidad o condición que el controlador modifica para
afectar el valor de la variable controlada.
Luis Edo García Jaimes
ELEMENTOS EN UN SISTEMA DE CONTROL (2)
Señal de referencia o set-point. Es la señal consigna o valor que se desea que
adquiera la señal de salida.
Perturbación: Es una señal que tiende a afectar adversamente el valor de la salida
de un sistema. Si la perturbación se genera dentro del sistema se denomina interna,
mientras que una perturbación externa se genera fuera del sistema y es una
entrada.
Sensor: El sensor es el elemento que permite captar el valor de la variable a
controlar en determinados instantes de tiempo.
Actuador: Es elemento que actúa sobre el sistema modificando el valor del fluido o
agente de control para llevar la salida al valor deseado.
Controlador: También llamado regulador, es el elemento que comanda al actuador
en función del objetivo de control.
Luis Edo García Jaimes
SISTEMA DE CONTROL
Luis Edo García Jaimes
SISTEMAS DE CONTROL EN LAZO ABIERTO
Los sistemas de control en lazo abierto son aquellos en los cuales la señal de
salida no tiene influencia sobre la señal de entrada.
En los sistemas de lazo abierto no se compara el valor de la variable controlada con
el valor de una entrada de referencia
Luis Edo García Jaimes
SISTEMA DE CONTROL EN LAZO CERRADO
los sistemas de control en lazo cerrado o con realimentación son aquellos en los
cuales la señal de salida tiene efecto sobre la acción de control. en estos sistemas
se compara la señal de referencia con la señal de salida controlada para determinar
cuál es la diferencia existente entre ambas y con base a esa diferencia se ejerce la
acción de control
Luis Edo García Jaimes
DIAGRAMA DE SISTEMA DE CONTROL EN LAZO
CERRADO
Luis Edo García Jaimes
CONTROL ANÁLOGO y CONTROL DIGITAL
En función del tipo de señal que use el detector de error, el control puede ser:
análogo, digital e híbrido. en caso de ser un sistema en bucle cerrado, o en el
regulador en caso de ser un sistema en bucle abierto.
Control análogo: En este sistema de control, las variables están representadas
por ecuaciones con cantidades físicas continuas. El proceso directo de la señal
analógica está ligado al uso de amplificadores operacionales y sus
propiedades.
Control digital: Este sistema de control que funciona con variables
discontinuas codificadas.
Control hibrido: Este tipo de control puede procesar señales análogas y
discretas.
Luis Edo García Jaimes
SEÑALES ANÁLOGICAS Y SEÑALES DIGITALES
Luis Edo García Jaimes
CONTROL ANÁLOGO Y CONTROL DIGITAL
Luis Edo García Jaimes
MODELADO DE SISTEMAS FÍSICOS
Para realizar el análisis de un sistema de control, es necesario obtener un modelo
matemático que lo represente.
El modelo matemático equivale a una ecuación matemática o a un conjunto de
ecuaciones mediante las cuales es posible determinar el comportamiento del
sistema.
Luis Edo García Jaimes
SISTEMA MECÁNICO TRASLACIONAL
Los sistemas mecánicos traslacionales son aquellos en los cuales el movimiento se
produce a lo largo de una línea recta, los elementos traslacionales activos son la
fuerza y la velocidad, y los elementos pasivos son la masa, la elasticidad y el
amortiguamiento.
Su dinámica se basa en la segunda ley de Newton.
𝑚. 𝑎 =
𝐹
Luis Edo García Jaimes
EJEMPLO SISTEMA MECÁNICO TRASLACIONAL
Hallar las ecuaciones diferenciales que describen el comportamiento dinámico del
sistema mecánico de la Figura cuando se le aplica una fuerza 𝑓 = 𝑢
Aplicando la segunda ley de Newton
𝑚. 𝑎 =
𝑓𝑖
𝑖
Masa 𝒎𝟏 :
𝑚1 𝑥1 = 𝑢 − 𝑓𝐾1 − 𝑓𝑏1 − 𝑓𝐾2
Masa 𝒎𝟐 :
𝑚2 𝑥2 = −𝑓𝐾2
Fuerza del resorte:
𝑓𝐾 = 𝐾𝑥
𝑑2 𝑥
𝑚 2=
𝑑𝑡
𝑓𝑖
𝑖
Fuerza del amortiguador:
Masa 1:
𝑚1 𝑥1 = 𝑢 − 𝑘1 𝑥1 − 𝑏1 𝑥1 − 𝑘2 𝑥1 − 𝑥2
Masa 2:
𝑚2 𝑥2 = −𝑘2 𝑥2 − 𝑥1
𝑓𝑏 = 𝑏
𝑑𝑥
𝑑𝑡
Luis Edo García Jaimes
EJERCICIOS
Obtener las ecuaciones diferenciales que describen la dinámica de los siguientes
sistemas mecánicos traslacionales
Luis Edo García Jaimes
SISTEMA MECÁNICO ROTACIONAL
Si existe una rotación, los elementos básicos son el resorte de torsión, el
amortiguador giratorio y el momento de inercia, es decir, la inercia de una masa con
movimiento giratorio. Con estos elementos la entrada es el torque y la salida el
movimiento angular. Su dinámica se basa en la segunda ley de Newton: 𝐽𝛼 =
𝑇
Luis Edo García Jaimes
EJEMPLO SISTEMA MECÁNICO ROTACIONAL
Determinar las ecuaciones dinámicas del sistema mecánico rotacional mostrado a
continuación.
Segunda ley de Newton:
𝐽𝛼 =
𝑇
𝑖
Masa 𝑱𝟏 :
𝐽1 𝜃1 = 𝑇1 (𝑆) − 𝑇𝐾1
Masa 𝑱𝟐 :
𝐽2 𝜃2 = −𝑇𝐾1 − 𝑇𝐾2 − 𝑇𝐵
Fuerza de rigidez:
𝑓𝐾 = 𝐾𝜃
𝑑2 𝜃
𝐽 2 =
𝑑𝑡
Fuerza del amortiguador:
Masa 𝑱𝟏 :
𝐽1 𝜃1 = 𝑇1 𝑆 − 𝑘1 𝜃1 − 𝜃1
Masa 𝑱𝟐
𝐽2 𝜃2 = −𝑘1 𝜃2 − 𝜃1 − 𝑘2 𝜃2 − 𝐵𝜃2
𝑇
𝑖
𝑓𝑏 = 𝑏
𝑑𝜃
𝑑𝑡
Luis Edo García Jaimes
EJERCICIOS
Obtener las ecuaciones diferenciales que describen la dinámica de los siguientes
sistemas mecánicos rotacionales
Luis Edo García Jaimes
SISTEMAS ELÉCTRICOS
Ley de Ohm: La corriente eléctrica (I) en un conductor (o circuito), es igual a la
diferencia de potencial (V) sobre el conductor (o circuito), dividido porla resistencia
(R) que opone a su paso.
𝐼=𝑉 𝑅
Leyes de Kirchhoff
1. Ley de corrientes (KCL): En cualquier nodo, la suma de las corrientes que
entran a ese nodo es igual a la suma de las corrientes que salen. De forma
equivalente, la suma algebraica de todas las corrientes que pasan por el nodo es
igual a cero.
𝑖𝑒 −
𝑖𝑠 = 0
2. Ley de Voltajes (KVL): La suma algebraica de las diferencias de potencial
eléctrico en un lazo cerrado es igual a cero.
Luis Edo García Jaimes
𝑉𝑖 = 0
SISTEMAS ELÉCTRICOS (1)
𝑖1 − 𝑖2 − 𝑖3 = 0
𝑅2 𝑖2 − 𝜀1 + 𝑅1 𝑖1 = 0
𝑅3 𝑖3 + 𝜀2 + 𝜀1 − 𝑅2 𝑖2 = 0
Luis Edo García Jaimes
EJEMPLO SISTEMA ELÉCTRICO SERIE
Hallar la ecuación diferencial que modela el circuito de la figura
Utilizando KVL:
𝑉𝑅 + 𝑉𝐿 + 𝑉𝐶 = 𝑉
𝑑𝑖
𝑉𝐿 = 𝐿
𝑑𝑡
𝑉𝑅 = 𝑖. 𝑅
𝑖. 𝑅 + 𝐿
𝑑𝑄
𝑑2 𝑄 1
𝑅
+𝐿 2 + 𝑖 =𝑉
𝑑𝑡
𝑑𝑡
𝐶
𝑑𝑖 1
+
𝑑𝑡 𝐶
→
Luis Edo García Jaimes
𝑖𝑑𝑡 = 𝑉
1
𝑉𝑐 =
𝐶
𝑖=
𝑖𝑑𝑡
𝑑𝑄
𝑑𝑡
𝑑2 𝑄
𝑑𝑄 1
𝐿 2 + 𝑅
+ 𝑖=𝑉
𝑑𝑡
𝑑𝑡 𝐶
EJEMPLO CIRCUITO RLC PARALELO
Hallar la ecuación diferencial que modela el circuito de la figura
Utilizando KCL:
𝐼𝑅 + 𝐼𝐿 + 𝐼𝐶 = 𝐼𝑆
𝑉𝑆
𝐼𝑅 =
𝑅
𝑉𝑆 1
+
𝑅 𝐿
𝑑𝑉𝑆
𝑉𝑆 𝑑𝑡 + 𝐶
= 𝑉𝑆
𝑑𝑡
1 𝑑𝜙 1
𝑑2 𝜙
+ 𝜙 + 𝐶 2 = 𝑉𝑆
𝑅 𝑑𝑡 𝐿
𝑑𝑡
1
𝐼𝐿 =
𝐿
𝑉𝑆 𝑑𝑡
𝑑𝑉𝑆
𝐼𝐶 = 𝐶
𝑑𝑡
𝑑𝜙
𝑉𝑆 =
𝑑𝑡
→
Luis Edo García Jaimes
𝑑2 𝜙 1 𝑑𝜙 1
𝐶 2 +
+ 𝜙 = 𝑉𝑆
𝑑𝑡
𝑅 𝑑𝑡 𝐿
MOTOR DE CORRIENTE DC CONTROLADO POR
ARMADURA
𝑅𝑎 =Resistencia de la armadura Ω
𝐿𝑎 =Inductancia de la armadura [H]
𝑖𝑎 =Corriente en la armadura [A]
𝑖𝑓 =Corriente del campo [A]
𝑒𝑎 =Voltaje de armadura [V]
𝑒𝑏 =Fuerza contra electromotriz [V]
𝜃 =Desplazamiento angular del eje del motor [rad]
𝑇 =Torque desarrollado por el motor [N.m]
𝐽 =Momento de inercia de la carga [Kg.m]
𝑏 =Coeficiente de fricción viscosa equivalente del motor y la carga [N.m/rad/s]
Luis Edo García Jaimes
MODELO MATEMÁTICO DEL MOTOR DE CD
Subsistema eléctrico: La armadura es un conductor, con una resistencia 𝑅𝑎 y
una inductancia 𝐿𝑎 en donde además, se genera una fuerza contraelectromotriz 𝑒𝑏
𝑑𝑖𝑎
𝑅𝑎 𝑖𝑎 + 𝐿
+ 𝑒𝑏 = 𝑒𝑎
𝑑𝑡
1.
Subsistema magnético: La circulación de corriente por las bobinas genera un
torque que es proporcional a la corriente en la armadura y la velocidad de giro del
motor produce la fuerza contraelectromotriz proporcional a la velocidad de giro.
𝑑𝜃
𝑒𝑏 = 𝐾𝑏
𝑑𝑡
𝑇𝑚 = 𝐾𝑚 𝑖𝑎
2.
Subsistema Mecánico: El par mecánico 𝑇𝑚 del motor se emplea para imprimir
aceleración angular a la carga y en vencer la fuerza de fricción.
𝑑2 𝜃
𝑑𝜃
𝐽 2 +𝑏
= 𝑇𝑚
𝑑𝑡
𝑑𝑡
3.
Combinando las ecuaciones 1, 2 y 3 resulta:
𝐽𝐿𝑎 𝜃 + 𝐽𝑅𝑎 + 𝑏𝐿𝑎 𝜃 + 𝑏𝑅𝑎 + 𝐾𝑏 𝐾𝑚 𝜃 = 𝐾𝑚 𝑒𝑎
Luis Edo García Jaimes
LA TRANSFORMADA DE LAPLACE
La transformada de Laplace convierte cierto tipo de ecuaciones diferenciales en
ecuaciones algebraicas. De este modo, cuando se resuelve la ecuación algebraica,
queda también resuelta la ecuación diferencial correspondiente.
Definición: la transformada de Laplace de una función 𝑓(𝑡) definida para todo en
el intervalo 0 ∞ 0; se define así:
∞
𝑓(𝑡)𝑒 −𝑆𝑡 𝑑𝑡
ℒ 𝑓(𝑡) = 𝐹 𝑆 =
0
Ejemplo: Sea 𝑓 (𝑡) = 1, hallar ℒ 𝑓(𝑡)
∞
ℒ 𝑓(𝑡) = 𝐹 𝑆 =
0
1 −𝑆𝑡
−𝑆𝑡
1 ∗ 𝑒 𝑑𝑡 = − 𝑒
𝑆
Luis Edo García Jaimes
∞
0
1
𝐹 𝑆 =
𝑆
EJEMPLOS DE TRANSFORMADA DE LA PLACE
Ejemplo: Sea 𝑓 (𝑡) = 𝑡, hallar ℒ 𝑓(𝑡)
∞
ℒ 𝑓(𝑡) = 𝐹 𝑆 =
0
−𝑆𝑡
𝑒
𝑡. 𝑒 −𝑆𝑡 𝑑𝑡 = −
𝑆𝑡 + 1
2
𝑆
∞
0
1
𝐹 𝑆 = 2
𝑆
En este caso se utilizó la integral por partes:
𝑢𝑑𝑣 = 𝑢. 𝑣 −
𝑣𝑑𝑢
Ejemplo: Sea 𝑓 𝑡 = cos 𝑎𝑡 hallar ℒ 𝑓 𝑡
∞
ℒ 𝑓(𝑡) = 𝐹 𝑆 =
0
−𝑆𝑡
𝑒
𝑎. 𝑠𝑒𝑛𝑎𝑡 − 𝑆𝑐𝑜𝑠𝑎𝑡
−𝑆𝑡
cos 𝑎𝑡 𝑒 𝑑𝑡 =
𝑆 2 + 𝑎2
∞
0
𝑆
= 2
𝑆 + 𝑎2
Nuevamente se utilizó la integral por partes:
𝑢𝑑𝑣 = 𝑢. 𝑣 −
𝑣𝑑𝑢
𝑢 = 𝑒 −𝑆𝑡
𝑑𝑣 = 𝑐𝑜𝑠𝑎𝑡
Luis Edo García Jaimes
PROPIEDADES DE LA TRANSFORMADA DE LAPLACE
1. Propiedad de linealidad: Si ℒ 𝑓(𝑡) = 𝐹(𝑆) y ℒ 𝑔(𝑡) = 𝐺 𝑆 entonces:
ℒ 𝑎𝑓(𝑡) + 𝑏𝑔(𝑡)} = 𝑎ℒ𝑓 𝑡 + 𝑏ℒ𝑔 𝑡 = 𝑎𝐹 𝑆 + 𝑏𝐺(𝑆)
Ejemplo:
Hallar ℒ 3𝑠𝑒𝑛4𝑡 − 2𝑐𝑜𝑠4𝑡
3∗4
2𝑆
ℒ 3𝑠𝑒𝑛4𝑡 − 2𝑐𝑜𝑠4𝑡 = 3ℒ 𝑠𝑒𝑛4𝑡 − 2ℒ 𝑐𝑜𝑠4𝑡 = 2
− 2
𝑆 + 16 𝑆 + 16
12 − 2𝑆
ℒ 3𝑠𝑒𝑛4𝑡 − 2𝑐𝑜𝑠4𝑡 = 2
𝑆 + 16
syms t
f=3*sin(4*t)-2*cos4*t
FS=laplace(f)
Luis Edo García Jaimes
PROPIEDADES DE LA TRANSFORMADA DE LAPLACE
2.
Segunda
propiedad
de
𝑃𝑖𝑚𝑒𝑟 𝑐𝑎𝑠𝑜:
traslación:
Si
ℒ 𝑓(𝑡) = 𝐹(𝑆)
entonces:
ℒ 𝑓(𝑡 − 𝑎)𝑢(𝑡 − 𝑎) = 𝑒 −𝑎𝑆 ℒ𝑓(𝑡)
𝑆𝑒𝑔𝑢𝑛𝑑𝑜 𝑐𝑎𝑠𝑜:
ℒ 𝑓(𝑡)𝑢(𝑡 − 𝑎) = 𝑒 −𝑎𝑆 ℒ𝑓(𝑡 + 𝑎)
Ejemplo: Hallar ℒ 𝑡 − 5 3 𝑢(𝑡 − 5)
ℒ 𝑡 − 5 3 𝑢(𝑡 − 5) = 𝑒 −5𝑠 ℒ 𝑡 3
6𝑒 −5𝑆
=
𝑆4
Ejemplo: Hallar ℒ 𝑡 3 𝑢(𝑡 − 5)
ℒ 𝑡 2 𝑢(𝑡 − 5) = 𝑒 −5𝑆 ℒ 𝑡 + 5
2
= 𝑒 −5𝑆 ℒ 𝑡 2 + 10𝑡 + 25
2 −5𝑆
2
10
25
2
+
10𝑆
+
25𝑆
𝑒
2
−5𝑆
ℒ 𝑡 𝑢(𝑡 − 5) = 3 + 2 +
𝑒
=
𝑆
𝑆
𝑆
𝑆3
Luis Edo García Jaimes
PROPIEDADES DE LA TRANSFORMADA DE LAPLACE
3. Transformada de una derivada: Si ℒ 𝑓(𝑡) = 𝐹(𝑆) entonces:
ℒ 𝑓′ 𝑡
= 𝑆𝐹 𝑆 − 𝑓(0)
ℒ 𝑓 ′′ (𝑡) = 𝑆 2 𝐹 𝑆 − 𝑆𝑓 0 − 𝑓 ´ 0
ℒ 𝑓 ′′′ 𝑡
= 𝑆 3 𝐹 𝑆 − 𝑆 2 𝑓 0 − 𝑆𝑓 ′ 0 − 𝑓 ′′ (0)
Ejemplo: dada la ecuación diferencial
𝑑2 𝑦
𝑑𝑦
+8
+ 15𝑦 = 5𝑢
𝑑𝑡 2
𝑑𝑡
𝑌(𝑆)
Con 𝑓 ′ 0 = 0, 𝑓 0 = 0, obtenga la relación 𝐺 𝑆 = 𝑈(𝑆)
Como las condiciones iniciales son iguales a cero, se obtiene:
𝑆 2 𝑌 𝑆 + 8𝑆𝑌 𝑆 + 15𝑌 𝑆 = 5𝑈 𝑆
2
𝑆 + 8𝑆 + 15 𝑌 𝑆 = 5𝑈 𝑆
𝑌(𝑆)
5
𝐺 𝑆 =
=
𝑈(𝑆) 𝑆 2 + 8𝑆 + 15
Luis Edo García Jaimes
TRANSFORMADA DE UNA DERIVADA
3. Transformada de una derivada: Si ℒ 𝑓(𝑡) = 𝐹(𝑆) entonces:
ℒ 𝑓′ 𝑡
= 𝑆𝐹 𝑆 − 𝑓(0)
ℒ 𝑓 ′′ (𝑡) = 𝑆 2 𝐹 𝑆 − 𝑆𝑓 0 − 𝑓 ´ 0
ℒ 𝑓 ′′′ 𝑡
= 𝑆 3 𝐹 𝑆 − 𝑆 2 𝑓 0 − 𝑆𝑓 ′ 0 − 𝑓 ′′ (0)
Ejemplo: dada la ecuación diferencial
𝑑2 𝑦
𝑑𝑦
+8
+ 15𝑦 = 5𝑢
2
𝑑𝑡
𝑑𝑡
𝑌(𝑆)
Con 𝑓 ′ 0 = 0, 𝑓 0 = 0, obtenga la relación 𝐺 𝑆 = 𝑈(𝑆)
Como las condiciones iniciales son iguales a cero, se obtiene:
𝑆 2 𝑌 𝑆 + 8𝑆𝑌 𝑆 + 15𝑌 𝑆 = 5𝑈 𝑆
2
𝑆 + 8𝑆 + 15 𝑌 𝑆 = 5𝑈 𝑆
𝑌(𝑆)
5
𝐺 𝑆 =
=
𝑈(𝑆) 𝑆 2 + 8𝑆 + 15
Luis Edo García Jaimes
TRANSFORMADA DE UNA INTEGRAL
4. Transformada de una integral: Si ℒ 𝑓(𝑡) = 𝐹(𝑆) entonces:
𝑡
ℒ
0
𝐹(𝑆)
𝑓 𝑡 𝑑𝑡 =
𝑆
Ejemplo: Hallar
𝑡
ℒ
𝑠𝑒𝑛2𝑡𝑑𝑡
0
sea 𝑓(𝑡) = 𝑠𝑒𝑛2𝑡
2
ℒ 𝑠𝑒𝑛2𝑡 = 2
𝑆 +4
𝑡
⟶ℒ
2
𝑠𝑒𝑛2𝑡𝑑𝑡 =
𝑆(𝑆 2 + 4)
0
Luis Edo García Jaimes
TRANSFORMADA DE UNA INTEGRAL (1)
Ejemplo: Hallar
𝑡
𝑒 −3𝑡 𝑐𝑜𝑠5𝑡𝑑𝑡
ℒ
0
En este caso se aplican dos propiedades: la propiedad de la transformada de la
integral y la primera propiedad de traslación
𝑆
ℒ 𝑐𝑜𝑠5𝑡 = 2
𝑆 + 25
𝑆
𝑆+5
𝑆+3
ℒ 𝑒 −3𝑡 𝑐𝑜𝑠5𝑡 = 2
=
=
𝑆 + 25 𝑆=𝑆+3
𝑆 + 3 2 + 25 𝑆 2 + 6𝑆 + 34
𝑡
ℒ
𝑒
0
−3𝑡
𝑆+5
𝑐𝑜𝑠5𝑡𝑑𝑡 =
𝑆 𝑆 2 + 6𝑆 + 34
Luis Edo García Jaimes
MULTIPLCACIÓN POR POTENCIAS DE t
5. Multiplicación por potencias de t: Si ℒ 𝑓(𝑡) = 𝐹(𝑆), entonces:
ℒ 𝑡 𝑛 𝑓(𝑡) = −1 𝑛 𝐹
𝑛
(𝑆)
Ejemplo: Hallar
ℒ 𝑡 1 − 𝑒 −4𝑡
Se hace 𝑓 𝑡 = 1 − 𝑒 −4𝑡
ℒ 1−𝑒
ℒ 𝑡 1−𝑒
−4𝑡
−4𝑡
1
1
4
= −
=
𝑆 𝑆 + 4 𝑆(𝑆 + 4)
𝑑
4
2𝑆 + 4
2(𝑆 + 2)
= (−1)
= 2
= 2
2
𝑑𝑆 𝑆(𝑆 + 4)
(𝑆 + 4𝑆)
𝑆 (𝑆 + 4)
1
Luis Edo García Jaimes
TRANSFORMADA DE UNA FUNCIÓN DIVIDIDA POR t
6. Transformada de la función dividida por 𝒕: Si ℒ 𝑓(𝑡) = 𝐹(𝑆), entonces,
𝑓(𝑡)
ℒ
=
𝑡
∞
𝐹 𝑆 𝑑𝑠
𝑆
Ejemplo: Hallar
𝑠𝑒𝑛5𝑡
ℒ
𝑡
Se hace 𝑓 𝑡 = 𝑠𝑒𝑛5𝑡
5
ℒ 𝑠𝑒𝑛5𝑡 = 2
𝑆 + 25
𝑠𝑒𝑛5𝑡
ℒ
=
𝑡
∞
𝑆
5
−1
𝑑𝑆
=
𝑡𝑎𝑛
5𝑆
2
𝑆 + 25
Luis Edo García Jaimes
∞
=
𝑆
𝜋
− 𝑡𝑎𝑛−1 5𝑆
2
TRANSFORMADA INVERSA DE LAPLACE
Es el proceso matemático de pasar de la expresión en el dominio de Laplace a
la expresión en el dominio del tiempo.
Por lo general, se utiliza el siguiente procedimiento
Utilizar tablas cuando las expresiones son sencillas.
Utilizar tablas y las propiedades de la transformada.
Utilizar fracciones parciales, tablas y las propiedades de la transformada en
caso de expresiones complejas.
Utilizar programas de software especializados (Matlab, wolfram….)
Luis Edo García Jaimes
EJEMPLO DE TRANSFORMADA INVERSA DE LAPLACE
Ejemplo: Hallar
ℒ −1
5
20𝑆
+
𝑆2 + 4 𝑆2 + 9
𝑏
𝑆
ℒ
𝑐𝑜𝑠
𝑏𝑡
=
𝑆 2 + 𝑏2
𝑆 2 + 𝑏2
5
5
2
5
ℒ −1 2
= ℒ −1 2
=
𝑠𝑒𝑛(2𝑡)
𝑆 +4
2
𝑆 + 22
2
20𝑆
𝑆
−1
−1
ℒ
= 20ℒ
= 20cos
(3𝑡)
𝑆2 + 9
𝑆 2 + 32
5
20𝑆
5
−1
ℒ
+
= 𝑠𝑒𝑛 2𝑡 + 20cos
(3𝑡)
𝑆2 + 4 𝑆2 + 9
2
ℒ 𝑠𝑒𝑛 𝑏𝑡
=
syms S;
FS=5/(S^2+4)+20*S/(S^2+9)
x=ilaplace(FS)
ezplot(x,[0,10])
grid on
xlabel('t')
ylabel('x')
Luis Edo García Jaimes
EJEMPLO DE TRANSFORMADA INVERSA DE LAPLACE
Hallar
ℒ −1
15𝑆 + 5
(𝑆 + 5)(𝑆 + 3)(𝑆 + 10)
Se descompone la expresión en fracciones parciales:
15𝑆 + 5
𝐴
𝐵
𝐶
=
+
+
(𝑆 + 5)(𝑆 + 3)(𝑆 + 10) 𝑆 + 5 𝑆 + 3 𝑆 + 10
15𝑆 + 5
𝐴=
𝑆 + 3 𝑆 + 10
15𝑆 + 5
𝐵=
𝑆 + 5 𝑆 + 10
=7
𝑆=−5
𝐶=
15𝑆 + 5
(𝑆 + 5)(𝑆 + 3)
= −2.8571
𝑆=−3
= −4.1429
𝑆=−10
15𝑆 + 5
7
2.8571 4.1429
=
−
−
(𝑆 + 5)(𝑆 + 3)(𝑆 + 10) 𝑆 + 5
𝑆+3
𝑆 + 10
ℒ 𝑒 −𝑎𝑡 =
ℒ −1
1
𝑆+𝑎
7
2.8571 4.1429
−
−
= 7𝑒 −5𝑡 − 2.8571𝑒 −3𝑡 − 4.1429𝑒 −10𝑡
𝑆+5
𝑆+3
𝑆 + 10
Luis Edo García Jaimes
EJEMPLO DE TRANSFORMADA INVERSA DE LA PLACE
Hallar
2
𝑆+4
ℒ −1
+
2
3
5(𝑆 + 1)
+
𝑆 2 + 16 𝑆 2 + 2𝑆 + 5
De tablas:
ℒ
−1
1
𝑆+𝑎
2
= 𝑡𝑒
−𝑎𝑡
ℒ
−1
𝑏
= 𝑠𝑒𝑛 𝑏𝑡
𝑆 2 + 𝑏2
ℒ
−1
𝑆+𝑎
= 𝑒 −𝑎𝑡 cos
(𝑏𝑡)
2
2
𝑆+𝑎 +𝑏
La expresión dada se puede escribir como:
2ℒ
−1
1
𝑆+4
2
3 −1
4
−1
+ ℒ
+
5ℒ
4
𝑆 2 + 16
(𝑆 + 1)
𝑆+1 2+4
Por tanto:
ℒ
−1
2
𝑆+4
3
5(𝑆 + 1)
−4𝑡
−𝑡
+
+
=
2𝑡𝑒
+
0.75𝑠𝑒𝑛
4𝑡
+
5𝑒
cos
(2𝑡)
2
𝑆 2 + 16 𝑆 2 + 2𝑆 + 5
Luis Edo García Jaimes
TEOREMA DEL VALOR FINAL
Si se conoce la transformada de Laplace de una función 𝑓(𝑡), el valor final de dicha
función puede obtenerse multiplicando 𝐹(𝑠) por 𝑆 y evaluando el límite:
lim 𝑓(𝑡) = lim 𝑆𝐹(𝑆)
𝑡→∞
𝑡→0
El teorema del valor final indica que valor definitivo alcanza la respuesta de un
sistema, es decir, en qué valor e estabiliza la respuesta del sistema.
Ejemplo: La transformada de Laplace de cierto sistema térmico está dada por
2𝑆 + 3
𝐹 𝑆 = 3
𝑆 + 3𝑆 2 + 5𝑆
¿Cuál es el valor final que alcanza la respuesta del sistema?
2𝑆 + 3
2𝑆 + 3
3
lim 𝑓(𝑡) = lim 𝑆. 3
= lim 𝑆.
= = 0.6
𝑡→∞
𝑆→0
𝑆 + 3𝑆 2 + 5𝑆 𝑆→0 𝑆(𝑆 2 + 3𝑆 + 5) 5
Luis Edo García Jaimes
TEOREMA DEL VALOR INICIAL
Si se conoce la transformada de Laplace de una función 𝑓(𝑡), el valor inicial de dicha
función puede obtenerse multiplicando 𝐹(𝑠) por 𝑆 y evaluando el límite:
lim 𝑓(𝑡) = lim 𝑆𝐹(𝑆)
𝑡→0
𝑡→∞
El teorema del valor inicial permite calcular el valor de la condición inicial del
sistema.
Ejemplo: La transformada de Laplace de cierto sistema térmico está dada por
2𝑆 + 3
𝐹 𝑆 = 3
𝑆 + 3𝑆 2 + 5𝑆
¿Cuál es el valor inicial del sistema?
lim 𝑓(𝑡) = lim 𝑆.
𝑡→0
𝑆→∞
2𝑆 + 3
2𝑆 + 3
=
lim
𝑆.
=0
3
2
2
𝑆→∞
𝑆 + 3𝑆 + 5𝑆
𝑆(𝑆 + 3𝑆 + 5)
Luis Edo García Jaimes
FUNCIÓN DE TRANSFERENCIA
La función de transferencia 𝐺(𝑠), de un sistema lineal e invariante en el tiempo, se
define como la relación entre la transformada de Laplace de salida 𝑦(𝑡) y la
transformada de Laplace de la entrada 𝑟(𝑡), con condiciones iniciales iguales a cero.
La función de transferencia de un sistema se puede obtener de forma teórica a
través de las ecuaciones diferenciales de su modelo matemático, en este caso se
dice que se utiliza un método fenomenológico.
La función de transferencia también se puede obtener en forma experimental
tomando datos de los valores de la señal de entrada aplicada al proceso y de los
valores de la respuesta obtenida, en este caso se dice que se utiliza el método de
identificación de procesos.
Luis Edo García Jaimes
PROPIEDADES DE LA FUNCIÓN DE TRANSFERENCIA
La función de transferencia es una propiedad intrínseca del sistema. Conocida la
función de transferencia del sistema, se puede conocer el comportamiento del
mismo ante cualquier tipo de entrada.
La función de transferencia responde a la ecuación diferencial resultante que
gobierna un sistema, pero no ofrece información acerca de su configuración
interna.
Dos sistemas físicos diferentes pueden poseer idénticas funciones de
transferencia.
La función de transferencia es independiente de la magnitud y la naturaleza de la
señal de entrada.
El denominador de la función de transferencia igualado a cero se denomina
“Ecuación característica” y determina el comportamiento dinámico del sistema.
Luis Edo García Jaimes
EJEMPLO DE FUNCIÓN DE TRANSFERENCIA
La entrada a cierto sistema neumático es 𝑟(𝑡) = 2𝑢(𝑡) y la salida correspondiente a
esa entrada es 𝑦 𝑡 = 4(1 − 𝑒 −5𝑡 ) cual es su función de transferencia?
La función de transferencia es:
𝑌(𝑆)
𝐺 𝑆 =
𝑅(𝑆)
𝑌 𝑆 = ℒ 4(1 − 𝑒
−5𝑡
1
1
20
) =4 −
=
𝑆 𝑆+5
𝑆(𝑆 + 5)
20
𝑌(𝑆) 𝑆(𝑆 + 5)
𝐺 𝑆 =
=
2
𝑅(𝑆)
𝑆
2
𝑅 𝑆 = ℒ 2𝑢(𝑡) =
𝑆
𝑌(𝑆)
10
𝐺 𝑆 =
=
𝑅(𝑆) 𝑆 + 5
Luis Edo García Jaimes
FUNCIÓN DE TRANSFERENCIA A PARTIR DE LA
ECUACIÓN DIFERENCIAL QUE MODELA AL
SISTEMA
Cierto sistema de control está descrito mediante la ecuación diferencial:
𝑑2 𝑦(𝑡)
𝑑𝑦(𝑡)
+2
+ 5𝑦 𝑡 = 3𝑟(𝑡)
𝑑𝑡 2
𝑑𝑡
Obtener su función de transferencia.
Tomando la Transformada de Laplace a la ecuación diferencial con condiciones
iniciales iguales a cero, se obtiene:
𝑆 2 𝑌 𝑆 + 2𝑆𝑌 𝑆 + 5𝑌 𝑆 = 3𝑅(𝑆)
2
𝑆 + 2𝑆 + 5 𝑌 𝑆 = 3𝑅 𝑆
𝑌(𝑆)
3
→ 𝐺 𝑆 =
= 2
𝑅(𝑆) 𝑆 + 2𝑆 + 5
Luis Edo García Jaimes
FUNCIÓN DE TRANSFERENCIA A PARTIR DE LA
ECUACIÓN DIFERENCIAL QUE MODELA AL SISTEMA
Hallar la función de transferencia de:
𝑦 𝑡 + 3𝑦 𝑡 + 2𝑦 𝑡 + 𝑦 𝑡 = 𝑢 𝑡 + 2𝑢(𝑡)
La salida del sistema es 𝑦(𝑡)
y su salida es 𝑢(𝑡), por tanto su función de
transferencia es:
𝑌(𝑆)
𝐺 𝑆 =
𝑈(𝑆)
Tomando la transformada de Laplace a la ecuación diferencial, considerando las
condiciones iniciales iguales a cero:
𝑆 3 + 3𝑆 2 + 2𝑆 + 1 𝑌 𝑆 = 𝑆 + 2 𝑈(𝑆)
𝑌(𝑆)
𝑆+2
𝐺 𝑆 =
=
𝑈(𝑆) 𝑆 3 + 3𝑆 2 + 2𝑆 + 1
Luis Edo García Jaimes
DIAGRAMAS DE BLOQUES
El diagrama de bloques es una forma de representar gráficamente las relaciones
entre las variables de un sistema. Se usa para representar el flujo de señales y la
función realizada por los componentes del sistema.
El diagrama de bloques de un sistema se puede construir a partir de las ecuaciones
diferenciales que lo gobiernan. El procedimiento es siempre igual, primero se toman
las transformadas de Laplace de estas ecuaciones, con la suposición de
condiciones iniciales iguales a cero. Posteriormente cada ecuación en el dominio de
Laplace se representa en forma de bloque. Finalmente se unen los elementos para
formar un único diagrama para todo el sistema.
Luis Edo García Jaimes
SISTEMA CON REALIMENTACIÓN NEGATIVA NO
UNITARIA
Los sistemas de realimentación negativa son los más extendidos para el control de
sistemas, por eso su estructura se estudia de forma pormenorizada. En la Figura se
representa el caso más simple de sistema de realimentación negativa no unitaria.
𝑅(𝑆): Señal de referencia o set-point
𝑌(𝑆): Señal de salida o variable controlada
𝐵(𝑆): Señal de realimentación
𝐸(𝑆): Señal de error. 𝐸(𝑆) = 𝑅(𝑆) − 𝐵(𝑆)
𝐺(𝑆): Función de transferencia del sistema o proceso
H(S): Función de transferencia del sistema de medición
Luis Edo García Jaimes
TIPOS DE FUNCIONES DE TRANSFERENCIA
Función de transferencia directa: Relaciona la señal de salida con la señal de
error:
𝐺𝐷 𝑆 =
𝑌 𝑆
= 𝐺(𝑆)
𝐸 𝑆
Función de transferencia de lazo abierto: Relaciona la señal de
realimentación con la señal de error. Es el producto de todas las funciones de
transferencia que se encuentran dentro del lazo de control.
𝐺𝐿𝐴 𝑆 =
𝐵(𝑆)
= 𝐺 𝑆 . 𝐻(𝑆)
𝐸(𝑆)
Función de transferencia de lazo cerrado: Es la que relaciona la señal de
salida con la señal de referencia o set-point.
𝐺𝑤 𝑆 =
𝐺(𝑆)
1 + 𝐺 𝑆 . 𝐻(𝑆)
Luis Edo García Jaimes
SISTEMA CON REALIMENTACIÓN NEGATIVA EN
PRESENCIA DE PERTURBACIONES
En este caso, la salida debe darse en función de las dos entradas al sistema: la
referencia 𝑅(𝑆) y la perturbación 𝑉(𝑆).
𝑌 𝑆 = 𝐺2 𝑆 𝑃(𝑆)
𝑃 𝑆 = 𝑈 𝑆 + 𝑉(𝑆)
𝐺1 (𝑆)𝐺2 (𝑆)
𝐺2 𝑆
𝑈 𝑆 = 𝐺1 𝑆 𝐸(𝑆) → 𝑌 𝑆 =
∗𝑅 𝑆 +
∗ 𝑉(𝑆)
1 + 𝐺1 (𝑆)𝐺2 (𝑆)𝐻(𝑆)
1 + 𝐺1 𝑆 𝐺2 𝑆 𝐻 𝑆
𝐸 𝑆 = 𝑅 𝑆 − 𝐵(𝑆)
𝐵 𝑆 = 𝐻 𝑆 𝑌(𝑆)
Luis Edo García Jaimes
REGLAS DEL ALGEBRA DE DIAGRAMAS DE BLOQUES
Un diagrama de bloques con varios lazos de realimentación se puede simplificar mediante un
reordenamiento de los bloques utilizando las reglas del álgebra de diagramas de bloques.
Luis Edo García Jaimes
REGLAS DEL ÁLGEBRA DE DIAGRAMAS DE BLOQUES
Luis Edo García Jaimes
EJEMPLO 1 SIMPLIFICACIÓN D. DE B.
Simplificar el siguiente diagrama de bloques:
La simplificación se inicia con los lazos más internos: en este caso un lazo de
realimentación (1) y dos bloques en paralelo (2)
Luis Edo García Jaimes
EJEMPLO 1: SIMPLIFICACIÓN D. DE B.
El nuevo diagrama queda en la siguiente forma:
A continuación, se resuelven los bloques en cascada y la realimentación con H2:
Luis Edo García Jaimes
EJEMPLO 2 :SIMPLIFICACIÓN D. DE B.
Simplificar el siguiente diagrama de bloques:
Se redistribuyen los puntos de suma de H2 y H3 y se pasa H1 después de G2
En el recuadro rojo, se hace una realimentación entre G2 y H2, mientras que en el recuadro
naranja se realiza la suma de H1/G2 con la ganancia 1
Luis Edo García Jaimes
EJEMPLO 2: SIMPLIFICACIÓN D. DE B.
Se multiplican los tres bloques en cascada del recuadro rojo y se simplifica el
resultado
Se resuelve el lazo de realimentación mostrado en el recuadro rojo y se simplifica,
finalmente se realiza el lazo con realimentación unitaria y se obtiene el resultado.
Luis Edo García Jaimes
EJEMPLO 3: SIMPLIFICACIÓN de D. de B. (1)
Reducir el diagrama de bloques de la figura
El punto de suma asociado a la función de transferencia individual 𝐺(𝑆) = 12
se reposiciona entre los dos primeros puntos de suma.
Luis Edo García Jaimes
EJEMPLO 3: SIMPLIFICACIÓN de D. de B. (2)
Los bloques enmarcados forman un lazo de realimentación y pueden reducirse a
una función de transferencia parcial 𝑇(𝑆) mediante la expresión:
1
1
∗
𝑆+4 𝑆
𝑇1 𝑆 =
1
1
1+
∗
𝑆 + 4 𝑆 ∗ 10
𝑇1 𝑆 =
1
𝑆 2 + 4𝑆 + 10
La figura muestra el resultado de sustituir la función de transferencia parcial 𝑇1 (𝑆).
Ahora se simplifica el lazo cerrado marcado en el recuadro:
1
1
∗
𝑆 2 + 4𝑆 + 10 𝑆 2 + 9
𝑇2 𝑆 =
1
1
1+ 2
∗ 2
∗ 12(𝑆 + 4)
𝑆 + 4𝑆 + 10 𝑆 + 9
𝑇2 𝑆 =
1
𝑆 4 + 4𝑆 3 + 19𝑆 2 + 49𝑆 + 144
Luis Edo García Jaimes
EJEMPLO 3: SIMPLIFICACIÓN de D. de B. (3)
El diagrama resultante queda así:
Finalmente se resuelve el lazo cerrado total:
𝐺𝑤
1
𝑆4 + 4𝑆3 + 19𝑆2 + 48𝑆 + 138
𝑆 =
1
1+ 4
∗ 𝑆+6
3
2
𝑆 + 4𝑆 + 19𝑆 + 48𝑆 + 138
1
𝐺𝑤 (𝑆) = 4
𝑠 + 4𝑆 3 + 19𝑆 2 + 49𝑆 + 144
La última expresión corresponde a la función de transferencia equivalente del
sistema
Luis Edo García Jaimes
EJERCICIOS SOBRE SIMPLIFICACÓN DE D. de B.
Obtenga la función de transferencia de lazo cerrado 𝐺𝑤 𝑆 = 𝐶(𝑆) 𝑅(𝑆) para cada
uno de los diagramas de bloques dados a continuación
Luis Edo García Jaimes
GRÁFICOS DE FLUJO DE SEÑALES
Un gráfico de flujo de señal es un diagrama que representa un conjunto de
ecuaciones algebraicas lineales simultáneas. Al aplicar el método de gráficos de
flujo de señal al análisis de sistemas de control, primero hay que transformar las
ecuaciones diferenciales lineales en ecuaciones algebraicas en S.
Un gráfico de flujo de señal contiene esencialmente la misma información que un
diagrama de bloques y está formado por los siguientes elementos:
Luis Edo García Jaimes
ELEMENTOS DEL DFS
Nodo: es un punto que representa una variable o señal.
Transmitancia: Es la ganancia entre dos nodos. Tales ganancias pueden
expresarse en términos de la función de transferencia entre dos nodos.
Rama: Es un segmento de línea con dirección y sentido, que une dos nodos.
Nodo de entrada o fuente: Es un nodo que sólo tiene ramas que salen. Esto
corresponde a una variable independiente.
Nodo de salida o sumidero: Es un nodo que sólo tiene ramas de entrada. Esto
corresponde a una variable dependiente.
Nodo mixto: Es un nodo que tiene tanto ramas que llegan, como ramas que salen.
Camino o trayecto: Es un recorrido de ramas conectadas en el sentido de las
flechas de las ramas. Si no se cruza ningún nodo más de una vez, el camino o
trayecto es abierto. Si el camino o trayecto finaliza en el mismo nodo del cual partió,
y no cruza ningún otro más de una vez, es un camino o trayecto cerrado.
Luis Edo García Jaimes
ELEMENTOS DEL DFS
Lazo: Es un camino o trayecto cerrado.
Ganancia de lazo: Es el producto de las ganancias de ramas de un lazo.
Lazos disjuntos: Son los lazos que no tienen ningún nodo común.
Trayecto o camino directo: Es el camino o trayecto de un nodo de entrada (fuente)
a un nodo de salida (sumidero), sin cruzar ningún nodo más de una vez.
Ganancia de trayecto directo: Es el producto de las ganancias de rama de un
camino o trayecto directo.
Luis Edo García Jaimes
COMO CONSTRUIR UN DFS A PARTIR DEL D. DE B.
Luis Edo García Jaimes
FÓRMULA DE GANANCIA DE MASON
La fórmula de ganancia de Mason, permite calcular la ganancia total entre un nodo
de entrada y un nodo de salida, es decir, la función de transferencia del sistema.
1
𝑃=
∆
𝑃𝐾 ∆𝐾
𝐾
𝑃𝐾 : Ganancia de la k-ésima trayectoria directa
𝛥: Determinante del gráfico
∆=1- (suma de todos los lazos de ganancias individuales) + (suma de los productos
de ganancia de todas las combinaciones posibles de dos lazos disjuntos) - (suma
de los productos de ganancia de todas las combinaciones posibles de tres lazos
disjuntos) +……
∆= 1 −
𝐿𝑎 +
𝑎
𝐿𝑏 𝐿𝑐 −
𝑏,𝑐
𝐿𝑑 𝐿𝑒 𝐿𝑓 + ⋯
𝑑,𝑒,𝑓
∆𝐾 : cofactor del determinante de la k-ésima trayectoria directa. ∆𝐾 se obtiene a
partir de Δ , quitando los lazos que tocan la trayectoria 𝑃𝐾
Luis Edo García Jaimes
EJEMPLO DE SIMPLIFICACIÓN DE DFS
Obtenga el DFS para el diagrama de bloques de la figura y la función de
transferencia 𝐺 𝑆 = 𝑌(𝑆) 𝑅(𝑆)
Luis Edo García Jaimes
FÓRMULA DE MASON PARA EL DFS DEL EJEMPLO
Trayectos directos:
𝑃1 = 𝐺1 𝐺2 𝐺3
Ganancias de lazo:
𝐿1 = −𝐺1 𝐺2 𝐻2
𝐿2 = −𝐺2 𝐺3 𝐻1
𝐿3 = −𝐺1 𝐺2 𝐺3
No existen lazos disjuntos
Determinante del sistema: ∆= 1 − 𝐿1 + 𝐿2 + 𝐿3 = 1 + 𝐺1 𝐺2 𝐻2 + 𝐺2 𝐺3 𝐻1 + 𝐺1 𝐺2 𝐺3
Cofactores:
∆1 = 1
Por lo tanto:
1
𝑃=
∆
𝑃𝐾 ∆𝐾
𝑃1 ∆1
𝑃=
∆
𝑌(𝑆)
𝐺1 𝐺2 𝐺3
𝑃=𝐺 𝑆 =
=
𝑅(𝑆) 1 + 𝐺1 𝐺2 𝐻2 + 𝐺2 𝐺3 𝐻1 + 𝐺1 𝐺2 𝐺3
Luis Edo García Jaimes
EJEMPLO DE SIMPLIFICACIÓN DE DFS (2)
Obtenga el DFS para el diagrama de bloques de la figura y la función de
transferencia 𝐺 𝑆 = 𝑌(𝑆) 𝑅(𝑆)
Luis Edo García Jaimes
FÓRMULA DE MASON DEL DFS DEL EJEMPLO (2)
Trayectos directos:
𝑃1 = 𝐺1 𝐺2 𝐺3 𝐺5
𝑃2 = 𝐺1 𝐺2 𝐺4 𝐺5
→ ∆1
→ ∆2
𝐿1 = −𝐺2 𝐻1
𝐿 = −𝐺5 𝐻2
Ganancias de lazo: 2
𝐿3 = −𝐺1 𝐺2 𝐺3 𝐺5
𝐿4 = −𝐺1 𝐺2 𝐺4 𝐺5
Lazos disjuntos:
𝐿1
𝐿2
Determinante del sistema: ∆= 1 − 𝐿1 + 𝐿2 + 𝐿3 + 𝐿4 + 𝐿1 𝐿2
∆= 1 + 𝐺2 𝐻1 + 𝐺5 𝐻2 + 𝐺1 𝐺2 𝐺3 𝐺5 + 𝐺1 𝐺2 𝐺4 𝐺5 + 𝐺2 𝐺5 𝐻1 𝐻2
Cofactores:
∆1 = 1
∆2 = 1
Por lo tanto:
1
𝑃=
∆
𝑃𝐾 ∆𝐾
𝑃1 ∆1 + 𝑃2 ∆2
𝑃=
∆
𝐶(𝑆)
𝐺1 𝐺2 𝐺3 𝐺5 + 𝐺1 𝐺2 𝐺4 𝐺5
𝑃=𝐺 𝑆 =
=
𝑅(𝑆) 1 + 𝐺2 𝐻1 + 𝐺5 𝐻2 + 𝐺1 𝐺2 𝐺3 𝐺5 + 𝐺1 𝐺2 𝐺4 𝐺5 + 𝐺2 𝐺5 𝐻1 𝐻2
Luis Edo García Jaimes
EJERCICIOS
Hallar la función de transferencia 𝐺 𝑆 para los siguientes diagramas de flujo.
Luis Edo García Jaimes
CARACTERÍSTICAS DE RESPUESTA TEMPORAL
Los sistemas se pueden clasificar con respecto al orden de la ecuación diferencial
que los define.
sistema de orden cero: se describe por una ecuación diferencial de orden cero y
corresponde a una relación proporcional entre variables de salida y entrada, por
ejemplo, el caso del potenciómetro:
𝑣𝑜 𝑡 = 𝐾𝜃(𝑡)
Sistema de primer orden: son aquellos que quedan definidos por medio de
ecuaciones diferenciales de primer orden; por ejemplo, un sistema térmico, un
sistema hidráulico, uno eléctrico, etcétera:
Luis Edo García Jaimes
CARACTERÍSTICAS DE RESPUESTA TEMPORAL (1)
Sistema de segundo orden: son aquellos que se definen por medio de ecuaciones
diferenciales de segundo orden, por ejemplo, el caso de los sistemas mecánicos,
tanto de rotación como de traslación.
Sistemas de orden superior: de tercer orden en adelante se generan cuando
varios subsistemas interactúan entre sí.
Luis Edo García Jaimes
SISTEMAS DE PRIMER ORDEN
Un sistema de primer orden es aquel que queda definido por una ecuación
diferencial de primer orden:
𝑑𝑦(𝑡)
𝜏
+ 𝑦(𝑡) = 𝐾𝑟(𝑡)
𝑑𝑡
Tomando la transformada de Laplace, con condiciones iniciales iguales a cero se
obtiene:
𝜏𝑆 + 1 𝑌 𝑆 = 𝐾𝑟(𝑆)
La función de transferencia del sistema de primer orden es:
𝑌(𝑆)
𝐾
𝐺 𝑆 =
=
𝑅(𝑆) 𝜏𝑆 + 1
𝐾 = Ganancia del sistema (factor de amplificación entre salida y entrada).
𝜏 = Constante de tiempo del sistema (segundos, min, Horas).
La constante de tiempo 𝜏 se define como el tiempo necesario para que la respuesta
del sistema alcance el 63.2% de su valor final.
Luis Edo García Jaimes
RESPUESTA DEL SISTEMA DE PRIMER ORDEN A
UNA ENTRDA EN FORMA DE ESCALÓN
La señal escalón se define como:
𝑟 𝑡 = 𝐴𝑢 𝑡 =
𝐴
0
𝑡≥0
𝑡<0
𝑅 𝑆 =
𝐴
𝑆
Para el sistema de primer orden:
𝐺 𝑆 =
𝑌 𝑆
𝐾
=
𝑅 𝑆
𝜏𝑆 + 1
→ 𝑌 𝑆 =
𝐾. 𝑅 𝑆
𝜏𝑆 + 1
→
𝑌 𝑆 =
𝐾𝐴
𝑆 𝜏𝑆 + 1
La transformada inversa de la última expresión da la respuesta del sistema de
primer orden al escalón:
𝑦 𝑡 = 𝐾. 𝐴 1 −
𝑡=0
𝑡=𝜏 3
𝑦 0 =0
𝑦 𝜏 3 = 0.283𝐾. 𝐴
𝑡 = 4𝜏
𝑡
−
𝑒 𝜏
𝑡=∞
𝑡=𝜏
𝑦 ∞ = 𝐾. 𝑎
𝑦 𝜏 = 0.632𝐾. 𝐴
𝑦 4𝜏 = 0.981𝐾. 𝐴
Luis Edo García Jaimes
VALOR DE ESTADO ESTABLE
Se considera que un sistema de control alcanza su valor de estado estable cundo
haya transcurrido un tiempo equivalente a cuatro constantes de tiempo. Este tiempo
se denomina tiempo de establecimiento
𝑡𝑠 = 4𝜏
Aplicando el teorema del valor final:
𝑦𝑆𝑆 = lim 𝑆𝐺 𝑆 = lim 𝑆
𝑆→0
𝑆→0
𝐾𝐴
= 𝐾𝐴
𝑆 𝜏𝑆 + 1
𝑌𝑆𝑆 = lim 𝑓(𝑡) = lim 𝐾𝐴(1 −
𝑡→
𝑡→
𝑡
−
𝜏
𝑒 )
= 𝐾𝐴
Luis Edo García Jaimes
EJEMPLO DE RESPUESTA AL ESCALÓN
La función de transferencia de cierto sistema térmico en lazo abierto está dada por:
𝑌(𝑆)
1.5
𝐺 𝑆 =
=
𝑅(𝑆) 5𝑆 + 1
Obtener la respuesta del sistema cuando la señal de entrada es un escalón de
magnitud 𝑟 𝑡 = 2𝑢(𝑡) . Los tiempos están en s.
De la función de transferencia se obtiene:
𝑌 𝑆 =
1.5𝑅(𝑆)
5𝑆 + 1
𝑅 𝑆 = ℒ 2𝑢(𝑡) =
2
𝑆
→
𝑌 𝑆 =
3
𝑆(5𝑆 + 1)
Para este sistema, la ganancia es 1.5 y la constante de tiempo es 𝜏 = 5 𝑠.
De tablas:
ℒ−
𝑎
= 1 − 𝑒 −𝑎𝑡
𝑆(𝑆 + 𝑎)
𝑡=0
𝑡=𝜏
𝑡 = 4𝜏
𝑡=∞
𝑦 𝑡 = 3 1 − 𝑒 −0.2𝑡
El tiempo de establecimiento es:
𝑌 𝑆 =3
𝑡𝑆 = 4𝜏
0.2
𝑆(𝑆 + 0.2)
𝑦 0 =0
𝑦 𝜏 = 1.896
𝑦 4𝜏 = 2.999
𝑦 ∞ =3
𝑡𝑆 = 20 𝑠.
Luis Edo García Jaimes
GRÁFICA DE LA RESPUESTA AL ESCALÓN
ℒ−
𝑎
= 1 − 𝑒 −𝑎𝑡
𝑆(𝑆 + 𝑎)
𝑦 𝑡 = 3 1 − 𝑒 −0.2𝑡
𝑌 𝑆 =3
𝑡=0
𝑡=𝜏
𝑡 = 4𝜏
𝑡=∞
0.2
𝑆(𝑆 + 0.2)
𝑦 0 =0
𝑦 𝜏 = 1.896
𝑦 4𝜏 = 2.999
𝑦 ∞ =3
Luis Edo García Jaimes
SISTEMA DE PRIMER ORDEN CON RETARDO (POR)
Tiempo de retardo: también llamado tiempo muerto, es el tiempo comprendido entre
el momento en que se produce un cambio en la señal de entrada y el momento en el
que se observa en la señal de salida el efecto de dicha variación.
La función de transferencia de un sistema de primer orden con retardo es:
′
𝑌(𝑆) 𝐾𝑒 −𝜃 𝑆
𝐺 𝑆 =
=
𝑅(𝑆) 𝜏𝑆 + 1
𝜃 ′ =Tiempo muerto o retardo
Luis Edo García Jaimes
APROXIMACIÓN TEÓRICA DE UNA CURVA REAL
A UN SISTEMA POR
Si se tiene la respuesta de un sistema ante una entrada en forma de escalón es
posible aproximar su dinámica a un sistema de primer orden con retardo (POR).
Luis Edo García Jaimes
PROCEDIMIENTO PARA OBTENER EL MODELO POR
Se eligen en la curva de respuesta los puntos para los cuales la respuesta alcanza el
28.3% y el 63.2% de su valor final, estos puntos se presentan cuando los tiempos
transcurridos a partir del momento de la aplicación del escalón, al elemento final de
control, son respectivamente 𝜃 ′ + 𝜏 3 y 𝜃 ´ + 𝜏
Con los datos obtenidos de la gráfica se plantean las siguientes ecuaciones:
𝜃′ +
𝜏
= 𝑡1
3
𝜃 ′ + 𝜏 = 𝑡2
Los valores de 𝑡1 y de 𝑡2 se calculan directamente de las gráficas o de la base de
datos obtenida. Resolviendo simultáneamente las dos ecuaciones se estiman los
valores de 𝜃 ′ y 𝜏.
Si al resolver las ecuaciones el valor de 𝜃 ′ es negativo, se asume que el sistema no
tiene retardo es decir, se hace 𝜃 ′ = 0 y por lo tanto 𝜏 = 𝑡2 .
Luis Edo García Jaimes
PROCEDIMIENTO…MODELO POR
El valor de la ganancia 𝐾 se obtiene mediante el cociente Δ𝑌 Δ𝑈 que se interpreta
como el cociente entre el cambio de la variable de salida y el cambio en la variable
de entrada (valor del escalón de entrada).
Δ𝑌
𝐾=
Δ𝑈
5.4
El modelo de la planta se obtiene reemplazando los valores de 𝐾, 𝜏 y 𝜃 ′ en la ecuación
del modelo POR
Una vez obtenido el modelo POR se debe validar para ver si ese modelo reproduce
adecuadamente los datos reales. En caso de que exista diferencia entre los datos
arrojados por el modelo obtenido y los datos reales , se debe repetir el proceso para
detectar posibles errores
Luis Edo García Jaimes
EJEMPLO:OBTENCIÓN MODELO POR
La figura muestra la respuesta de un sistema de temperatura cuando se varía la
apertura de la válvula de control del 30% al 40%. Aproxime el sistema a un modelo
POR
Luis Edo García Jaimes
SOLUCIÓN EJEMPLO MODELO POR
El modelo POR es:
′
𝑌(𝑆)
𝐾𝑒 𝜃
𝐺 𝑆 =
=
𝑈(𝑆) 𝜏𝑆 + 1
∆𝑈 = 40% − 30% = 10%
Δ𝑌
𝐾=
Δ𝑈
𝜏
= 𝑡1
3
𝜃 ′ + 𝜏 = 𝑡2
𝜃′ +
∆𝑌 = 35% − 20% = 15%
15%
𝐾=
= 1.5
10%
El 28.3% de la salida corresponde a: 20 + 0.283 ∗ 15 = 24.245% → 𝑡1 = 6.4 𝑚𝑖𝑛
El 63.2% de la salida corresponde a: 20 + 0.632 ∗ 15 = 29.48%
→ 𝑡2 = 13.2 𝑚𝑖𝑛
Por tanto:
𝜃′ +
𝜏
= 6.4
3
𝜃 ′ + 𝜏 = 13.2
Resolviendo las ecuaciones anteriores resulta: 𝜃 ′ = 3 min
𝜏 = 10.2 𝑚𝑖𝑛
El modelo POR da:
𝑌(𝑆)
1.5𝑒 −3𝑆
𝐺 𝑆 =
=
𝑈(𝑆) 10.2𝑆 + 1
Luis Edo García Jaimes
SISTEMAS DE SEGUNDO ORDEN
Un sistema de segundo orden es aquel que queda definido por una ecuación
diferencial de segundo orden:
𝑑2 𝑦(𝑡)
𝑑𝑦(𝑡)
2
2
+
2𝜉𝜔
+
𝜔
𝑦(𝑡)
=
𝐾𝜔
𝑟(𝑡)
𝑛
𝑛
𝑛
2
𝑑𝑡
𝑑𝑡
Tomando la transformada de Laplace, con condiciones iniciales iguales a cero se
obtiene:
𝑆 2 + 2𝜉𝜔𝑛 + 𝜔𝑛2 𝑌 𝑆 = 𝐾𝜔𝑛2 𝑅(𝑆)
La función de transferencia del sistema de primer orden es:
𝑌(𝑆)
𝐾𝜔𝑛2
𝐺 𝑆 =
= 2
𝑅(𝑆) 𝑆 + 2𝜉𝜔𝑛 + 𝜔𝑛2
𝐾 = Ganancia del sistema (factor de amplificación entre salida y entrada).
𝜉 = Coeficiente de amortiguamiento (adimensional)
𝜔𝑛 =Frcuencia natural del sistema [rad/s, rad/min...]
Luis Edo García Jaimes
RESPUESTA SISTEMA DE SEGUNDO ORDEN AL
ESCALÓN
La ecuación característica del sistema de segundo orden es:
𝑆 2 + 2𝜉𝜔𝑛 + 𝜔𝑛2 = 0
Las raíces de la ecuación característica o polos del sistema son:
𝑆1,2
−2𝜉𝜔𝑛 ± 4𝜉 2 𝜔𝑛2 − 4𝜔𝑛2
=
2
𝑆1,2 = −𝜉𝜔𝑛 ± 𝑗𝜔𝑛 1 − 𝜉 2
El tipo de respuesta del sistema de segundo orden lo determina el valor del
coeficiente de amortiguamiento así:
𝟎 < 𝝃 < 𝟏: Sistema subamortiguado: La ecuación característica tiene un par de
raíces conjugadas complejas. El sistema oscila y luego se estabiliza.
𝝃 = 𝟏: Sistema críticamente amortiguado: La ecuación tiene dos raíces reales e
iguales. El sistema no oscila.
𝝃 > 𝟏: Sistema sobreamortiguado: La ecuación tiene dos raíces reales distintas. El
sistema no oscila, pero su respuesta es más lenta que la del sistema subamortiguado
y la del críticamente amortiguado.
Luis Edo García Jaimes
RESPUESTA SISTEMA SEGUNDO ORDEN AL ESCALON
Luis Edo García Jaimes
UBICACIÓN DE POLOS Y RESPUESTA AL ESCALÓN
Luis Edo García Jaimes
PARÁMETROS DE RESPUESTA DE UN SISTEMA DE
SEGUNDO ORDEN AL ESCALÓN
La respuesta transitoria de un sistema en tiempo de segundo orden se caracteriza
por el tiempo de pico, el tiempo de crecimiento, el tiempo de establecimiento y el
máximo sobreimpulso. La figura muestra las especificaciones de respuesta
transitoria, de un sistema de segundo orden subamortiguado, ante una entrada en
escalón unitario.
Luis Edo García Jaimes
PARÁMETROS DE RESPUESTA SISTEMA SEGUNDO ORDEN
Tiempo de retardo (𝒕𝒅 ): Es el tiempo necesario para que la respuesta del sistema
alcance por primera vez, el 50% de su valor final.
𝑡𝑑 =
1 + 0.7𝜉
𝑤𝑛
1.1 + 0.125𝜉 + 0.46𝜉 2
𝑡𝑑 =
𝑤𝑛
0<𝜉<1
0<𝜉<1
Tiempo de crecimiento (𝒕𝒓 ): Es el tiempo que requiere la respuesta al escalón para
pasar del 10% al 90% de su valor final.
𝑡𝑟 =
0.8 + 2.5𝜉
𝑤𝑛
1 − 0.4167𝜉 + 2.9𝜉 2
𝑡𝑟 =
𝑤𝑛
0<𝜉<1
0<𝜉<1
Tiempo de pico (𝒕𝒑 ): Es el tiempo necesario para que la respuesta al escalón alcance
su máximo sobreimpulso.
𝜋
𝑡𝑝 =
𝑤𝑛 1 − 𝜉 2
0<𝜉<1
Luis Edo García Jaimes
PARÁMETROS DE RESPUESTA SISTEMA SEGUNDO ORDEN
Máximo sobreimpulso (𝑴𝒑 ): Es el valor máximo de la curva de respuesta al escalón
medido partir del valor de estado estable.
𝑐 𝑡𝑝 − 𝑐 ∞
𝑀𝑎𝑥𝑖𝑚𝑜 𝑠𝑜𝑏𝑟𝑒𝑖𝑚𝑝𝑢𝑙𝑠𝑜 =
∗ 100%
𝑐 ∞
En donde 𝑐(𝑡𝑝 ) representa el valor máximo alcanzado por la respuesta y 𝑐(∞)
representa el valor de estado estable de la misma.
𝑀𝑝 = 𝑒 −𝜋𝜉
1−𝜉 2
0<𝜉<1
Y, en forma porcentual:
𝑀𝑝 % = 100𝑒 −𝜋𝜉
1−𝜉 2
0<𝜉<1
Tiempo de establecimiento (𝒕𝒔 ): Es el tiempo requerido para que la curva de
respuesta al escalón alcance y se quede variando, alrededor de su valor final dentro
de un rango especificado en función de un porcentaje absoluto de su valor final. Este
valor es por lo general el 2%.
𝑡𝑠 =
4
𝜉𝑤𝑛
0<𝜉<1
𝑡𝑠 =
8𝜉
𝑤𝑛
𝜉≥1
Luis Edo García Jaimes
TIPO DE SISTEMA Y SUS PARÁMETROS
Luis Edo García Jaimes
EJEMPLO
Considere un sistema de segundo orden, en el que 𝜉 = 0.6 y 𝜔𝑛 = 5 𝑟𝑎𝑑/𝑠. Obtener
el tiempo de crecimiento 𝑡𝑟 , el tiempo pico 𝑡 𝑝 , el máximo sobreimpulso 𝑀𝑝 y el tiempo
de establecimiento 𝑡𝑠 cuando el sistema está sujeto a una entrada escalón unitario.
Tiempo de crecimiento o tiempo de subida:
𝑡𝑟 =
0.8 + 2.5𝜉 0.8 + 2.5 ∗ 0.6
=
𝑤𝑛
5
𝑡𝑟 = 0.46 𝑠.
Tiempo de pico:
𝑡𝑝 =
𝜋
𝑤𝑛 1 −
𝜉2
=
3.14
5 1−
𝑡𝑝 = 0.785 𝑠.
0.62
Máximo sobreimpulso:
𝑀𝑝 = 𝑒 −𝜋𝜉 /
1−𝜉 2
= 𝑒 −3.14∗0.6/
1−0.62
𝑀𝑝 = 0.0948
𝑀𝑝 = 9.48%
Tiempo de establecimiento:
4
𝑡𝑠 =
𝜉𝜔𝑛
0<𝜉<1
4
𝑡𝑠 =
0.6 ∗ 5
𝑡𝑠 = 1.33 𝑠.
Luis Edo García Jaimes
EJEMPLO
Para el sistema de la Figura , determine los valores de la ganancia 𝐾 y la constante
𝐾ℎ
en lazo cerrado para que el máximo sobreimpulso de la respuesta al escalón
unitario sea 0.2 y el tiempo pico sea 1 s. Con estos valores de 𝐾 y 𝐾ℎ obtenga el
tiempo de subida y el tiempo de establecimiento. Suponga que 𝑗 = 1 𝐾𝑔. 𝑚2 y que
𝐵 = 1 𝑁. 𝑚 𝑟𝑎𝑑 𝑠
La F de T del sistema en lazo cerrado es:
𝐾
𝑆(𝐽𝑆 + 𝐵 + 𝐾𝐾ℎ )
𝐺𝑤 𝑆 =
𝐾
1+
𝑆(𝐽𝑆 + 𝐵 + 𝐾𝐾ℎ )
𝐾
𝐺𝑤 𝑆 = 2
𝐽𝑆 + 𝐵 + 𝐾𝐾ℎ 𝑆 + 𝐾
Luis Edo García Jaimes
EJEMPLO (CONTINUACIÓN)
𝑘𝜔𝑛2
𝐺 𝑆 = 2
𝑆 + 2𝜉𝜔𝑛 𝑆 + 𝜔𝑛2
𝐾/𝐽
𝑆 =
𝐵 + 𝐾𝐾ℎ
𝐾
𝑆2 +
𝑆+
𝐽
𝐽
𝐺𝑤
Comparando las dos últimas ecuaciones con 𝐽 = 1 y 𝐵 = 1 resulta:
𝜔𝑛2
𝐾
=
𝐽
→
𝐾=
𝐵 + 𝐾𝐾ℎ
2𝜉𝜔𝑛 =
𝐽
𝜔𝑛2
→
2𝜉𝜔𝑛 − 𝐵
𝐾ℎ =
𝐾
Según las características del sistema de segundo orden y los datos dados:
𝑀𝑝 = 𝑒 −𝜋𝜉 /
𝑡𝑝 =
𝜋
𝜔𝑛 1 −
𝜉2
1−𝜉 2
𝜔𝑛 =
0.2 = 𝑒 −𝜋𝜉 /
𝜋
𝑡𝑝 1 −
𝜉2
=
1−𝜉 2
3.14
1∗ 1−
0.4552
→
𝜉 = 0.455
→ 𝜔𝑛 = 3.526 𝑟𝑎𝑑/𝑠
Entonces:
2 ∗ 0.455 ∗ 3.526 − 1
𝐾ℎ = 0.177 𝑠.
12.43
0.8 + 2.5𝜉 0.8 + 2.5 ∗ 0.455
𝑡𝑟 =
=
𝑡𝑟 = 0.549 𝑠.
𝑤𝑛
3.526
𝐾 = 3.5262
𝐾 = 12.43𝑁. 𝑚
𝐾ℎ =
4
4
𝑡𝑠 =
=
𝜉. 𝜔𝑛
0.455 ∗ 3.526
𝑡𝑠 = 2.49 𝑠
Luis Edo García Jaimes
EJEMPLO
Obtenga la respuesta a un escalón unitario y a la rampa unitaria del sistema que se
da a continuación. Utilice el MATLAB.
𝑌(𝑆)
6
𝐺 𝑆 =
=
𝑈(𝑆) 𝑆 2 + 4𝑆 + 8
num = [6];
den = [1 4 8];
sis=tf(num,den)
t = 0:0.02:30;
u=t;
y = step(sis,t); % Respuesta al escalon
figure(1)
plot(t,y)
grid
title('Respuesta a un escalón unitario')
xlabel('t (seg)')
ylabel('Salida')
y1 = lsim(sis,u,t);% Respuesta a la rampa
figure(2)
plot(t,t,'--',t,y1)
v = [0 30 0 30]; axis(v);
grid
title('Respuesta a una rampa unitaria')
xlabel('t (sec)')
ylabel('Entrada rampa unitaria y salida')
text(5,15,0,'Entrada rampa unitaria')
text(15,10,'Salida')
Luis Edo García Jaimes
ANÁLISIS DE ERROR EN RÉGIMEN PERMANENTE
En cualquier sistema físico de control existe un error inherente, que es el error en
estado estable en respuesta a determinados tipos de entradas. Puede ocurrir que un
sistema presente o no error en régimen permanente ante diferentes entradas.
TIPO DE UN SISTEMA: La función de transferencia en lazo abierto del sistema 𝐺(𝑠),
puede tener diversos polos y ceros y puede escribirse en la forma:
𝐾 𝜏1 𝑆 + 1 𝜏2 𝑆 + 1 … 𝑎1 𝑆 2 + 𝑏1 𝑆 + 1
𝐺 𝑆 = 𝑁
𝑆 𝜏1 𝑆 + 1 𝜏2 𝑆 + 1 … 𝑎2 𝑆 2 + 𝑏2 𝑆 + 1
El valor de 𝑁 en la función de transferencia en lazo abierto, determina el tipo del
sistema. Así: 𝑁 = 0, el sistema es tipo cero, 𝑁 = 1, el sistema es tipo 1, 𝑁 = 2, el
sistema es tipo 2
Luis Edo García Jaimes
ERROR DE ESTADO ESTABLE
Para el sistema de la figura, el error está dado por:
𝐸 𝑆 = 𝑅 𝑆 − 𝐻 𝑆 . 𝑌(𝑆)
𝑌 𝑆 = 𝐺 𝑆 .𝐸 𝑆
→
𝐸 𝑆 = 𝑅 𝑆 − 𝐻 𝑆 𝐺 𝑆 𝐸(𝑆)
𝑅(𝑆)
𝐸 𝑆 =
1 + 𝐺 𝑆 𝐻(𝑆)
Es decir, el error depende del tipo de entrada 𝑅(𝑆) y de la función de transferencia
de lazo abierto del sistema 𝐺𝐿𝐴 (𝑆) = 𝐺(𝑆)𝐻(𝑆)
Aplicando el teorema del valor final, el error de estado estable es:
𝑒𝑠𝑠 = lim 𝑓(𝑡) = lim 𝑆. 𝐸(𝑆)
𝑡→∞
𝑆→0
𝑅(𝑆)
𝑒𝑠𝑠 = lim 𝑆.
𝑆→0
1 + 𝐺 𝑆 𝐻(𝑆)
Luis Edo García Jaimes
ERROR ANTE UNA ENTRADA EN FORMA DE ESCALÓN
Error de posición: es el que se produce en el sistema ante una entrada escalón.
𝐴
𝑅 𝑆 =
𝑆
→
𝐴
𝐴
𝑒𝑠𝑠 = lim 𝑆.
=
𝑆→0
𝑆 1 + 𝐺 𝑆 𝐻(𝑆)
1 + lim 𝐺 𝑆 𝐻(𝑆)
𝑆→0
Se define: 𝑲𝒑 = Coeficiente de error de posición
𝐴
𝑒𝑠𝑠 =
1 + 𝐾𝑝
𝐾𝑝 = lim 𝐺 𝑆 𝐻(𝑆)
𝑆→0
𝐾𝑝 = lim 𝐺 𝑆 𝐻(𝑆)
𝑆→0
Luis Edo García Jaimes
ERROR ANTE UNA ENTRADA EN FORMA DE RAMPA
Error de velocidad: es el que se produce en el sistema ante una entrada en rampa.
𝐴
𝑅 𝑆 = 2
𝑆
→
𝐴
𝐴
𝑒𝑠𝑠 = lim 𝑆. 2
=
𝑆→0
𝑆 1 + 𝐺 𝑆 𝐻(𝑆)
𝑆 lim 𝐺 𝑆 𝐻(𝑆)
𝑆→0
Se define: 𝑲𝒗 = Coeficiente de error de velocidad
1
𝑒𝑠𝑠 =
𝐾𝑣
𝐾𝑣 = S. lim 𝐺 𝑆 𝐻(𝑆)
𝑆→0
𝐾𝑣 = lim S. 𝐺 𝑆 𝐻(𝑆)
𝑆→0
Luis Edo García Jaimes
ERROR ANTE UNA ENTRADA PARABÓLICA
Error de aceleración: es el que se produce en el sistema ante una entrada parábola.
𝐴
𝑅 𝑆 = 3
𝑆
→
𝐴
𝐴
𝑒𝑠𝑠 = lim 𝑆. 3
= 2
𝑆→0
𝑆 1 + 𝐺 𝑆 𝐻(𝑆)
𝑆 lim 𝐺 𝑆 𝐻(𝑆)
𝑆→0
Se define: 𝑲𝒂 = Coeficiente de error de aceleración
1
𝑒𝑠𝑠 =
𝐾𝑎
𝐾𝑎 = S 2 . lim 𝐺 𝑆 𝐻(𝑆)
𝑆→0
𝐾𝑣 = lim S 2 . 𝐺 𝑆 𝐻(𝑆)
𝑆→0
Luis Edo García Jaimes
CUADRO RESUMENN DE COEFICIENTES DE ERROR
𝑻𝒊𝒑𝒐
𝑬𝒔𝒄𝒂𝒍ó𝒏
𝒓 𝒕 =𝑨
𝑹𝒂𝒎𝒑𝒂
𝒓 𝒕 = 𝑨𝒕
0
𝐴
1 + 𝑘𝑝
𝑷𝒂𝒓á𝒃𝒐𝒍𝒂
𝟏
𝒓 𝒕 = 𝒕
𝟐
∞
∞
1
0
𝐴
𝑘𝑣
∞
2
0
0
𝐴
𝑘𝑎
Luis Edo García Jaimes
EJEMPLO
Si en el sistema de control de la figura 𝐺𝑐 = 50 determine el error de estado estable
a) Cuando la entrada 𝑉𝑟 es un escalón unitario b) Cuando la entrada 𝑉𝑟 es una rampa
unitaria. Asuma en ambos casos que la perturbación 𝑃 = 0. c) Cual sería el error si
la referencia es 𝑉𝑟 = 1𝑢(𝑡) y la perturbación 𝑃 = 0.5𝑢 𝑡 ?
Entrada escalón
𝑉𝑟 = 𝑢 𝑡
𝑒𝑠𝑠
𝐴
=
1 + 𝐾𝑝
𝑃=0
𝐺 𝑆 𝐻 𝑆 =
𝐾𝑃 = lim 𝐺 𝑆 𝐻(𝑆)
𝑆→0
𝑒𝑠𝑠 =
1
1 + 1.5
15
→
2
(𝑆 + 10)(𝑆 + 1)
Sistema Tipo 0
15
𝐾𝑝 = lim
= 1.5
𝑆→0 (𝑆 + 10)(𝑆 + 1)2
𝑒𝑠𝑠 = 0.4
𝑒𝑠𝑠 = 40 %
Luis Edo García Jaimes
EJEMPLO (CONTINUACIÓN)
Entrada Rampa
𝑉𝑟 = 𝑡𝑢 𝑡
𝑒𝑠𝑠
𝐴
=
𝐾𝑣
𝑃=0
𝐾𝑃 = lim 𝑆. 𝐺 𝑆 𝐻(𝑆)
𝑆→0
𝑒𝑠𝑠 =
15
𝐾𝑝 = lim 𝑆
=0
𝑆→0
(𝑆 + 10)(𝑆 + 1)2
1
0
𝑒𝑠𝑠 = ∞
Entrada escalón + perturbación
La perturbación afecta la salida del sistema y por lo tanto modifica el error de estado
estable. La salida del sistema incluyendo la entrada de referencia 𝑉 𝑟 y la perturbación
𝑃 es:
𝑉𝑇 = 𝑉𝑟𝑒𝑓 + 𝑉𝑝𝑒𝑟𝑡
15
0.3
1
(𝑆 + 10)(𝑆 + 1)2
𝑆+1 2
𝑉𝑇 =
∗ +
15
15
𝑆 1+
1+
(𝑆 + 10)(𝑆 + 1)2
𝑆 + 10 𝑆 + 1
∗
2
0.5
𝑆
Luis Edo García Jaimes
EJEMPLO (CONTINUACIÓN)
Simplificando:
15
𝑉𝑇 =
𝑆 𝑆 + 10 𝑆 + 1
0.15(𝑆 + 10)
+
2 + 15
𝑆 𝑆 + 10 𝑆 + 1 2 + 15
Aplicando el teorema del valor final:
𝑉𝑇𝑠𝑠 = lim 𝑆 𝑉𝑇
𝑆→0
15
= lim 𝑆
𝑆→0
𝑆 𝑆 + 10 𝑆 + 1
𝑉𝑇𝑠𝑠
0.15(𝑆 + 10)
+
2 + 15
𝑆 𝑆 + 10 𝑆 + 1 2 + 15
15
0.15 ∗ 10
=
+
= 0.66
10 + 15 10 + 15
𝑒𝑠𝑠 = 𝑉𝑟 − 𝑉𝑇𝑠𝑠 = 1 − 0.66
𝑒𝑠𝑠 = 0.34
𝑒𝑠𝑠 = 34%
Luis Edo García Jaimes
EJEMPLO 2.
En el diagrama de bloques de la figura 𝐾 = 1.5 y 𝐾𝑡 = 0.8. Determinar los coeficientes
de error para las entradas escalón, rampa y parábola y el error de estado estable
para cada entrada.
La solución se inicia reduciendo el lazo de realimentación interno para dejar un solo
lazo.
𝐺𝑤1
100
100
1
+
0.2𝑆
𝑆 =
=
100
1 + 1 + 0.2𝑆 ∗ 0.8 0.2𝑆 + 81
Luis Edo García Jaimes
EJEMPLO 2 (CONTINUACIÓN)
La función de transferencia de lazo abierto es:
100
1
𝐺 𝑆 𝐻 𝑆 = 1.5 ∗
∗
0.2𝑆 + 81 20𝑆
7.5
𝐺 𝑆 𝐻 𝑆 =
𝑆 0.2𝑆 + 81
Coeficiente de error de posición:
7.5
𝐾𝑃 = lim 𝐺 𝑆 𝐻 𝑆 = lim
𝑆→0
𝑆→0 𝑆 0.2𝑆 + 81
𝐾𝑃 = ∞
1
𝑒𝑠𝑠 =
=0
1 + 𝐾𝑃
𝐾𝑣 = 0.0925
𝑒𝑠𝑠 =
1
= 10.8
𝐾𝑣
𝐾𝑎 = 0
𝑒𝑠𝑠 =
1
=∞
𝐾𝑎
Coeficiente de error de velocidad:
𝐾𝑣 = lim 𝑆. 𝐺 𝑆 𝐻 𝑆 = lim 𝑆
𝑆→0
𝑆→0
7.5
𝑆 0.2𝑆 + 81
Coeficiente de error de aceleración:
𝐾𝑎 = lim 𝑆 2 . 𝐺 𝑆 𝐻 𝑆 = lim 𝑆 2
𝑆→0
𝑆→0
7.5
𝑆 0.2𝑆 + 81
Luis Edo García Jaimes
PROGRAMA PARA CALCULAR PARAMETROS DE UN SISTEMA
DE SEGUNDO ORDEN SUBAMORTIGUADO
clc
%Parámetros de un sistema subamortiguado
numT = input('Entre el numerador:');
denT = input('Entre el denominador:');
% Cálculo del valor fi nal
ValorFinal = polyval(numT,0)/polyval(denT,0);
% Cálculo y almacenamiento de valores
[y,x,t] = step(numT,denT);% Respuesta al escalon
% Cálculo del tiempo de crecimiento tr.
p = 1;
while y(p) < 0.1 * ValorFinal,
p = p + 1;
end
q = 1;
while y(q) < 0.9 * ValorFinal,
q = q + 1;
end
Tr = t(q)-t(p)
% Cálculo del tiempo pico tp, seg.
[Y,k] = max(y);
tp = t(k)
% Cálculo del máximo pico de sobreimpulso MP en %
MP = 100 * (Y-ValorFinal)/ValorFinal
% Cálculo del tiempo de establecimiento ts.
a = length(t);
while (y(a)>0.9816 * ValorFinal)&(y(a) < 1.01831 * ValorFinal)
a = a-1;
end
ts = t(a)
Luis Edo García Jaimes
ESTABILIDAD DE SISTEMAS CONTINUOS
La estabilidad es una especificación básica que deben satisfacer los sistemas de
control.
Desde el punto de vista de la descripción externa se dice que un sistema lineal
invariante en el tiempo es estable, si ante una entrada acotada se produce una salida
acotada para todas las posibles condiciones iniciales. Estabilidad BIBO (Bounded
Input Bounded Output).
Existen diversos resultados teóricos que permiten realizar un análisis de estabilidad,
desde el punto de vista de la descripción externa, de un sistema en tiempo continuo
lineal e invariante en el tiempo.
Criterio de Routh-Hurwitz, sobre la ecuación característica.
Nyquist en el dominio de la frecuencia
Diagramas de Bode de Bode, con la respuesta en frecuencia.
El lugar de las raíces en el plano S
Luis Edo García Jaimes
CONDICIÓN DE ESTABILIDAD PARA SISTEMAS
CONTÍNUOS
Para que un sistema continuo sea estable todos sus polos deben estar localizados
en la parte izquierda del semiplano de S. Es decir, el sistema es estable si todos
sus polos tienen la parte real negativa.
Los polos del sistema son las raíces de la ecuación característica que resulta de
igualar a cero el denominar de la función de transferencia del sistema.
Las raíces de la ecuación característica nos ofrecen información no solo del
transitorio del sistema, sino también de su estabilidad.
𝐺(𝑆)
𝐺𝑤 𝑆 =
1 + 𝐺 𝑆 𝐻(𝑆)
Ecuación característica:
1+𝐺 𝑆 𝐻 𝑆 =0
Luis Edo García Jaimes
REGIONES DE ESTABILIDAD PARA SISTEMAS
CONTINUOS EN EL PLANO S
Para que un sistema continuo sea estable todos sus polos deben estar localizados
en la parte izquierda del semiplano de S
Luis Edo García Jaimes
CRITERIO DE ESTABILIDAD DE ROUTH-HURTWISTH
El criterio de Routh-Hurwitz aplicado a la ecuación característica de un sistema
permite conocer si el sistema es estable o no, sin necesidad de calcular las raíces
de dicha ecuación característica.
Sea la función de transferencia:
𝑃(𝑆)
𝐺𝑤 𝑆 =
𝑎𝑛 𝑆 𝑛 + 𝑎𝑛−1 𝑆 𝑛−1 + 𝑎𝑛−2 𝑆 𝑛−2 + ⋯ 𝑎1 𝑆 + 𝑎0
La ecuación característica del sistema es:
𝑎𝑛 𝑆 𝑛 + 𝑎𝑛−1 𝑆 𝑛−1 + 𝑎𝑛−2 𝑆 𝑛−2 + ⋯ 𝑎1 𝑆 + 𝑎0 = 0
Para determinar la estabilidad primero se comprueba que todos los coeficientes
𝑎𝑖 sean positivos. Si hay algún coeficiente negativo o falta el sistema es inestable.
Si se cumple la condición anterior, el sistema puede ser estable o no.
Luis Edo García Jaimes
ARREGLO DE ROUTH-HURTWISTH
Para comprobar si el sistema es estable, se construye el arreglo de Routh-Hurwitz
así:
𝑎𝑛−1 𝑎𝑛−2 − 𝑎𝑛 𝑎𝑛−3
𝑏1 =
𝑎𝑛−1
𝑎𝑛
𝑎𝑛−2 𝑎𝑛−4 𝑎𝑛−6
𝑆𝑛
𝑆 𝑛 −1 𝑎𝑛−1 𝑎𝑛−3 𝑎𝑛−5 𝑎𝑛−7
𝑏2
𝑏3
⋯
𝑆 𝑛 −2 𝑏1
𝑐2
⋯
⋯
𝑆 𝑛 −3 𝑐1
⋯
⋯
⋯
⋯
⋯
⋯
𝑓
𝑆0
𝑎𝑛−1 𝑎𝑛−4 − 𝑎𝑛 𝑎𝑛−5
𝑎𝑛−1 𝑎𝑛−6 − 𝑎𝑛 𝑎𝑛−7
𝑏2 =
𝑏3 =
𝑎𝑛−1
𝑎𝑛−1
𝑏1 𝑎𝑛−3 − 𝑏2 𝑎𝑛−1
𝑐1 =
𝑏1
𝑏1 𝑎𝑛−5 − 𝑏3 𝑎𝑛−1
𝑐2 =
𝑏1
El proceso acaba cuando se calcula la fila de coeficientes en 𝑆 0 que solo posee un
coeficiente no nulo, 𝑓 en la expresión
El criterio de Routh-Hurtwitz dice que el sistema es estable si y sólo si todos
los coeficientes de la primera columna de Routh-Hurwitz son positivos.
Luis Edo García Jaimes
EJEMPLO CRITERIO DE ROUTH
Determinar la estabilidad de un sistema cuya ecuación característica es:
𝑆 4 + 2𝑆 3 + 3𝑆 2 + 4𝑆 + 5 = 0
Arreglo de Routh:
𝑆4
𝑆3
𝑆2
𝑆1
𝑆0
1
2
1
−6
5
2∗3−4∗1
𝑏1 =
=1
2
1∗4−5∗2
𝑐1 =
= −6
1
3
4
5
0
5
0
2∗5−0∗1
𝑏2 =
=5
2
−6 ∗ 5 − 0 ∗ 1
𝑑1 =
=5
−6
Hay un término con signo negativo en la primera columna del arreglo, por lo tanto, el
sistema es inestable.
Existen dos cambios de signo en la primera columna, entonces existen dos raíces
con parte real positiva.
Las raíces de la ecuación característica son: 0.287 ± 1.416 ∗ 𝑖 𝑦 − 1.287 ± 0.857 ∗ 𝑖
Luis Edo García Jaimes
CASO ESPECIAL 1: APARICIÓN DE UN CERO EN LA PRIMERA COLUMNA.
La aparición de un cero en la primera columna crea una indeterminación debida a la
división por cero. Este problema se elimina cambiando el cero por 𝜖 , que es una
cantidad muy pequeña.
Ejemplo: determinar la estabilidad del sistema cuya ecuación característica es:
𝑆 4 + 2𝑆 3 + 4𝑆 2 + 8𝑆 + 5 = 0
𝑆4
𝑆3
𝑆2
𝑆1
𝑆0
𝑏1 =
1
2
0
∞
4
8
5
5
0
0
2∗4−8∗1
=∞
2
2∗5−0∗1
𝑏2 =
=5
2
𝑐1 =
5∗2−0∗8
=∞
0
1
4 5
𝑆4
2
8 0
𝑆3
𝜖
5
𝑆 2 8𝜖 − 10
0
𝑆1
𝜖
𝑆0
5
8 ∗ 𝜖 − 10
𝑐1 =
𝜖
8𝜖 − 10
∗5−0∗𝜖
𝜖
𝑑1 =
=5
8𝜖 − 10
𝜖
8 ∗ 𝜖 − 10
< 0 Inestable
𝜖
Luis Edo García Jaimes
CASO ESPECIAL 2: FILA COMPLETA DE CEROS
Procedimiento
• formar una ecuación auxiliar con los coeficientes de la fila anterior a la de ceros.
• Sustituir la fila de ceros por los coeficientes de la derivada de la ecuación auxiliar.
Ejemplo: determinar la estabilidad del sistema cuya ecuación característica es:
𝑆 4 + 2𝑆 3 + 11𝑆 2 + 18𝑆 + 18 = 0
𝑆 4 1 11 18
𝑆 3 2 18 0
𝑆 2 2 18 0
0
0
𝑆1 0
0
𝑆
2 ∗ 11 − 18 ∗ 1
𝑏1 =
=2
2
2 ∗ 18 − 0 ∗ 1
𝑏2 =
= 18
2
2 ∗ 18 − 18 ∗ 2
𝑐1 =
=0
2
2∗0−0∗2
𝑐2 =
=0
2
𝑆4
𝑆3
𝑆2
𝑆1
𝑆0
1
2
2
4
18
11
18
18
0
18
0
0
0
𝐸𝑐𝑢𝑎𝑐𝑖ó𝑛 𝑎𝑢𝑥𝑖𝑙𝑖𝑎𝑟 ∶ 2𝑆 2 + 18
𝐷𝑒𝑟𝑖𝑣𝑎𝑑𝑎 𝐸𝑐𝑢𝑎𝑐𝑖ó𝑛: 4𝑆
𝐸𝑛𝑡𝑜𝑛𝑐𝑒𝑠: 𝑐1 = 4
𝑑1 =
4 ∗ 18 − 2 ∗ 0
= 18
4
Todos los términos de la primera columna son positivos: el sistema es estable
Luis Edo García Jaimes
EJEMPLO DE APLICACIÓN CRITERIO DE ROUTH
Para el sistema de control de la figura obtenga el valor o rango de valores de 𝐾 para
los cuales el sistema es estable
La función de transferencia de lazo cerrado del sistema es:
𝐺𝑤
𝐾 𝑆−2
𝐾 𝑆−2
(𝑆 + 1)(𝑆 2 + 6𝑆 + 25)
𝑆 =
= 3
𝐾 𝑆−2
𝑆 + 7𝑆 2 + 31 + 𝐾 𝑆 + 25 − 2𝐾
1+
(𝑆 + 1)(𝑆 2 + 6𝑆 + 25)
Ecuación característica del sistema:
𝑆 3 + 7𝑆 2 + 31 + 𝐾 𝑆 + 25 − 2𝐾 = 0
1
𝑆3
7
𝑆 2 192 + 9𝐾
𝑆1
7
𝑆0
25 − 2𝐾
31 + 𝐾
25 − 2𝐾
0
Para estabilidad todos los elementos de la primera columna deben ser positivos
192 + 9𝐾
>0
7
𝑦
25 − 2𝐾 > 0
Resolviendo las dos desigualdades se obtiene: −21.33 < 𝐾 < 12.5
Luis Edo García Jaimes
EJERCICIOS
Hallar el valor o rango de valores de 𝐾, para los cuales los sistemas de control dados
son estables.
Luis Edo García Jaimes